Спосіб розпізнавання класу надводних кораблів на збуреній морській поверхні
Номер патенту: 99470
Опубліковано: 10.06.2015
Автори: Горобець Володимир Миколайович, Головко Михайло Іванович, Зотова Ольга Сергіївна, Ківва Фелікс Васильович, Гутнік Віктор Григорович, Коворотний Олексій Леонідович, Зотов Сергій Михайлович








Формула / Реферат
Спосіб розпізнавання класу надводних кораблів на збуреній морській поверхні, який полягає в тому, що випромінюють в бік спостережуваного корабля електромагнітну енергію, приймають відбитий від нього сигнал, порівнюють інформаційні ознаки спостережуваного корабля з еталонними наперед відомими ознаками надводних кораблів і за результатами порівняння приймають рішення стосовно належності спостережуваного корабля до означеного класу надводних кораблів, який відрізняється тим, що як основну еталонну ознаку використовують коефіцієнт К, пропорційний відношенню лінійних швидкостей бортової і кільової хитавиць надводного корабля, який знаходять за формулою:
де ![]() ,
, ![]() - сумарні складові лінійних швидкостей бортової і кільової хитавиць для двох послідовних позицій надводного корабля,
- сумарні складові лінійних швидкостей бортової і кільової хитавиць для двох послідовних позицій надводного корабля,
![]() і
і ![]() - курсові кути між лінією візування і діаметральною площиною надводного корабля для двох вищезазначених позицій відповідно.
- курсові кути між лінією візування і діаметральною площиною надводного корабля для двох вищезазначених позицій відповідно.
Текст
Реферат: Спосіб розпізнавання класу надводних кораблів на збуреній морській поверхні, який полягає в тому, що випромінюють в бік спостережуваного корабля електромагнітну енергію, приймають відбитий від нього сигнал, порівнюють інформаційні ознаки спостережуваного корабля з еталонними наперед відомими ознаками надводних кораблів і за результатами порівняння приймають рішення стосовно належності спостережуваного корабля до означеного класу надводних кораблів. Як основну еталонну ознаку використовують коефіцієнт К, пропорційний відношенню лінійних швидкостей бортової і кільової хитавиць надводного корабля, який знаходять за певною формулою. UA 99470 U (12) UA 99470 U UA 99470 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до області радіолокації і може бути використана в когерентних радіолокаційних станціях для розпізнавання класу надводних кораблів на збуреній морській поверхні. Відомий спосіб розпізнавання цілей, що полягає в випромінюванні в бік цілі електромагнітної енергії, прийомі відбитого від цілі сигналу, обробки останнього і розпізнаванні цілі по прийнятому зображенню геометричних розмірів і конфігурації (патент США №3978480, МПК G01S 9/00, 1974.) Недоліком цього способу є його низька надійність. На практиці більшість реальних об'єктів належать до класу складних радіолокаційних цілей. Тому похибка розпізнавання спостережуваної цілі значно збільшується, якщо ціль, наприклад корабель, знаходиться на збуреній морській поверхні або розпізнанню цілі заважають метеоутворення. Крім того, недоліком даного способу є те, що він не дозволяє визначити клас корабля. Відомий спосіб розпізнавання протяжної вздовж кутової координати цілі, що полягає у випромінюванні в бік спостережуваної цілі електромагнітної енергії, прийомі відбитого від цілі сигналу, вимірюванні ширини діаграми направленості антени за наявністю цілі ΘЦ, визначенні збільшення ширини діаграми направленості антени ΔΘЦ=ΘЦ-ΘА, де ΘА - значення ширини діаграми направленості антени, і визначенні відношення β = ΔΘЦ/ΘА, якщо β>0,01, то приймають рішення, що ціль є протяжною вздовж кутової координати; якщо β < 0,01, приймають рішення, що ціль є точковою (патент РФ №2359285, МПК G01S 13/53, 2009.) Недоліком даного способу є його низька інформативність: він не дозволяє розпізнати ціль по класах, наприклад, указати тип корабля. Крім того, значно знижується надійність цього способу в тому випадку, якщо ціль (корабель) знаходиться на збуреній морській поверхні. Найбільш близьким до запропонованого є спосіб розпізнавання класу надводних кораблів на збуреній морській поверхні, який полягає в тому, що випромінюють в бік спостережуваного корабля електромагнітну енергію, приймають відбитий від нього сигнал, порівнюють інформаційні ознаки спостережуваного корабля з еталонними наперед відомими ознаками надводних кораблів і за результатами порівняння приймають рішення стосовно належності спостережуваного корабля до означеного класу надводних кораблів (патент РФ №2423722, 9 МПК 13/02, 2011.) Слід зазначити, що даний спосіб передбачає отримання радіолокаційного зображення (РЛЗ) спостережуваного корабля; як модель для порівняння інформаційних ознак використовують РЛЗ реальних надводних кораблів відомих класів. РЛЗ отримують із комплексних точкових моделей (КТМ), враховуючи параметри радіолокатора, вплив качки та рискання корабля. Вихідні КТМ формують на основі реальних зображень кораблів відомих класів, які отримують за умов контролю морського коливання (в бухті, на стоянці) під час натурних випробувань космічних кораблів, які споряджені радіолокаторами з синтезованою апертурною антеною. В процесі формування КТМ кораблів спочатку відокремлюють пікселі, які належать безпосередньо кораблю, від елементів оточуючого фону (морської поверхні). Потім на отриманому РЛЗ корабля послідовно виділяють локальні джерела відбиття, які представляють у вигляді точкових відбивачів з відповідними значеннями амплітуди і фази; значення цих показників заносять до масиву. Для кожного класу кораблів, згідно з даними, формують КТМ з координатами центрів розсіювання відбитих сигналів, які занесені до масиву, при цьому кожній точці КТМ присвоюють значення висоти надбудов згідно з розподіленням висот та інтенсивностей відбиваючих елементів еталонних (відомих) кораблів. Потім розраховують величини зміщення відбивачів корабля для всілякого можливого набору стану морської поверхні; їх значення вводяться в отриману тривимірну КТМ; після цього відтворюють РЛЗ. Основним недоліком цього способу є його складність, яка потребує значного обсягу технічних засобів. Дійсно, спочатку формують еталонні ознаки для означених (відомих) класів надводних кораблів по зображеннях, які сформовані на основі обмеженого набору реальних РЛЗ кораблів відомих класів; потім перетворюють їх в комплексну точкову тривимірну модель, корегують модель згідно з фотознімками або кресленнями корабля і математичним моделюванням, що дозволяє врахувати параметри радіолокатора, варіації умов спостереження, вплив хитавиці та рискання корабля. В основу корисної моделі поставлена задача удосконалити спосіб розпізнавання класу надводних кораблів на схвильованій морській поверхні шляхом використання основної еталонної ознаки, яка базується на гідродинамічній теорії хитавиці корабля і разом з іншими другорядними ознаками дозволяє з достатнім ступенем повноти розпізнати клас корабля, тим самим забезпечити спрощення процесу розпізнавання. 1 UA 99470 U 5 Поставлена задача вирішується тим, що в способі розпізнавання класу надводних кораблів на збуреній морській поверхні, який полягає в тому, що випромінюють в бік спостережуваного корабля електромагнітну енергію, приймають відбитий від нього сигнал, порівнюють інформаційні ознаки спостережуваного корабля з еталонними наперед відомими ознаками надводних кораблів і за результатами порівняння приймають рішення стосовно належності спостережуваного корабля до означеного класу надводних кораблів, згідно з корисною моделлю, як основну еталонну ознаку використовують коефіцієнт К, пропорційний відношенню лінійних швидкостей бортової і кільової хитавиць надводного корабля, який знаходять за формулою: 10 1 2 Vr cos 2 Vr cos 1 1 2 1 Vr 1 де 15 20 25 1 Vr 1 2 sin 2 Vr 2 sin 1 , 2 Vr 2 - сумарні складові лінійних швидкостей бортової і кільової хитавиць для двох послідовних позиції надводного корабля, 1 і 2 - курсові кути між лінією візування і діаметральною площиною надводного корабля для двох вищезазначених позицій відповідно. Відомо, що поведінка корабля з достатнім ступенем повноти описується за допомогою гідродинамічної теорії хитавиці. Корабель як тверде тіло, частково занурене в рідину, має шість ступенів свободи, три з яких пов'язані з рухом тіла вздовж координатних осей, а інші три - з обертанням навколо цих осей. Цим переміщенням відповідають шість видів хитавиць: поздовжньо-горизонтальна, поперечно-горизонтальна і вертикальна, а також бортова, кільова і рискання. Зазвичай, вертикальна і кільова, а також поздовжньо-горизонтальна і бортова качки існують сумісно. Поздовжньо-горизонтальна качка практично не впливає на вертикальну і кільову качки і не залежить від них. (Ремез Ю.В. Качка корабля. - Л.: Судостроение, 1983, 324 с.) При коливаннях корабля виділяють три основні види хитавиць: вертикальну, бортову і кільову. Вони відбуваються під впливом відновлювальних сил, які намагаються повернути корабель до стану сталої рівноваги. Як прийнято в лінійній теорії хитавиці, вважаємо, що бортові і кільові коливання мають гармонічний характер. Проведений аналіз вищезазначених видів хитавиці в рамках лінійної теорії хитавиці на тихій воді дозволив отримати вирази для періодів вільних коливань: для бортової хитавиці: Б 0Б sin Б t ; Б 2 30 , x 44 2 ; Б mgh Б ; (1) для кільової хитавиці: 0 sin t ; 2 Y 55 2 ; , mgH (2) де Б і - власні частоти бортової і кільової хитавиць відповідно; 0Б і 0 - амплітуди бортової і кільової хитавиць відповідно; 35 40 45 50 ІХ і ΙY - моменти інерції маси корабля відносно осей бортової і кільової хитавиць, відповідно; М44 і М55 - приєднані маси корабля при бортовій і кільовій качках, які залежать від форми зануреної частини корабля; h i Η - поперечна і поздовжня метацентричні висоти; m - маса корабля. Лінійна теорія хитавиці для випадку регулярного хвилювання морської поверхні, яка дозволяє враховувати тиск набігаючих на корабель хвиль, дає можливість розглядати корабель як лінійну систему. Остання описується диференційними рівняннями, права частина яких визначена характеристиками набігаючих хвиль. Рішення цих рівнянь дозволяє отримати амплітудно-частотні і фазочастотні характеристики вертикальної, бортової і кільової хитавиць. Амплітудно-частотні характеристики являють собою криві з вираженим резонансним характером на частотах набігаючих хвиль, які співпадають з частотами власних коливань корабля для відповідних видів хитавиць. Оскільки в умовах регулярного хвилювання морської поверхні уявна частота може змінюватися в широких межах в залежності від швидкості корабля і напрямку його руху відносно фронту хвилі, ймовірність створення резонансних умов для бортової і кільової качок достатньо велика. Цим підтверджується добре відомий з практики мореплавання той факт, що яким би не був курс і швидкість корабля, середній період бортової хитавиці для регулярного хвилювання морської поверхні дорівнює періоду вільних коливань корабля. Значення фізичних величин в формулах (1) і (2) для періодів коливань різних класів 2 UA 99470 U 5 10 кораблів відрізняються одне від одного, а значить відрізнятимуться і періоди бортової і кільової качок. Таким чином, якщо виділити величини періодів бортових і кільових коливань або їх комбінації, отримуємо ознаки, які відповідають конкретним класам кораблів. Найбільш істотний вплив на розсіяний сигнал мають бортова і кільова хитавиці за умови, що різність між рівнями радіолокаційної станції (РЛС) і корабля відносно горизонталі значно менше ніж відстань між ними. Кільова хитавиця відбувається навколо осі ОХ, а бортова - навколо осі OY нерухомої системи координат, початок якої співпадає з центром маси корабля. Вектори швидкостей кільової Vк і бортової Vб качок для будь-якого локального центру розсіювання (ЛЦР) знаходяться в ортогональних площинах. На фіг. 1 схематично зображений один і той же корабель, який рухається відносно РЛС під різними кутами γ1 і γ2. В загальному випадку, при курсовому куті γ між діаметральною площиною корабля і лінією візування r РЛС, сумарна складова V r 15 Vr Vkr лінійних швидкостей кільової і бортової хитавиць на лінії візування дорівнює: V бr Vk cos V б sin . (3) Запишемо систему рівнянь для двох положень корабля: 1 V r1 V k cos 1 V б sin 1 2 V r V k cos 2 V б sin 2 2 (4) Розв'яжемо дану систему рівнянь відносно Vк і Vб. Отримаємо: 1 2 Vr sin 2 Vr sin 1 Vк 1 2 cos 1 sin 2 cos 2 sin 1 , Vб 1 2 Vr cos 2 Vr cos 1 1 2 . cos 1 sin 2 cos 2 sin 1 (5) Знайдемо коефіцієнт К: 20 1 2 Vб Vr1 cos 2 Vr2 cos 1 , 1 2 Vк Vr sin 2 Vr sin 1 1 2 (6) При когерентній обробці вихідний сигнал фазового детектора РЛС має вигляд: ui t cos ДС t i t , i 1 2 (7) uД t ДС де корабля; i t 25 2Vr - кутова доплерівська частота, яка обумовлена поступальною швидкістю 4 t V t dt 0 r - величина, яка характеризує качку корабля відносно точки О; λ - довжина хвилі РЛС; Vr - поступальна швидкість корабля; Vr - швидкість руху ЛЦР навколо точки О. 30 Вихідний сигнал фазового детектора (дивись вираз 7) являє собою частотно-модульоване коливання з центральною частотою ωДС, яка зв'язана з швидкістю руху точки О, і модулюючим сигналом βi (t). Кожна складова модуляції Vr являє собою частотно-модульований сигнал з ширинами смуг 4 0Б Б sin , 4 0к cos (8) Fмод.б Fмод.к 35 40 Як показано в теорії кутової модуляції (Латхи Б.П. Системы передачи информации. М.: Связь, 1971. 318 с), частотна модуляція є широкосмуговою, якщо коефіцієнт модуляції набагато більший від одиниці. На практиці, як показують числові оцінки, при локації кораблівЮ, коефіцієнт модуляції завжди набагато більший від одиниці, тому ширина смуги спектра при частотній модуляції, яка викликана декількома гармонічними функціями, дорівнює сумі ширин спектрів кожної з функцій. Виходячи з цього, для бортової і кільової хитавиць можна записати: 3 UA 99470 U 5 10 15 20 25 30 35 ΔF = ΔFмод.б + ΔFмод. к. (9) Таким чином, ширина смуги спектра пропорційна сумарному вектору швидкості бортових і кільових коливань корабля. Отже, по ширині доплерівського спектра сигналу з виходу фазового детектора РЛС можна визначити сумарний вектор швидкостей бортових і кільових коливань корабля. Якщо відомі напрямок руху корабля і ракурсний кут, можна знайти коефіцієнт К (дивись вираз 6). Враховуючи той факт, що періоди і кути бортової і кільової хитавиць суттєво не змінюються при сталих значеннях швидкості і напрямку руху корабля за короткий проміжок часу, а хвилювання морської поверхні однаково на цьому відрізку шляху, припускаємо, що відношення лінійних швидкостей залишається приблизно однаковим. Таким чином, коефіцієнт К може бути вибраним як основна еталонна ознака для розпізнавання класу кораблів на схвильованій морській поверхні, і його використання в сукупності з другорядними ознаками дозволяє спростити спосіб розпізнавання класу кораблів і зменшити обсяг технічних засобів для його здійснення. Суть корисної моделі пояснюється ілюстраціями. На фіг. 1 - схематичне зображення корабля в двох послідовних його позиціях; на фіг.2 - блок-схема пристрою для здійснення способу розпізнавання класу надводних кораблів на схвильованій морській поверхні. Пристрій для здійснення даного способу (дивись фіг.2) містить в собі, наприклад, когерентну вузькосмугову РЛС 1 сантиметрового діапазону довжин хвиль з антеною, блок 2 вибору режиму роботи, вхід якого підключений до виходу РЛС 1, а перший вихід - до входу блоку 3 формування еталонних ознак означених (відомих) класів надводних кораблів; при цьому другий вихід блоку 2 підключений до входу блока 4 виділення ознак спостережуваного корабля, вихід якого з'єднаний з першим входом пристрою 5 порівняння. Перший вихід блока 3 підключений до входу банку 6 еталонних ознак, а другий його вихід з'єднаний з першим входом індикатора 7, до другого входу якого підключений вихід пристрою 5 порівняння; при цьому до другого входу останнього підключений блок 6 еталонних ознак. Пристрій для здійснення заявленого способу працює таким чином. Спочатку формують банк 6 еталонних ознак. Для цього за допомогою блока 2 установлюють режим роботи пристрою на отримання даних радіолокаційних спостережень Для формування основної еталонної ознаки - коефіцієнта К, корабельна або берегова РЛС1, яка працює в неперервному режимі, випромінює електромагнітну енергію в бік надводного корабля відомого класу. В двох послідовних позиціях корабля фіксують курсові кути γ1 і γ2 між лінією візування і діаметральною площиною корабля і відбиті від корабля сигнали. Кожний з них приймається РЛС1, на виході фазового детектора якої отримують частотно-модульований сигнал. Останній надходить на вхід блока 3, в якому аналізуються отримані дані і проводиться спектральний аналіз сигналу. Ширина доплерівського спектра сигналу в двох вищезазначених позиціях пропорційна сумарним складовим лінійних швидкостей бортової і кільової качок 1 Vr 1 40 45 50 55 1 Vr 1 і 2 Vr 2 . В 2 Vr 2 блоку 3 на основі даних γ1,γ2, і згідно з алгоритмом формується основна еталонна ознака (коефіцієнт К). Отримані дані з першого виходу блока 3 вносяться в банк 6. Крім того, для уточнення класу корабля в банк 6 можуть бути внесені такі другорядні ознаки, якими є максимальна швидкість корабля, ефективна поверхня розсіювання, елементи динамічної матриці поляризації, частоти випромінювання власних радіотехнічних засобів означеного корабля та інше. З другого виходу банка 6 сигнал подається на перший вхід індикатора 7, на якому відображаються отримані дані. Коли банк 6 є сформованим, пристрій готовий до розпізнавання класу спостережуваного корабля. Для цього блок 2 переводять до режиму розпізнавання. В цьому разі відбитий від спостережуваного корабля сигнал приймається РЛС1, з виходу якої через блок 2 з другого його виходу подається на вхід блока 4, в якому відбувається виділення ознак спостережуваного корабля. Вихідний сигнал з блока 4 надходить на перший вхід пристрою 5 порівняння, на другий вхід якого надходять сигнали з виходу банка 6. В пристрої 5, згідно з закладеним алгоритмом, проводиться порівняння інформаційних ознак спостережуваного корабля з еталонними і за результатами порівняння приймається рішення стосовно належності спостережуваного корабля до означеного класу надводних кораблів. Вихідний сигнал пристрою 5 порівняння надходить на другий вхід індикатора 7, на якому відображається клас корабля. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Спосіб розпізнавання класу надводних кораблів на збуреній морській поверхні, який полягає в тому, що випромінюють в бік спостережуваного корабля електромагнітну енергію, приймають 4 UA 99470 U 5 відбитий від нього сигнал, порівнюють інформаційні ознаки спостережуваного корабля з еталонними наперед відомими ознаками надводних кораблів і за результатами порівняння приймають рішення стосовно належності спостережуваного корабля до означеного класу надводних кораблів, який відрізняється тим, що як основну еталонну ознаку використовують коефіцієнт К, пропорційний відношенню лінійних швидкостей бортової і кільової хитавиць надводного корабля, який знаходять за формулою: 1 Vr cos 2 Vr2 cos 1 1 1 Vr 1 2 sin 2 Vr2 2 sin 1 , 1 де Vr , Vr2 - сумарні складові лінійних швидкостей бортової і кільової хитавиць для двох 1 10 2 послідовних позицій надводного корабля, 1 і 2 - курсові кути між лінією візування і діаметральною площиною надводного корабля для двох вищезазначених позицій, відповідно. 5 UA 99470 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюHorobets Volodymyr Mykolaiovych, Kivva Feliks Vasyliovych, Zotov Serhii Mykhailovych, Holovko Mykhailo Ivanovych, Kovorotnyi Oleksii Leonidovych, Hutnyk Viktor Hryhorovych
Автори російськоюГоробец Владимир Николаевич, Кивва Феликс Васильевич, Зотов Сергей Михайлович, Головко Михаил Иванович, Коворотный Алексей Леонидович, Гутник Витор Григорович
МПК / Мітки
МПК: G01S 13/02
Мітки: спосіб, збуреній, кораблів, розпізнавання, надводних, морській, поверхні, класу
Код посилання
<a href="https://ua.patents.su/8-99470-sposib-rozpiznavannya-klasu-nadvodnikh-korabliv-na-zburenijj-morskijj-poverkhni.html" target="_blank" rel="follow" title="База патентів України">Спосіб розпізнавання класу надводних кораблів на збуреній морській поверхні</a>
Пристрій радіолокаційного розпізнавання надводних об’єктів

Номер патенту: 105980
Опубліковано: 10.07.2014
Автори: Черменьова Ірина Петрівна, Миронов Павло Олександрович, Миронов Олександр Федорович, Краснов Леонід Михайлович
МПК: G01S 13/78
Мітки: радіолокаційного, розпізнавання, об'єктів, надводних, пристрій
Формула / Реферат:
Пристрій радіолокаційного розпізнавання надводних об'єктів, що містить передавач, приймач, передавальну і приймальну антени і послідовно з'єднані перший змішувач, перший фільтр нижніх частот, другий змішувач, другий фільтр нижніх частот і керований генератор, причому вхід передавальної антени підключений до першого виходу передавача, другий вихід якого приєднаний до першого входу першого змішувача, до другого входу якого через приймач...
Спосіб запобігання загибелі та піднімання затоплених підводних кораблів
Номер патенту: 63165
Опубліковано: 15.01.2004
Автори: Зорін Андрій Микитович, Вершинін Валерій Афанасійович, Алєксєєв Станіслав Георгієвич
МПК: B63C 7/08
Мітки: кораблів, загибелі, піднімання, затоплених, запобігання, підводних, спосіб
Формула / Реферат:
Спосіб запобігання загибелі і піднімання затоплених підводних кораблів, що включає надпалубне остроплювання балонів до затопленого корабля і їх наповнення повітрям, який відрізняється тим, що балони у складеному стані розміщують між стінками внутрішнього і зовнішнього корпусів підводного корабля з урахуванням розподілу його ваги та водотонажності, причому балони з'єднують з індивідуальним джерелом стиснутого газу через керований клапан, який...
Надшвидкісний засіб ураження надводних та підводних цілей
Номер патенту: 47374
Опубліковано: 25.01.2010
Автори: Блаженний Валерій Іванович, Слєпов Лев Іванович, Бєляєв Сергій Юрійович, Даневич Володимир Феодосійович
МПК: F42B 17/00
Мітки: ураження, надшвидкісний, підводних, засіб, надводних, цілей
Формула / Реферат:
Надшвидкісний засіб ураження надводних та підводних цілей, який містить корпус, основне сопло реактивної тяги, бойовий заряд, реактивний двигун, пристрій керування, який відрізняється тим, що додатково містить розподільчий пристрій та одне або більше додаткові сопла реактивної тяги, які розміщені в передній частині корпусу, під кутом до 45° від подовжньої осі в напрямку руху надшвидкісного засобу ураження надводних та підводних цілей.
Спосіб захисту від обростання підводної поверхні корпусів суден і споруд, які переміщаються в морській воді
Номер патенту: 74805
Опубліковано: 15.02.2006
Автори: Рибалов Ігор Іванович, Кислицька Галина Єрефеївна, Карпенко Віктор Андрійович, Ожиганов Олег Юрійович, Шевченко Ольга Федорівна, Ожиганов Юрій Григорович
МПК: B63B 59/00
Мітки: води, захисту, суден, переміщаються, обростання, морській, споруд, поверхні, підводної, спосіб, корпусів
Формула / Реферат:
Спосіб захисту від обростання підводної поверхні корпусів суден і споруд, які переміщаються в морській воді, що включає покривання підводної частини корпусів захисним складом, який відрізняється тим, що як захисний склад використовують речовину для акумулювання токсинів з морської води - композиційний матеріал FeS, S, SіО2, що забезпечує нагромадження токсинів під час руху судна і виділення їх у воду при стоянці, виключаючи тим самим...
Надшвидкісний засіб ураження надводних та підводних цілей
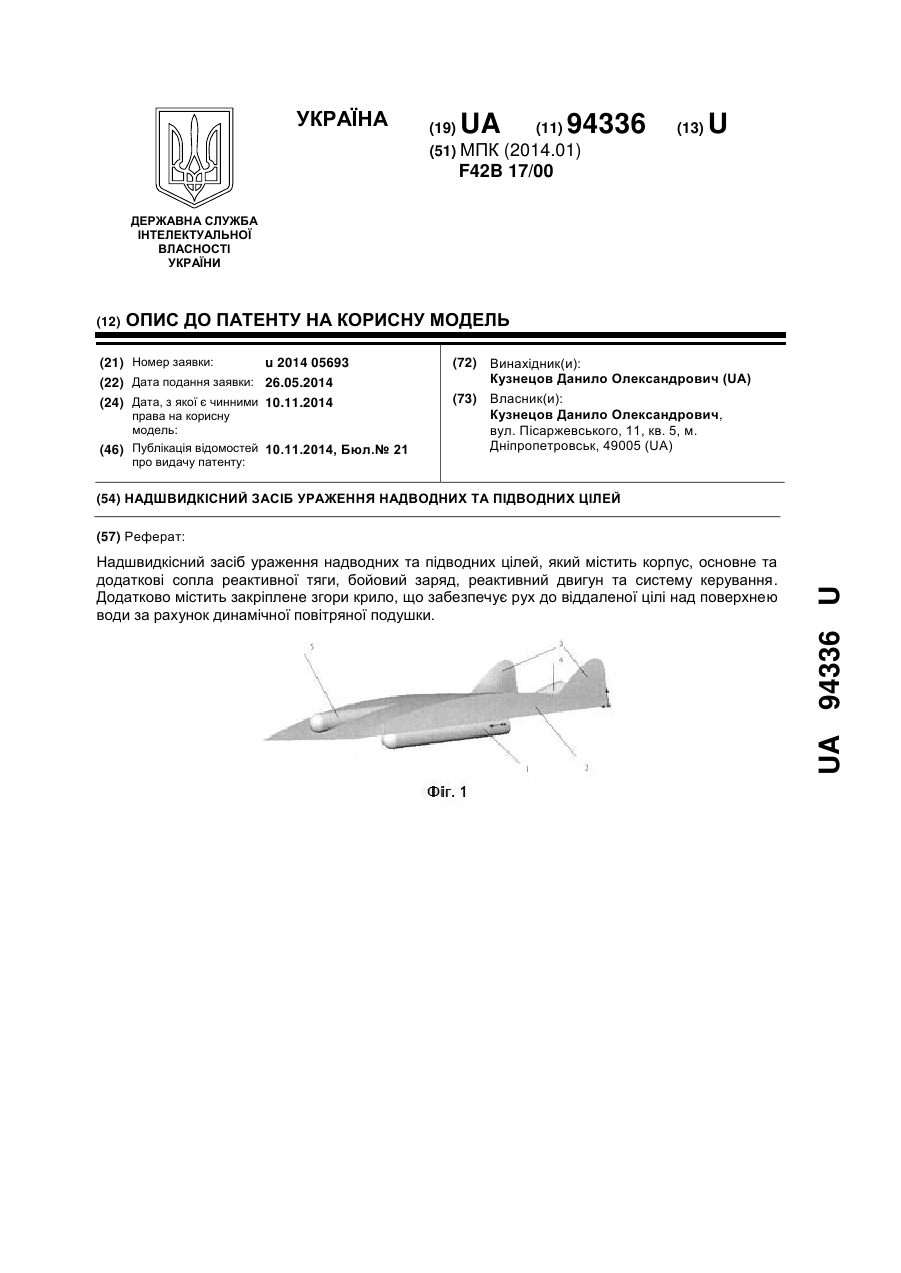
Номер патенту: 94336
Опубліковано: 10.11.2014
Автор: Кузнецов Данило Олександрович
МПК: F42B 17/00
Мітки: надшвидкісний, цілей, надводних, засіб, ураження, підводних
Формула / Реферат:
1. Надшвидкісний засіб ураження надводних та підводних цілей, який містить корпус, основне та додаткові сопла реактивної тяги, бойовий заряд, реактивний двигун та систему керування, який відрізняється тим, що додатково містить закріплене згори крило, що забезпечує рух до віддаленої цілі над поверхнею води за рахунок динамічної повітряної подушки.2. Засіб за п. 1, який відрізняється тим, крило має власний двигун та пристрій для...
Попередній патент: Спосіб визначення віку та статі великої рогатої худоби за остеометричними параметрами носомозкового відділу черепа
Наступний патент: Ґрунтувальна композиція для антикорозійного покриття
Випадковий патент: Вантажний вагон