Когерентно-імпульсна рлс з селекцією рухомих об’єктів
Номер патенту: 20725
Опубліковано: 07.10.1997
Автори: Шаповал Олександр Анатолійович, Рогов Петро Дмитрович, Касаткін Леонід Веніамінович, Новицький Валентин Миколаєвич, Марковський Дмитро Володимирович

Формула / Реферат
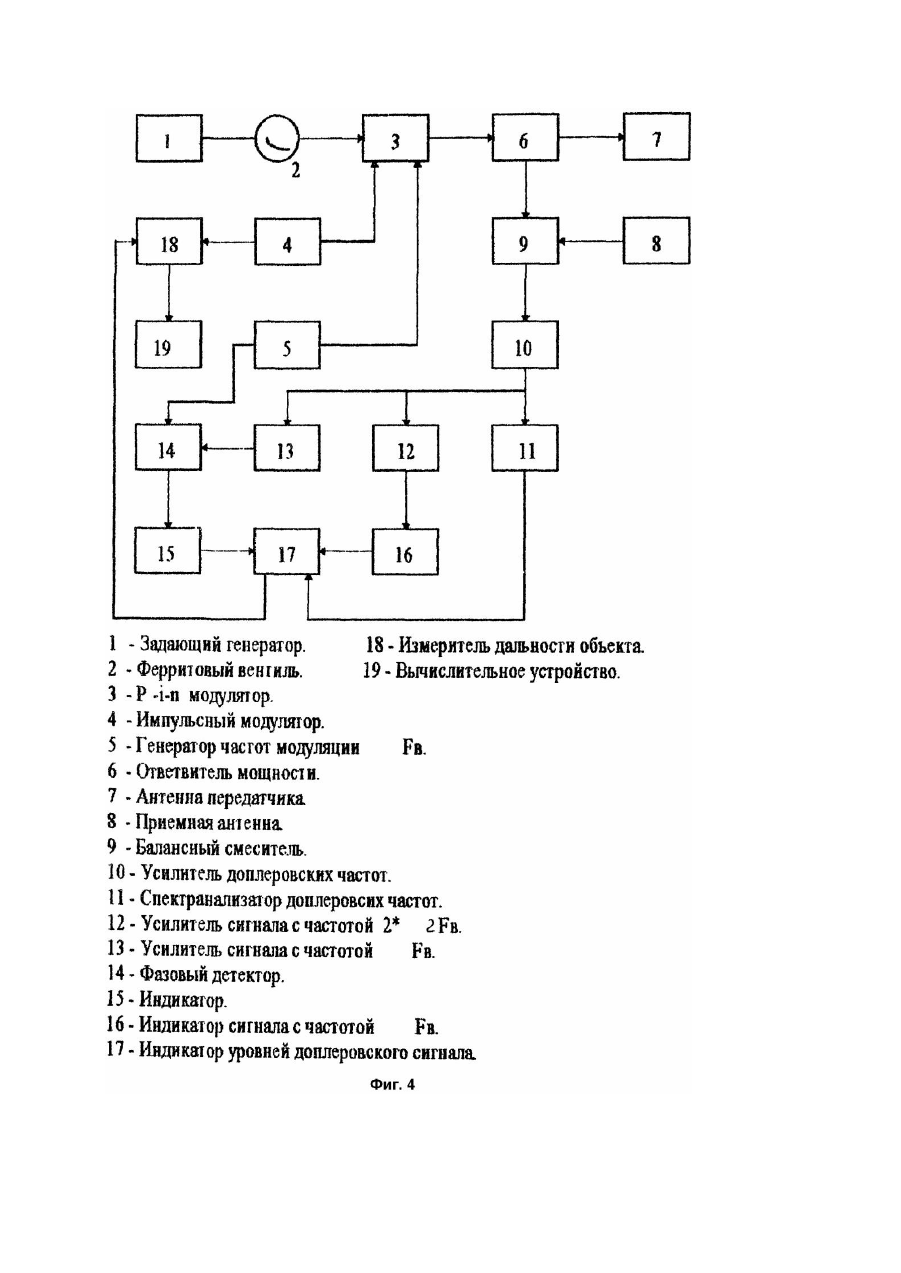
Когерентно-импульсная РЛС с селекцией движущихся объектов, содержащая импульсный передатчик СВЧ, включающий импульсноый модулятор и генератор зондирующих когерентных СВЧ радиоимпульсов, приемное устройство, включающее смеситель и усилитель отраженных сигналов, индикатор скорости и индикатор дальности движущегося объекта, антенную систему, к которой присоединены приемное и передающее устройства, отличающаяся тем, что усилитель отраженных от цели сигналов выполнен с полосой пропускания, равной интервалу доплеровских частот, соответствующих интервалу измеряемых скоростей, импульсный передатчик СВЧ выполнен с длительностью зондирующих импульсов периодически изменяющейся в пределах от τmin до τmax при постоянной скважности Q =2-2,3, к выходу усилителя отраженных сигналов подключен блок индикации минимальных и максимальных уровней сигнала доплеровской частоты, к выходу импульсного модулятора и к блоку индикации минимальных и максимальных уровней доплеров-ского сигнала включен измеритель длительностей зондирующего импульса, соответствующих этим минимальным и максимальным уровням, к измерителю длительностей зондирующего импульса включено вычислительное устройство, производящее однозначное определение расстояния до движущегося объекта и при этом:
![]()
где τmin и τmax – минимальная и максимальная дальности действия РЛС, при определении расстояния до объекта по результатам измерений максимальных длительностей зондирующего импульса, соответствующих минимальному или максимальному уровнюдоплеровского сигнала:и
![]()
при определении расстояния до объекта по результатам измерений следующих друг за другом значений длительностей зондирующего сигнала, соответствующих двум соседним максимумам или минимумам уровня сигнала доплеровской частоты.
Текст
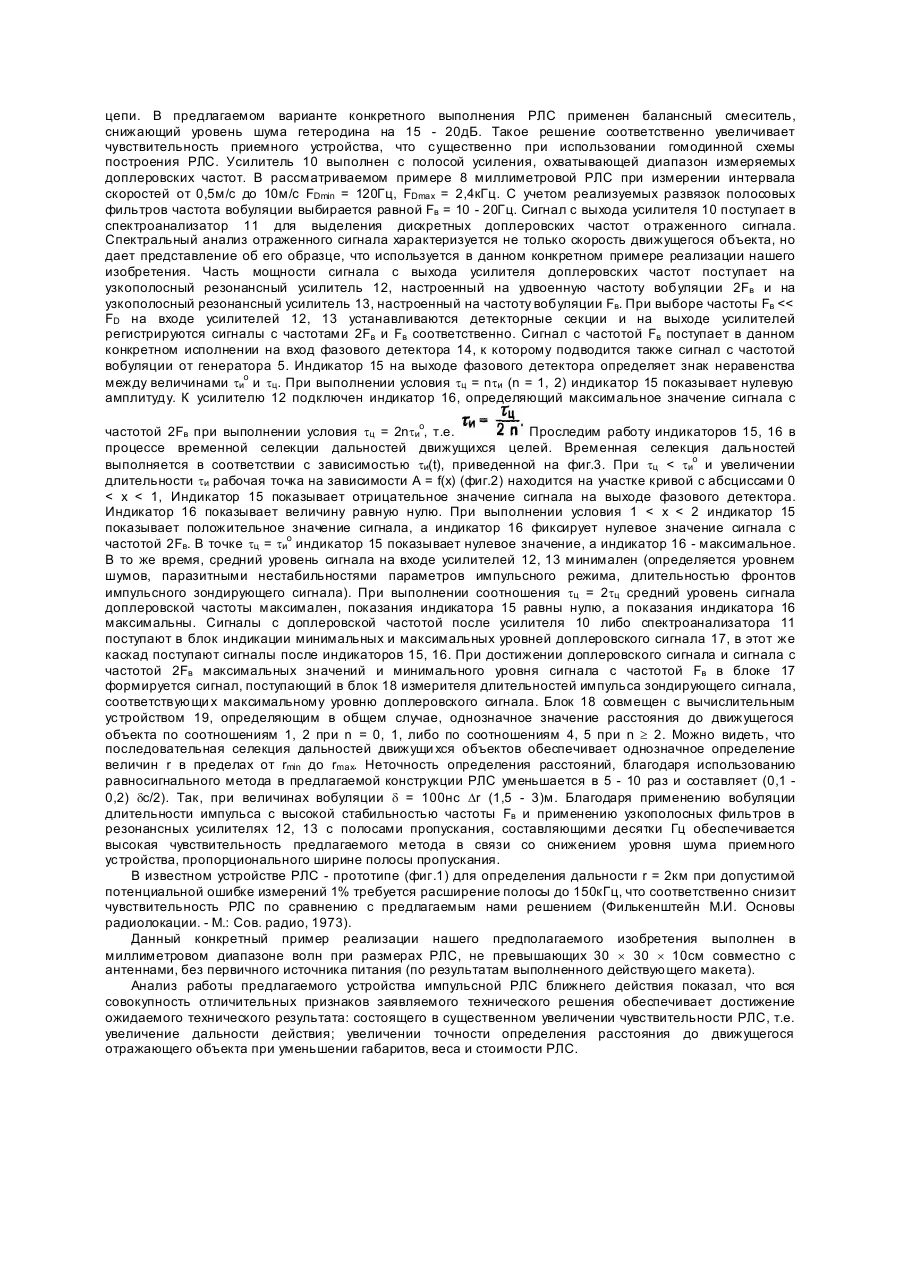
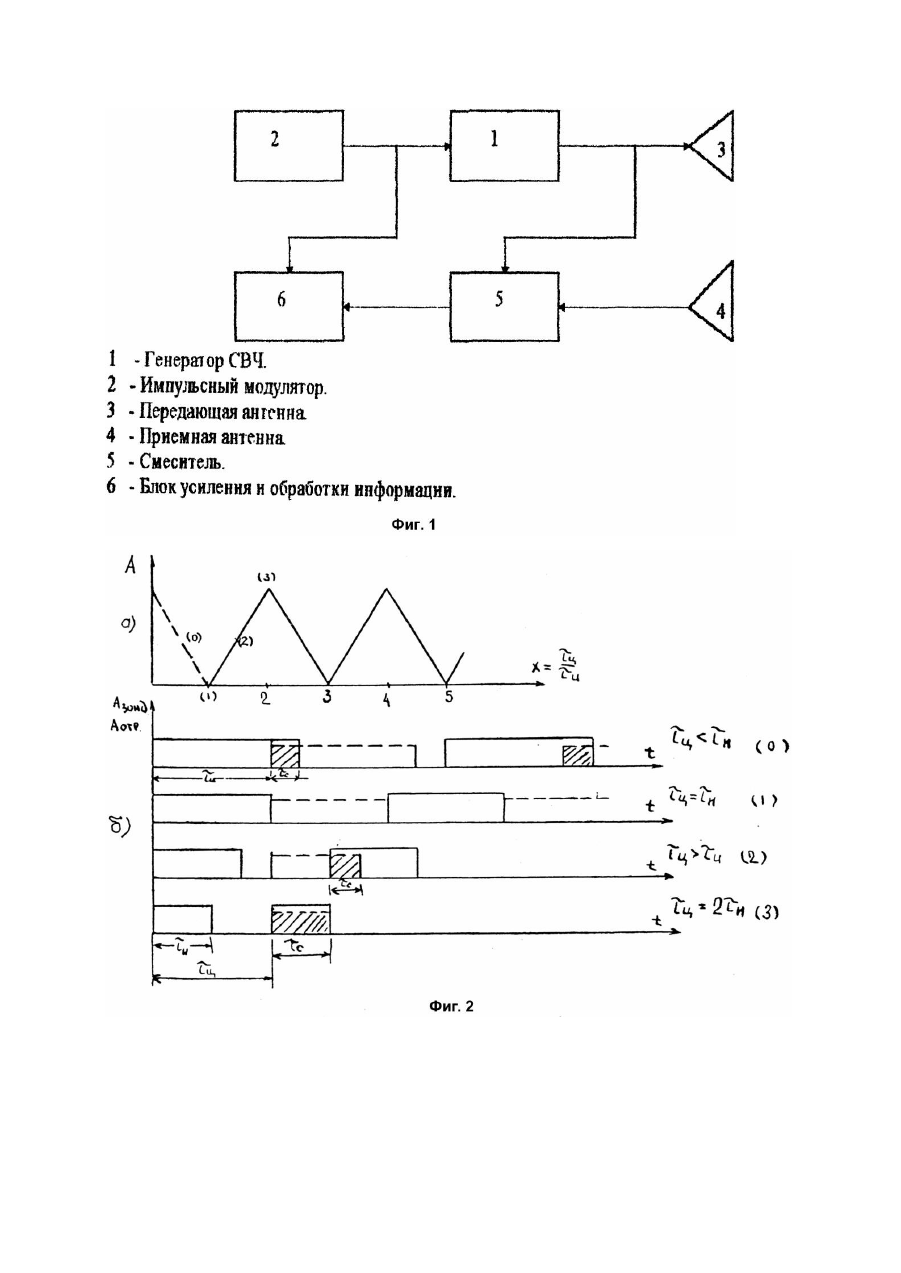
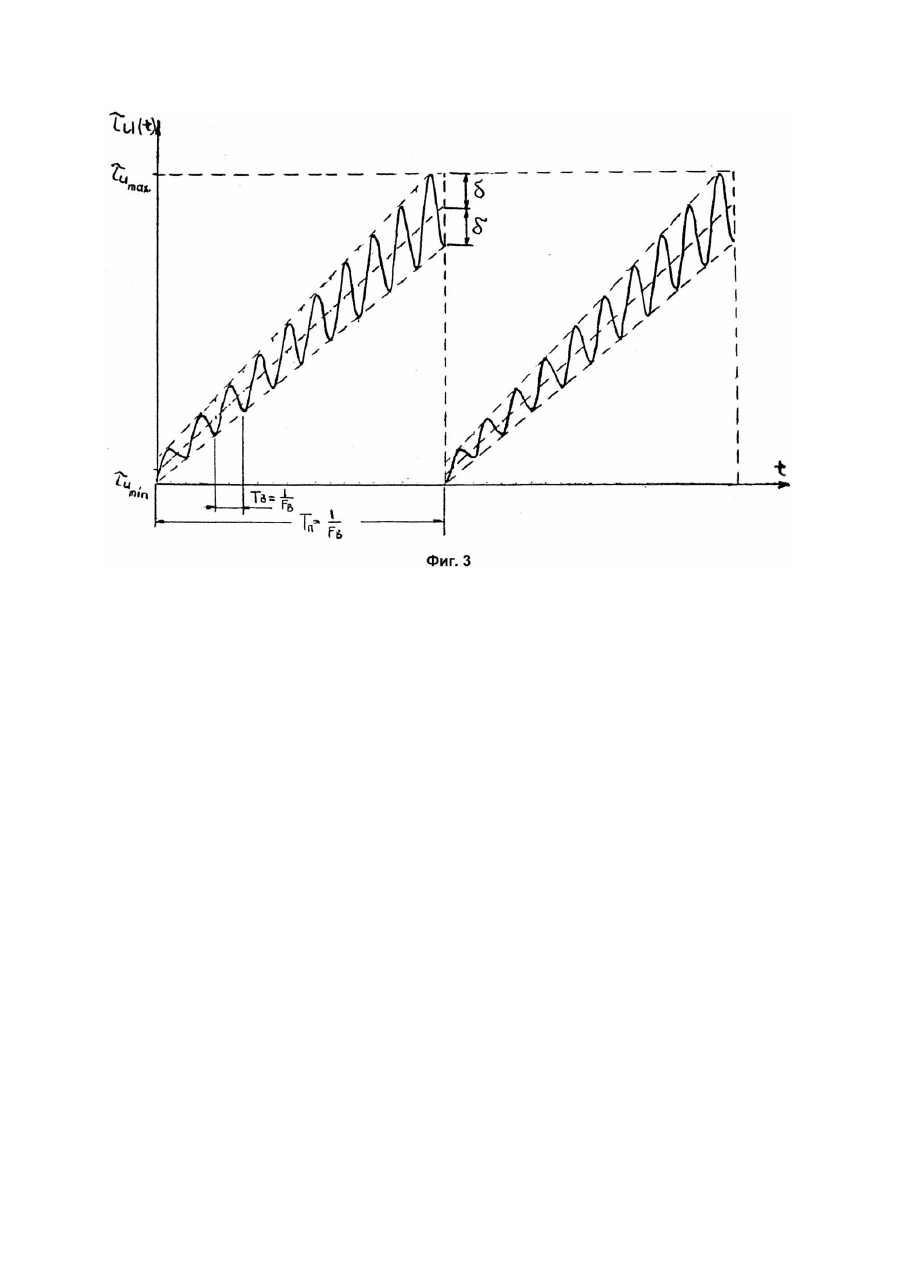
Изобретение относится к радиолокационной технике, а точнее к импульсным радиолокационным системам ближнего действия селекции движущихся объектов. Изобретение наиболее эффективно может быть использовано при построении РЛС в системах диспетчерской службы морских и авиапортов, в навигационных системах морских и речных судов, в системах охраны, в пограничной и таможенной службах. Известны принципы построения РЛС импульсного действия для селекции движущи хся объектов (Теоретические основы радиолокации / Под ред. Д. Ширмана. - М.: Сов. радио, 1970); Справочник по радиолокации. - Т.3. Радиолокационные устройства и системы. - М.: Сов. радио, 1979). Такие РЛС определяют азимут и расстояние до цели, а также, при необходимости, определяют скорость цели. В основе построения известных импульсных РЛС СДЦ лежит применение когерентного генератора, генерирующего пачки когерентных радиоимпульсов - системы истинно когерентные, либо применение некогерентного импульсного генератора, формирующего некогерентную последовательность зондирующих импульсов, однако, при обязательном использовании устройства запоминания начальной фазы каждого импульса - системы псевдокогерентные. В известных когерентно-импульсных РЛС СДЦ подавление сигналов неподвижных целей достигается применением специальных устройств-селекторов сигналов движущихся и неподвижных целей, например, систем черезпериодной компенсации. Реализация систем селекции сигналов движущи хся целей приводит к значительному усложнению конструкции и к необходимости выполнения жестких требований к стабильности частоты генераторов СВЧ, высокой стабильности периода повторений импульсов и их длительности. Необходимая разрешающая способность по дальности и точность определения расстояния до цели достигается уменьшением длительности импульса зондирующего сигнала при соответствующем расширении полосы пропускания приемного устройства. В результате возрастают шумы в цепях приемника и оказывается необходимым существенно увеличить уровень импульсной мощности передатчика. Таким образом, известные когерентно-импульсные РЛС СДЦ, определяющие координаты движущейся цели, характеризуются значительной сложностью конструкции, высокими требованиями к стабильности основных параметров, к уровню мощности передатчика. Одним из известных аналогов данного изобретения является когерентно-импульсная РЛС малой скважности ([л.3] П.А. Бакулев, В.М. Степин. Ме тоды и устройства селекции движущихся целей. - М.: Радио и связь, 1986). При работе данной РЛС, например, со скважностью Q = 2 обеспечивается временное разделение работы передатчика и приемника благодаря попеременному включению передатчика и приемника на равные интервалы времени. Для подавления сигналов, отраженных от неподвижных целей, применяются гребенчатые фильтры с ограниченным числом полос запирания благодаря применению малой скважности. Однозначное определение дальности в данной РЛС достигается лишь при длительности зондирующего импульса, превышающей время запаздывания до цели. При этом, однако, существенно возрастает уровень помех от распределенных поверхностных и объемных целей. Кроме того, для определения дальности необходимо расширить полосу пропускания усилителя отраженных сигналов до величин где tc - длительность импульса после детектора, равная в общем случае малой части длительности зондирующего импульса. При этом, однако, соответственно возрастает уровень шумов и уменьшается чувствительность приемника. При высокой частоте повторения, когда длительность зондирующего импульса меньше времени запаздывания данная РЛС не удовлетворяет условию однозначного определения дальности. Из известных те хнических решений наиболее близким по технической сущности к заявленному (прототипом) является импульсная доплеровская РЛС ([л.4] Патент США №43108842, кл. G01S13/04 НКИ 343 - 5РД, F:Iled Feb.8, 1980, Ser. №119.911 Claims priority application Fed. Rep. of Germany, Feb.24, 1979, 290 7315, Публикация 1982г., 12 января, т.1014, №2, Pulsed Doppler Radar Systems). Импульсная доплеровская РЛС выполнена в соответствии со структурной схемой фиг.2.1. В схеме фиг.2.1 зондирующие импульсы формируются генератором СВЧ 1, к которому подключен импульсный модулятор 2. Генератор СВЧ подключен к передающей антенне 3. Принимаемый сигнал из приемной антенны 4 поступает в смеситель 5, к которому подводится также импульсный сигнал генератора СВЧ 1. Сигнал разностной частоты после смесителя поступает в блок 6 усиления и обработки информации для определения и индикации дальности до цели и ее скорости. Длительность импульса зондирующего сигнала выбрана фиксированной и превышающей двойное время распространения сигнала до максимально удаленной цели. При этом обработка информации, с учетом запаздывающего отраженного сигнала от цели, проводится в течение части длительности передаваемого зондирующего сигнала. При этом длительность импульса tc на выходе смесителя 5 в общем случае значительно меньше длительности зондирующего импульса. Очевидно, что для извлечения информации о дальности до цели в блоке 6 необходимо существенно расширить полосу пропускания усилителя и блока обработки информации. Последовательность импульсных посылок не является когерентной. Но в пределах каждого зондирующего импульса сигнал СВЧ генератора и отраженный от цели сигнал являются когерентными. Для обеспечения точного определения дальности необходимо блок 6 обработки информации выполнить с полосой частот Df ³ 1/tc достаточной для прохождения прямоугольного импульса после смесителя с длительностью tc с минимальным искажением. Однако, при этом возрастает уровень шума, что приводит к значительному увеличению ошибки в определении дальности до цели и к необходимости соответствующего увеличения уровня мощности передатчика для обеспечения требуемой максимальной дальности rmax. Можно видеть, что общим во все х известных радиолокационных системах, относящихся к аналогам данного изобретения и к прототипу измерения дальности достигается на основе измерения длительности отраженных импульсов, требующего неискаженной передачи импульсного сигнала, что достижимо только при расширении полосы пропускания приемника до величин Df > 1/tc и приводит к соответствующему увеличению шумов и помех и к снижению чувстви тельности РЛС, т.е. к уменьшению дальности при прочих неизменных условиях. Предлагаемое изобретение направлено на совершенствование когерентно-импульсной доплеровской РЛС путем нового выполнения импульсного СВЧ передатчика, системы обработки информации и индикации сигнала, введения новых дополнительных узлов в стр уктурную схему РЛС, что позволяет существенно уменьшить ширину полосы пропускания приемного устройства, т.е. увеличить дальность действия РЛС, увеличить точность определения дальности до движущегося объекта и одновременно уменьшить габариты, вес и стоимость РЛС. Заявленный технический результат достигается тем, что в когерентно-импульсной РЛС с селекцией движущи хся объектов, содержащей импульсный передатчик СВЧ, включающий импульсный модулятор и генератор зондирующих когерентных СВЧ радиоимпульсов, приемное устройство, включающее смеситель и усилитель отраженных сигналов, индикатор скорости и индикатор дальности движущегося объекта, антенную систему, к которой присоединены приемное и передающее устройства, усилитель отраженных от цели сигналов выполнен с полосой пропускания равной интервалу доплеровских частот, соответствующих интервалу измеряемых скоростей, импульсный передатчик СВЧ выполнен с длительностью зондирующих импульсов периодически изменяющейся в пределах от tmin до tmax при постоянной скважности Q = 2 - 2,3, к выходу усилителя отраженных сигналов подключен блок индикации минимальных и максимальных уровней сигнала доплеровской частоты, к выходу импульсного модулятора и к блоку индикации минимальных и максимальных уровней доплеровского сигнала включен измеритель длительностей зондирующего импульса, соответствующих этим минимальным и максимальным уровням, к измерителю длительностей зондирующего импульса включено вычислительное устройство, производящее однозначное определение расстояния до движущегося объекта и при этом: где rmin и rmax - минимальная и максимальная дальности действия РЛС, если расстояние до объекта определяется по результатам измерений максимальных длительностей зондирующего импульса, соответствующи х минимальному или максимальному уровню доплеровского сигнала, и если расстояние до объекта определяется по результатам измерений следующих др уг за другом значений длительностей зондирующего сигнала, соответствующи х двум соседним максимумам или минимумам уровня сигнала доплеровской частоты. Новые признаки, которыми обладает заявляемое техническое решение, а именно: - выполнение усилителя отраженных от цели сигналов с полосой пропускания равной интервалу доплеровских частот, соотве тствующи х интервалу измеряемых скоростей; - периодическое изменение длительностей зондирующи х импульсов передатчика СВЧ в пределах от tmin до tmax при постоянной скважности Q » 2 - 2,3; - введение в приемно-индикаторное устройство РЛС дополнительных блоков, а именно: блока индикации минимальных и максимальных уровней сигнала доплеровской частоты, измерителя длительностей зондирующего импульса, соответствующи х этим минимальным и максимальным уровням, вычислительного устройства - обеспечивают соответствие заявляемого изобретения критерию "новизна". Эти признаки позволяют достичь ожидаемый технический результат, состоящий в существенном увеличении чувствительности приемного устройства РЛС, т.е. увеличении дальности действия РЛС, увеличении точности определения дальности движущегося объекта при одновременном уменьшении габаритов, веса и стоимости РЛС, что поясняется следующим образом. Полоса пропускания приемного устройства в предлагаемой конструкции рассчитана на прохождение и определение доплеровских частот. С учетом реальных требований к определению скоростей движущи хся наземных объектов, например, в интервале скоростей 0,5м/сек - 10м/сек, дискретные полосы пропускания отдельных каналов спектроанализатора скоростей составляют десятки - несколько сотен Гц. Таким образом, индикация сигналов в предлагаемой конструкции производится узкополосными усилительноиндикаторными узлами РЛС. Указанные полосы пропускания достаточны для измерения с необходимой точностью скоростей движущи хся объектов. Однако указанные полосы пропускания приводят к увеличению длительности нарастания прямоугольных импульсов до величин, составляющих десятые и сотые доли секунды, что совершенно неприемлемо для определения дальности до движущегося объекта при использовании традиционных методов радиолокации, применяемых в известных конструкциях когерентно-импульсных РЛС. В данном предлагаемом изобретении точное определение расстояния до движущегося объекта обеспечивается при использовании приемного устройства с узкими полосами пропускания частот. Определение расстояния до движущегося объекта согласно изобретению требует измерения длительностей импульса зондирующего сигнала, соответствующи х минимальным и максимальным уровням сигнала с доплеровской частотой, возникающим при периодическом изменении длительности импульса зондирующего сигнала. Указанные длительности зондирующи х импульсов tи можно измерять различными методами и соответственно при различных принципах построения дополнительных блоков в приемо-индикаторном устройстве заявляемой конструкции РЛС. Например, возможны следующие методы: - ручной метод изменения tи, индикация максимальных и минимальных уровней Amax и Amin сигналов доплеровской частоты на выходе усилителя отраженных сигналов и определение при использовании частотомера соответствующи х значений tио (Amax, tи о, Amin); - метод, использующий электронно-лучевой осциллографический индикатор с разверткой по оси X, соответствующей пилообразному изменению длительности зондирующего импульса и с отклонением от оси Y, определяющим уровень сигнала доплеровской частоты; - метод, основанный на периодической вобуляции длительности импульса с частотой вобуляции Fв, лежащей вне полосы измеряемых доплеровских частот. Этот метод представляет интерес в связи с высокой точностью определения расстояния r, с возможностью применения этого метода в системах автоматического сопровождения движущихся целей и поэтому далее в описании данного изобретения он рассматривается детально. Определения дальности движущегося объекта с высокой точностью в конкретном варианте предлагаемой конструкции достигается путем создания когерентно-импульсного передатчика СВЧ с постоянной скважностью импульсных посылок Q » 2, вобуляцией длительности импульса tи на величину + d и периодическим изменением средней длительности импульса в пределах до где rmin и rmax минимальное и максимальное значения дальностей действия РЛС. Принцип определения дальности движущегося объекта в предлагаемой конструкции сводится к следующему: при выполнении условия где r - дальность до движущегося объекта, tц - время прохождения зондирующего сигнала до объекта и обратно, сигнал скорости объекта на доплеровской частоте не индицируется; при уровень сигнала скорости достигает максимального значения; при уровень сигнала скорости принимает некоторое промежуточное значение. Вобуляция длительности импульса передатчика на величину d при неизменной скважности импульсных посылок Q = 2 приводит к вариациям величины сигнала на выходе усилителя доплеровских частот (с частотой Fв при выполнении условий (3). При выполнении условия tц tио (2n + 1) увеличение длительности импульса гетеродина уменьшает сигнал. Таким образом, фаза периодических вариаций сигнала на выходе усилителя определяет область расположения движущегося объекта по отношению к расстоянию При выполнении условий (1), (2) вариации сигнала с частотой Fв исчезают и возникают колебания с частотой 2Fв. Таким образом, при плавном изменении во времени длительности импульса tи(t) и одновременной вобуляции длительности импульса будут проходить одна за другой области расстояний, соответствующие условию (2), в которых исчезает сигнал с частотой вобуляции Fв и становится максимальным сигнал с частотой 2Fв. Наибольшее среднее значение длительности зондирующего импульса, при которой сигнал с частотой 2Fв на выходе смесителя принимает максимальное значение при одновременном максимальном значении амплитуды сигнала доплеровской частоты соответствует равенству tц = 2tио (Amax). Следует отметить, что при выполнении условия (1) также исчезает сигнал с частотой Fв и становится максимальным сигнал с частотой 2Fв. Однако, в этих областях уровень сигнала с доплеровской частотой при прочих равных условиях значительно меньше, чем в областях, соответствующи х (2). На фиг.2 приведена графическая иллюстрация принципа действия предлагаемой конструкции. На этом рисунке приведена зависимость амплитуды сигнала на выходе усилителя доплеровских частот в зависимости от величины X = tц /t и. На фиг.2б приведены временные зависимости зондирующи х и о траженных импульсных сигналов (Aзон.(t) и Aотр.(t) - сплошные и пунктирные импульсные посылки соответственно) для различных отношений x = tц /t и, определяющие положения рабочей точки на зависимости амплитуды сигнала на выходе смесителя от x - фиг.2а. Номера рабочих точек и соответствующие им временные зависимости импульсных сигналов приведены на фиг.2а и 2б (в кружках). При плавном изменении длительности импульса t зондирующего сигнала в пределах, определяемых минимальной и максимальной дальностями действия предлагаемой РЛС, а именно последовательно проходятся области максимальной и минимальной чувствительности приемного устройства при x = 2n и x = 2n + 1 (n = 0, 1, 2...) - соответственно. Область с максимальной чувствительностью, соответствующая максимальной длительности зондирующего импульса имеет место при n = 1, т.е. tц = 2tи о(Amax) (т-ка 2 на фиг.2а). В этой точке r = rи о(Amax) × c. Область с минимальной чувстви тельностью, соответствующая максимальной длительности зондирующего импульса имеет место при n = 0, т.е. tц = tио(Amin) (т-ка 1 на фиг.2а). В этой точке r = tио(Amin) × c/2. При расстояниях до цели - соответствующем tц 1, соответствующих соотношению tц > tи. В этом случае в процессе селекции дальности целей при изменении средней длительности зондирующего импульса измеряются длительности зондирующего сигнала tио(n)(Amax) и t ио(n+1)(Amax), соответствующие следующим друг за другом точкам максимальной чувстви тельности пpи tц = 2ntио(n)(Amax) = 2(n+1)tио(n+1)(Amax) вычисляется отношение указанных измеренных длительностей импульсов и определяется дальность до цели согласно формуле: Аналогично, расстояние до движущегося объекта может быть определено по измерению tи(n)о(Amin) и tи(n+1)о(Amin), соответствующи х следующим друг за другом точкам минимальной чувстви тельности при tц (2n+1) tио(n)(Amin) = [2(n+1) + 1]t ио(n+1)(Amin) и при этом: Пределы периодического изменения средней величины длительности импульса в указанных случаях находится в отношении Можно видеть, что определение расстояния r до движущегося объекта при n > 1 значительно уменьшает интервал периодического изменения средней длительности импульса зондирующего сигнала. Периодическое изменение длительности импульса в пределах tиmin - t иmax в предлагаемой конструкции РЛС является средством зондирования (селекции) отражающих объектов по расстоянию. Вобуляция длительности импульса обеспечивает при этом однозначную индикацию дальности до цели по величине максимальной длительности зондирующего импульса в точках x = 1,2 или по соотношению (5) при n > 1, точки x = 2n и x = 2n+1. Для обеспечения селекции движущихся целей и определения их дальностей узкополосные резонансные усилители на частотах Fв и 2Fв включены после системы фильтрации доплеровских частот, рассчитанной на индикацию целей движущи хся со скоростями vmin £ v £ vmax. На выходе такой системы сигналы, отраженные от неподвижных целей отсутствуют. Частоты Fв и 2Fв выбираются из условия 2Fв
ДивитисяДодаткова інформація
Автори англійськоюKasatkin Leonid Veniaminovych, Markovskyi Dmytro Volodymyrovych, Rohov Petro Dmytrovych, Shapoval Oleksandr Anatoliiovych
Автори російськоюКасаткин Леонид Вениаминович, Марковский Дмитрий Владимирович, Рогов Петр Дмитриевич, Шаповал Александр Анатольевич
МПК / Мітки
МПК: G01S 13/53, G01S 13/00
Мітки: рлс, когерентно-імпульсна, селекцією, рухомих, об'єктів
Код посилання
<a href="https://ua.patents.su/9-20725-kogerentno-impulsna-rls-z-selekciehyu-rukhomikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Когерентно-імпульсна рлс з селекцією рухомих об’єктів</a>
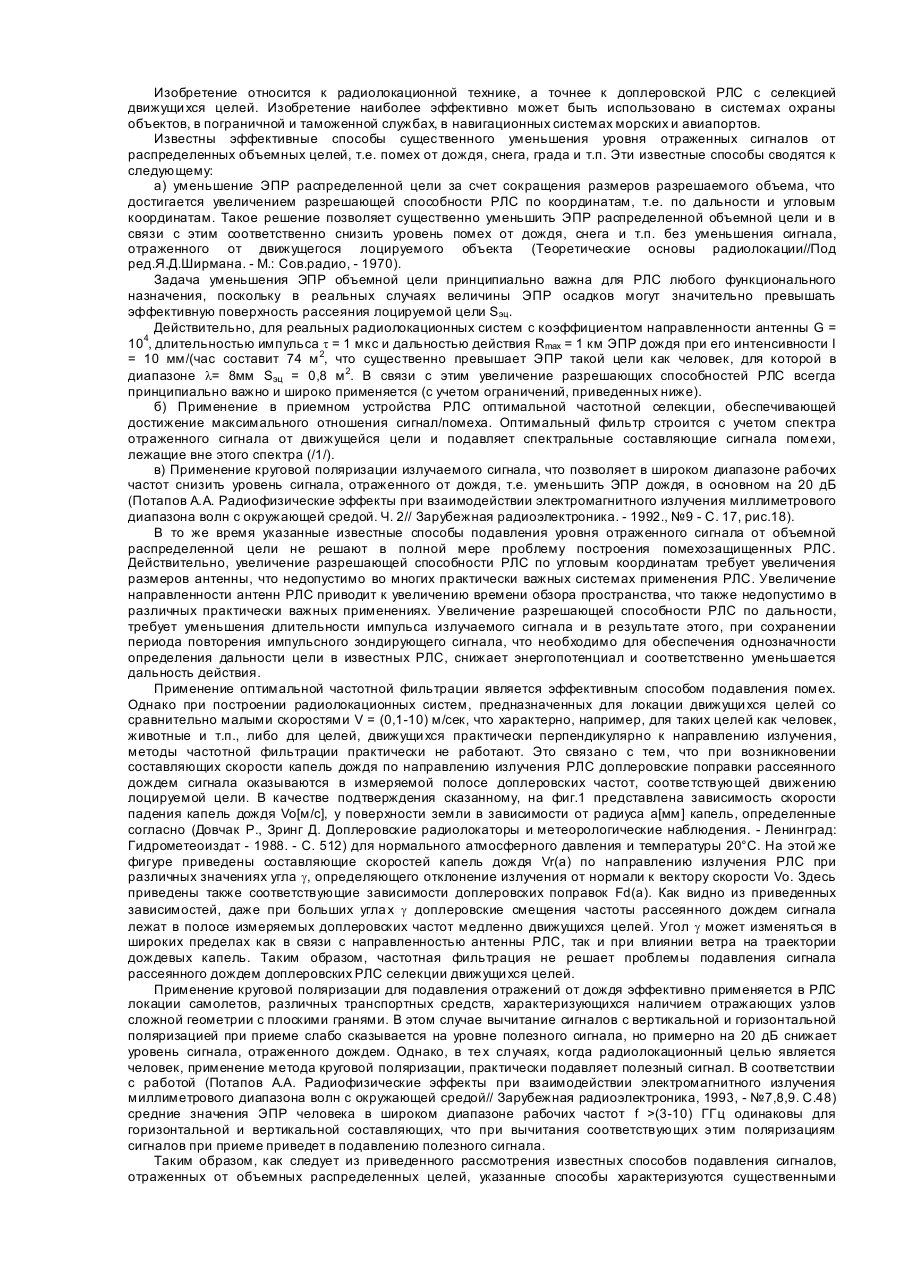
Спосіб заглушування завад для доплеровської рлс з селекцією рухомих цілей, які викликані відбиттям електромагнітних хвиль від об’ємних розподілених цілей
Номер патенту: 17872
Опубліковано: 03.06.1997
Автори: Дубровський Сергій Єгорович, Касаткін Леонід Веніамінович, Феньов Дмитро Васильович, Рогов Петро Дмитрович
МПК: G01S 7/36, G01S 13/50
Мітки: рухомих, доплеровської, цілей, селекцією, розподілених, рлс, завад, заглушування, об'ємних, викликані, відбиттям, спосіб, хвиль, електромагнітних
Формула / Реферат:
Способ подавления помех для доплеровских РЛС с селекцией движущихся целей, вызванных отражениями электромагнитных волн от распределенных объемных целей - дождя, снега, града и т.п., заключающийся в выделении и усилении отраженных сигналов с доплеровскими поправками частоты, фильтрации сигналов доплеровских частот системой узкополосных фильтров (гребенкой фильтров) для определения скорости цели, индикации движущейся цели, отличающийся тем, что...
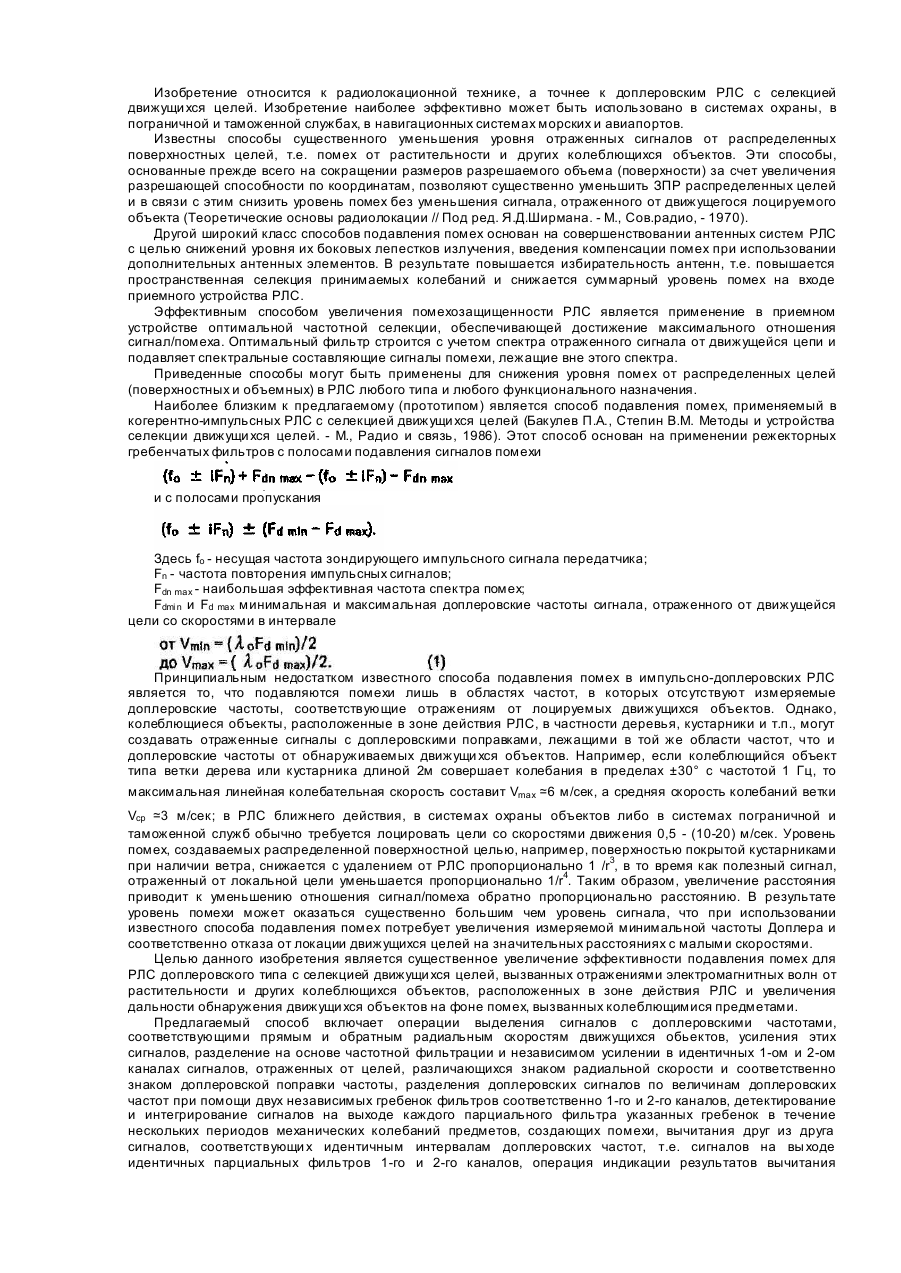
Спосіб заглушування завад для доплеровської рсл з селекцією рухомих цілей, які викликані відбиттям електромагнітних хвиль від рослинності та інших предметів, які коливаються
Номер патенту: 17870
Опубліковано: 03.06.1997
Автори: Дубровський Сергій Егорович, Рогов Петро Дмитрович, Феньов Дмитро Васильович, Касаткін Леонід Веніамінович
МПК: G01S 7/36, G01S 13/50
Мітки: коливаються, доплеровської, заглушування, електромагнітних, цілей, викликані, селекцією, рухомих, спосіб, інших, рослинності, рсл, відбиттям, завад, хвиль, предметів
Формула / Реферат:
Способ подавления помех для доплеровских РЛС с селекцией движущихся целей, вызванных отражениями электромагнитных волн от растительности и других колеблющихся предметов, расположенных в зоне действия РЛС, заключающийся в выделении и усилении отраженных сигналов с доплеровскими поправками частоты, содержащими информацию о величине и знаке радиальной скорости цепи, разделении на основе частотной фильтрации и независимом усилении сигналов,...
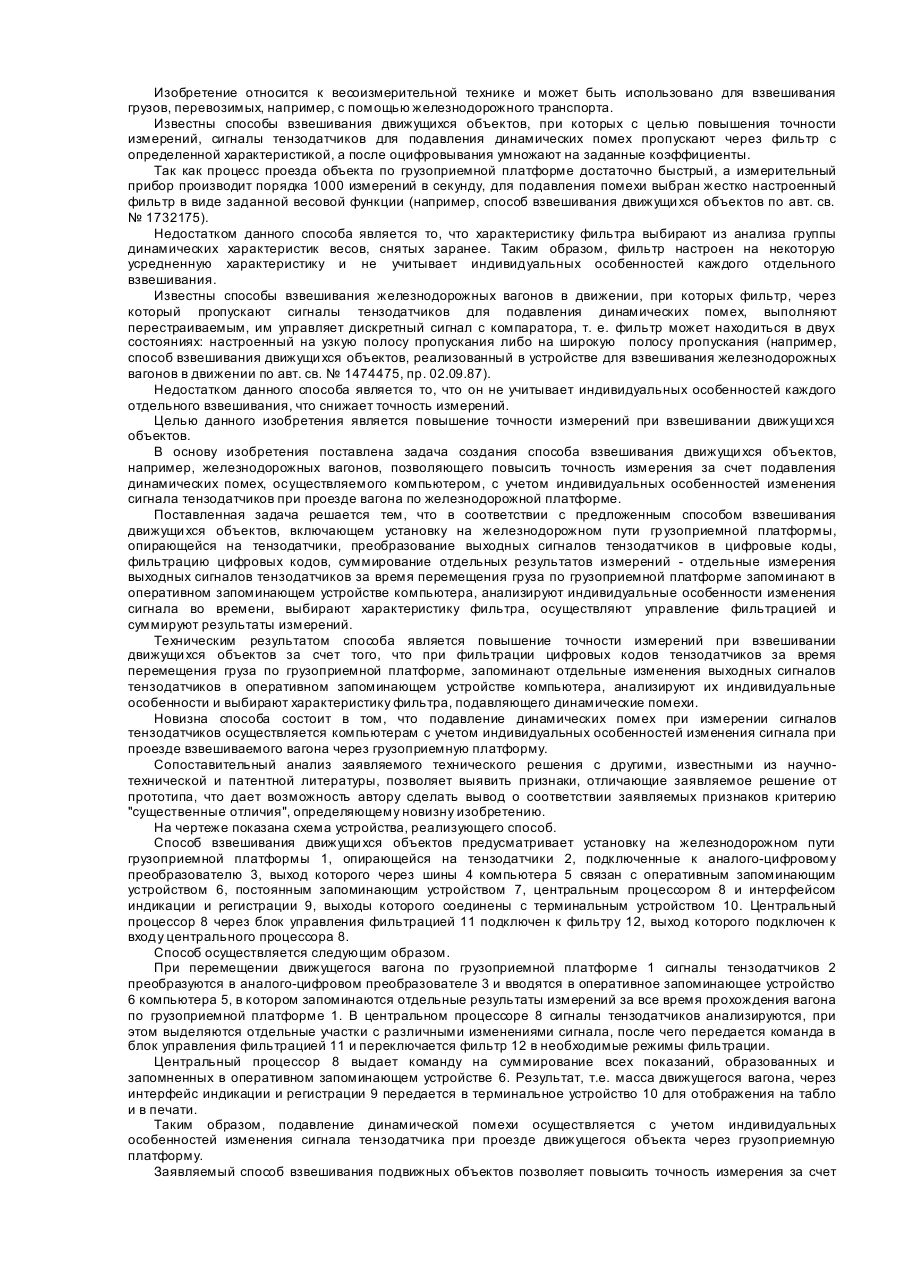
Спосіб зважування рухомих об`єктів
Номер патенту: 17600
Опубліковано: 06.05.1997
Автор: Дашевський Яків Тевелович
МПК: G01G 23/00, G01G 19/04
Мітки: об'єктів, зважування, рухомих, спосіб
Формула / Реферат:
Способ взвешивания движущихся объектов, включающий установку на железнодорожном пути грузоприемной платформы, опирающейся на тензодатчики, преобразование выходных сигналов тензодатчиков в цифровые коды, фильтрацию цифровых кодов, суммирование отдельных результатов измерений, отличающийся тем, что отдельные измерения выходных сигналов тензодатчиков за время перемещения груза по грузоприемной платформе запоминают в оперативном запоминающем...
Радіолокаційний імпульсний дальномір

Номер патенту: 17451
Опубліковано: 06.05.1997
Автори: Жуков Сергій Анатолійович, Родін Олександр Валерійович, Бахвалов Борис Миколайович
МПК: G01S 17/06
Мітки: радіолокаційний, імпульсний, дальномір
Формула / Реферат:
Радиолокационный импульсный дальномер, содержащий передатчик импульсных зондирующих сигналов с периодом следования T1 > 2rm/c, приемо-передающую антенну с антенным переключателем, приемник, синхронизатор и индикатор, отличающийся тем, что антенна, приемник и передатчик выполнены для несинусоидальных импульсных сигналов наносекундной длительности t без несущей частоты в виде периодической пачки n таких импульсов с периодом T1 и периодом...
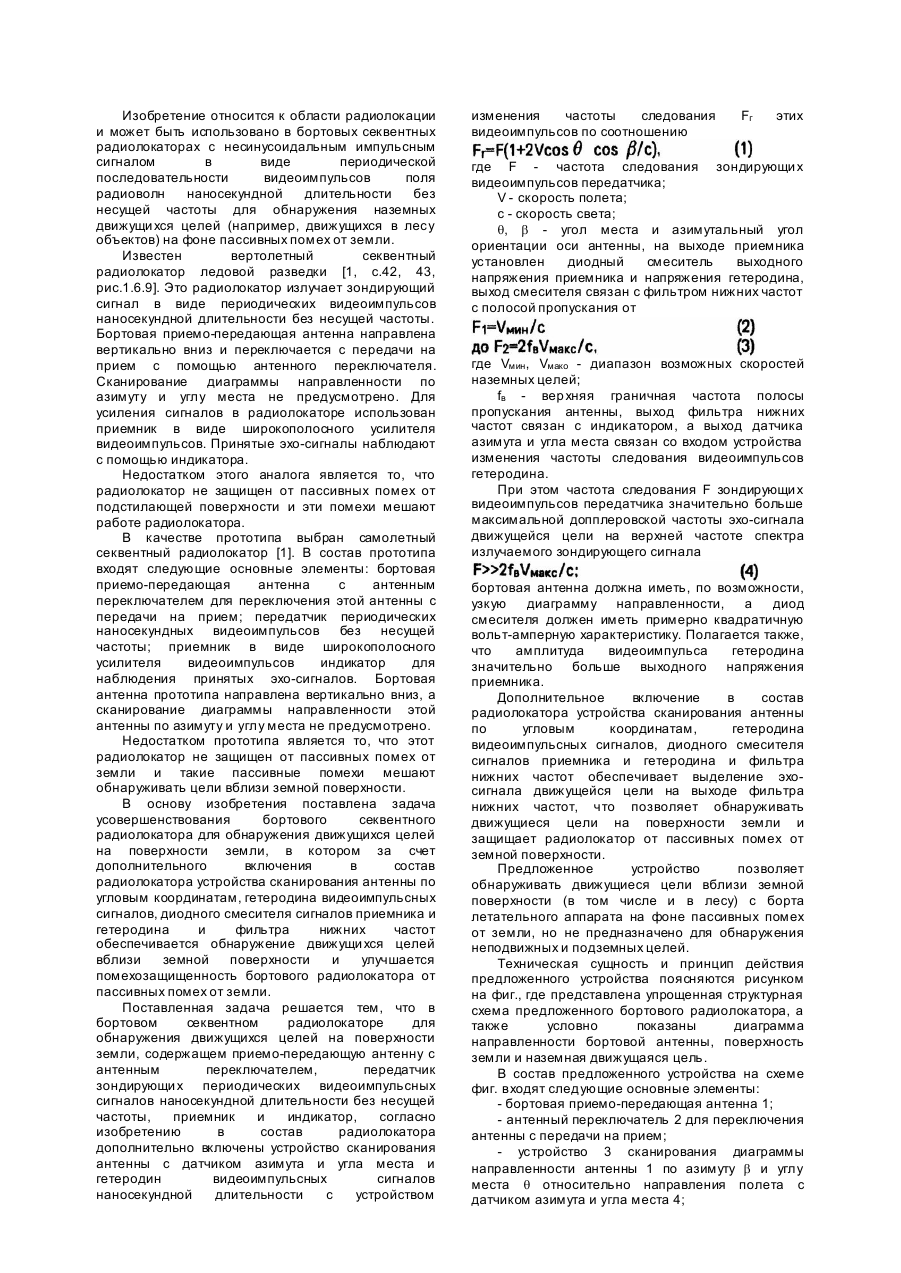
Бортовий секвентний радіолокатор для виявлення рухомих цілей на поверхні землі
Номер патенту: 17458
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 13/06
Мітки: землі, цілей, поверхні, бортовий, виявлення, рухомих, радіолокатор, секвентний
Формула / Реферат:
Бортовой секвентный радиолокатор для обнаружения движущихся целей на поверхности земли, содержащий приемо-передающую антенну с антенным переключателем, передатчик зондирующих периодических видеоимпульсных сигналов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что в состав радиолокатора дополнительно включены устройство сканирования антенны с датчиком азимута и угла места и гетеродин видеоимпульсных...
Попередній патент: Спосіб діагностики початкової стадії артеріальної недостатності нижніх кінцівок у металургів
Наступний патент: Спосіб лікування ішемічної хвороби серця у людей похилого віку
Випадковий патент: Сонячний опріснювач води