Пристрій контролю для валкової дробарки
Формула / Реферат
1. Валкова дробарка, що має два валки (1) та щонайменше один пристрій (3) контролю для контролю поверхні валка (1) валкової дробарки, яка містить:
випромінювач (4) світла для проектування лінії (5) на поверхню валка (1),
пристрій (6) захоплення зображення для захоплення зображення ділянки поверхні, причому ділянка включає принаймні частину проектованої лінії (5), і
процесорний блок (7) для обробки зображення для визначення інформації про цю поверхню.
2. Валкова дробарка за п. 1, в якому випромінювачем (4) світла є лазер.
3. Валкова дробарка за п. 1 або п. 2, в якій пристрій (6) захоплення зображення є датчиком камери.
4. Валкова дробарка за будь-яким з попередніх пунктів, в якій інформацією про поверхню користуються для виявлення пошкоджених або відсутніх зносостійких штифтів, виявлення пошкоджених або відсутніх крайових блоків та/або виявлення пошкоджених або відсутніх фланців.
5. Валкова дробарка за будь-яким з попередніх пунктів, в якій інформацією про поверхню користуються для отримання профілю поверхні для визначення зносу.
6. Валкова дробарка за будь-яким з попередніх пунктів, в якій пристрій (6) захоплення зображення виконано для створення зображення валка (1), в той час як валок (1) обертається, причому пристрій (6) захоплення зображення виконано для зняття множини зображень поверхні за одне обертання валка (1).
7. Валкова дробарка за п. 5, яка містить детектор (8) обертання для виявлення положення обертання валка (1).
8. Валкова дробарка за п. 6, в якій блок (7) обробки виконано для пов'язування виявленого обертального положення із зображенням, створеним з допомогою пристрою (6) захоплення зображення.
9. Валкова дробарка за п. 6 або п. 7, яка містить пам'ять (9) для зберігання попереднього зображення поверхні валка.
10. Валкова дробарка за п. 8, в якій блок (7) обробки виконано для збереження множини зображень поверхні валка, знятих в різних обертальних положеннях валка (1), і для формування поточного зображення поверхні валка з допомогою знятих зображень.
11. Валкова дробарка за п. 9, в якій блок (7) обробки виконано для порівняння поточного зображення поверхні валка з попереднім зображенням поверхні валка.
12. Валкова дробарка за будь-яким з попередніх пунктів, в якій блок (7) обробки виконано для визначення щонайменше одного параметра з групи, що складається зі зміщення першої точки на поверхні валка від точки відліку, яскравості першої точки на поверхні валка, кольору першої точки на поверхні валка і температури точки на поверхні валка.
13. Валкова дробарка за будь-яким з попередніх пунктів, яка є валковою дробаркою високого тиску.
14. Валкова дробарка за будь-яким з пп. 1-12, яка є класифікатором.
15. Застосування валкової дробарки за будь-яким з пп. 1-14 для визначення зносу поверхні валка (1) валкової дробарки.
16. Застосування валкової дробарки за будь-яким з пп. 1-14 для визначення відсутності зносу корпуса в локальному місці на поверхні валка (1) валкової дробарки, в якому наявність зносу корпуса передбачено.
17. Спосіб контролю валкової дробарки за будь-яким з пп. 1-14, який полягає в тому, що
проектують лінії світла на поверхню валка валкової дробарки,
створюють зображення ділянки поверхні, яка включає щонайменше частину проектованої лінії,
обробляють зображення для визначення інформації про поверхню.
18. Машинозчитуваний носій інформації, що містить програмний код, який призначений для визначення зносу поверхні валка валкової дробарки і сконфігурований для виконання процесором операцій способу за п. 17.
Текст
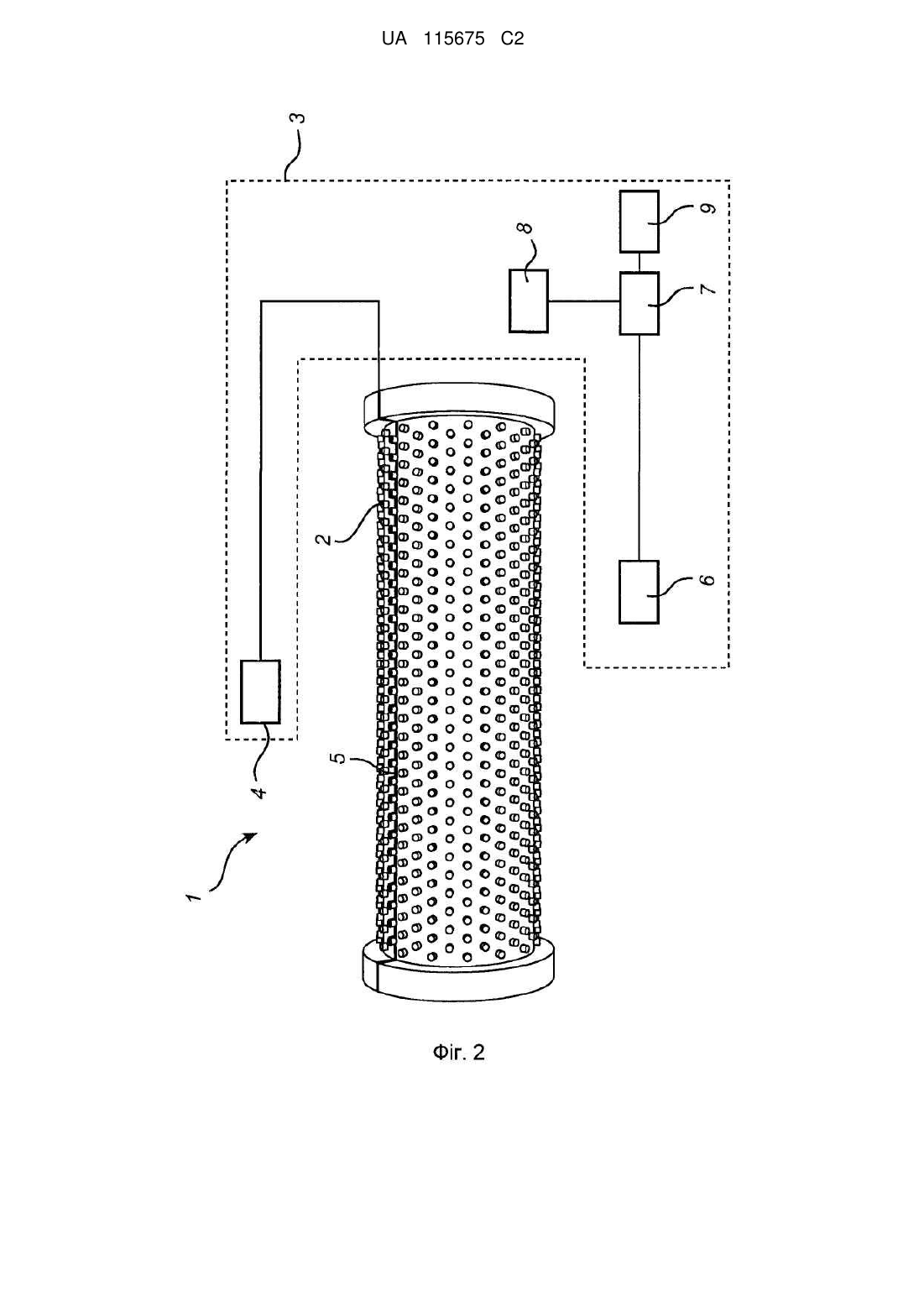
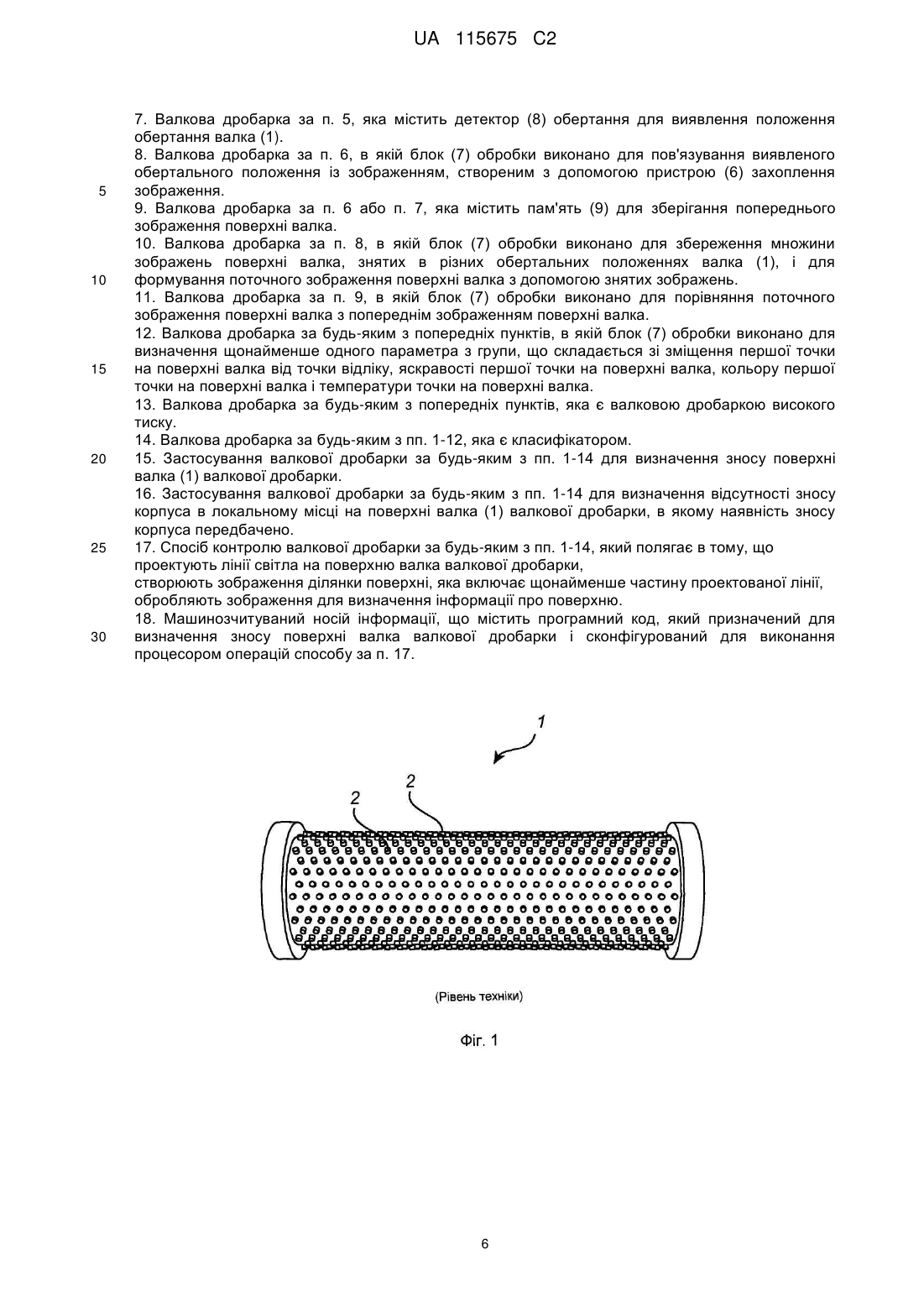
Реферат: Винахід належить до пристрою (3) контролю для контролю поверхні валка (1) валкової дробарки. Пристрій (3) контролю містить випромінювач (4) світла для проектування лінії (5) на поверхню валка (1), пристрій захоплення зображення (6) для створення зображення ділянки поверхні, яка включає щонайменше частину проектованої лінії (5) і блок (7) процесора для обробки зображення для визначення інформації про поверхню. Винахід також стосується валкової дробарки високого тиску, класифікатора, використання пристрою (3) контролю, способу контролю поверхні валка валкової дробарки та комп'ютерної програми. UA 115675 C2 (12) UA 115675 C2 UA 115675 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід стосується пристрою контролю для контролю поверхні валка валкової дробарки. Винахід також стосується валкової дробарки високого тиску, класифікатора, використання пристрою контролю, способу контролю поверхні валка валкової дробарки та комп'ютерної програми. При дробленні або подрібненні каміння, руди, цементного шлаку та інших твердих матеріалів можуть бути використані валкові дробарки з двома, як правило, паралельними валками, які обертаються в протилежних напрямках, назустріч один одному, і які розділені зазором. Матеріал для дроблення подають в зазор під дією сили тяжіння або дросель-подачею. Один з типів валкової дробарки називається "валками подрібнення високого тиску" або "валковими дробарками високого тиску". Цей тип валкової дробарки використовує техніку подрібнення, звану "міжчастинковим подрібненням". Тут матеріал для подрібнення або дроблення подрібнюють не тільки робочою поверхнею валків, а також частинками матеріалу для дроблення, внаслідок цього і назва "міжчастинкове подрібнення". Перевага міжчастинкового подрібнення в тому, що ефективне подрібнення може бути досягнуто, навіть при дуже малих розмірах частинок, зі зменшеним споживанням енергії в порівнянні з багатьма іншими методами дроблення. Під час процесу дроблення або подрібнення зовнішні поверхні валків піддаються надзвичайно високим навантаженням, через які, серед іншого, виникає високий знос. Було відомо, що протидіяти цьому зносу можна з допомогою надання різної форми та покриття поверхням валків, що піддаються зносу. Одним із загальних заходів - є забезпечення зовнішніх поверхонь валків штифтами, що більш зносостійкі, підходять для виробництва і підтримки автогенним захистом поверхні від зносу. Тим не менш, через величезні навантаження, прикладені до валків, навіть зносостійкі штифти, вставлені в поверхневі області, в кінцевому рахунку зношуються, пошкоджуються або можуть навіть відпасти, і повинні бути замінені. Зважаючи на це, валки повинні бути перевірені, щоб визначити, коли зносостійкий штифт необхідно змінити. Патент ЕР 509809 розкриває спосіб контролю зносу кругової циліндричної поверхні дробарки або валків дробарки. У способі довжина кола вала сканується в різних положеннях вздовж довжини вала, щоб отримати фактичні значення для відстані поверхні валка від початкових координат. Ці фактичні значення порівнюються з відповідними наперед заданими значеннями відстані для визначення будь-яких відхилень між фактичними значеннями відстані і попередніми значеннями відстані. Проблема з описаним вище способом в тому, що пристрій має величезну кількість частин, потрібних для застосування. На додаток до цього, деякі з частин повинні бути рухливими. Це робить апарат, що застосовується дорогим і метод складним. Метою цього винаходу є забезпечення покращення описаної вище методики та попереднього пристрою. Більш конкретно, завданням цього винаходу є створення пристрою контролю для контролю поверхні валка валкової дробарки, який є економічним і менш складним, ніж попередній пристрій. Крім того, завданням цього винаходу є забезпечити для дробарки високого тиску, класифікатора або аналогічного пристрою, використання пристрою контролю, спосіб контролю поверхні валу валкової дробарки, та комп'ютерну програму. Ці та інші цілі, а також переваги, які будуть очевидні з наступного опису даного винаходу, досягаються з допомогою пристрою контролю для контролю поверхні валка валкової дробарки відповідно до незалежних пунктів формули винаходу. Відповідно до першого аспекту, ці та інші цілі досягаються, повністю або принаймні частково з допомогою пристрою контролю для контролю поверхні валка валкової дробарки. Пристрій контролю містить випромінювач світла, виконаний для проектування лінії на поверхню валка, пристрій захоплення зображення для створення зображення ділянки поверхні, причому ділянка, яка щонайменше включає частину проектованої лінії, та блок процесора для обробки зображення, для визначення інформації про поверхню. Пристрій контролю включає в себе обмежену кількість деталей, і тому є менш складним і дорогим, ніж інші пристрої контролю на ринку сьогодні. Також перевагою у порівнянні з попереднім пристроєм є те, що зображення поверхні валка захоплюється щонайменше разом з частиною проектованої лінії. Зображення може бути використано не тільки для визначення відстані між точкою на поверхні валка та точкою відліку, але і для визначення яскравості точки на поверхні валка, кольору точки на поверхні валка, або, навіть, температури точки на поверхні валка. У свою чергу, інформація про поверхню може, наприклад, бути використана для виявлення пошкодження або втрати зносостійкості штифтів, виявлення пошкоджених або відсутніх крайових блоків і/або виявлення пошкоджених або відсутніх фланців, інформацію про поверхню також можна використати для 1 UA 115675 C2 5 10 15 20 25 30 35 40 45 50 55 60 отримання профілю поверхні для визначення зношування. Профіль поверхні включає в себе як поверхню валка, так і будь-які штифти, передбачені на поверхні валка. Випромінювач світла може бути лазерним, і пристроєм захоплення зображення може бути датчик камери. Це кращий варіант здійснення даного винаходу. Лазер та датчик камери точні і прості у використанні. Пристрій захоплення зображення може бути виконано для створення зображення валка, в той час, як вал обертається, причому пристрій захоплення зображення виконано для створення множини зображень поверхні за одне обертання валка. Таким чином, огляд всієї поверхні валка може бути налаштовано, поки валкова дробарка знаходиться у використанні. Пристрій контролю може додатково містити датчик обертання, виконаний з можливістю виявлення обертального положення валка. Коли датчик обертання виявляє обертальне положення валка, блок обробки може бути виконано так, щоб поєднати виміряне обертальне положення із зображенням, створеним з допомогою пристрою захоплення зображення. Таким чином, точна ділянка поверхні валка може бути виділена на зображенні і використана при визначенні інформації про поверхню. Пристрій контролю може додатково містити пам'ять для зберігання попереднього зображення поверхні валка. Попереднє зображення ілюструє поверхню валка до початку роботи. У цей час на поверхні валка встановлено відсутність зносу. Попереднє зображення може, наприклад, ілюструвати поверхню валка, коли валок абсолютно новий, коли валок було відновлено або коли валок було використано протягом дуже короткого періоду після того, як він був повністю новий або відновлений. Блок обробки може бути виконано для збереження множини створених зображень поверхні валка, знятих в різних обертальних положеннях валу, і для формування поточного зображення поверхні валка з допомогою створених зображень. З допомогою поточного зображення, може бути встановлений поточний робочий стан поверхні валу. Обидва зображення: попереднє та поточне, можуть бути оглядом всієї поверхні валка, який встановлюється з допомогою використання множини знімків, зроблених з допомогою пристрою захоплення зображення. Блок обробки може бути виконано для порівняння поточного зображення поверхні вала із попереднім зображенням поверхні вала. Шляхом порівняння поточного зображення поверхні валка із попереднім зображенням поверхні вала, він може бути встановлений, якщо є необхідність ремонту поверхні валка або його частин. Наприклад, відсутній або зношений чи пошкоджений штифт, який потребує заміни, може бути виявлений шляхом зіставлення розрахункових характеристик, отриманих із зображень, знятих через певний час. Величезна кількість різних параметрів може бути використана для того, щоб порівняти зображення, що ілюструє попереднє зображення поверхні валка, і зображення, що ілюструє поточне зображення поверхні валка. Такими параметрами можуть бути, наприклад, встановлені - відстань, яскравість, колір або температура. Таким чином, блок обробки може бути виконаний з можливістю визначення щонайменше одного параметра з групи, що складається зі зміщення першої точки на поверхні валка від точки відліку, яскравості першої точки на поверхні валка, кольору першої точки на поверхні валка, і температури точки на поверхні валка. Зміщенням першої точки від точки відліку може бути висота цієї першої точки над рівнем навкружної поверхні валка. Точкою відліку, як правило, буде точка на зображенні, відповідна рівню навкружної поверхні валка. Таким чином, коли вал абсолютно новий і не був використаний, точкою відліку може бути точка на поверхні валка, в той же час, коли валок був використаний і автогенний шар сформований на поверхні валка між штифтами, точкою відліку може бути точка на поверхні автогенного шару. Відповідно другому аспекту цього винаходу забезпечується дробарка високого тиску. Дробарка високого тиску містить два валки, і принаймні, один пристрій контролю відповідно до вищезазначених функцій. Відповідно до третього аспекту цього винаходу класифікатор забезпечується. Класифікатор містить два валки, і принаймні один пристрій контролю, відповідно до вищезазначених функцій. Кожен валок містить безліч зубців, які під час використання, будуть проходити крізь відповідні зубці протилежного валка класифікатора. Відповідно до четвертого аспекту цього винаходу забезпечується використання пристрою контролю, відповідно до вищезазначених функцій, для визначення зносу поверхні валка валкової дробарки. Пристрій контролю також може бути використаний для того, щоб визначити, відсутність зносу корпуса в локальному місці на поверхні валка валкової дробарки, в якому передбачено наявність зносу корпуса. Відповідно до п'ятого аспекту цього винаходу забезпечується запропонований спосіб контролю поверхні валка валкової дробарки. Спосіб полягає в тому, що проектують лінії світла 2 UA 115675 C2 5 10 15 20 25 30 35 40 45 50 55 60 на поверхню валка, створюють зображення ділянки поверхні, в тому числі ділянки, яка включає щонайменше частину проектованої лінії, обробляють зображення для визначення інформації про поверхню. Спосіб містить тільки кілька кроків і є економічним і простим. Ще однією перевагою способу є те, що захоплюється зображення поверхні валка разом з щонайменше частиною проектованої лінії. Зображення може бути використано не тільки для визначення відстані між точкою на поверхні валка і точкою відліку, але також для визначення яскравості точки на поверхні валка, кольору точки на поверхні валка, або навіть температури точки на поверхні валка. У свою чергу, ця інформація може бути використана для того, щоб визначити інформацію про поверхню валка, наприклад, якщо зносостійкий штифт зношений, має інші дефекти або відсутній, і, таким чином, потребує заміни. Стадія створення зображення ділянки поверхні валка може повторюватися кілька разів, у той час як вал обертається, щоб зафіксувати безліч зображень поверхні валка за один оборот валу. Таким чином, огляд всієї поверхні валка може бути встановлено в той час, як дробарка використовується. Спосіб може додатково містити етапи виявлення обертального положення валка і поєднання виміряного обертального положення зі створеним зображенням частини поверхні. Таким чином, точну ділянку поверхні валка можна виділити на зображенні і використовувати для визначення інформації про поверхню. Спосіб може додатково містити в собі стадію зберігання попереднього зображення поверхні валка. Попереднє зображення ілюструє поверхню вала до початку роботи. У цей час не було встановлено зносу поверхні валка. Як згадувалося вище, попереднє зображення може ілюструвати поверхню валка, коли валок було відремонтовано або після того, як зовсім новий, так і відновлений валок було використано протягом дуже короткого періоду. Спосіб може додатково містити етапи зберігання множини створених зображень поверхні вала, знятих в різних обертальних положеннях валка, і які утворюють поточне зображення поверхні вала, використовуючи зняті зображення. З допомогою поточного зображення, може бути встановлено поточний робочий стан поверхні валка. Спосіб може додатково містити етап, на якому порівнюють поточне зображення поверхні вала із попереднім зображенням поверхні вала. Шляхом порівняння поточного зображення поверхні вала із попереднім зображенням поверхні валка, може бути встановлено, чи є необхідність ремонту поверхні валка. Наприклад, відсутня шпилька або зношена шпилька, що потребує заміни, можуть бути виявлені з допомогою порівняння зображень. Величезна кількість різних параметрів може бути використана для того, щоб порівняти зображення, що ілюструє попереднє зображення поверхні валка, і зображення, що ілюструє поточне зображення поверхні валка. Такими параметрами можуть бути, наприклад, встановлені відстань, яскравість, колір або температура. Таким чином, спосіб може додатково містити стадію визначення щонайменше одного параметра з групи, що складається зі зміщення першої точки на поверхні валка від точки відліку, яскравості першої точки на поверхні валка, кольору першої точки на поверхні валка, температури точки на поверхні валка. Як обговорювалося вище, відхиленням першої точки від точки відліку може бути висота цієї першої точки над рівнем навкружної поверхні валка. Точкою відліку, як правило, буде точка на зображенні, що відповідає рівню навкружної поверхні валка. Таким чином, коли валок повністю новий і невикористаний, точкою відліку може бути точка на поверхні корпусу валка, в той час, коли валок був використаний, і на поверхні корпусу валка сформовано автогенний шар, точкою відліку між зубцями може бути точка на поверхні автогенного шару. Відповідно до шостого аспекту цього винаходу, комп'ютерна програма забезпечується. Комп'ютерна програма містить засіб програмного коду, пристосований для виконання способу, відповідно до вищенаведених функцій, коли програма виконується на комп'ютері або на процесорі. Як правило, всі терміни, які використовуються у формулі винаходу, слід тлумачити відповідно їх звичайному значенню в технічній галузі, якщо явно не визначено інакше. Всі посилання «[елемент, пристрій, компонент, засіб, і т.д.]» повинні бути інтерпретовані відкрито, як посилаються, принаймні, на один приклад вищезазначеного елемента, пристрою, компонента, засобу, і т.д., якщо явно не вказано інше. Етапи будь-якого способу, розкритого тут, не повинні бути виконаними в тому ж порядку, який розкрито, якщо явно не вказано. Як використовується тут, термін "містить" і варіації цього терміна не призначені для виключення інших добавок, компонентів, цілих чисел або стадій. Під терміном "пристрій контролю" вся система контролю мається на увазі. Тобто, пристрій контролю включає в себе щонайменше випромінювач світла, пристрій захоплення зображення і блок процесора. Пристрій контролю може додатково містити датчик обертання і пам'ять. Слід 3 UA 115675 C2 5 10 15 20 25 30 35 40 45 50 55 також зазначити, що частини, включені в пристрій контролю, можуть бути надані в одному унітарному пристрої, або відокремлені один від одного і в різних місцях. Короткий опис креслень Вищевказані, а також додаткові завдання, ознаки та переваги даного винаходу будуть більш зрозумілі за наступними ілюстративними і не обмежуючими докладного опису кращих варіантів втілення даного винаходу з посиланням на наведені креслення, де однакові номери посилань будуть використані для подібних елементів, на яких: Фіг. 1 - вид в перспективі валка валкової дробарки відповідно до раніш відомого рівня техніки, і Фіг. 2 - вид в перспективі валка на Фіг. 1, коли забезпечується пристрій контролю відповідно до одного з варіантів здійснення даного винаходу. Детальний опис кращих варіантів втілення винаходу Фіг. 1 ілюструє валок 1 валкової дробарки (не показано) відповідно до відомого попереднього рівня техніки. Вал 1 має безліч стійких до зносу штифтів 2. Зносостійкі штифти 2, які мають потенціал тривалого терміну служби, навіть під дією високих стискаючих навантажень, мають радіальну внутрішню контактну частину, яку надійно прикріплено до валу або шини вала. Фіг. 2 ілюструє валок 1 з Фіг. 1, коли забезпечується пристрій контролю 3 для контролю поверхні валка 1, відповідно до одного з варіантів здійснення даного винаходу. Пристрій контролю 3 містить випромінювач світла 4 для проектування лінії 5 на поверхню валка 1, пристрій захоплення зображення 6 для створення зображення ділянки поверхні валка 1, ділянки, що включає щонайменше частину проектованої лінії 5, та блок процесора 7 для обробки зображення для визначення інформації про поверхню. Пристрій контролю 3 також має детектор обертання 8 для виявлення обертального положення валка 1 і пам'ять 9 для зберігання попереднього зображення поверхні валка 1. Попереднє зображення ілюструє поверхню валка 1, коли він в неактивному робочому стані. В одному переважному варіанті втілення даного винаходу, пристрій контролю 3 буде працювати наступним чином, коли поверхня валка буде перевірятися. Пристрій захоплення зображення 6 буде створювати зображення валка 1, в той час, як валок 1 обертає один оберт. Одночасно детектор обертання 8 виявить обертальні позиції валка 1. Блок обробки 7 потім пов'язує виявлене обертальне положення валка 1 з кожним знятим зображенням з допомогою пристрою захоплення зображення 6. Зображення поверхні валка 1, зняті в різних обертальних положеннях валка 1, потім будуть сформовані в поточне зображення поверхні валка 1. Поточне зображення буде відображати поточний робочий стан поверхні валка 1. В якості заключного етапу, блок обробки 7 буде порівнювати поточне зображення поверхні валка 1 із попереднім зображенням поверхні валка 1, щоб визначити необхідну інформацію про поверхню валка 1. Інформація про поверхню, наприклад, використовується для виявлення пошкоджених або відсутніх зносостійких штифтів, виявлення пошкоджених або відсутніх крайових блоків, виявлення пошкоджених або відсутніх фланців і/або отримання профілю поверхні, щоб визначити загальний знос валка 1. Більш конкретно, порівняння поточного зображення та попереднього зображення проводиться з допомогою блоку обробки 7, який обчислює відхилення першої точки на поверхні валка від точки відліку в кожному з двох зображень. Якщо зміщення, що вимірюються від двох зображень відрізняються один від одного при порівнянні, поверхня валка 1 має знос. Цей процес може бути повторений до тих пір, поки не буде покрита вся поверхня валка 1. Слід зазначити, що вимірювання відносно діаметра валка 1, а також поверхні валка 1 може бути обчислено у величезній кількості способами, використовуючи зображення. Крім того, інші способи визначити дефекти на поверхні валика 1 можливі, такі як, наприклад, шляхом вивчення геометрії валків 1, з використанням зображень. Коли обидва валки дробарки контролюються, дані, що стосуються двох різних валків, можна порівняти з тим, щоб визначити необхідну інформацію про валкову дробарку. Блок обробки може бути встановлено, щоб генерувати сигнал тривоги, коли попередній відсоток зносу поверхні валка буде виявлено. Коли пристрій контролю використовується для визначення відсутніх штифтів, блок обробки може бути встановлений, щоб генерувати сигнал тривоги, як тільки відсутність або пошкодження одного штифту було виявлено, або коли відсутність або пошкодження наперед заданого числа штифтів було виявлено. Крім того, коли генерується сигнал тривоги, блок обробки може бути виконаний з можливістю давати звуковий сигнал, показувати аварійне повідомлення, або навіть автоматично припинити роботу валкової дробарки. 4 UA 115675 C2 5 10 15 20 25 30 35 40 45 50 55 60 Описаний вище спосіб може бути реалізовано з допомогою комп'ютерної програми, що містить засоби програмного коду, пристосовані для виконання способу, коли програма виконується на комп'ютері або на процесорі. Фахівець в даній галузі розуміє, що можлива кількість модифікацій описаних тут варіантів втілення, що не виходять за межі обсягу винаходу, який визначений в поданій формулі винаходу. Наприклад, аналіз поверхні валка 1 може бути проведено шляхом порівняння яскравості, кольору або температури поточного та попереднього зображень. Яскравість, колір або температура штифтів, як правило, відрізняються від яскравості, кольору або температури корпусу валка, і автогенного шару, створеного подрібненим матеріалом між штифтами. У варіанті втілення винаходу, описаному вище, випромінювачем світла є лазер. Тим не менш, також можуть бути використані інші джерела світла, що випромінюють інші типи світла. Наприклад, випромінювач світла випромінює світло, яке не видно неозброєним оком, тобто інфрачервоне або ультрафіолетове світло, може випромінюватися за умови, що пристрій захоплення зображення є чутливим до такого конкретного світла. Детектором обертання може бути, наприклад, кодуючий пристрій, але також може бути засіб, виконаний для вимірювання або введення швидкості обертання валка і поєднання цього з розташуванням точки відліку на валку. Попереднє зображення поверхні валка може бути створено шляхом введення координат штифтів, присутніх в невикористаному валку, в блок обробки, тим самим створюючи карту поверхні валка. Також можливо створити попереднє зображення поверхні валка шляхом створення зображення поверхні валка при обертанні валка, і формувати карту поверхні валка, по суті таким же чином, як формується і поточне зображення поверхні валка. Також можливо об'єднати ці підходи, таким чином, що зняті зображення невикористаної поверхні валка та поєднані в зображення всієї поверхні валка, і в такому зображенні маркуються штифти шляхом введення координат штифтів в блок обробки. Таким чином, системою можна буде розпізнавати штифти на зображенні. Лінію можна проектувати на поверхню валка з різних позицій і в різних напрямках, не обов'язково паралельно поздовжній осі валка. Лінія, що проектується на поверхню валка від випромінювача світла, не обов'язково повинна бути у вигляді прямої лінії. Для того, щоб проаналізувати зображення, лінія повинна бути визначена для кожного зображення. Пристрій контролю може бути використаний для контролю фактичної поверхні валка, а також поверхневих елементів, прикріплених до поверхні валка, наприклад, шпильки, штифти, зубці, приварені кульки або інші елементи. Пристрій контролю також може містити в собі безліч світло-випромінюючих пристроїв або один світло-випромінюючий пристрій, які проектують безліч ліній, або тому подібне, на поверхню валка. Якщо більш ніж одна лінія проектується, то світло, яке вони проектують відповідними лініями, може бути однакової або різної довжини хвилі. ФОРМУЛА ВИНАХОДУ 1. Валкова дробарка, що має два валки (1) та щонайменше один пристрій (3) контролю для контролю поверхні валка (1) валкової дробарки, яка містить: випромінювач (4) світла для проектування лінії (5) на поверхню валка (1), пристрій (6) захоплення зображення для захоплення зображення ділянки поверхні, причому ділянка включає принаймні частину проектованої лінії (5), і процесорний блок (7) для обробки зображення для визначення інформації про цю поверхню. 2. Валкова дробарка за п. 1, в якому випромінювачем (4) світла є лазер. 3. Валкова дробарка за п. 1 або п. 2, в якій пристрій (6) захоплення зображення є датчиком камери. 4. Валкова дробарка за будь-яким з попередніх пунктів, в якій інформацією про поверхню користуються для виявлення пошкоджених або відсутніх зносостійких штифтів, виявлення пошкоджених або відсутніх крайових блоків та/або виявлення пошкоджених або відсутніх фланців. 5. Валкова дробарка за будь-яким з попередніх пунктів, в якій інформацією про поверхню користуються для отримання профілю поверхні для визначення зносу. 6. Валкова дробарка за будь-яким з попередніх пунктів, в якій пристрій (6) захоплення зображення виконано для створення зображення валка (1), в той час як валок (1) обертається, причому пристрій (6) захоплення зображення виконано для зняття множини зображень поверхні за одне обертання валка (1). 5 UA 115675 C2 5 10 15 20 25 30 7. Валкова дробарка за п. 5, яка містить детектор (8) обертання для виявлення положення обертання валка (1). 8. Валкова дробарка за п. 6, в якій блок (7) обробки виконано для пов'язування виявленого обертального положення із зображенням, створеним з допомогою пристрою (6) захоплення зображення. 9. Валкова дробарка за п. 6 або п. 7, яка містить пам'ять (9) для зберігання попереднього зображення поверхні валка. 10. Валкова дробарка за п. 8, в якій блок (7) обробки виконано для збереження множини зображень поверхні валка, знятих в різних обертальних положеннях валка (1), і для формування поточного зображення поверхні валка з допомогою знятих зображень. 11. Валкова дробарка за п. 9, в якій блок (7) обробки виконано для порівняння поточного зображення поверхні валка з попереднім зображенням поверхні валка. 12. Валкова дробарка за будь-яким з попередніх пунктів, в якій блок (7) обробки виконано для визначення щонайменше одного параметра з групи, що складається зі зміщення першої точки на поверхні валка від точки відліку, яскравості першої точки на поверхні валка, кольору першої точки на поверхні валка і температури точки на поверхні валка. 13. Валкова дробарка за будь-яким з попередніх пунктів, яка є валковою дробаркою високого тиску. 14. Валкова дробарка за будь-яким з пп. 1-12, яка є класифікатором. 15. Застосування валкової дробарки за будь-яким з пп. 1-14 для визначення зносу поверхні валка (1) валкової дробарки. 16. Застосування валкової дробарки за будь-яким з пп. 1-14 для визначення відсутності зносу корпуса в локальному місці на поверхні валка (1) валкової дробарки, в якому наявність зносу корпуса передбачено. 17. Спосіб контролю валкової дробарки за будь-яким з пп. 1-14, який полягає в тому, що проектують лінії світла на поверхню валка валкової дробарки, створюють зображення ділянки поверхні, яка включає щонайменше частину проектованої лінії, обробляють зображення для визначення інформації про поверхню. 18. Машинозчитуваний носій інформації, що містить програмний код, який призначений для визначення зносу поверхні валка валкової дробарки і сконфігурований для виконання процесором операцій способу за п. 17. 6 UA 115675 C2 Комп’ютерна верстка В. Мацело Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюMonitoring device for a roller crusher
Автори англійськоюWebster, Alexander
Автори російськоюВэбстэр Александэр
МПК / Мітки
МПК: B02C 4/00, G01B 11/25, B02C 4/28
Мітки: валкової, пристрій, контролю, дробарки
Код посилання
<a href="https://ua.patents.su/9-115675-pristrijj-kontrolyu-dlya-valkovo-drobarki.html" target="_blank" rel="follow" title="База патентів України">Пристрій контролю для валкової дробарки</a>
Валок валкової дробарки

Номер патенту: 90397
Опубліковано: 26.05.2014
Автор: Мікульонок Ігор Олегович
МПК: B02C 4/30
Мітки: валкової, дробарки, валок
Формула / Реферат:
1. Валок валкової дробарки, виконаний у вигляді прямої призми, який відрізняється тим, що призму виконано правильною.2. Валок за п. 1, який відрізняється тим, що бокові грані призми споряджено знімними броньовими плитами.
Пилозахисний кожух для валкової дробарки високого тиску
Номер патенту: 114812
Опубліковано: 10.08.2017
Автор: Резніченко Вадім
Мітки: пилозахисний, кожух, високого, дробарки, тиску, валкової
Формула / Реферат:
1. Валкова дробарка, яка маєпару подрібнювальних валків, що взагалі паралельні один одному і обертаються в протилежних напрямках, причому кожен валок має кінцеві частини, встановлені у відповідних роликових підшипниках, іпристрій подачі матеріалу для подрібнення до зони подрібнення валкової дробарки, а такожяка має пилозахисний кожух, що охоплює зону подрібнення, причому цей пилозахисний кожух має вхідний отвір вище зони...
Валкова дробарка і спосіб захисту валкової дробарки від неподрібнюваних предметів

Номер патенту: 115660
Опубліковано: 11.12.2017
Автори: Резніченко Вадім, Гарболд Кіт
МПК: B02C 4/32, B02C 23/04
Мітки: спосіб, неподрібнюваних, захисту, дробарки, предметів, валкова, дробарка, валкової
Формула / Реферат:
1. Спосіб захисту валкової дробарки (1) від неподрібнюваних предметів, яка має два по суті паралельні валки (2), виконані з можливістю обертання в протилежних напрямках і розділені зазором (3), який полягає у:виявленні неподрібнюваного предмета (Т) в потоці завантажуваного матеріалу (М) у валкову дробарку (1),збільшенні зазору (3) між валками (2) до пропускного розміру, який значно більше, ніж робочий розмір зазору, так щоб...
Підшипниковий вузол для валкової дробарки

Номер патенту: 103773
Опубліковано: 25.11.2013
Автори: Барсевісіус Паулу, Ніклевскі Анджей
МПК: F16C 35/00, F16C 13/00, B02C 4/02, B02C 4/28, B02C 4/08
Мітки: вузол, підшипниковий, дробарки, валкової
Формула / Реферат:
1. Підшипниковий вузол для валкової дробарки такого типу, що містить пару дробильних валків (R), які по суті паралельні один одному і обертаються в протилежних напрямках, при цьому кожний валок (R) включає в себе: вісь (10), яка має кінцеві частини (11), встановлені у відповідних підшипниках (30) кочення, кожний з яких утримується у внутрішній частині корпусу (40) підшипника, змонтованого на основі (S) дробарки, і середню частину (12)...
Валок валкової дробарки

Номер патенту: 11787
Опубліковано: 25.12.1996
Автори: Лагода Володимир Дмитрович, Фішман Йосип Давидович, Лаєвський Фелікс Леонідович, Пахно Віктор Петрович
МПК: B02C 4/30
Мітки: дробарки, валкової, валок
Формула / Реферат:
1. Валок валковой дробилки, содержащий вал, барабаны и зафиксированные по их краям с помощью болтовых соединений дробящие сегменты, отличающийся тем, что, с целью повышения надежности и ремонтопригодности валка, он снабжен в местах болтовых соединений П-образными скобами, причем барабаны и дробящие сегменты выполнены с торцовыми смежными пазами и с переходящими в последние пазами на рабочей поверхности дробящих сегментов, а П-образные...
Попередній патент: Шоколад
Наступний патент: Спосіб одержання органічного добрива і органічне добриво біопрофіт, одержане цим способом
Випадковий патент: Автомат пакування сипких продуктів у готові пакети