Спосіб визначення стану кріплення асинхронного двигуна до фундаментної плити
Номер патенту: 80683
Опубліковано: 10.06.2013
Автори: Перекрест Андрій Леонідович, Родькін Дмитро Йосипович, Гаврилець Галина Олегівна




Формула / Реферат
1. Спосіб визначення стану кріплення асинхронного двигуна до фундаментної плити, що полягає в підключенні двигуна до мережі, вимірюванні вібрацій двигуна в двох площинах, обробці параметрів вібрацій, який відрізняється тим, що додатково визначають параметри впливу на механічну систему (момент двигуна при пуску), визначають положення в просторі та здійснюють координатні перетворення сили, що породжує вібрацію і визначають її проекції на горизонтальну і вертикальну площини, визначають гармонійні складові моменту двигуна на інтервалі збільшення його до максимуму при пуску, визначають складові вібропараметрів у вертикальній і горизонтальній площинах, формують систему рівнянь енергетичного балансу для гармонік потужності вібраційного фону двигуна і механічної частини системи, визначають параметри кріплення двигуна шляхом розв'язку системи ідентифікаційних рівнянь енергетичного балансу.
2. Спосіб за п. 1, який відрізняється тим, що використовують пристрій, що забезпечено датчиком струму, момент двигуна визначають шляхом розрахунку миттєвої потужності на клемах двигуна з урахуванням миттєвої потужності на активному опорі статора та індуктивному опорі розсіювання.
3. Спосіб за п. 2, який відрізняється тим, що додатково складають схему ідентифікаційних рівнянь асинхронного двигуна, шляхом її рішення визначають параметри схеми заміщення асинхронного двигуна, залежність моменту двигуна від часу визначають розрахунковим шляхом з використанням отриманих параметрів.
Текст
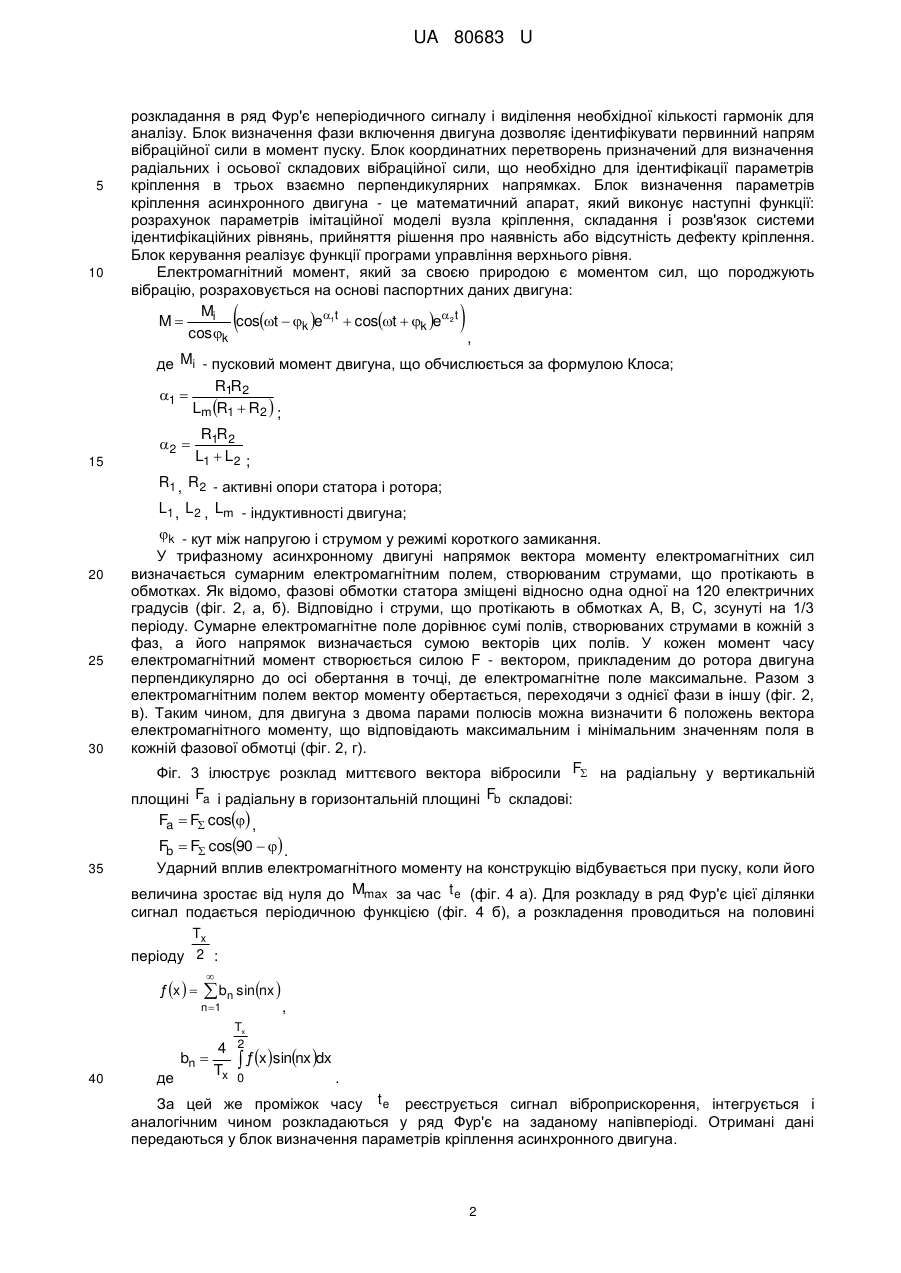
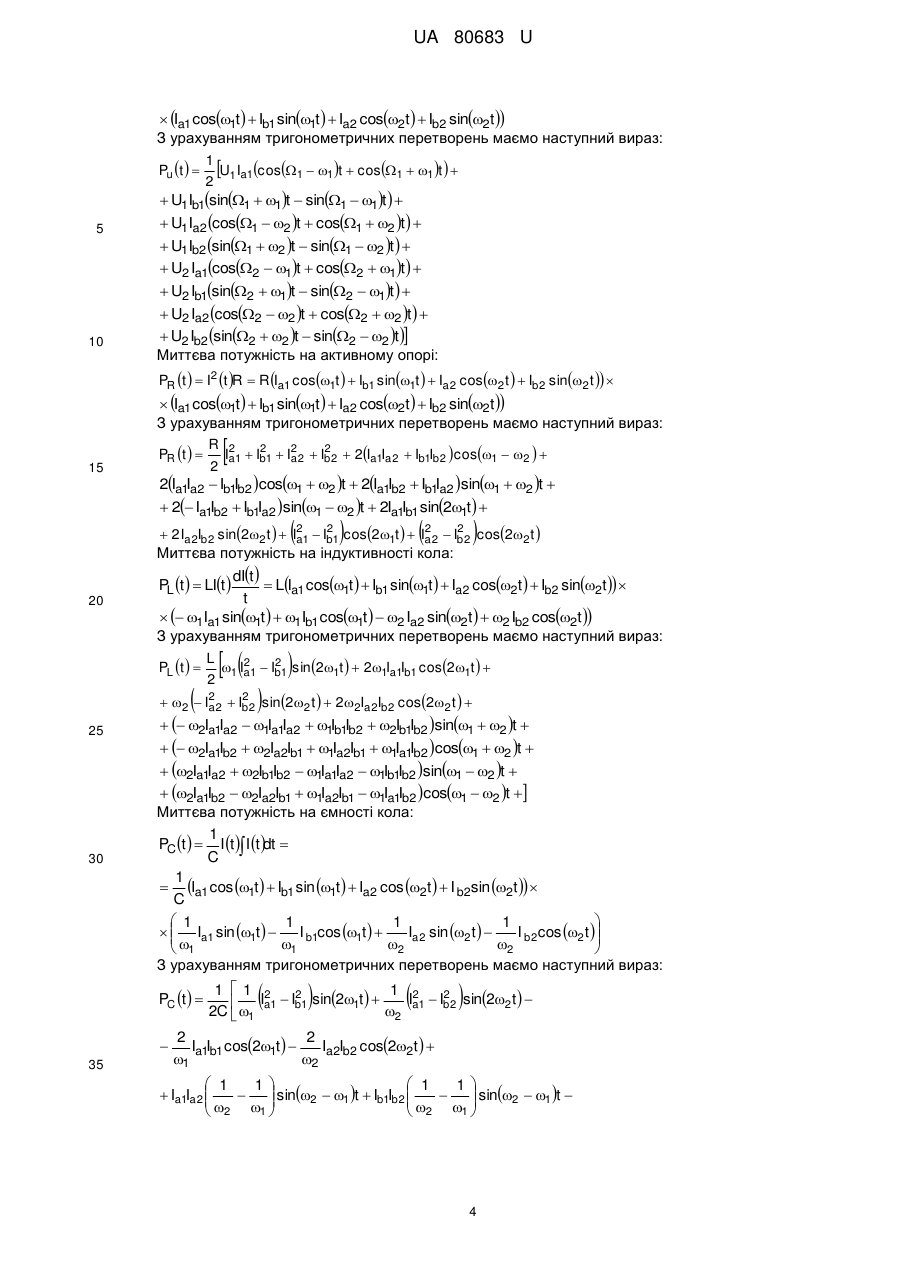
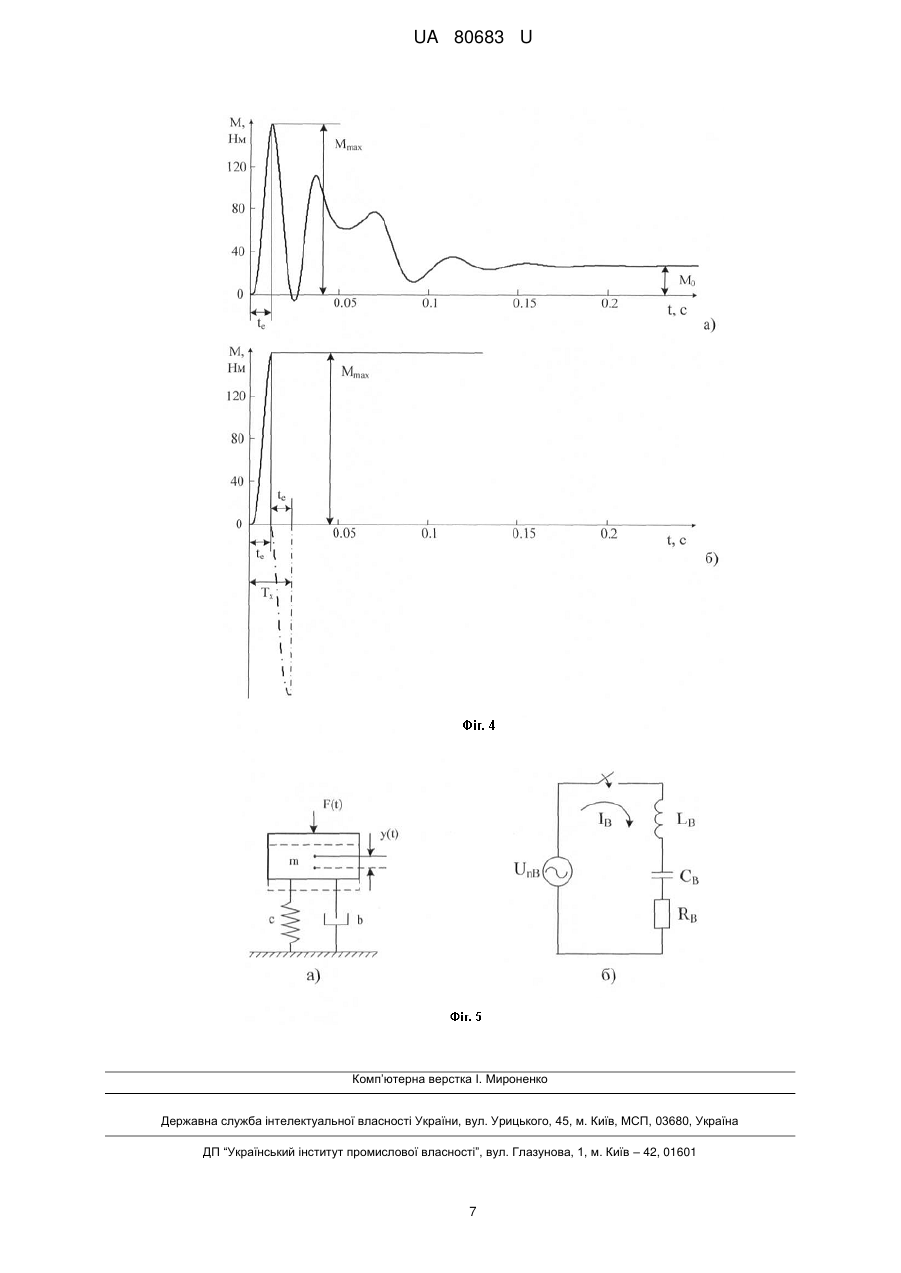
Реферат: Спосіб визначення стану кріплення асинхронного двигуна до фундаментної плити полягає в підключенні двигуна до мережі, вимірюванні вібрацій двигуна в двох площинах, обробці параметрів вібрацій. Додатково визначають параметри впливу на механічну систему (момент двигуна при пуску), визначають положення в просторі та здійснюють координатні перетворення сили, що породжує вібрацію і визначають її проекції на горизонтальну і вертикальну площини. Визначають гармонійні складові моменту двигуна на інтервалі збільшення його до максимуму при пуску, визначають складові вібропараметрів у вертикальній і горизонтальній площинах. Формують систему рівнянь енергетичного балансу для гармонік потужності вібраційного фону двигуна і механічної частини системи, визначають параметри кріплення двигуна шляхом розв'язку системи ідентифікаційних рівнянь енергетичного балансу. UA 80683 U (54) СПОСІБ ВИЗНАЧЕННЯ СТАНУ КРІПЛЕННЯ АСИНХРОННОГО ДВИГУНА ДО ФУНДАМЕНТНОЇ ПЛИТИ UA 80683 U UA 80683 U 55 Корисна модель належить до галузі вібродіагностики, зокрема до методів визначення дефектів асинхронних двигунів. Корисна модель може бути використана для задач визначення параметрів кріплення асинхронного двигуна до фундаментної плити, а також для задач визначення параметрів коливальних механічних систем. Відомий спосіб вібродіагностики електричних машин [Спосіб вібродіагностики технічного стану машини: А.С. № 21154 A: G01M 7/00 / В.М. Нагорний; 2002010490; опубліковано 15.11.2002, бюл. № 11/2002], за яким періодично, неодноразово вимірюється амплітуда коливань корпусу машини, потім усереднюється і апроксимується функцією, яка відображує фізику процесу зношування машини, визначається ресурс вузлів і вказується фізична природа їх дефектів. До недоліку зазначеного способу можна віднести неможливість визначення дефектів кріплень електричних машин до фундаментної основи, таких як ослаблення різьбових з'єднань, збільшення зазорів, просідання і тріщини фундаменту. Суттєві ознаки, що збігаються зі способом, що заявляється: - двигун підключають до джерела; - вимірюють вібрацію на корпусі; - обробляють результати вимірювань. Найбільш близьким технічним рішенням до корисної моделі, що заявляється, є спосіб вібраційної діагностики технічного стану електричних машин [Спосіб вібраційної діагностики технічного стану роторних машин: А.С. № 5886 А: G01M 7/00, F01C 1/00 / О.Є. Божко; В.І. Бєлих; О.Ф. Поліщук; 4229335/SU; опубліковано 29.12.1994, бюл. № 8/94], по якому виміряні у відомому проміжку часу значення вібропараметрів додають, виділяють постійну і змінну складові, виділяють максимальне значення постійної складової, за яким оцінюють величину коливань на частоті першої гармоніки обертання ротора, а за параметрами змінної складової судять про види та величини дефектів. До недоліків наведеного способу, основаного на спектральному аналізі вібрації можна віднести: - відсутність нормативної бази і загальноприйнятих рекомендацій щодо процесу аналізу даних і постановки діагнозу; - високу ймовірність неправильної постановки діагнозу, оскільки для різних дефектів спектральний аналіз може давати однакові результати. Суттєві ознаки, що збігаються із способом, що заявляється: - вимірюють вібрацію на корпусі - розкладають вібросигнал в ряд Фур'є - визначають величину зміни жорстокості у конструкції. Наведений спосіб приймається за прототип. В основу корисної моделі поставлено задачу визначення параметрів кріплення асинхронного двигуна до фундаментної плити, таких як жорсткість і демпфування. Поставлена задача вирішується тим, що асинхронний двигун підключають до мережі, вимірюють його вібрації в двох площинах, визначають момент двигуна при пуску, визначають положення в просторі сили, що обурює, що діє на двигун, здійснюють координатні перетворення сили, що обурює і визначають її проекції на горизонтальну і вертикальну площині, визначають гармонійні складові моменту двигуна на інтервалі збільшення його до максимуму при пуску, формують систему рівнянь енергетичного балансу для гармонік потужності вібраційного фону двигуна і механічної частини системи, визначають параметри кріплення двигуна шляхом вирішення системи ідентифікаційних рівнянь енергетичного балансу. Реалізація запропонованого способу ілюструється фіг. 1, в якій прийняті позначення: 1 асинхронний двигун, жорстко закріплений на фундаменті анкерними болтами; 2 - блок датчиків напруги і струму; 3 - керований комутатор силового ланцюга; 4 - блок датчиків вібрації; 5 - блок визначення моменту; 6 - блок аналізу вібропараметрів; 7 - блок аналізу електромагнітного моменту; 8 - блок визначення фази включення двигуна; 9 - блок координатних перетворень; 10 блок визначення параметрів кріплення асинхронного двигуна; 11 - блок керування. Для випробовуваного двигуна реалізуються такі режими роботи: прямий пуск, робота на холостому ходу, самогальмування. Датчики напруги та струму типові, трансформаторні, , , розраховані на напругу Umax 12 Un та струм Imax 16 In , де Un , In - номінальні напруга і струм 60 двигуна. Як датчики вібрації використовуються акселерометри з робочою частотою до 4800 Гц. Сигнал електромагнітного моменту розраховується на підставі паспортних даних двигуна або визначається шляхом моделювання. Блок аналізу вібропараметрів являє собою математичний апарат, який реалізує функції інтегрування віброприскорення, фільтрації і спектрального аналізу. Блок аналізу електромагнітного моменту являє собою математичний апарат 5 10 15 20 25 30 35 40 45 50 1 UA 80683 U 5 10 розкладання в ряд Фур'є неперіодичного сигналу і виділення необхідної кількості гармонік для аналізу. Блок визначення фази включення двигуна дозволяє ідентифікувати первинний напрям вібраційної сили в момент пуску. Блок координатних перетворень призначений для визначення радіальних і осьової складових вібраційної сили, що необхідно для ідентифікації параметрів кріплення в трьох взаємно перпендикулярних напрямках. Блок визначення параметрів кріплення асинхронного двигуна - це математичний апарат, який виконує наступні функції: розрахунок параметрів імітаційної моделі вузла кріплення, складання і розв'язок системи ідентифікаційних рівнянь, прийняття рішення про наявність або відсутність дефекту кріплення. Блок керування реалізує функції програми управління верхнього рівня. Електромагнітний момент, який за своєю природою є моментом сил, що породжують вібрацію, розраховується на основі паспортних даних двигуна: Mi M cost k e1t cost k e2 t cos k , де Mi - пусковий момент двигуна, що обчислюється за формулою Клоса; R1R2 1 Lm R1 R2 ; R1R 2 L1 L 2 ; R1 , R 2 - активні опори статора і ротора; L1 , L 2 , Lm - індуктивності двигуна; 2 15 20 25 30 k - кут між напругою і струмом у режимі короткого замикання. У трифазному асинхронному двигуні напрямок вектора моменту електромагнітних сил визначається сумарним електромагнітним полем, створюваним струмами, що протікають в обмотках. Як відомо, фазові обмотки статора зміщені відносно одна одної на 120 електричних градусів (фіг. 2, а, б). Відповідно і струми, що протікають в обмотках А, В, С, зсунуті на 1/3 періоду. Сумарне електромагнітне поле дорівнює сумі полів, створюваних струмами в кожній з фаз, а його напрямок визначається сумою векторів цих полів. У кожен момент часу електромагнітний момент створюється силою F - вектором, прикладеним до ротора двигуна перпендикулярно до осі обертання в точці, де електромагнітне поле максимальне. Разом з електромагнітним полем вектор моменту обертається, переходячи з однієї фази в іншу (фіг. 2, в). Таким чином, для двигуна з двома парами полюсів можна визначити 6 положень вектора електромагнітного моменту, що відповідають максимальним і мінімальним значенням поля в кожній фазової обмотці (фіг. 2, г). Фіг. 3 ілюструє розклад миттєвого вектора вібросили F на радіальну у вертикальній площині Fa і радіальну в горизонтальній площині Fb складові: Fa F cos , 35 Fb F cos90 . Ударний вплив електромагнітного моменту на конструкцію відбувається при пуску, коли його величина зростає від нуля до Mmax за час t e (фіг. 4 а). Для розкладу в ряд Фур'є цієї ділянки сигнал подається періодичною функцією (фіг. 4 б), а розкладення проводиться на половині Tx періоду 2 : ƒ x bn sinnx n1 bn 40 де 4 Tx , Tx 2 ƒx sinnx dx 0 . За цей же проміжок часу t e реєструється сигнал віброприскорення, інтегрується і аналогічним чином розкладаються у ряд Фур'є на заданому напівперіоді. Отримані дані передаються у блок визначення параметрів кріплення асинхронного двигуна. 2 UA 80683 U 5 На основі прикладної теорії коливань і електромеханічних аналогій пропонується розглядати механічну коливальну систему, що складається із маси, закріпленої на жорсткій поверхні в одній точці з жорсткістю с. Властивості матеріалу кріплення поглинати коливання характеризуються коефіцієнтом b (фіг. 5, а). Така система може бути описана диференціальним рівнянням 2-го порядку: dy t cyt Ft dt dt , де m - маса механізму; c - сумарна жорсткість віброізоляторів; b - механічний опір, що визначає активні втрати коливальної енергії; m 10 d2yt 2 b yt - зміщення інерційного елемента від положення рівноваги; m d2 yt dt 2 - інерційні сили; dyt dt - сили тертя; cyt - сили пружності; b 15 Ft F0 cost - сила, що породжує коливання. Даний процес, що відбувається у механічній системі, може бути описаний диференціальним рівнянням електромагнітних коливань у RLC-колі (фіг. 5, б): L d2it dt L 2 R dit 1 it ut dt C , d2it dt 2 - падіння напруги на клемах котушки індуктивності; де dit R dt - падіння напруги на активному опорі; 20 25 30 35 40 1 it C - падіння напруги на конденсаторі. Таким чином, електричне коло є схемою заміщення механічної системи кріплення АД до фундаменту (фіг. 5, б). Згідно з теорією електромеханічних аналогій, інерційність механічної коливальної системи відповідає індуктивності кола; жорсткість віброізоляторів обернено пропорційна ємності кола; механічний опір відповідає активному опору кола; сила, що породжує коливання - е.р.с ланцюга, зміщення інерційного елемента від положення рівноваги відповідає кількості електрики, а віброшвидкості - електричний струм. Таким чином, задача визначення параметрів кріплення зводиться до визначення параметрів електричного кола, в якому джерелом е.р.с. є електромагнітний момент двигуна, а контурним струмом - сигнал віброшвидкості. Запропонований спосіб визначення параметрів кріплення реалізується шляхом використання рівнянь енергетичного балансу складових миттєвої потужності для елементів RLC-кола. Рівняння енергетичного балансу складаються за схемою заміщення механічної системи з використанням кінцевого числа гармонік. При використанні N гармонік струму і напруги можуть бути отримані 2N+1 ідентифікаційних рівнянь. Для задачі визначення трьох невідомих параметрів достатнім є використання двох гармонік сигналів напруги та струму: ut U1 cos1t U2 cos2t i t I1 cos1t 1 I2 cos2t 2 Ia1 cos1t Ib1 sin1t Ia2 cos2t Ib2 sin2t Частоти гармонік напруги 1 , 2 та струму 1 , 2 пов'язані між собою коефіцієнтами кратності так, що 2 k11 , 2 k 21 , 1 k31 . Для складання системи ідентифікаційних рівнянь визначається миттєва потужність джерела напруги і миттєва потужність на кожному із елементів кола. Миттєва потужність джерела напруги визначається наступним чином: Pu t Ut I t U1 cos1t U2 cos2t 3 UA 80683 U Ia1 cos1t Ib1 sin1t Ia2 cos2t Ib2 sin2t З урахуванням тригонометричних перетворень маємо наступний вираз: 1 Pu t U1 Ia1cos1 1t cos1 1t 2 U1Ib1sin1 1t sin1 1t 5 10 U1Ia2 cos1 2 t cos1 2 t U1Ib2 sin1 2 t sin1 2 t U2 Ia1cos2 1t cos2 1t U2 Ib1sin2 1t sin2 1t U2 Ia2 cos2 2 t cos2 2 t U2 Ib2 sin2 2 t sin2 2 t Миттєва потужність на активному опорі: PR t I2 t R RIa1 cos1t Ib1 sin1t Ia2 cos2 t Ib2 sin2 t 15 Ia1 cos1t Ib1 sin1t Ia2 cos2t Ib2 sin2t З урахуванням тригонометричних перетворень маємо наступний вираз: R 2 2 2 2 PR t Ia1 Ib1 Ia 2 Ib2 2Ia1Ia 2 Ib1Ib2 cos1 2 2 2Ia1Ia2 Ib1Ib2 cos1 2 t 2Ia1Ib2 Ib1Ia2 sin1 2 t 2 Ia1Ib2 Ib1Ia2 sin1 2 t 2Ia1Ib1 sin21t 20 25 30 2 2 2 Ia2 Ib2 sin22 t 22Ia2Ib2 cos22 t 2Ia1Ia2 1Ia1Ia2 1Ib1Ib2 2Ib1Ib2 sin1 2 t 2Ia1Ib2 2Ia2Ib1 1Ia2Ib1 1Ia1Ib2 cos1 2 t 2Ia1Ia2 2Ib1Ib2 1Ia1Ia2 1Ib1Ib2 sin1 2 t 2Ia1Ib2 2Ia2Ib1 1Ia2Ib1 1Ia1Ib2 cos1 2 t Миттєва потужність на ємності кола: 1 PC t I t I t dt C 1 Ia1 cos 1t Ib1 sin 1t Ia2 cos 2t I b2sin 2t C 1 1 1 1 Ia1 sin 1t I b1cos 1t Ia2 sin 2 t I b2cos 2 t 1 2 2 1 З урахуванням тригонометричних перетворень маємо наступний вираз: PC t 35 2 2 2 2 2Ia2Ib2 sin22t Ia1 Ib1 cos21t Ia2 Ib2 cos22t Миттєва потужність на індуктивності кола: dIt PL t LIt LIa1 cos1t Ib1 sin1t Ia2 cos2t Ib2 sin2t t 1Ia1 sin1t 1Ib1 cos1t 2 Ia2 sin2t 2 Ib2 cos2t З урахуванням тригонометричних перетворень маємо наступний вираз: L 2 2 PL t 1 Ia1 Ib1 sin21t 21Ia1Ib1 cos21t 2 1 1 2 1 2 2 2 Ia1 Ib1 sin21t Ia1 Ib2 sin22 t 2C 1 2 2 2 Ia1Ib1 cos21t Ia2Ib2 cos22t 1 2 1 1 1 1 Ia1Ia 2 sin2 1t Ib1Ib2 sin2 1t 1 1 2 2 4 UA 80683 U 1 1 1 1 Ia1Ib2 cos2 1t Ib1Ia2 cos2 1t 1 1 2 2 5 1 1 1 1 Ia1Ib2 cos2 1t Ib1Ia 2 cos2 1t 2 2 1 1 Оскільки кратність частот гармонік напруги та струму відома, після спрощення виразів для миттєвої потужності на елементах кола та джерелі напруги записується рівняння балансу миттєвої потужності: 10 P0u P0R ; Pkan PкaR PкaL PкaC ; P P кbR PкbL PкbC . kbn Розв'язком даної системи рівнянь будуть невідомі параметри електричного кола - опір, індуктивність та ємність. Виконавши зворотне електромеханічне перетворення, отримуємо шукані параметри механічної коливальної системи - її масу, жорсткість кріплення та коефіцієнт демпфування вібрації. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 30 1. Спосіб визначення стану кріплення асинхронного двигуна до фундаментної плити, що полягає в підключенні двигуна до мережі, вимірюванні вібрацій двигуна в двох площинах, обробці параметрів вібрацій, який відрізняється тим, що додатково визначають параметри впливу на механічну систему (момент двигуна при пуску), визначають положення в просторі та здійснюють координатні перетворення сили, що породжує вібрацію і визначають її проекції на горизонтальну і вертикальну площини, визначають гармонійні складові моменту двигуна на інтервалі збільшення його до максимуму при пуску, визначають складові вібропараметрів у вертикальній і горизонтальній площинах, формують систему рівнянь енергетичного балансу для гармонік потужності вібраційного фону двигуна і механічної частини системи, визначають параметри кріплення двигуна шляхом розв'язку системи ідентифікаційних рівнянь енергетичного балансу. 2. Спосіб за п. 1, який відрізняється тим, що використовують пристрій, що забезпечено датчиком струму, момент двигуна визначають шляхом розрахунку миттєвої потужності на клемах двигуна з урахуванням миттєвої потужності на активному опорі статора та індуктивному опорі розсіювання. 3. Спосіб за п. 2, який відрізняється тим, що додатково складають схему ідентифікаційних рівнянь асинхронного двигуна, шляхом її рішення визначають параметри схеми заміщення асинхронного двигуна, залежність моменту двигуна від часу визначають розрахунковим шляхом з використанням отриманих параметрів. 5 UA 80683 U 6 UA 80683 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of state of fixation of asynchronous motor to base plate
Автори англійськоюHavrylets Halyna Olehivna, Perekrest Andrii Leonidovych, Rodkin Dmytro Yosypovych
Назва патенту російськоюСпособ определения состояния крепления асинхронного двигателя к фундаментной плите
Автори російськоюГаврилец Галина Олеговна, Перекрест Андрей Леонидович, Родькин Дмитрий Иосифович
МПК / Мітки
МПК: G01M 15/05
Мітки: визначення, спосіб, двигуна, асинхронного, плити, кріплення, фундаментної, стану
Код посилання
<a href="https://ua.patents.su/9-80683-sposib-viznachennya-stanu-kriplennya-asinkhronnogo-dviguna-do-fundamentno-pliti.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення стану кріплення асинхронного двигуна до фундаментної плити</a>
Спосіб визначення моменту трифазного асинхронного двигуна з короткозамкненим ротором
Номер патенту: 61511
Опубліковано: 25.07.2011
Автори: Квашнін Валерій Олегович, Мусієнко Юлія Миколаївна
МПК: G01L 3/10
Мітки: ротором, моменту, трифазного, короткозамкненим, спосіб, асинхронного, визначення, двигуна
Формула / Реферат:
Спосіб визначення моменту трифазного асинхронного двигуна з короткозамкненим ротором, який полягає в тому, що визначення моменту трифазного асинхронного двигуна відбувається за електричними координатами двигуна, що визначаються датчиками (фазні напруги статора UА, UВ, UС та фазні струми іА, іВ, іС), момент обчислюється у мікроконтролері та подається на керуючий елемент, який відрізняється тим, що створюється математична модель трифазного...
Спосіб визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючих складових струму статора асинхронного двигуна
Номер патенту: 48510
Опубліковано: 25.03.2010
Автори: Урдін Ігор Володимирович, Топчієнко Юрій Анатолійович, Козакевич Ігор Аркадійович, Воробейчик Олег Станіславович
МПК: H02K 15/00
Мітки: потокозчеплення, складових, вектора, положення, значень, двигуна, намагнічуючих, ідентифікатора, визначення, спосіб, статора, асинхронного, ротора, активної, струму
Формула / Реферат:
Спосіб визначення ідентифікатора положення вектора потокозчеплення ротора, значень активної та намагнічуючих складових струму статора асинхронного двигуна, що включаєреєстрацію реально діючих сигналів у режимах робочого функціонування асинхронного двигуна й наступну обробку зареєстрованих сигналів, який відрізняється тим, що як реально діючі в асинхронному двигуні сигнали використовують поточні значення фазних струмів, при цьому...
Пристрій для визначення місця та ступеня пошкодження стрижнів ”білячої клітки” ротора асинхронного двигуна із закритими пазами
Номер патенту: 59569
Опубліковано: 25.05.2011
Автори: Мирошников Вадим Володимирович, Победа Тетяна Валеріївна
МПК: G01R 31/06
Мітки: білячої, стрижнів, ступеня, пошкодження, клітки, двигуна, місця, ротора, пазами, закритими, асинхронного, пристрій, визначення
Формула / Реферат:
Пристрій для визначення місця та ступеня пошкодження стрижнів "білячої клітки" ротора асинхронного двигуна із закритими пазами, що містить намагнічуючий ланцюг, виконаний у вигляді П-подібного магнітопроводу, та вимірювальний ланцюг, який містить датчик Холла, шунт, міліамперметр, який відрізняється тим, що у вимірювальному ланцюзі як датчик Холла застосовано ферозонд, який працює на другій гармоніці та розташований між полюсами...
Спосіб пуску асинхронного двигуна
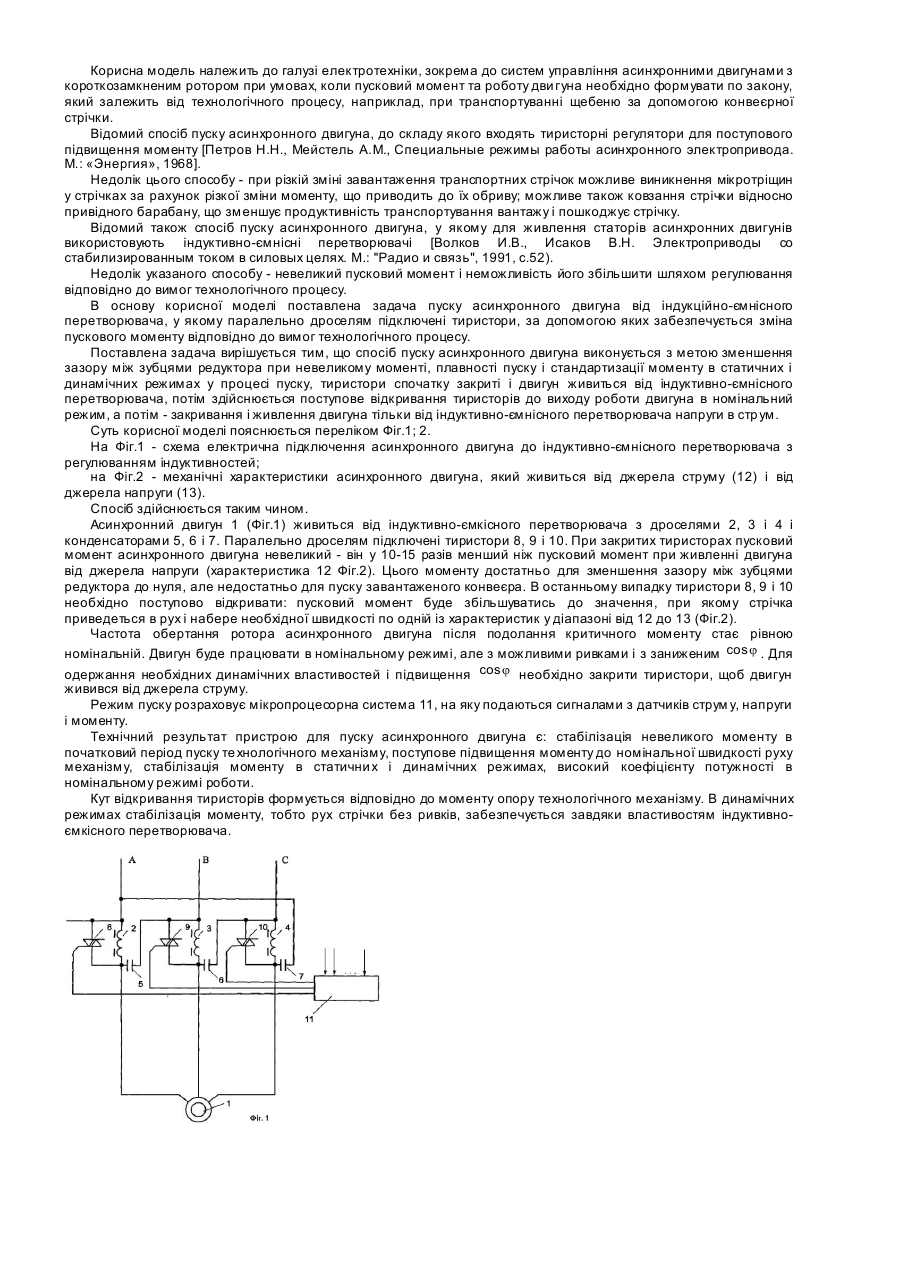
Номер патенту: 8075
Опубліковано: 15.07.2005
Автори: Некрасов Андрій Вікторович, Решетняк Анатолій Володимирович
МПК: H02P 1/00
Мітки: спосіб, асинхронного, пуску, двигуна
Формула / Реферат:
Спосіб пуску та живлення асинхронного двигуна з короткозамкненим ротором, який полягає в підключенні обмоток статора двигуна до трифазної мережі через індуктивно-ємнісний перетворювач, у якому паралельно дроселям включені тиристори, і в контролі процесу запуску у функції моменту або струму, який відрізняється тим, що для зменшення зазору між зубцями редуктора при невеликому моменті, плавності пуску і стандартизації моменту в статичних і...
Пристрій підключення живлення асинхронного двигуна
Номер патенту: 36949
Опубліковано: 10.11.2008
Автори: Гавріш Віктор Григорович, Іванов Віктор Олексійович, Юр'єв Олексій Семенович
Мітки: двигуна, пристрій, підключення, живлення, асинхронного
Формула / Реферат:
1. Пристрій підключення живлення асинхронного двигуна, який складається з корпуса і клемників з'єднання виводів двигуна, нерухомо закріплених у корпусі з можливістю підключення асинхронного двигуна до зовнішнього електричного кола, який відрізняється тим, що корпус пристрою виконаний із пресованого ізоляційного матеріалу, а до складу пристрою додатково введені подвійні кріпильні елементи підведення фаз живильної напруги до двигуна.2....
Попередній патент: Спосіб урахування насичення асинхронного двигуна в системі векторного керування
Наступний патент: Стандартний зразок для калібрування растрового електронного мікроскопа
Випадковий патент: Спосіб діагностики тяжкості гострого панкреатиту