Автоматизована система безпілотного проміру
Номер патенту: 119705
Опубліковано: 10.10.2017
Автори: Мамонтова Людмила Степанівна, Бурачек Всеволод Германович, Сталінська Юлія Олександрівна, Крельштейн Петро Давидович

Формула / Реферат
1. Система автоматизованого безпілотного проміру, що містить GPS-приймач, ехолот, гірокомпас, датчик оборотів гребного гвинта, блок виміру швидкості промірного судна (лаг або акустичний лаг), електронні блоки управління, обробки та зберігання інформації, передачі радіосигналів, яка відрізняється тим, що блок виміру швидкості судна (лаг) містить дві чуттєві осі: повздовжню, встановлену паралельно діаметральній площині судна в його підводній частині, і траверзну, зорієнтовану перпендикулярно діаметральній площині судна, при цьому електричні виходи з виміряними даними GPS-приймача, ехолота, гірокомпаса, гребного гвинта (через блок управлянні судовою машиною) та виходи з сигналами вимірювань за двома осями лага пов'язані відповідними входами блока обробки інформації; характеристика вектора течії пов'язана з результатами вимірювання виразом:
- для азимуту напрямку течії (вектора ![]() )
) ![]() ;
;
- для швидкості течії: ![]() ,
,
де ![]() - курс судна;
- курс судна;
![]() - кут між напрямком векторів курсу
- кут між напрямком векторів курсу ![]() та течії
та течії ![]() ;
;
![]()
де ![]() - складова зносу за лінією траверзу до курсу;
- складова зносу за лінією траверзу до курсу;
![]() - складова зносу за лінією курсу.
- складова зносу за лінією курсу.
2. Система за п. 1, яка відрізняється тим, що блок лага містить n-ідентичних двоосьових лагів, повздовжні осі якого встановлені паралельно діаметральній площині судна, при цьому лаги жорстко закріплені на вертикальній штанзі, подібній до фальшкіля на різних рівнях (глибинах), і оснащені блоком комутації для зв'язку ультразвукових приймачів лагів з блоком обробки інформації.
Текст
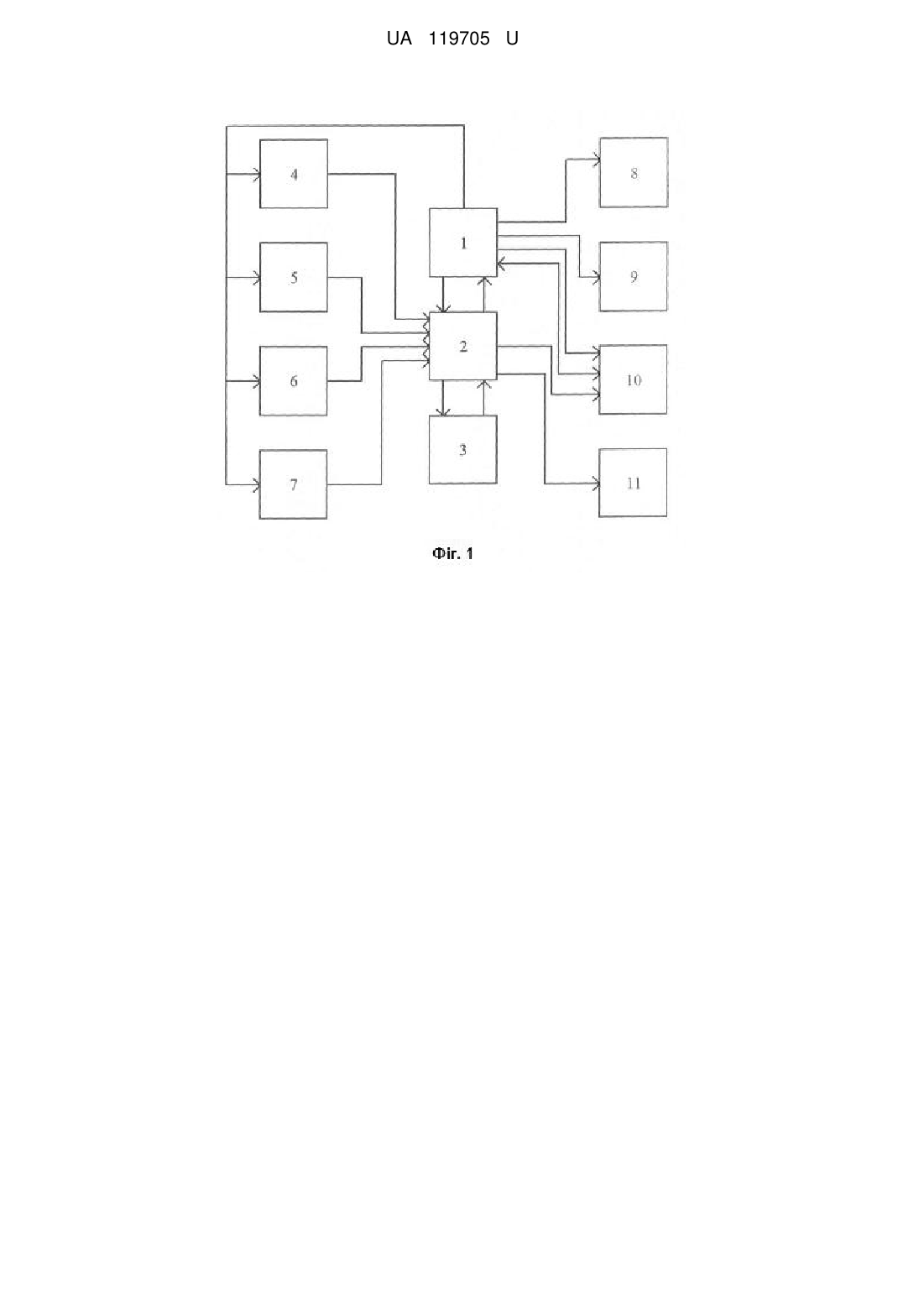
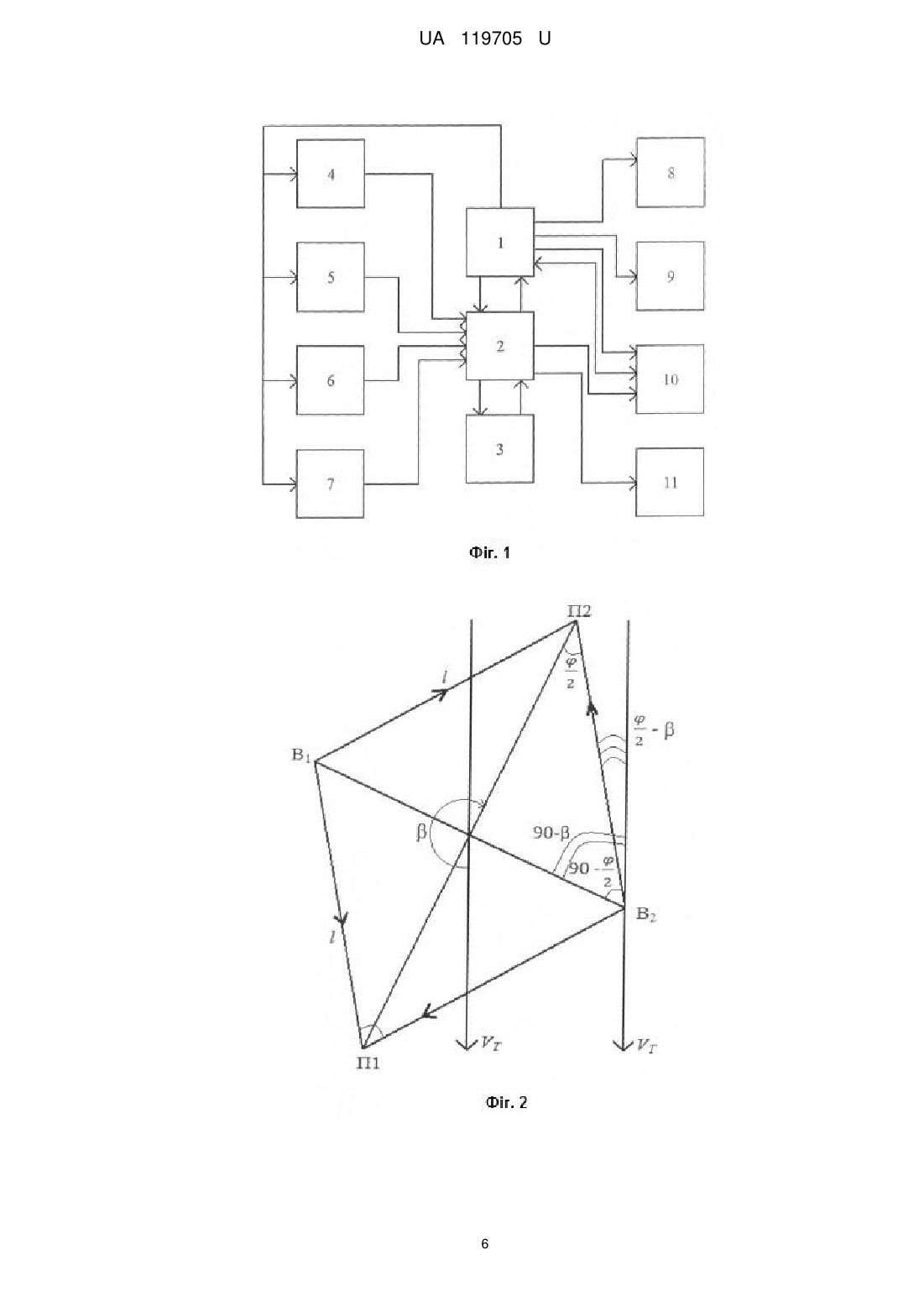
Реферат: Система автоматизованого безпілотного проміру містить GPS-приймач, ехолот, гірокомпас, датчик оборотів гребного гвинта, блок виміру швидкості промірного судна (лаг або акустичний лаг), електронні блоки управління, обробки та зберігання інформації, передачі радіосигналів. Крім цього, блок виміру швидкості судна (лаг) містить дві чуттєві осі: повздовжню, встановлену паралельно діаметральній площині судна в його підводній частині, і траверзну, зорієнтовану перпендикулярно діаметральній площині судна, при цьому електричні виходи з виміряними даними GPS-приймача, ехолота, гірокомпаса, гребного гвинта (через блок управлянні судовою машиною) та виходи з сигналами вимірювань за двома осями лага пов'язані відповідними входами блока обробки інформації; характеристика вектора течії пов'язана з результатами вимірювання виразом: - для азимуту напрямку течії (вектора VT ) A T K T ; - для швидкості течії: VT 2 K 2 VC V ' C , де K - курс судна; T - кут між напрямком векторів курсу VK та течії VT ; tgT ' VC K VC , ' де VC - складова зносу за лінією траверзу до курсу; K VC - складова зносу за лінією курсу. UA 119705 U (12) UA 119705 U UA 119705 U 5 10 15 20 25 30 35 Запропонована корисна модель належить до галузі дистанційного зондування Землі (ДЗЗ), зокрема до ДЗЗ водних об'єктів. Відома система безпілотного проміру [1], що базується на схемі реалізації способу комбінування ехолокації глибин водного об'єкта з GPS-визначенням координат промірного судна та дистанційним управлінням з центральної станції по радіоканалу [2]. Відомі електромеханічні датчики швидкості течії водяного потоку виконані у вигляді підводного вимірюючого блока, що підвішений на тросі з борта судна [3, 4, 5]. Відомі акустичні датчики швидкості течії [6, 7], котрі також застосовують при статичному положенні судна. В обох випадках напрямок течії визначають на око. Відомі навігаційні акустичні лаги для вимірювання швидкості руху судна, при цьому відмітимо, що вони не чутливі до швидкості течії водяного потоку [8]. Таким чином, способи і засоби досліджень водних об'єктів містять достатньо високий ступінь автоматизації вимірювань глибин та визначення координат промірних вертикалей, але вимірювання вектора течії водного потоку при цьому виконують як окреме дослідження спеціальними приладами, в основному, закріплюючи такий прилад та фіксуючи глибину за допомогою троса, що знижує ефективність досліджень у цілому. Дана ситуація не дозволяє забезпечити вимірювання вектора течії безпосередньо в процесі промірних робіт, маючи, наприклад, вбудовану систему вимірювання вектора течії та підвищити рівень комплексності досліджень. Задачею корисної моделі є підвищення рівня комплексності промірних робіт, пошук способу комплексування різноманітних досліджень, що забезпечують можливість їх виконання в автоматизованому режимі на промірному судні під час руху його по лінії промірного галсу. Поставлена задача вирішується за рахунок створення системи автоматизованого безпілотного проміру, що містить GPS-приймач, ехолот, гірокомпас, датчик оборотів гребного гвинта, блок виміру швидкості промірного судна (лаг або акустичний лаг), електронні блоки управління, обробки та зберігання інформації, передачі радіосигналів, які відрізняються тим, що блок виміру швидкості судна (лаг) містить дві чуттєві осі: повздовжню, встановлену паралельно діаметральній площині судна в його підводній частині, і траверзну, зорієнтовану перпендикулярно діаметральній площині судна. При цьому електричні виходи з виміряними даними GPS-приймача, ехолота, гірокомпаса, гребного гвинта (через блок управлянні судовою машиною) та виходи з сигналами вимірювань за двома осями лага пов'язані відповідними входами блока обробки інформації; характеристика вектора течії пов'язана з результатами вимірювання виразом: - для азимуту напрямку течії (вектора VT ) A T K T ; 2 K 2 - для швидкості течії: VT VC V'C , де K - курс судна; T - кут між напрямком векторів курсу VK та течії VT ; tgT 40 45 50 55 ' VC K VC ' де VC - складова зносу за лінією траверзу до курсу; K VC - складова зносу за лінією курсу. Система за п. 1, яка відрізняється тим, що блок лага містить п-ідентичних двоосьових лагів, повздовжні осі якого встановлені паралельно діаметральній площині судна, при цьому лаги жорстко закріплені на вертикальній штанзі, подібній до фальшкіля на різних рівнях (глибинах), і оснащені блоком комутації для зв'язку ультразвукових приймачів лагів з блоком обробки інформації. Як аналог, прийнятий за прототип, пропонується система [1], котра має спільні ознаки з запропонованою в частині ехолотування глубин та GPS-вимірювань. Технічним результатом є можливість комплексування гідрометричних досліджень водойм, підвищення точності вимірювань за рахунок рівня автоматизації системи проміру. На фіг. 1 показана схема автоматизованої безпілотної промірної системи. Основні блоки системи: 1 - блок управління; 2 - блок обробки інформації; 3 - програмний блок; 1 UA 119705 U 5 10 15 4-GPS-приймач; 5 - гірокомпас; 6 - ехолот; 7 - лаг-блок; 8 - система рульового управління; 9 - блок управління судовою машиною; 10 - блок прийому-передачі радіосигналів; 11 - блок зберігання інформації. Всі блоки розміщені на промірному судні. Блок 5 включає в себе гірокомпас та інші дистанційні засоби, що забезпечують безпеку мореплавання. Блок 7, лаг-блок, що схематично зображений на фіг. 2, може містить декілька вимірювачів напрямку та швидкості зустрічного водного потоку, виконаних в компактному варіанті та закріплених на вертикальній штанзі на зразок фальшкіля на різних рівнях (глибинах); На фіг. 2 позначимо: - B1B2 - випромінювачі; - П1П2 - приймачі; - Vr - вектор напряму течії; - - кут між повздовжньою віссю приладу і вектором течії; 20 25 - - гострий кут між повздовжньою віссю приладу і траєкторією акустичного імпульсу; 2 - l - відстань між випромінювачем і приймачем; - S - модуль вектору імпульсу; - S - спотворення різниці відстаней S між випромінювачем Bi і приймачем Пj під впливом течії. Очевидно, що різниці S будуть рівні: S l cos або 2 S11 l cos ; S12 l cos ; , , 2 2 30 S2,1 l cos ; S 2,2 l cos (1) 2 2 Розглянемо два режими роботи системи: - при одночасному вмиканні випромінювачів B 2 і B1 на приймачах П1 і П2 одержимо різниці виміряних відстаней ( 1 ): 1 S1,1 S 2,1 S1,2 S 2,2 2l sin 35 40 sin ; 2 на приймачі П1 ; при послідовному вмиканні випромінювачів B 2 і B1 одержимо на приймачах П1 і П2 суму різниць : 2 S1,1 S 2,1 S1,2 S 2,2 2l cos cos . 2 Відношення 1 до 2 буде дорівнювати: 1 tg tg . 2 2 Звідси: tg 1 ctg . 2 2 Таким чином, знявши з приймачів різниці l і c , одержимо значення кута , тобто напрям течії відносно повздовжньої осі лагу. Різниці l і c дають змогу обчислити значення швидкості течії. Таким чином, знявши з приймачів П1 і П2 суми різниць фаз l і c , одержимо значення кута , тобто напрям течії. А значення l і c дають змогу обчислити значення швидкості течії, бо l це сума різниць фаз 2 UA 119705 U 5 ультразвукових імпульсів, що надходять до приймачів при одночасному вмиканні випромінювачів. Виразимо цю суму через різницю довжин хвиль: C V C V f2 C V f1C V f1 f2 f1f2 Де: f1 , f2 - частоти імпульсів, що реєструються приймачами П1 і П2 відповідно, a f0 номінальна частота. Приймаючи f1 f0 f f1 f0 f після деяких перетворень одержимо: 2 2 f f f0 C V f0 C V 2f V fC , або 2 2 0 2 f f 2 f f0 f0 f0 2 2 4 2V fC . 2 f0 f0 Звідки: 1 1 f . V f0 C 2 2 f0 Відзначимо, що в залежності від природи походження водного об'єкта, наявності підземних джерел та протоків, особливостей рельєфу об'єкта формується динаміка руху місцевих водних потоків на різних глибинах та по різноманітних напрямках. Вельми ефективним (в першому наближенні) для дослідження вказаної динаміки водного середовища об'єкта (з порівняно невеликою глибиною) може бути застосування фальшкіля промірного судна, забезпеченого блоком двокоординатних лагів, рознесених на різних глибинах. Система функціонує наступним чином. На фіг. 1 зображена блок - схема системи. Попередньо в програмний блок вводять навігаційну карту та програму проміру водойми, в якій задають галси проміру, рівень точності промірних робіт та інші необхідні умови та характеристики за методикою промірів промірним судном (ПС), виходять на початкову точку галсу, контролюючи положення ПС через блок 1 за даними блока 4. Потім блок 1 включає всі блоки промірної системи. Дані вимірювань з блоків 4 (GPS-координати точок проміру в момент проміру глибин), 5 (курсовий кут шляху), 6 (значення глибин) та 7 (складові швидкості течії за лаг-блоком). Блок направляє управляючі сигнали в блок 8 та 9, задаючи курс ПС і число оборотів гребного гвинта. В блоці 2 за командами блока 1 виконують обробки отриманих даних та всі основні обчислення: уточнених GPS-координат промірних вертикалей, глибини, швидкостей течії водного потоку в різних точках водного об'єкта з диференціюванням складових вектора швидкості течії і з урахуванням впливу швидкості ПС, напрямку та швидкості зносу ПС. За цими даними з блока 2 формуються цифрова 3D-модель водного об'єкта та направляється в блок запису та збереження інформації і за командою блока 1 - в блок 3 для передачі отриманих результатів на центральну управляючу станцію. Методика визначення напрямку і швидкості течії водного потоку за допомогою промірного комплексу. Розглянемо схему руху промірного судна на галсі при впливі зовнішніх факторів: вітру, що викликає дрейф судна і течії води, що викликає знос. На фіг. 3 зображено: - точка O - положення судна на лінії курса O та на лінії промірного галса OQ ; - K - курс промірного судна - азимут лінії O ; - - кут між прямою O та OQ (курсовий кут напряму лінії шляху); - acbd - контур ультразвукових променів двокоординатного лага, що встановлено на підводній частині судна за напрямком діаметральної площини. Під час проміру в точках промірних вертикалей на лінії заданого галсу визначають одночасно з вимірами глибини швидкість руху судна за вимірами GPS-приймача та навігаційного двокоординатного акустичного лаг-блока. На фіг. 2 зображено схему прямокутного трикутника складових векторів швидкості: 10 15 20 25 30 35 40 45 V ш - отримано при вимірах координат судна GPS-приймачем на лінії фактичного шляху (промірного галса); V к - отримано при вимірах лаг-блоком за курсом ПС; 3 UA 119705 U V ' - отримано шляхом розрахунку катета Q побудованого трикутника швидкостей OQ . ' ' Зауважимо, що складова швидкості V' VD VC визначається перпендикулярно лінії шляху від цієї лінії до перетину лінії курса судна та лінії катета: ' - VD - складова швидкості дрейфа; 5 ' - VC - складова швидкості сносу. Очевидно, що проекція швидкості Vш на лінію курсу дає сумарну складову швидкості по лінії курсу V ш cos . Довжини векторів швидкостей Vш і V к містять складові: - за лінією шляху: 10 ш ш ш V ш VM VD VC , Де: ш VM - складова швидкості у спокійній воді (за відсутності вітра та течії); ш VD - складова швидкості, що виникла через вплив дрейфа судна; 15 ш VC - складова швидкості, що виникла через вплив течії; - за лінією курсу: к к V к VM VD . к VM - складова швидкості у спокійній воді; к VD - складова швидкості, що виникла через вплив дрейфа судна. K Очевидно, що складову швидкості VC (залежну від течії) ми можемо знайти з виразу: 20 K VC V ш cos V K к ' Складова швидкості VD за лінією курса має складову на лінії траверзу судна VD , виміряну за допомогою двокоординатного лагу (канал cd), залежну від швидкості і напряму вітру. к Слід враховувати, що вектор швидкості VM не має складової на траверзі лінії курса (за к напрямком осі cd лага), тоді як вектор VD за будь-яких напрямках вітру, окрім того, що 25 ' співпадає з лінією курса, має складову зносу VD , за напрямком траверзу судна (на осі cd лага acbd). ' Проведемо лінію, що паралельна лінії курса, від кінця вектора VD та отримаємо при 30 ' перетині цієї лінією катета Q трикутника OQ величину складової швидкості VD на лінії катета. Тоді складова швидкості зносу за напрямком катета Q буде дорівнювати: ' ' VC V ' VD Швидкість течії VT і азимут напрямку течії A T водного потоку отримують з виразів: 2 K 2 VT VC V'C , A T K T ; де: T - кут між напрямком векторів курсу V k та течії VT ; 35 40 V' T tg c ; к VC Таким чином, запропонована система дозволяє органічно включити в технологію промірних робіт визначення швидкості та напрямку течії водних потоків на акваторії водойми, при цьому за рахунок комплексного підходу суттєво підвищується ефективність досліджень водних об'єктів. Джерела інформації: 1. Пат. 82811 Україна, МПК (2006) G01S 15/00. Система безпілотного проміру / В.Г. Бурачек, Л.С. Мамонтова, С.І. Слабак; заявник та патентовласник Чернігівський державний інститут економіки і управління. № а200708032; заявл.16.07.2007; опубл. 12.05.2008. Бюл.№9. 4 UA 119705 U 5 10 2. Пат. 82812 Україна, МПК (2006) G01S 15/00. Спосіб виконання промірних робіт / В.Г. Бурачек, Л.С. Мамонтова, С.І. Слабак; заявник та патентовласник Чернігівський державний інститут економіки і управління. - № а200708032; заявл. 16.07.2007; опубл. 12.05.2008. Бюл.№9. 3. Быков В.Д. Гидрометрия / В.Д. Быков, А.В. Васильєв. - Л.: Гидрометеоизат, 1965. - 500 с. 4. Железняков Г.В. Гидрология и гидрометрия / Г.В. Железняков - М.: Высшая школа, 1981. 263 с. 5. Клименко Д.Е. Розвитие гидрометрических вертушок в России и за рубежом / Е.Д. Клименко // Географический весник. - 2010. - №2(13). - С. 12-24. 6. Федоров Н.Н. Методы изучения гидрологического режима водных объектов / Н.Н. Федоров - Л.: Гидрометеоиздат, 1982. - 392 с. 7. Цивин М.Н. Гидрометрия: теория и практика измерения скорости течения воды в открытых каналах. / М.Н. Цивин, П.И. Абраменко - К., ИГиМ, 2003. - 109 с. 8. Лукомский Ю.А. Навигация и управления движением судов / Ю.А. Лукомский, В.Г. Пешехонов, Д.А. Скороходов. - СПб.: Элмор, 2002. - 179 с. 15 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 1. Система автоматизованого безпілотного проміру, що містить GPS-приймач, ехолот, гірокомпас, датчик оборотів гребного гвинта, блок виміру швидкості промірного судна (лаг або акустичний лаг), електронні блоки управління, обробки та зберігання інформації, передачі радіосигналів, яка відрізняється тим, що блок виміру швидкості судна (лаг) містить дві чуттєві осі: повздовжню, встановлену паралельно діаметральній площині судна в його підводній частині, і траверзну, зорієнтовану перпендикулярно діаметральній площині судна, при цьому електричні виходи з виміряними даними GPS-приймача, ехолота, гірокомпаса, гребного гвинта (через блок управлянні судовою машиною) та виходи з сигналами вимірювань за двома осями лага пов'язані відповідними входами блока обробки інформації; характеристика вектора течії пов'язана з результатами вимірювання виразом: - для азимуту напрямку течії (вектора VT ) A T K T ; - для швидкості течії: VT 30 2 K 2 VC V ' C , де K - курс судна; T - кут між напрямком векторів курсу VK та течії VT ; tgT ' VC K VC , ' де VC - складова зносу за лінією траверзу до курсу; 35 K VC - складова зносу за лінією курсу. 2. Система за п. 1, яка відрізняється тим, що блок лага містить n-ідентичних двоосьових лагів, повздовжні осі якого встановлені паралельно діаметральній площині судна, при цьому лаги жорстко закріплені на вертикальній штанзі, подібній до фальшкіля на різних рівнях (глибинах), і оснащені блоком комутації для зв'язку ультразвукових приймачів лагів з блоком обробки інформації. 5 UA 119705 U 6 UA 119705 U Комп’ютерна верстка Л. Ціхановська Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 15/42, G01C 7/04, G05B 19/418
Мітки: система, проміру, безпілотного, автоматизована
Код посилання
<a href="https://ua.patents.su/9-119705-avtomatizovana-sistema-bezpilotnogo-promiru.html" target="_blank" rel="follow" title="База патентів України">Автоматизована система безпілотного проміру</a>
Система безпілотного проміру
Номер патенту: 82811
Опубліковано: 12.05.2008
Автори: Бурачек Всеволод Германович, Мамонтова Людмила Степанівна, Слабак Сергій Ігорович
МПК: G01C 11/00, G01S 15/00
Мітки: система, проміру, безпілотного
Формула / Реферат:
Система безпілотного проміру, що містить керуючу центральну станцію (ЦС), диференціальну станцію GPS центральної станції, промірні судна (ПС), блоки керування, датчики водомірних постів, датчики зовнішніх умов, блоки запису і зберігання інформації, яка відрізняється тим, що в системі безпілотного проміру застосований механізм дистанційного радіокерування промірними суднами, а також система включає приймально-передавальні радіоблоки ЦС на...
Система безпілотного проміру
Номер патенту: 28776
Опубліковано: 25.12.2007
Автори: Слабак Сергій Ігорович, Мамонтова Людмила Степанівна, Бурачек Всеволод Германович
МПК: G01C 11/00, G01S 15/00
Мітки: система, проміру, безпілотного
Формула / Реферат:
Система безпілотного проміру, що містить керуючу центральну станцію (ЦС), диференціальну станцію GPS центральної станції, промірні судна (ПС), блоки керування, датчики водомірних постів, датчики зовнішніх умов, блоки запису і зберігання інформації, яка відрізняється тим, що в системі безпілотного проміру застосований механізм дистанційного радіокерування промірними суднами, що включає в себе приймально-передавальні радіоблоки ЦС і на кожному...
Система орієнтації малогабаритного безпілотного літального апарата
Номер патенту: 117923
Опубліковано: 10.07.2017
Автори: Жежера Іван Володимирович, Сільченко Вікторія Романівна, Фірсов Сергій Миколайович
МПК: G01C 23/00, G01C 21/30
Мітки: малогабаритного, літального, система, апарата, орієнтації, безпілотного
Формула / Реферат:
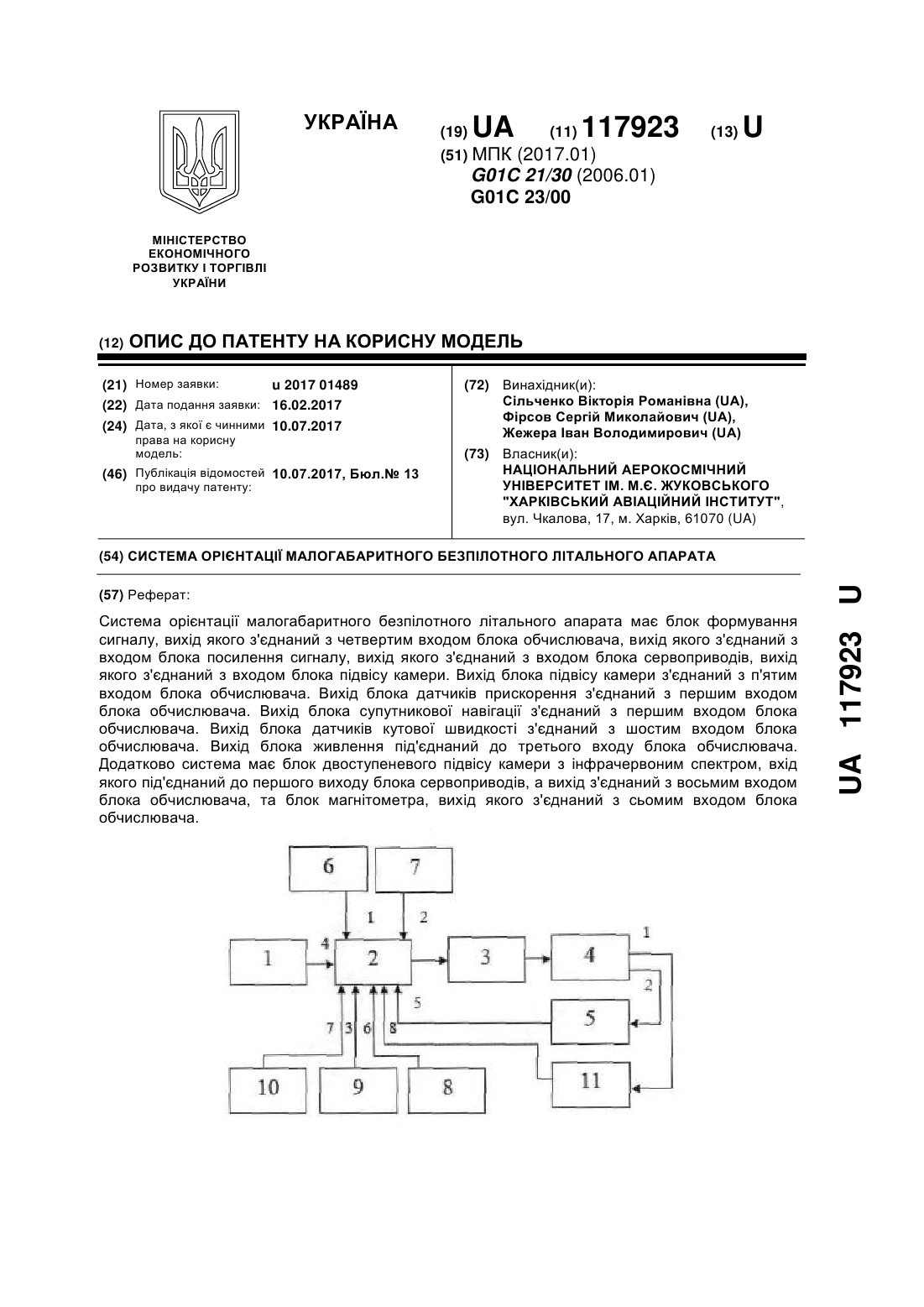
Система орієнтації малогабаритного безпілотного літального апарата, яка містить блок формування сигналу, вихід якого з'єднаний з четвертим входом блока обчислювача, вихід якого з'єднаний з входом блока посилення сигналу, вихід якого з'єднаний з входом блока сервоприводів, вихід якого з'єднаний з входом блока підвісу камери, вихід блока підвісу камери з'єднаний з п'ятим входом блока обчислювача, вихід блока датчиків прискорення з'єднаний з...
Система орієнтації малогабаритного безпілотного літального апарата
Номер патенту: 102894
Опубліковано: 25.11.2015
Автори: Жежера Іван Володимирович, Фірсов Сергій Миколайович, Будіба Уіссам
МПК: G01C 23/00
Мітки: безпілотного, орієнтації, літального, система, малогабаритного, апарата
Формула / Реферат:
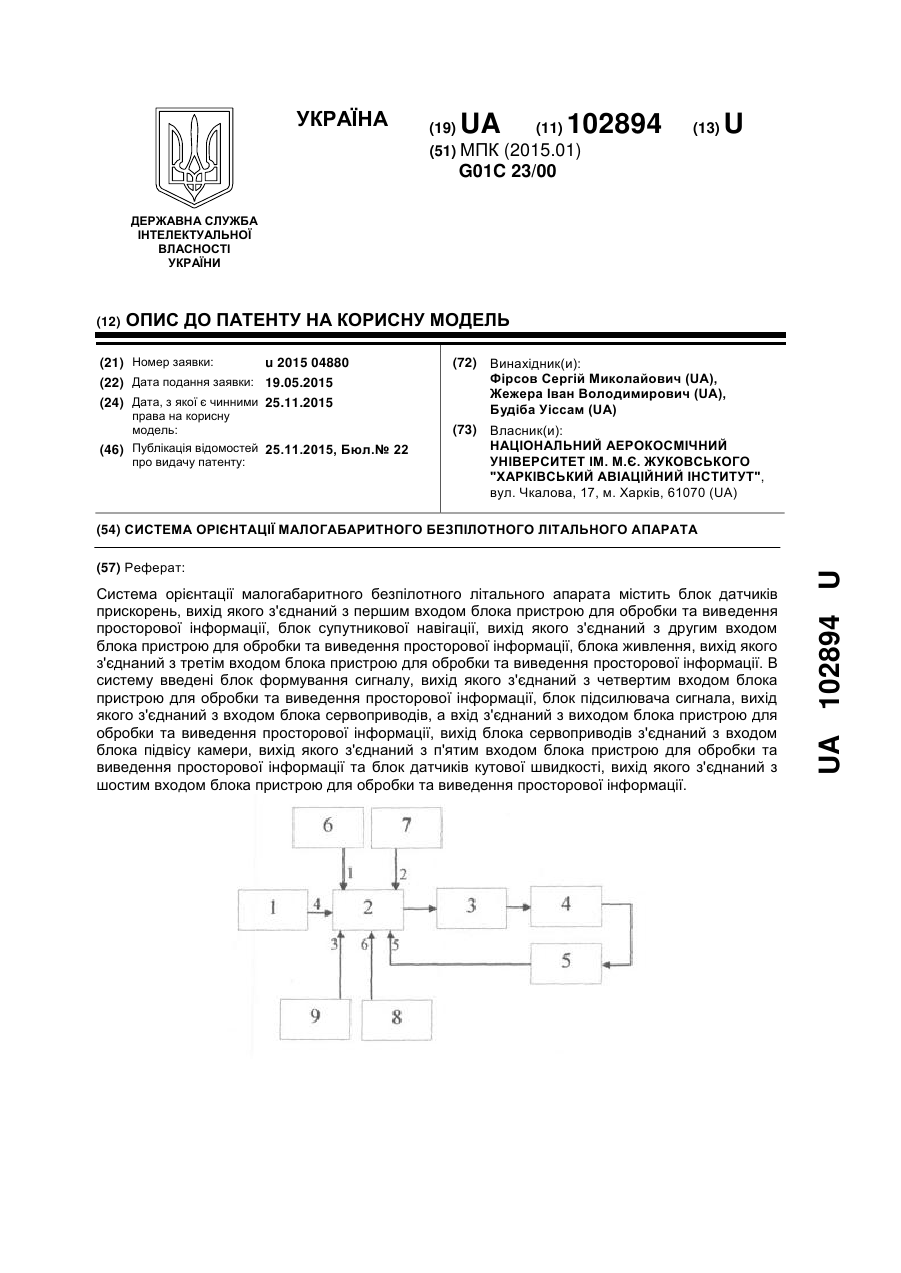
Система орієнтації малогабаритного безпілотного літального апарата, яка містить блок датчиків прискорень, вихід якого з'єднаний з першим входом блока пристрою для обробки та виведення просторової інформації, блок супутникової навігації, вихід якого з'єднаний з другим входом блока пристрою для обробки та виведення просторової інформації, блока живлення, вихід якого з'єднаний з третім входом блока пристрою для обробки та виведення просторової...
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Симонов Володимир Федорович, Величко Надія Вікторівна, Бандура Іван Миколайович
МПК: B64C 13/00, G05D 1/03
Мітки: стабілізації, система, літального, безпілотного, апарата
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Попередній патент: Нетрадиційна підйомно-транспортна машина
Наступний патент: Мікрохвильова система широкосмугового безпроводового доступу umds-ace
Випадковий патент: Пристрій для визначення вмісту олії в насінині конопель