Система орієнтації малогабаритного безпілотного літального апарата
Номер патенту: 117923
Опубліковано: 10.07.2017
Автори: Сільченко Вікторія Романівна, Фірсов Сергій Миколайович, Жежера Іван Володимирович

Формула / Реферат
Система орієнтації малогабаритного безпілотного літального апарата, яка містить блок формування сигналу, вихід якого з'єднаний з четвертим входом блока обчислювача, вихід якого з'єднаний з входом блока посилення сигналу, вихід якого з'єднаний з входом блока сервоприводів, вихід якого з'єднаний з входом блока підвісу камери, вихід блока підвісу камери з'єднаний з п'ятим входом блока обчислювача, вихід блока датчиків прискорення з'єднаний з першим входом блока обчислювача, вихід блока супутникової навігації з'єднаний з першим входом блока обчислювача, вихід блока датчиків кутової швидкості з'єднаний з шостим входом блока обчислювача, вихід блока живлення під'єднаний до третього входу блока обчислювача, яка відрізняється тим, що додатково система має блок двоступеневого підвісу камери з інфрачервоним спектром, вхід якого під'єднаний до першого виходу блока сервоприводів, а вихід з'єднаний з восьмим входом блока обчислювача, та блок магнітометра, вихід якого з'єднаний з сьомим входом блока обчислювача.
Текст
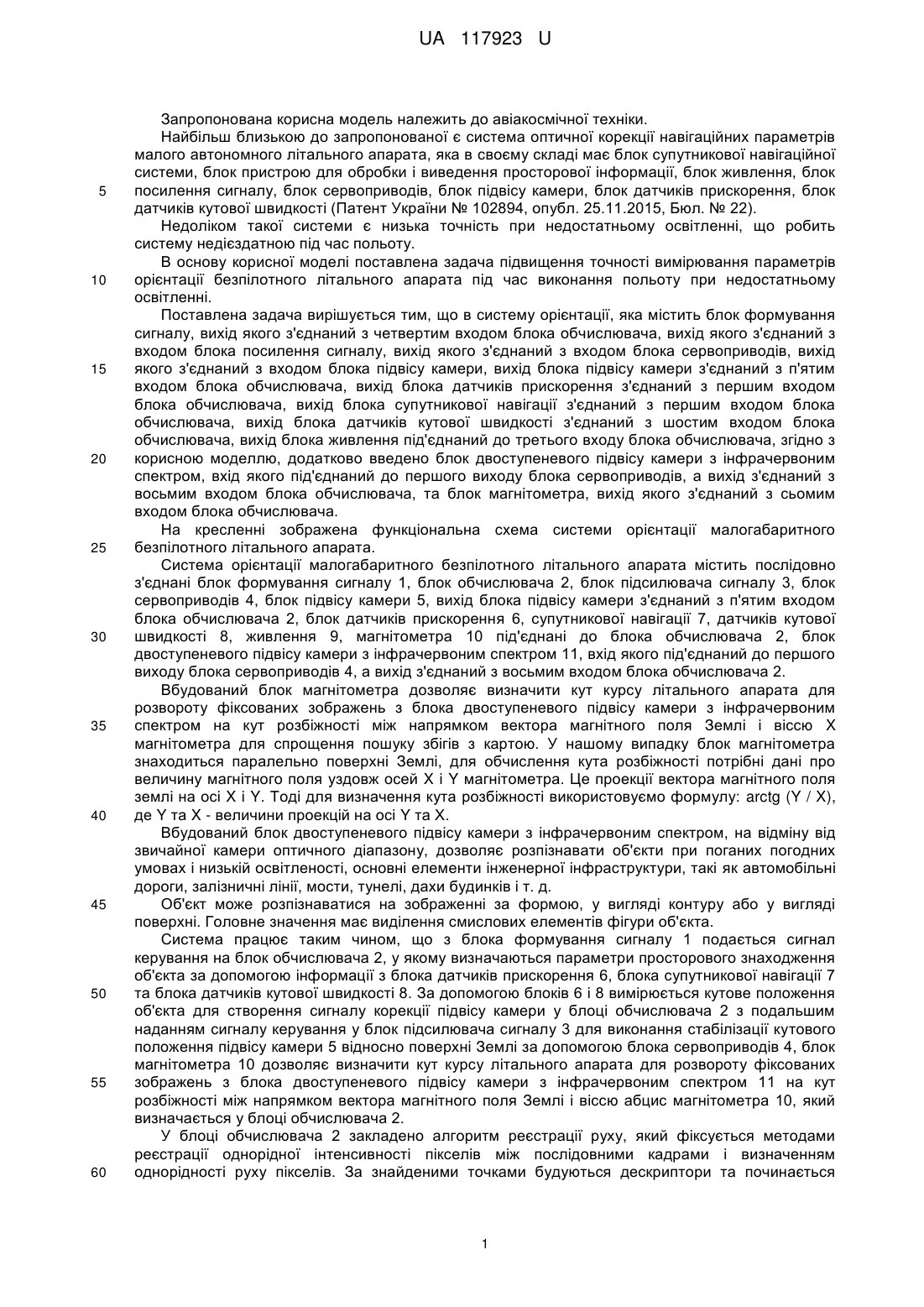
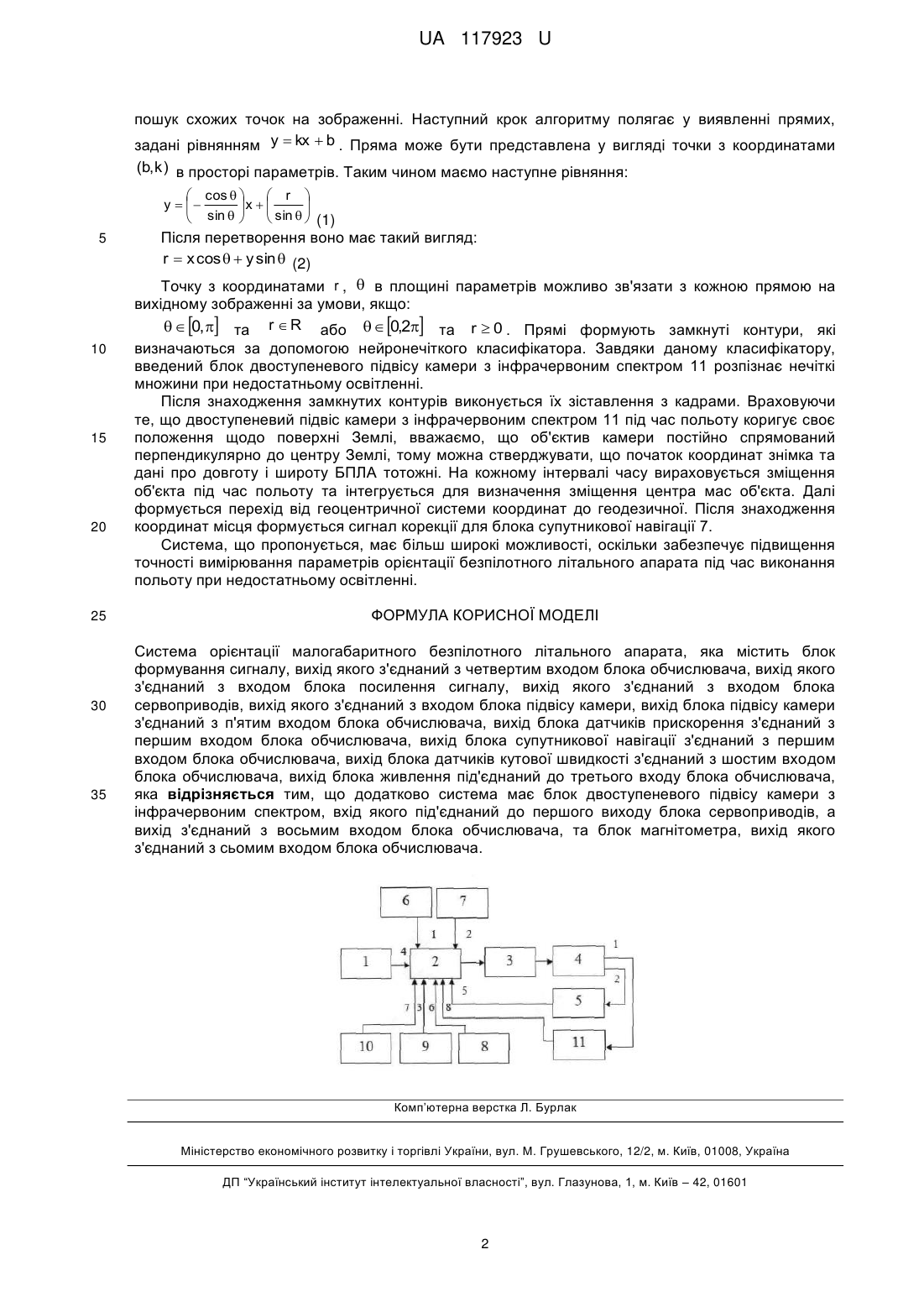
Реферат: Система орієнтації малогабаритного безпілотного літального апарата має блок формування сигналу, вихід якого з'єднаний з четвертим входом блока обчислювача, вихід якого з'єднаний з входом блока посилення сигналу, вихід якого з'єднаний з входом блока сервоприводів, вихід якого з'єднаний з входом блока підвісу камери. Вихід блока підвісу камери з'єднаний з п'ятим входом блока обчислювача. Вихід блока датчиків прискорення з'єднаний з першим входом блока обчислювача. Вихід блока супутникової навігації з'єднаний з першим входом блока обчислювача. Вихід блока датчиків кутової швидкості з'єднаний з шостим входом блока обчислювача. Вихід блока живлення під'єднаний до третього входу блока обчислювача. Додатково система має блок двоступеневого підвісу камери з інфрачервоним спектром, вхід якого під'єднаний до першого виходу блока сервоприводів, а вихід з'єднаний з восьмим входом блока обчислювача, та блок магнітометра, вихід якого з'єднаний з сьомим входом блока обчислювача. UA 117923 U (54) СИСТЕМА ОРІЄНТАЦІЇ МАЛОГАБАРИТНОГО БЕЗПІЛОТНОГО ЛІТАЛЬНОГО АПАРАТА UA 117923 U UA 117923 U 5 10 15 20 25 30 35 40 45 50 55 60 Запропонована корисна модель належить до авіакосмічної техніки. Найбільш близькою до запропонованої є система оптичної корекції навігаційних параметрів малого автономного літального апарата, яка в своєму складі має блок супутникової навігаційної системи, блок пристрою для обробки і виведення просторової інформації, блок живлення, блок посилення сигналу, блок сервоприводів, блок підвісу камери, блок датчиків прискорення, блок датчиків кутової швидкості (Патент України № 102894, опубл. 25.11.2015, Бюл. № 22). Недоліком такої системи є низька точність при недостатньому освітленні, що робить систему недієздатною під час польоту. В основу корисної моделі поставлена задача підвищення точності вимірювання параметрів орієнтації безпілотного літального апарата під час виконання польоту при недостатньому освітленні. Поставлена задача вирішується тим, що в систему орієнтації, яка містить блок формування сигналу, вихід якого з'єднаний з четвертим входом блока обчислювача, вихід якого з'єднаний з входом блока посилення сигналу, вихід якого з'єднаний з входом блока сервоприводів, вихід якого з'єднаний з входом блока підвісу камери, вихід блока підвісу камери з'єднаний з п'ятим входом блока обчислювача, вихід блока датчиків прискорення з'єднаний з першим входом блока обчислювача, вихід блока супутникової навігації з'єднаний з першим входом блока обчислювача, вихід блока датчиків кутової швидкості з'єднаний з шостим входом блока обчислювача, вихід блока живлення під'єднаний до третього входу блока обчислювача, згідно з корисною моделлю, додатково введено блок двоступеневого підвісу камери з інфрачервоним спектром, вхід якого під'єднаний до першого виходу блока сервоприводів, а вихід з'єднаний з восьмим входом блока обчислювача, та блок магнітометра, вихід якого з'єднаний з сьомим входом блока обчислювача. На кресленні зображена функціональна схема системи орієнтації малогабаритного безпілотного літального апарата. Система орієнтації малогабаритного безпілотного літального апарата містить послідовно з'єднані блок формування сигналу 1, блок обчислювача 2, блок підсилювача сигналу 3, блок сервоприводів 4, блок підвісу камери 5, вихід блока підвісу камери з'єднаний з п'ятим входом блока обчислювача 2, блок датчиків прискорення 6, супутникової навігації 7, датчиків кутової швидкості 8, живлення 9, магнітометра 10 під'єднані до блока обчислювача 2, блок двоступеневого підвісу камери з інфрачервоним спектром 11, вхід якого під'єднаний до першого виходу блока сервоприводів 4, а вихід з'єднаний з восьмим входом блока обчислювача 2. Вбудований блок магнітометра дозволяє визначити кут курсу літального апарата для розвороту фіксованих зображень з блока двоступеневого підвісу камери з інфрачервоним спектром на кут розбіжності між напрямком вектора магнітного поля Землі і віссю X магнітометра для спрощення пошуку збігів з картою. У нашому випадку блок магнітометра знаходиться паралельно поверхні Землі, для обчислення кута розбіжності потрібні дані про величину магнітного поля уздовж осей X і Y магнітометра. Це проекції вектора магнітного поля землі на осі X і Y. Тоді для визначення кута розбіжності використовуємо формулу: arctg (Y / X), де Y та X - величини проекцій на осі Y та Х. Вбудований блок двоступеневого підвісу камери з інфрачервоним спектром, на відміну від звичайної камери оптичного діапазону, дозволяє розпізнавати об'єкти при поганих погодних умовах і низькій освітленості, основні елементи інженерної інфраструктури, такі як автомобільні дороги, залізничні лінії, мости, тунелі, дахи будинків і т. д. Об'єкт може розпізнаватися на зображенні за формою, у вигляді контуру або у вигляді поверхні. Головне значення має виділення смислових елементів фігури об'єкта. Система працює таким чином, що з блока формування сигналу 1 подається сигнал керування на блок обчислювача 2, у якому визначаються параметри просторового знаходження об'єкта за допомогою інформації з блока датчиків прискорення 6, блока супутникової навігації 7 та блока датчиків кутової швидкості 8. За допомогою блоків 6 і 8 вимірюється кутове положення об'єкта для створення сигналу корекції підвісу камери у блоці обчислювача 2 з подальшим наданням сигналу керування у блок підсилювача сигналу 3 для виконання стабілізації кутового положення підвісу камери 5 відносно поверхні Землі за допомогою блока сервоприводів 4, блок магнітометра 10 дозволяє визначити кут курсу літального апарата для розвороту фіксованих зображень з блока двоступеневого підвісу камери з інфрачервоним спектром 11 на кут розбіжності між напрямком вектора магнітного поля Землі і віссю абцис магнітометра 10, який визначається у блоці обчислювача 2. У блоці обчислювача 2 закладено алгоритм реєстрації руху, який фіксується методами реєстрації однорідної інтенсивності пікселів між послідовними кадрами і визначенням однорідності руху пікселів. За знайденими точками будуються дескриптори та починається 1 UA 117923 U пошук схожих точок на зображенні. Наступний крок алгоритму полягає у виявленні прямих, задані рівнянням y kx b . Пряма може бути представлена у вигляді точки з координатами (b, k ) в просторі параметрів. Таким чином маємо наступне рівняння: cos r y x sin sin (1) 5 10 15 20 25 30 35 Після перетворення воно має такий вигляд: r x cos y sin (2) Точку з координатами r , в площині параметрів можливо зв'язати з кожною прямою на вихідному зображенні за умови, якщо: 0, та r R або 0,2 та r 0 . Прямі формують замкнуті контури, які визначаються за допомогою нейронечіткого класифікатора. Завдяки даному класифікатору, введений блок двоступеневого підвісу камери з інфрачервоним спектром 11 розпізнає нечіткі множини при недостатньому освітленні. Після знаходження замкнутих контурів виконується їх зіставлення з кадрами. Враховуючи те, що двоступеневий підвіс камери з інфрачервоним спектром 11 під час польоту коригує своє положення щодо поверхні Землі, вважаємо, що об'єктив камери постійно спрямований перпендикулярно до центру Землі, тому можна стверджувати, що початок координат знімка та дані про довготу і широту БПЛА тотожні. На кожному інтервалі часу вираховується зміщення об'єкта під час польоту та інтегрується для визначення зміщення центра мас об'єкта. Далі формується перехід від геоцентричної системи координат до геодезичної. Після знаходження координат місця формується сигнал корекції для блока супутникової навігації 7. Система, що пропонується, має більш широкі можливості, оскільки забезпечує підвищення точності вимірювання параметрів орієнтації безпілотного літального апарата під час виконання польоту при недостатньому освітленні. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Система орієнтації малогабаритного безпілотного літального апарата, яка містить блок формування сигналу, вихід якого з'єднаний з четвертим входом блока обчислювача, вихід якого з'єднаний з входом блока посилення сигналу, вихід якого з'єднаний з входом блока сервоприводів, вихід якого з'єднаний з входом блока підвісу камери, вихід блока підвісу камери з'єднаний з п'ятим входом блока обчислювача, вихід блока датчиків прискорення з'єднаний з першим входом блока обчислювача, вихід блока супутникової навігації з'єднаний з першим входом блока обчислювача, вихід блока датчиків кутової швидкості з'єднаний з шостим входом блока обчислювача, вихід блока живлення під'єднаний до третього входу блока обчислювача, яка відрізняється тим, що додатково система має блок двоступеневого підвісу камери з інфрачервоним спектром, вхід якого під'єднаний до першого виходу блока сервоприводів, а вихід з'єднаний з восьмим входом блока обчислювача, та блок магнітометра, вихід якого з'єднаний з сьомим входом блока обчислювача. Комп’ютерна верстка Л. Бурлак Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01C 23/00, G01C 21/30
Мітки: система, орієнтації, апарата, безпілотного, малогабаритного, літального
Код посилання
<a href="https://ua.patents.su/4-117923-sistema-oriehntaci-malogabaritnogo-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система орієнтації малогабаритного безпілотного літального апарата</a>
Система орієнтації малогабаритного безпілотного літального апарата
Номер патенту: 102894
Опубліковано: 25.11.2015
Автори: Жежера Іван Володимирович, Будіба Уіссам, Фірсов Сергій Миколайович
МПК: G01C 23/00
Мітки: апарата, орієнтації, літального, безпілотного, система, малогабаритного
Формула / Реферат:
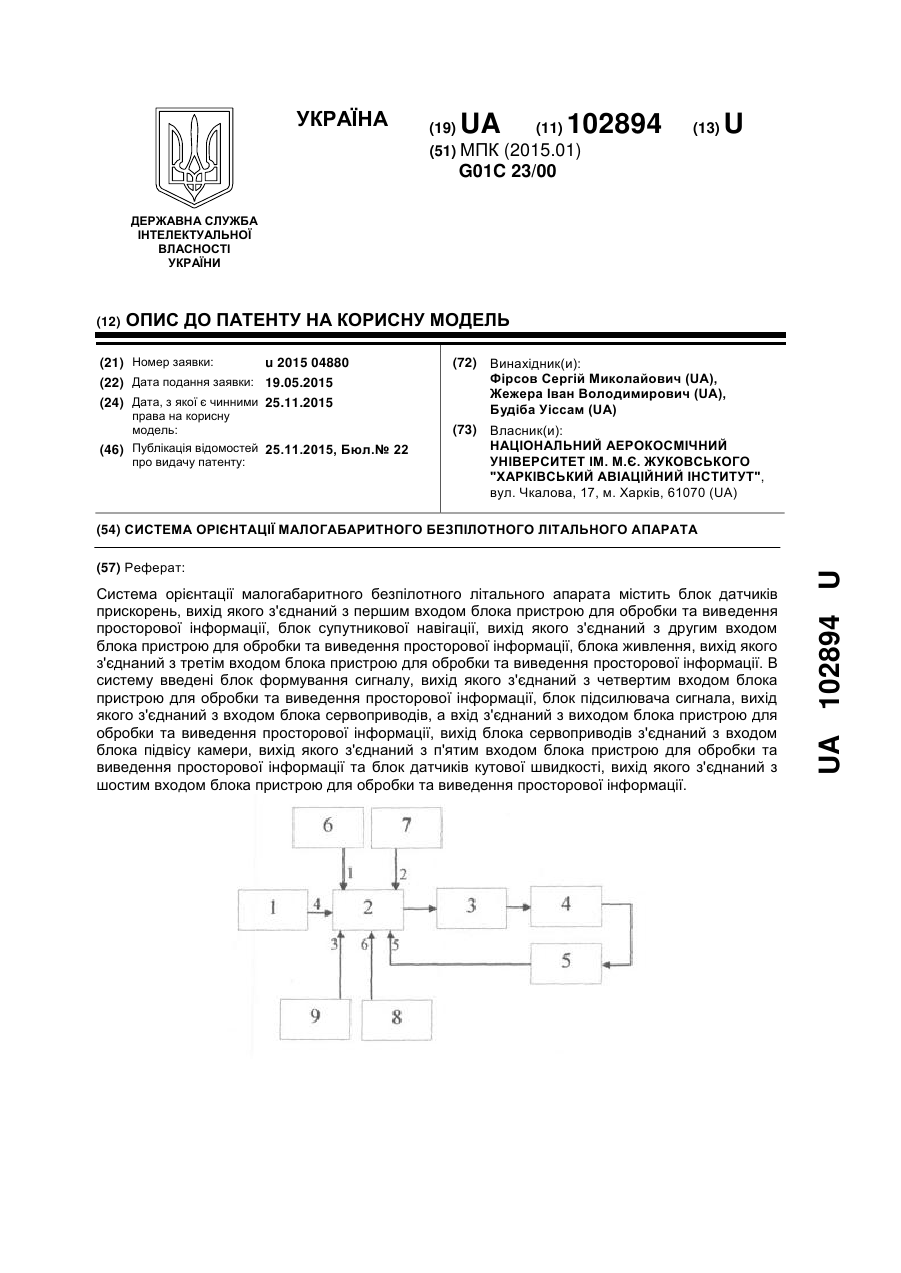
Система орієнтації малогабаритного безпілотного літального апарата, яка містить блок датчиків прискорень, вихід якого з'єднаний з першим входом блока пристрою для обробки та виведення просторової інформації, блок супутникової навігації, вихід якого з'єднаний з другим входом блока пристрою для обробки та виведення просторової інформації, блока живлення, вихід якого з'єднаний з третім входом блока пристрою для обробки та виведення просторової...
Система стабілізації бокового каналу безпілотного літального апарата
Номер патенту: 36498
Опубліковано: 27.10.2008
Автори: Амелін Сергій Вікторович, Бондар Катерина Михайлівна, Жалніна Вікторія Василівна
МПК: G05D 1/03
Мітки: система, стабілізації, безпілотного, бокового, апарата, каналу, літального
Формула / Реферат:
Система стабілізації бокового каналу безпілотного літального апарата, що містить перший та другий порівнювальні пристрої, електронні ключі, сервопривід, вихід якого з'єднаний з входом об'єкта керування, а вхід - з виходом першого блока формування керуючих сигналів, датчик кута та датчик кутової швидкості, які послідовно з'єднані з виходами об'єкта керування, яка відрізняється тим, що до її складу введені нормуючі підсилювачі, входи яких...
Система керування безпілотного літального апарата

Номер патенту: 65814
Опубліковано: 12.12.2011
Автори: Кописов Олег Едуардович, Фірсов Сергій Миколайович, Антонєвич Ганна Олександрівна
МПК: B64C 13/00
Мітки: безпілотного, апарата, літального, система, керування
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також трьох датчиків кута та трьох датчиків кутової швидкості, виходи яких з'єднані з входами відповідно першого, п'ятого, шостого, другого, сьомого, восьмого нормуючих підсилювачів,...
Система стабілізації безпілотного літального апарата
Номер патенту: 65285
Опубліковано: 25.11.2011
Автори: Субота Анатолій Максимович, Льовкін Сергій Генадійович, Кописов Олег Едуардович
МПК: B64C 13/00
Мітки: безпілотного, літального, апарата, система, стабілізації
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить послідовно з'єднані обчислювач, підсилювач, рульову машину, орган управління та датчик кута, датчик кутової швидкості, яка відрізняється тим, що містить задатчик, вихід якого з'єднаний з входом обчислювача, вихід рульової машини одночасно з'єднаний з входом органа управління і через перший перетворювач з'єднаний з входом адаптивного контура, а вихід органа управління з'єднаний...
Система керування безпілотного літального апарата
Номер патенту: 45231
Опубліковано: 26.10.2009
Автори: Честних Тимур Володимирович, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: безпілотного, апарата, керування, літального, система
Формула / Реферат:
Система керування безпілотного літального апарата, що складається з послідовно з'єднаних задавача, мультиплексора, аналого-цифрового перетворювача, обчислювача, цифро-аналогового перетворювача, сервоприводу, вихід якого під'єднаний до об'єкта керування, а також датчиків кута та кутової швидкості, виходи яких з'єднані з входами відповідно першого та другого нормуючих підсилювачів, виходи яких з'єднані з другим та третім входами мультиплексора,...
Наступний патент: Формувач періодичної двофазної послідовності імпульсів типу меандр з програмованою тривалістю
Випадковий патент: Засувка шиберна