Магніточутливий зонд
Номер патенту: 92384
Опубліковано: 25.10.2010
Автори: Павлик Любомир Пилипович, Хрістофороу Евангелос, Убізський Сергій Борисович
Формула / Реферат
Магніточутливий зонд, який складається з першого чутливого елемента у вигляді тонкої плівки магнітом'якого матеріалу, розміщеного у першій парі намагнічуючих котушок з ортогональними осями х та у, виконаної з можливістю створення магнітного поля, що обертається у площині ху, та у першій вимірювальній котушці з віссю, орієнтованою в напрямку x або у, а також з другого чутливого елемента, ідентичного першому чутливому елементу, розміщеного в другій парі намагнічуючих котушок, ідентичній першій парі намагнічуючих котушок, та другій вимірювальній котушці, ідентичній першій вимірювальній котушці, причому усі другі котушки орієнтовані своїми осями ідентично до відповідних перших котушок, який відрізняється тим, що друга вимірювальна котушка з'єднана з першою вимірювальною котушкою через пристрій комутації вимірювальних котушок, що виконаний з можливістю зміни напрямку під'єднання другої вимірювальної котушки до першої, кожна з другої пари намагнічуючих котушок другого чутливого елемента під'єднана до джерела змінного струму через пристрій комутації намагнічуючих котушок, виконаний із забезпеченням можливості зміни напрямку струму в кожній з другої пари намагнічуючих котушок на протилежний по відношенню до напрямку струму у відповідній котушці першої пари намагнічуючих котушок, другий чутливий елемент зонда розміщений на відстані вздовж кожної з осей x, у та z, що попарно ортогональні одна до одної, і обидва чутливі елементи орієнтовані відносно відповідної пари намагнічуючих котушок та між собою відповідно до магнітної анізотропії матеріалу чутливих елементів.
Текст
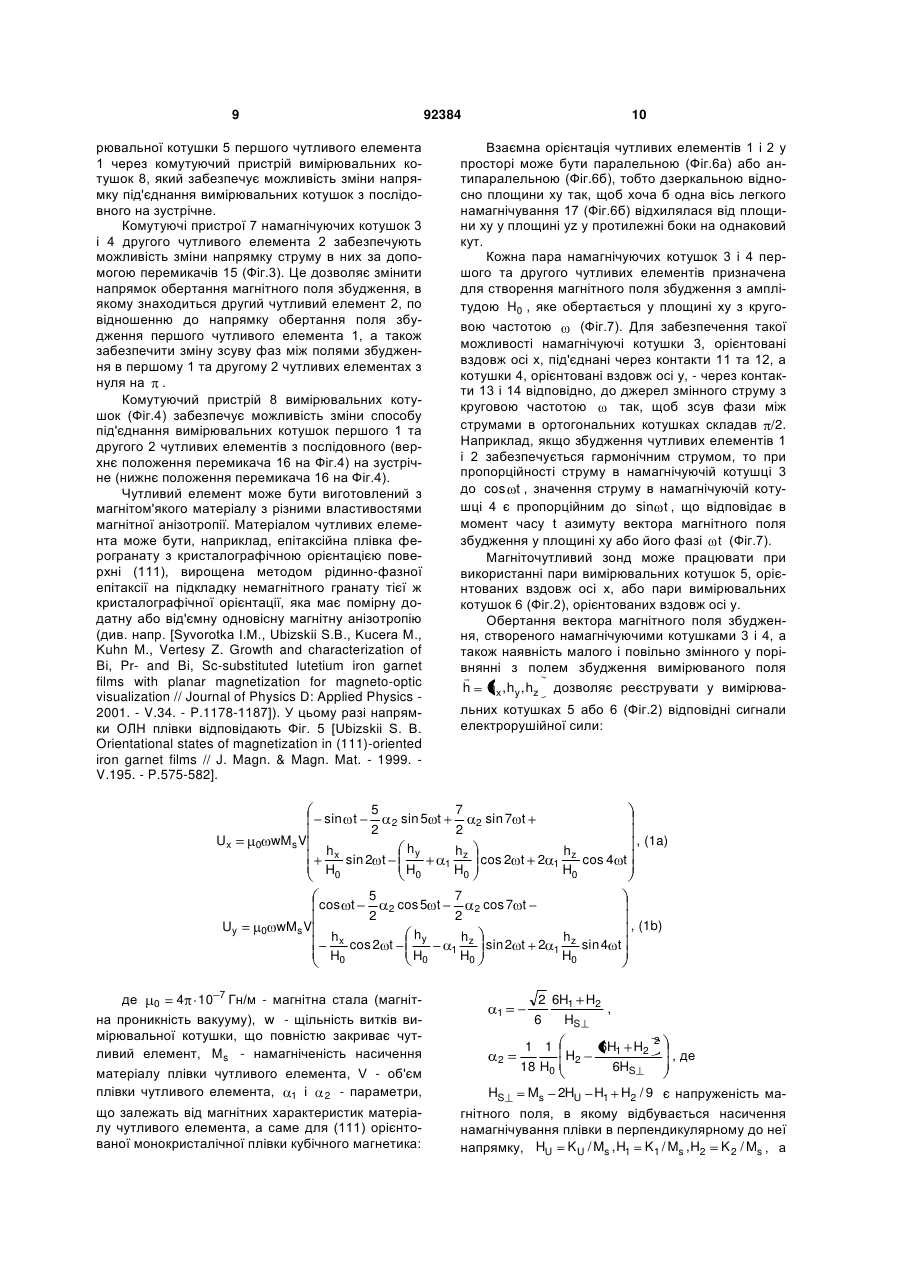
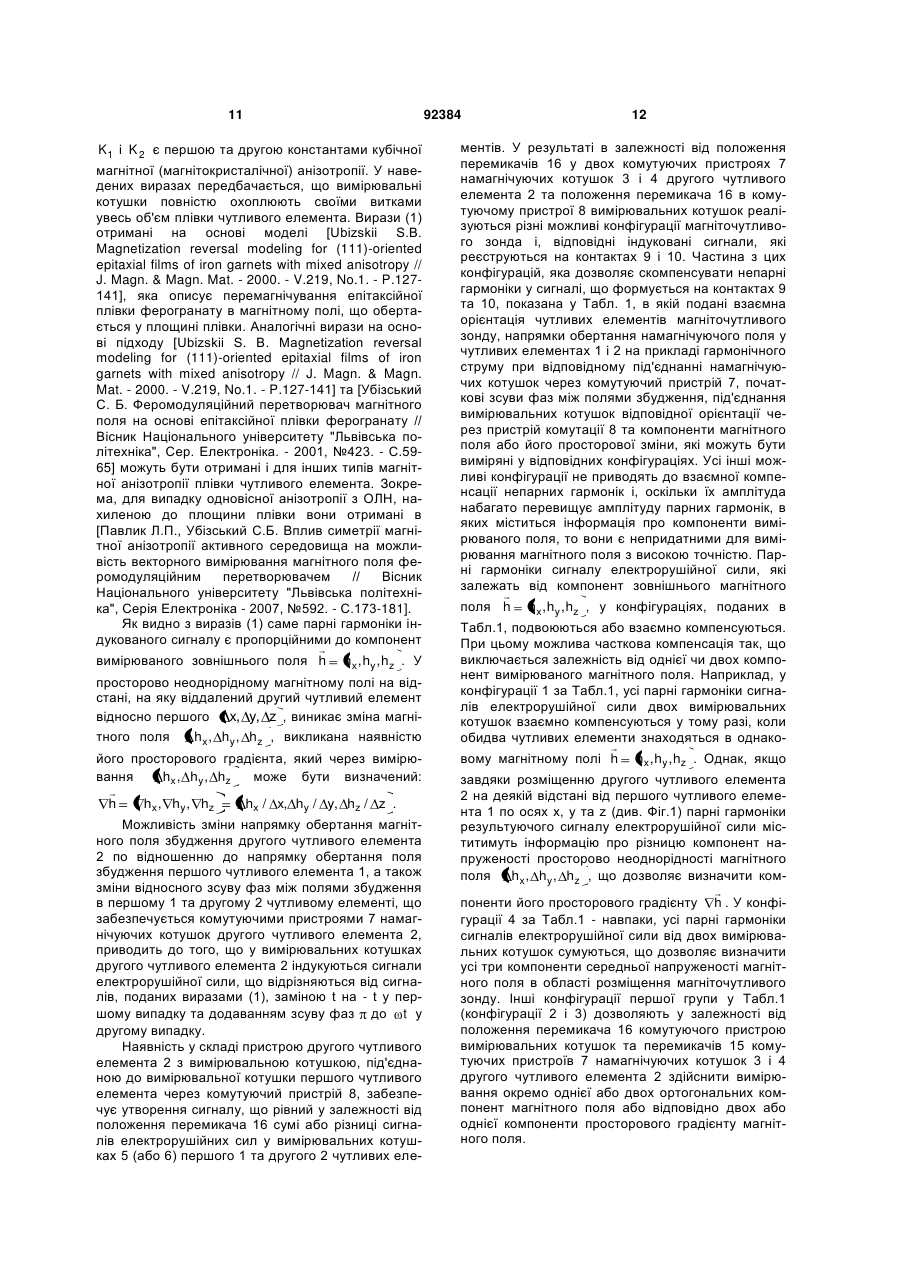
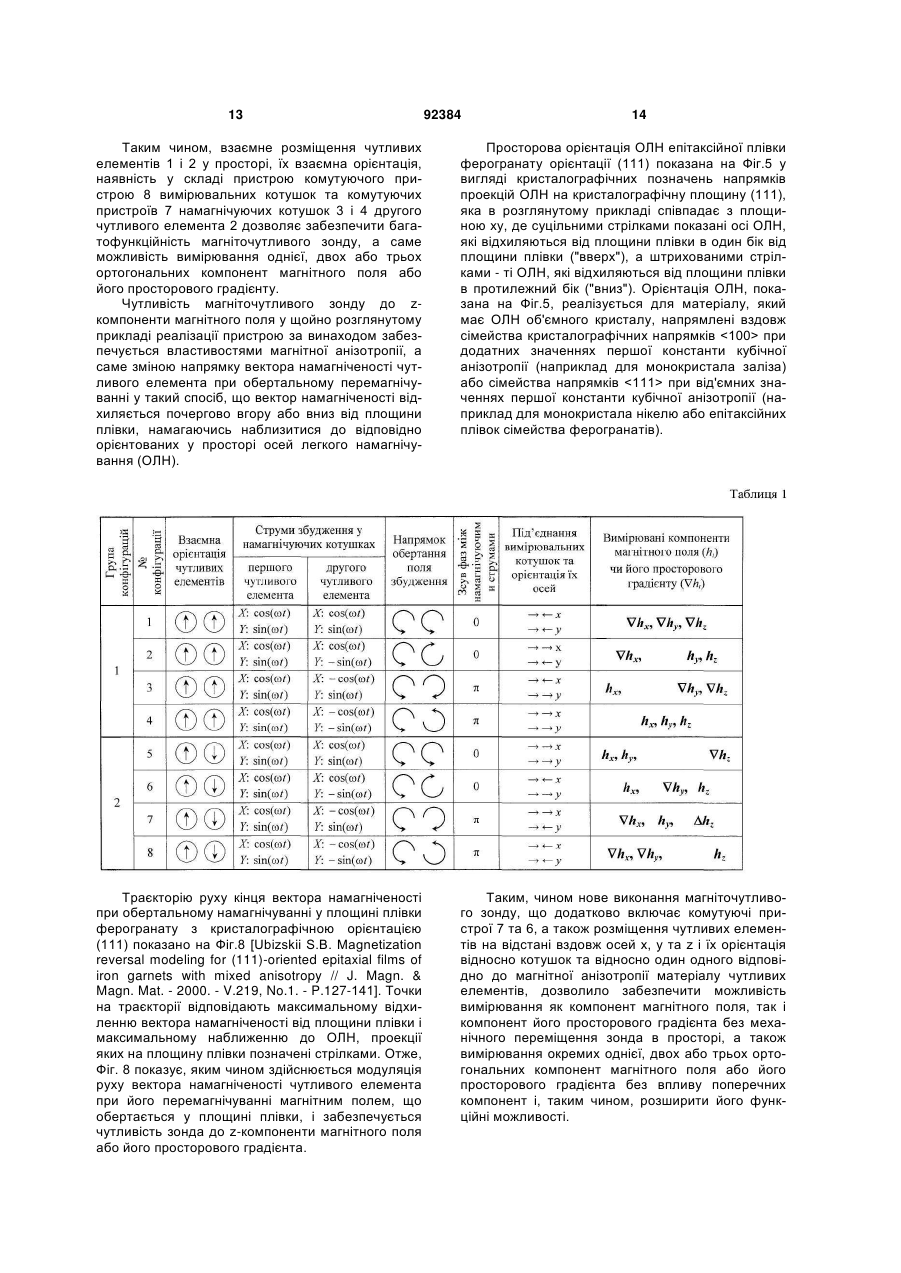
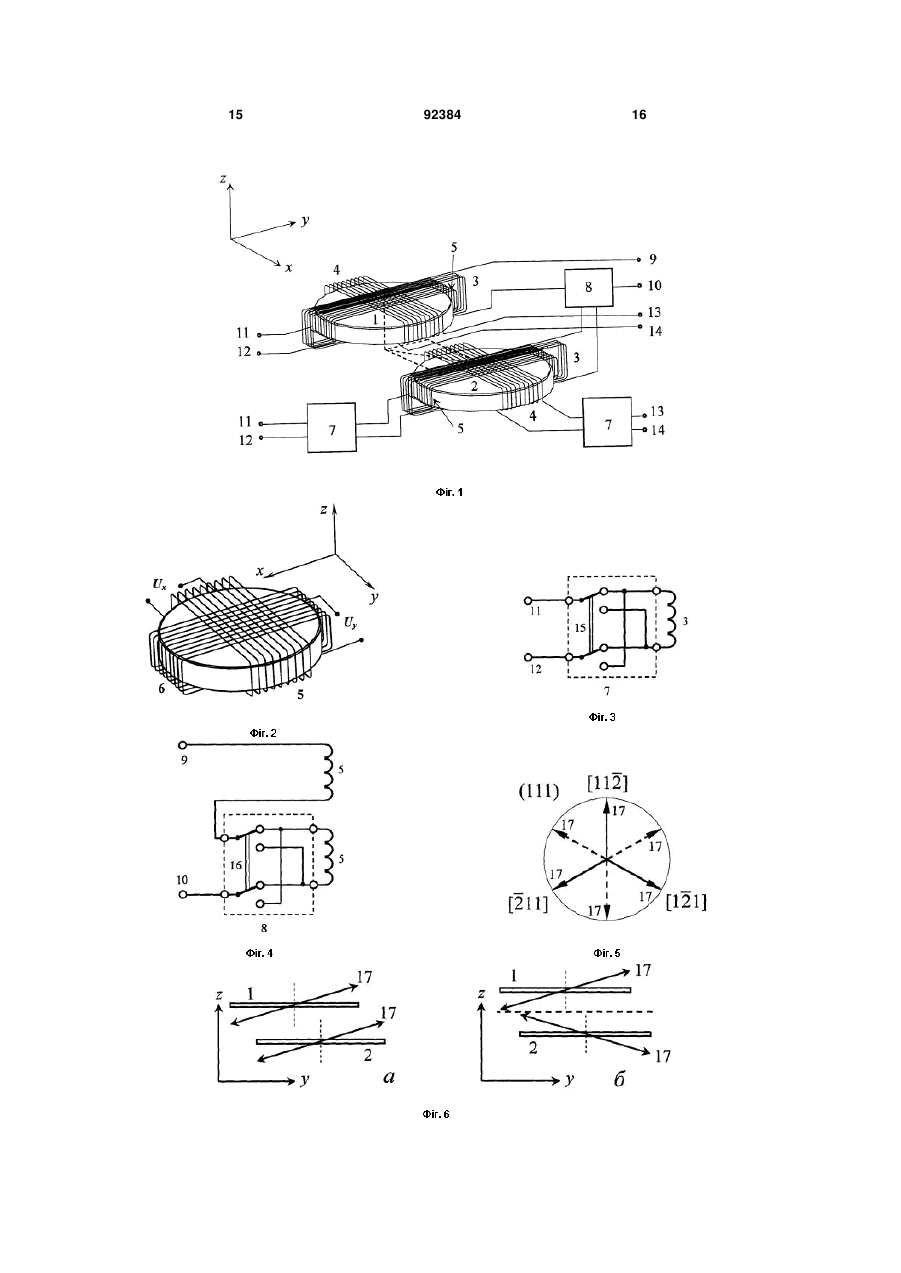
Магніточутливий зонд, який складається з першого чутливого елемента у вигляді тонкої плівки магнітом'якого матеріалу, розміщеного у першій парі намагнічуючих котушок з ортогональними осями х та у, виконаної з можливістю створення магнітного поля, що обертається у площині ху, та у першій вимірювальній котушці з віссю, орієнтованою в напрямку x або у, а також з другого чутливо C2 2 (19) 1 3 ванні об'єктів, які спотворюють оточуюче магнітне поле, а також у багатьох задачах наукових досліджень. У більшості практичних задач необхідне вимірювання магнітного поля як векторної величини, що потребує вимірювання окремих ортогональних компонент магнітного поля. Окрім цього, для виявлення збурень магнітного поля внесених сторонніми неоднорідностями важливу інформацію несе не лише величина компонент магнітного поля, але й його просторового градієнту. Ферозондові магнітометри використовують нелінійність залежності намагніченості феро- чи феримагнітного активного середовища чутливого елемента від прикладеного магнітного поля. Чутливість до зовнішнього магнітного поля досягається шляхом додаткової модуляції магнітної сприйнятливості чутливого елемента, який зазнає збудження періодичним магнітним полем, створеним спеціальною намагнічуючою котушкою збудження. Для реєстрації сигналу відклику чутливого елемента на дію магнітного поля служить вимірювальна котушка, яка своїми витками охоплює чутливий елемент, який у цьому разі служить її осердям. Завдяки явищу електромагнітної індукції у вимірювальній котушці виникає електрорушійна сила (е.р.с), яка пропорційна до похідної індукції внутрішнього магнітного поля осердя ферозонда по часу. Для виділення сигналу, що є пропорційним повільно змінному слабкому магнітному полю, здійснюється додаткова обробка сигналу е.р.с. вимірювальної котушки, яка може включати виділення вищих гармонік від частоти збудження, фазове детектування, вимірювання часових інтервалів між імпульсами або будь-який інший спосіб вилучення інформації про зміну індуктивності вимірювальної котушки, викликаної полем збудження та вимірюваним полем. Для покращення стабільності пристрою і для розширення динамічного діапазону вимірюваного поля може використовуватись метод нуль-індикатора, в якому виділений сигнал, пропорційний вимірюваному полю, через коло зворотного зв'язку керує магнітним полем додаткової котушки, яка компенсує вимірювальне поле. У результаті ферозондовий магнітометр може вимірювати магнітне поле, що є набагато меншим від амплітуди поля збудження і у порівнянні з ним змінюється повільно або є постійним. Найпростіші ферозонди з однією намагнічуючою котушкою та однією вимірювальною котушкою дозволяють, як правило, вимірювати лише одну компоненту магнітного поля. Для вимірювання інших компонент магнітного поля необхідно здійснювати механічний поворот осі чутливості такого пристрою, що створює додаткові похибки вимірювання. Для вимірювання двох ортогональних компонент магнітного поля використовують ферозонди з спеціальною формою осердя у вигляді кільця [Primdahl F., The Fluxgate Magnetometer // J. Phys. E: Sci Instrum. - 1979. - Vol.12. - P.241-253]. У такому ферозонді окремі компоненти магнітного поля вимірюються за допомогою окремих плоских вимірювальних котушок, кожна з яких намотана так, щоб вісь котушки співпадала з площиною кільця і напрямком чутливості та охоплювала своїми витками усе кільце вздовж його діаметру. Для вимі 92384 4 рювання третьої компоненти поля в кільцевому осерді розміщують однокомпонентний ферозонд так, щоб його вісь чутливості була перпендикулярна до площини кільцевого осердя [Афанасьев Ю.В. Феррозондовые приборы. - Л.: Энергоатомиздат, 1986. - 188с.]. У згаданих магнітометрах для вимірювання кількох компонент магнітного поля необхідним є використання різних вимірювальних котушок і кількох осердь. При необхідності вимірювання трьох компонент магнітного поля для зменшення рівня власного шуму та підвищення чутливості ферозонда на практиці у багатьох випадках використовують три однокомпонентних магнітометри з взаємно ортогональними осями чутливості, що очевидно приводить до зростання масогабаритних характеристик, підвищення енергоспоживання, росту складності та вартості вимірювальної системи, зниженню її надійності та довгострокової стабільності характеристик. Основний фактор, що обумовлює власний шум осердя ферозонда та обмежує зниження порогу чутливості ферозондів і точність вимірювання магнітного поля є т.з. шум Баркгаузена в активному середовищі, що виникає через стрибкоподібному руху стінок магнітних доменів внаслідок їх взаємодії з локальними неоднорідностями магнітного матеріалу, а також через зародження і зникнення самих магнітних доменів. Відомі магнітометри які використовують поворот або обертання вектора намагніченості активного середовища. їх принциповою перевагою є відсутність шуму Баркгаузена, оскільки чутливий елемент не містить стінок магнітних доменів будучи увесь час у монодоменному стані. Чутливий елемент у магнітометрі, описаному в патенті US 3621382, виготовляється з тонкої плівки магнітного металу, а її збудження здійснюється періодичним полем, напрямленим вздовж осі легкого намагнічування (ОЛН) чутливого елемента у його площині. Для забезпечення перемагнічування шляхом оборотного повороту вектора намагніченості плівки у перпендикулярному напрямку у площині плівки прикладають магнітне поле зміщення (поляризуюче поле), яке утримує чутливий елемент у монодоменному стані. Форма тонкої плівки сприяє тому, що напрямок її намагніченості лежить у площині плівки і, таким чином, дозволяє знизити як величину поля зміщення, так і амплітуду поля збудження. Окрім того, використання осердя у формі тонкої плівки з металічних сплавів дозволяє, як правило, уникати виникнення вихрових струмів, що є додатковим джерелом шуму осердя, та неповного перемагнічування осердя внаслідок скін-ефекту. Додатково це дозволяє знизити масу та габарити магнітометра, а також застосувати добре розроблені технології мікроелектроніки, в тому числі для формування керованої магнітної анізотропії чутливого елемента, тобто відповідно орієнтованих ОЛН. Однак, цей магнітометр не дозволяє вимірювати більше ніж одну компоненту магнітного поля вздовж напрямку ОЛН. Крім того, його чутливість зазнає змін при наявності поперечної компоненти магнітного поля. Ще одним недоліком цього при 5 ладу є неможливість усунути вплив нестабільності постійного поля зміщення чи його напрямку на результати вимірювання магнітного поля вздовж ОЛН. Магнітне діелектричне середовище, а саме монокристалічна плівка ферогранату, вирощена методом рідинно-фазної епітаксії на немагнітну підкладку, була використана у магнітометрі, описаному в GB 2271644A, як монодоменний плівковий чутливий елемент. Вона має форму диску, розміщеного у двох плоских котушках з ортогональними осями, паралельними площині плівки. За допомогою синусоїдального струму у котушках з відносним фазовим зсувом /2 створюється магнітне поле збудження, що обертається у площині плівки зі сталою амплітудою. При цьому амплітуда поля є достатня для підтримання плівки чутливого елемента у монодоменному стані. Такий пристрій дозволяє вимірювати дві ортогональні компоненти магнітного поля у площині чутливого елемента. Аналогічний пристрій пропонувався також у [Garcia A., Moron С. Biaxial Magnetometer Sensor // IEEE Trans. Magn. - 2002. - Vol.38. - P.3312-3314]. Однак, у магнітометрі за GB 2271644 A та за US 3621382 є те, що парні гармоніки сигналу е.р.с. вимірювальної котушки, які несуть інформацію про вимірюване поле, у значній мірі маскуються непарними гармоніками, зокрема інтенсивною першою, що створюється безпосередньо періодичним полем збудження, амплітуда якої може бути на кілька порядків більшою від амплітуди вимірюваних гармонік. Найближчим до пропонованого є магнітометричний зонд, описаний в патенті RU 2100819. Він складається з першого чутливого елементу у вигляді тонкої плівки магнітом'якого матеріалу, розміщеного у парі намагнічуючих котушок з ортогональними осями х та у для створення магнітного поля, що обертається у площині ху, та у вимірювальній котушці для вимірювання індукованої електрорушійної сили з віссю, орієнтованою в напрямку х або у, а також з другого чутливого елемента, ідентичного першому, розміщеного в ідентичній парі намагнічуючих котушок та вимірювальній котушці, ідентичній до вимірювальної котушки першого чутливого елемента, і усі котушки другого чутливого елемента орієнтовані своїми осями ідентично до відповідних котушок першого чутливого елемента. У цьому магнітометрі функції вимірювальних котушок виконують намагнічуючі котушки з ортогональними осями. Їх осі паралельні площинам плівок чутливих елементів. Чутливі елементи у формі диску розміщені співвісно, а котушки обох чутливих елементів під'єднані зустрічно. При цьому поле збудження в намагнічуючих котушках у другому елементі обертається у протилежну сторону від обертання магнітного поля збудження у першому з нульовим зсувом фази між ними так, що непарні гармоніки сигналу індукованої е.р.с. у компенсують одна одну, а парні гармоніки подвоюються. Котушки з осями, паралельними до площини чутливого елемента, служать одночасно в якості компенсуючих відповідних компонент поля. Додаткова котушка з віссю перпендикулярною до площин чутливих 92384 6 елементів служить для компенсації перпендикулярної до площини чутливих елементів компоненти магнітного поля через коло зворотного зв'язку. Можливість вимірювання трьох ортогональних компонент магнітного поля за допомогою цього магнітометра декларується на основі того, що сигнал е.р.с. в кожній котушці з віссю, паралельною плівці, містить інформацію про усі три ортогональні компоненти магнітного поля, однак необхідні умови для такої можливості не вказуються, як і спосіб виділення окремих компонент поля з сигналу е.р.с. для організації зворотного зв'язку і реалізації нуль-методу вимірювання усіх трьох компонент магнітного поля. Попри це, слід зауважити, що без спеціальної обробки складного сигналу е.р.с. і розділення складових сигналу, що відповідають різним компонентам магнітного поля, вимірювання кожної складової таким пристроєм будуть чутливими до поперечних компонент магнітного поля. Слід також додати, що розділення компонент складного сигналу е.р.с. при використанні цього пристрою необхідне навіть тоді, коли на практиці потрібно вимірювати лише одну або лише дві ортогональні компоненти магнітного поля. Таким чином, цей магнітометр не дозволяє вимірювати одну чи дві компоненти магнітного поля без впливу інших. Окрім того, цей пристрій не дозволяє вимірювати компоненти просторового градієнту магнітного поля без механічного переміщення магнітометра у просторі. В основу винаходу поставлене завдання створити магніточутливий зонд, в якому наявність додаткових комутуючих пристроїв, нове виконання під'єднання котушок збудження та вимірювальних котушок дозволило забезпечити можливість вимірювання як компонент магнітного поля, так і компонент його просторового градієнта без механічного переміщення магніточутливого зонда в просторі, а також вимірювання окремих однієї, двох або трьох ортогональних компонент магнітного поля або його просторового градієнта відповідно до практичних потреб без впливу поперечних компонент і, таким чином, розширити його функційні можливості. Поставлене завдання вирішується тим, що магніточутливий зонд, який складається з першого чутливого елементу у вигляді тонкої плівки магнітом'якого матеріалу, розміщеного у парі намагнічуючих котушок з ортогональними осями х та у з можливістю створення магнітного поля, що обертається у площині ху, та у вимірювальній котушці індукованої електрорушійної сили з віссю, орієнтованою в напрямку х або у, а також з другого чутливого елемента, ідентичного першому, розміщеного в ідентичній парі намагнічуючих котушок та вимірювальній котушці, ідентичній до вимірювальної котушки першого чутливого елемента, і усі котушки другого чутливого елемента орієнтовані своїми осями ідентично до відповідних котушок першого чутливого елемента, згідно з винаходом вимірювальна котушка другого чутливого елемента з'єднана з вимірювальною котушкою першого чутливого елемента через пристрій комутації вимірювальних котушок із забезпеченням можливості зміни напрямку під'єднання другої вимірюва 7 льної котушки до першої, кожна з намагнічуючих котушок другого чутливого елемента під'єднана до джерела змінного струму через окремий пристрій комутації котушок намагнічування із забезпеченням можливості зміни напрямку струму в кожній намагнічуючій котушці другого чутливого елемента на протилежний по відношенню до напрямку струму в ідентично орієнтованій намагнічуючій котушці першого чутливого елемента, другий чутливий елемент зонду розміщений на відстані вздовж кожної з осей х, у та z і обидва чутливі елементи орієнтовані відносно котушок збудження та між собою відповідно до магнітної анізотропії матеріалу чутливих елементів. Уведення до складу магнітометричного зонда комутуючих пристроїв котушок намагнічування другого чутливого елемента забезпечують можливість змінювати напрямок обертання магнітного поля збудження в одному чутливому елементі по відношенню до іншого, а також змінити відносний фазовий зсув між полями збудження двох чутливих елементів на . Це, в свою чергу, забезпечує такі режими збудження чутливих елементів зонда, які внаслідок відповідного під'єднання вимірювальних котушок через пристрій комутації вимірювальних котушок, а саме послідовного чи зустрічного, а також взаємного розміщення чутливих елементів на відстані по трьох ортогональних осях, забезпечують можливість виділення складових сигналу вимірювання однієї, двох або трьох ортогональних компонент магнітного поля або його просторового градієнту, тобто забезпечують багатофункційність магнітометричного зонда. Орієнтація чутливих елементів відносно котушок збудження та між собою забезпечує необхідну для роботи магніточутливого зонда ферозондового типу модуляцію вздовж трьох ортогональних осей чутливості. Винахід пояснюється фігурами, на яких: на Фіг.1 схематично показане взаємне розміщення чутливих елементів магніточутливого зонда, намагнічуючих котушок, вимірювальних котушок та під'єднання комутуючих пристроїв намагнічуючих котушок та вимірювальних котушок, на Фіг.2 показані можливі альтернативні орієнтації вимірювальних котушок чутливого елемента магніточутливого зонда, на Фіг.3 показана електрична схема можливої реалізації комутуючого пристрою однієї з намагнічуючих котушок другого чутливого елемента, на Фіг.4 показана електрична схема можливої реалізації комутуючого пристрою вимірювальних котушок, на Фіг.5 схематично подано орієнтацію проекцій осей легкого намагнічування (ОЛН) з монокристалічної плівки кубічного кристалу з кристалографічною орієнтацією (111) на цю площину, які нахилені до площини плівки і не мають дзеркально симетричних відносно площини плівки ОЛН, на Фіг.6 схематично подано можливі взаємні орієнтації плівок чутливих елементів, якщо в якості чутливого елемента використовується плівка, що володіє хоча б однією віссю легкого намагнічування, нахиленою до площини плівки і не має інших 92384 8 дзеркально симетричних відносно площини плівки ОЛН, на Фіг.7 показане миттєве положення вектора магнітного поля збудження першого чутливого елемента, на Фіг.8 наведено зображення траєкторії, яку описує кінець вектора намагніченості монокристалічної плівки кристалографічної орієнтації (111) магнетика з кубічною кристалічною структурою, для якого осями легкого намагнічування є осі або , при перемагнічуванні в магнітному полі, що обертається у площині плівки, разом з проекціями осей легкого намагнічування на площину плівки (стрілки), де 1 та 2 - перший та другий чутливі елементи магнітометричного зонда; 3 і 4 - намагнічуючі котушки першого та другого чутливих елементів, орієнтовані своїми осями вздовж х і у відповідно; 5 - вимірювальні котушки першого та другого чутливих елементів, орієнтовані вздовж осі х; 6 - вимірювальна котушка чутливого елемента в альтернативній орієнтації вздовж осі у; 7 - комутуючі пристрої намагнічуючих котушок другого чутливого елемента, 8 - комутуючий пристрій вимірювальних котушок; 9 і 10 - контакти для під'єднання схеми оброблення індукованого сигналу; 11 і 12 - контакти для під'єднання змінного струму намагнічуючих котушок 3, орієнтованих вздовж осі х; 13 і 14 - контакти для під'єднання змінного струму намагнічуючих котушок 4, орієнтованих вздовж осі у; 15 і 16 перемикачі комутуючих пристроїв намагнічуючих котушок та вимірювальних котушок відповідно; 17 осі легкого намагнічування (ОЛН), що не мають дзеркально симетричних відносно площини плівки ОЛН; U x та U y - індуковані електрорушійні сили на виводах вимірювальних котушок 5 та 6 відповідно; H0 - вектор напруженості намагнічуючого поля збудження чутливого елемента; t - фаза поля, що повертається у площині ху. Магніточутливий зонд складається (Фіг.1) з першого чутливого елемента 1 у вигляді диска з тонкої плівки магнітом'якого матеріалу, розміщеного у парі намагнічуючих котушок 3 і 4 з ортогональними осями х та у відповідно для створення магнітного поля, що обертається у площині ху, та у вимірювальній котушці 5 з віссю, орієнтованою в напрямку х, для вимірювання індукованої електрорушійної сили, а також з другого чутливого елемента 2, ідентичного першому 1, розміщеного в ідентичній парі намагнічуючих котушок 3 та 4 та вимірювальній котушці 5, ідентичній до вимірювальної котушки першого чутливого елемента, а усі котушки другого чутливого елемента орієнтовані своїми осями ідентично до відповідних котушок першого чутливого елемента 1. Другий чутливий елемент 2 зміщений від першого чутливого елемента 1 на деяку відстань вздовж усіх трьох осей х, у та z. Намагнічуючі котушки 3 і 4 другого чутливого елемента 2 під'єднані до джерела змінного струму (контакти 11 і 12 та 13 і 14 відповідно) через окремі комутуючі пристрої намагнічуючих котушок 7, що забезпечують можливість зміни напрямку струму в них. Вимірювальна котушка 5 другого чутливого елемента 2 під'єднана до вимі 9 92384 рювальної котушки 5 першого чутливого елемента 1 через комутуючий пристрій вимірювальних котушок 8, який забезпечує можливість зміни напрямку під'єднання вимірювальних котушок з послідовного на зустрічне. Комутуючі пристрої 7 намагнічуючих котушок 3 і 4 другого чутливого елемента 2 забезпечують можливість зміни напрямку струму в них за допомогою перемикачів 15 (Фіг.3). Це дозволяє змінити напрямок обертання магнітного поля збудження, в якому знаходиться другий чутливий елемент 2, по відношенню до напрямку обертання поля збудження першого чутливого елемента 1, а також забезпечити зміну зсуву фаз між полями збудження в першому 1 та другому 2 чутливих елементах з нуля на . Комутуючий пристрій 8 вимірювальних котушок (Фіг.4) забезпечує можливість зміни способу під'єднання вимірювальних котушок першого 1 та другого 2 чутливих елементів з послідовного (верхнє положення перемикача 16 на Фіг.4) на зустрічне (нижнє положення перемикача 16 на Фіг.4). Чутливий елемент може бути виготовлений з магнітом'якого матеріалу з різними властивостями магнітної анізотропії. Матеріалом чутливих елемента може бути, наприклад, епітаксійна плівка ферогранату з кристалографічною орієнтацією поверхні (111), вирощена методом рідинно-фазної епітаксії на підкладку немагнітного гранату тієї ж кристалографічної орієнтації, яка має помірну додатну або від'ємну одновісну магнітну анізотропію (див. напр. [Syvorotka І.М., Ubizskii S.B., Kucera M., Kuhn M., Vertesy Z. Growth and characterization of Bi, Pr- and Bi, Sc-substituted lutetium iron garnet films with planar magnetization for magneto-optic visualization // Journal of Physics D: Applied Physics 2001. - V.34. - P.1178-1187]). У цьому разі напрямки ОЛН плівки відповідають Фіг. 5 [Ubizskii S. B. Orientational states of magnetization in (111)-oriented iron garnet films // J. Magn. & Magn. Mat. - 1999. V.195. - P.575-582]. sin t Ux 0 wMs V 0 wMs V 2 5 2 Взаємна орієнтація чутливих елементів 1 і 2 у просторі може бути паралельною (Фіг.6а) або антипаралельною (Фіг.6б), тобто дзеркальною відносно площини ху так, щоб хоча б одна вісь легкого намагнічування 17 (Фіг.6б) відхилялася від площини ху у площині yz у протилежні боки на однаковий кут. Кожна пара намагнічуючих котушок 3 і 4 першого та другого чутливих елементів призначена для створення магнітного поля збудження з амплітудою H0 , яке обертається у площині ху з круговою частотою (Фіг.7). Для забезпечення такої можливості намагнічуючі котушки 3, орієнтовані вздовж осі х, під'єднані через контакти 11 та 12, а котушки 4, орієнтовані вздовж осі у, - через контакти 13 і 14 відповідно, до джерел змінного струму з круговою частотою так, щоб зсув фази між струмами в ортогональних котушках складав /2. Наприклад, якщо збудження чутливих елементів 1 і 2 забезпечується гармонічним струмом, то при пропорційності струму в намагнічуючій котушці 3 до cos t , значення струму в намагнічуючій котушці 4 є пропорційним до sin t , що відповідає в момент часу t азимуту вектора магнітного поля збудження у площині ху або його фазі t (Фіг.7). Магніточутливий зонд може працювати при використанні пари вимірювальних котушок 5, орієнтованих вздовж осі х, або пари вимірювальних котушок 6 (Фіг.2), орієнтованих вздовж осі у. Обертання вектора магнітного поля збудження, створеного намагнічуючими котушками 3 і 4, а також наявність малого і повільно змінного у порівнянні з полем збудження вимірюваного поля h hx , hy , hz дозволяє реєструвати у вимірювальних котушках 5 або 6 (Фіг.2) відповідні сигнали електрорушійної сили: sin 5 t hy hx sin 2 t H0 cos t Uy 5 2 hx cos 2 t H0 hy H0 де 0 4 10 7 Гн/м - магнітна стала (магнітна проникність вакууму), w - щільність витків вимірювальної котушки, що повністю закриває чутливий елемент, Ms - намагніченість насичення матеріалу плівки чутливого елемента, V - об'єм плівки чутливого елемента, 1 і 2 - параметри, що залежать від магнітних характеристик матеріалу чутливого елемента, а саме для (111) орієнтованої монокристалічної плівки кубічного магнетика: 7 2 2 sin 7 t hz cos 2 t 2 1 H0 H0 2 cos 5 10 t 7 2 2 cos 7 2 , (1a) t hz sin 2 t 2 1 H0 1 hz cos 4 t 1 H0 hz sin 4 t 1 H0 , (1b) 2 6H1 H2 , 6 HS 1 1 H2 18 H0 6H1 H2 6HS 2 , де HS Ms 2HU H1 H2 / 9 є напруженість магнітного поля, в якому відбувається насичення намагнічування плівки в перпендикулярному до неї напрямку, HU KU / Ms , H1 K1 / Ms , H2 K 2 / Ms , а 11 K1 і K 2 є першою та другою константами кубічної магнітної (магнітокристалічної) анізотропії. У наведених виразах передбачається, що вимірювальні котушки повністю охоплюють своїми витками увесь об'єм плівки чутливого елемента. Вирази (1) отримані на основі моделі [Ubizskii S.B. Magnetization reversal modeling for (111)-oriented epitaxial films of iron garnets with mixed anisotropy // J. Magn. & Magn. Mat. - 2000. - V.219, No.1. - P.127141], яка описує перемагнічування епітаксійної плівки ферогранату в магнітному полі, що обертається у площині плівки. Аналогічні вирази на основі підходу [Ubizskii S. B. Magnetization reversal modeling for (111)-oriented epitaxial films of iron garnets with mixed anisotropy // J. Magn. & Magn. Mat. - 2000. - V.219, No.1. - P.127-141] та [Убізський С. Б. Феромодуляційний перетворювач магнітного поля на основі епітаксійної плівки ферогранату // Вісник Національного університету "Львівська політехніка", Сер. Електроніка. - 2001, №423. - С.5965] можуть бути отримані і для інших типів магнітної анізотропії плівки чутливого елемента. Зокрема, для випадку одновісної анізотропії з ОЛН, нахиленою до площини плівки вони отримані в [Павлик Л.П., Убізський С.Б. Вплив симетрії магнітної анізотропії активного середовища на можливість векторного вимірювання магнітного поля феромодуляційним перетворювачем // Вісник Національного університету "Львівська політехніка", Серія Електроніка - 2007, №592. - С.173-181]. Як видно з виразів (1) саме парні гармоніки індукованого сигналу є пропорційними до компонент вимірюваного зовнішнього поля h hx , hy , hz . У просторово неоднорідному магнітному полі на відстані, на яку віддалений другий чутливий елемент відносно першого x, y, z , виникає зміна магнітного поля hx , hy , hz , викликана наявністю його просторового градієнта, який через вимірювання може бути визначений: h x , h y , hz h hx , hy , hz hx / x, hy / y, hz / z . Можливість зміни напрямку обертання магнітного поля збудження другого чутливого елемента 2 по відношенню до напрямку обертання поля збудження першого чутливого елемента 1, а також зміни відносного зсуву фаз між полями збудження в першому 1 та другому 2 чутливому елементі, що забезпечується комутуючими пристроями 7 намагнічуючих котушок другого чутливого елемента 2, приводить до того, що у вимірювальних котушках другого чутливого елемента 2 індукуються сигнали електрорушійної сили, що відрізняються від сигналів, поданих виразами (1), заміною t на - t у першому випадку та додаванням зсуву фаз до t у другому випадку. Наявність у складі пристрою другого чутливого елемента 2 з вимірювальною котушкою, під'єднаною до вимірювальної котушки першого чутливого елемента через комутуючий пристрій 8, забезпечує утворення сигналу, що рівний у залежності від положення перемикача 16 сумі або різниці сигналів електрорушійних сил у вимірювальних котушках 5 (або 6) першого 1 та другого 2 чутливих еле 92384 12 ментів. У результаті в залежності від положення перемикачів 16 у двох комутуючих пристроях 7 намагнічуючих котушок 3 і 4 другого чутливого елемента 2 та положення перемикача 16 в комутуючому пристрої 8 вимірювальних котушок реалізуються різні можливі конфігурації магніточутливого зонда і, відповідні індуковані сигнали, які реєструються на контактах 9 і 10. Частина з цих конфігурацій, яка дозволяє скомпенсувати непарні гармоніки у сигналі, що формується на контактах 9 та 10, показана у Табл. 1, в якій подані взаємна орієнтація чутливих елементів магніточутливого зонду, напрямки обертання намагнічуючого поля у чутливих елементах 1 і 2 на прикладі гармонічного струму при відповідному під'єднанні намагнічуючих котушок через комутуючий пристрій 7, початкові зсуви фаз між полями збудження, під'єднання вимірювальних котушок відповідної орієнтації через пристрій комутації 8 та компоненти магнітного поля або його просторової зміни, які можуть бути виміряні у відповідних конфігураціях. Усі інші можливі конфігурації не приводять до взаємної компенсації непарних гармонік і, оскільки їх амплітуда набагато перевищує амплітуду парних гармонік, в яких міститься інформація про компоненти вимірюваного поля, то вони є непридатними для вимірювання магнітного поля з високою точністю. Парні гармоніки сигналу електрорушійної сили, які залежать від компонент зовнішнього магнітного поля h hx , hy , hz , у конфігураціях, поданих в Табл.1, подвоюються або взаємно компенсуються. При цьому можлива часткова компенсація так, що виключається залежність від однієї чи двох компонент вимірюваного магнітного поля. Наприклад, у конфігурації 1 за Табл.1, усі парні гармоніки сигналів електрорушійної сили двох вимірювальних котушок взаємно компенсуються у тому разі, коли обидва чутливих елементи знаходяться в однако вому магнітному полі h hx , hy , hz . Однак, якщо завдяки розміщенню другого чутливого елемента 2 на деякій відстані від першого чутливого елемента 1 по осях х, у та z (див. Фіг.1) парні гармоніки результуючого сигналу електрорушійної сили міститимуть інформацію про різницю компонент напруженості просторово неоднорідності магнітного поля hx , hy , hz , що дозволяє визначити ком поненти його просторового градієнту h . У конфігурації 4 за Табл.1 - навпаки, усі парні гармоніки сигналів електрорушійної сили від двох вимірювальних котушок сумуються, що дозволяє визначити усі три компоненти середньої напруженості магнітного поля в області розміщення магніточутливого зонду. Інші конфігурації першої групи у Табл.1 (конфігурації 2 і 3) дозволяють у залежності від положення перемикача 16 комутуючого пристрою вимірювальних котушок та перемикачів 15 комутуючих пристроїв 7 намагнічуючих котушок 3 і 4 другого чутливого елемента 2 здійснити вимірювання окремо однієї або двох ортогональних компонент магнітного поля або відповідно двох або однієї компоненти просторового градієнту магнітного поля. 13 92384 14 Таким чином, взаємне розміщення чутливих елементів 1 і 2 у просторі, їх взаємна орієнтація, наявність у складі пристрою комутуючого пристрою 8 вимірювальних котушок та комутуючих пристроїв 7 намагнічуючих котушок 3 і 4 другого чутливого елемента 2 дозволяє забезпечити багатофункційність магніточутливого зонду, а саме можливість вимірювання однієї, двох або трьох ортогональних компонент магнітного поля або його просторового градієнту. Чутливість магніточутливого зонду до zкомпоненти магнітного поля у щойно розглянутому прикладі реалізації пристрою за винаходом забезпечується властивостями магнітної анізотропії, а саме зміною напрямку вектора намагніченості чутливого елемента при обертальному перемагнічуванні у такий спосіб, що вектор намагніченості відхиляється почергово вгору або вниз від площини плівки, намагаючись наблизитися до відповідно орієнтованих у просторі осей легкого намагнічування (ОЛН). Просторова орієнтація ОЛН епітаксійної плівки ферогранату орієнтації (111) показана на Фіг.5 у вигляді кристалографічних позначень напрямків проекцій ОЛН на кристалографічну площину (111), яка в розглянутому прикладі співпадає з площиною ху, де суцільними стрілками показані осі ОЛН, які відхиляються від площини плівки в один бік від площини плівки ("вверх"), а штрихованими стрілками - ті ОЛН, які відхиляються від площини плівки в протилежний бік ("вниз"). Орієнтація ОЛН, показана на Фіг.5, реалізується для матеріалу, який має ОЛН об'ємного кристалу, напрямлені вздовж сімейства кристалографічних напрямків при додатних значеннях першої константи кубічної анізотропії (наприклад для монокристала заліза) або сімейства напрямків при від'ємних значеннях першої константи кубічної анізотропії (наприклад для монокристала нікелю або епітаксійних плівок сімейства ферогранатів). Траєкторію руху кінця вектора намагніченості при обертальному намагнічуванні у площині плівки ферогранату з кристалографічною орієнтацією (111) показано на Фіг.8 [Ubizskii S.B. Magnetization reversal modeling for (111)-oriented epitaxial films of iron garnets with mixed anisotropy // J. Magn. & Magn. Mat. - 2000. - V.219, No.1. - P.127-141]. Точки на траєкторії відповідають максимальному відхиленню вектора намагніченості від площини плівки і максимальному наближенню до ОЛН, проекції яких на площину плівки позначені стрілками. Отже, Фіг. 8 показує, яким чином здійснюється модуляція руху вектора намагніченості чутливого елемента при його перемагнічуванні магнітним полем, що обертається у площині плівки, і забезпечується чутливість зонда до z-компоненти магнітного поля або його просторового градієнта. Таким, чином нове виконання магніточутливого зонду, що додатково включає комутуючі пристрої 7 та 6, а також розміщення чутливих елементів на відстані вздовж осей x, у та z і їх орієнтація відносно котушок та відносно один одного відповідно до магнітної анізотропії матеріалу чутливих елементів, дозволило забезпечити можливість вимірювання як компонент магнітного поля, так і компонент його просторового градієнта без механічного переміщення зонда в просторі, а також вимірювання окремих однієї, двох або трьох ортогональних компонент магнітного поля або його просторового градієнта без впливу поперечних компонент і, таким чином, розширити його функційні можливості. 15 92384 16 17 Комп’ютерна верстка А. Рябко 92384 Підписне 18 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMagnetic-sensitive probe
Автори англійськоюUbizskyi Serhii Borysovych, Khristophorou Evangelos, Pavlik Liubomyr Pylypovych
Назва патенту російськоюМагниточувствительный зонд
Автори російськоюУбизский Сергей Борисович, Христофору Эвангелос, Павлик Любомир Филиппович
МПК / Мітки
МПК: G01R 33/00
Мітки: магніточутливий, зонд
Код посилання
<a href="https://ua.patents.su/9-92384-magnitochutlivijj-zond.html" target="_blank" rel="follow" title="База патентів України">Магніточутливий зонд</a>
Магніточутливий сенсор
Номер патенту: 49256
Опубліковано: 26.04.2010
Автори: Вікулін Іван Михайлович, Курмашев Шаміль Джамашевич, Вікуліна Лідія Федорівна
МПК: H01L 29/82
Мітки: магніточутливий, сенсор
Формула / Реферат:
Магніточутливий сенсор, що містить генератор релаксаційних коливань на базі одноперехідного транзистора, який доповнено конденсатором С, який відрізняється тим, що до схеми генератора включений біполярний магнітотранзистор в двополюсному включенні (тобто з відключеною базою).
Дуоденальний зонд

Номер патенту: 37942
Опубліковано: 15.05.2001
Автор: Іващук Олександр Іванович
МПК: A61M 25/00
Мітки: зонд, дуоденальній
Текст:
...Ушивали лапаратомічну рану. До правого підребер'я підводили постійний магніт, який фіксували металевою сіткою з метою попередження вигризання твариною. Собаки перебували на воді та рідких кашах на протязі всього терміну спостереження. Визначили, чи не відбувається процес утворення пролежнів на протязі 4 діб. На 4 добу виконували повторну операцію і видаляли зонд. Макроскопічно - змін зі сторони передньої стінки дванадцятипалої кишки...
Занурюваний вимірювальний зонд, зокрема вкидуваний вимірювальний зонд
Номер патенту: 92312
Опубліковано: 25.10.2010
Автор: Герітс Ерік
МПК: G01N 27/406, G01K 17/00
Мітки: вимірювальний, зонд, зокрема, вкидуваний, занурюваний
Формула / Реферат:
1. Занурюваний вимірювальний зонд, зокрема, вимірювальний зонд, вкидуваний у розплави металів, що має вимірювальну головку, на якій розміщено принаймні один тримач датчика з принаймні одним датчиком, причому тримач датчика встановлено на отворі у головці вимірювання або в ній, причому принаймні одна частина вимірювальної головки має контакт з протилежним електродом розміщеного на вимірювальній головці електрохімічного датчика і утворює...
Резонаторний зонд для контролю комплексної діелектричної проникності матеріалів
Номер патенту: 34636
Опубліковано: 15.03.2001
Автори: Русаков Олег Геннадійович, Мойсеєв Володимир Констянтинович, Васьков Сергій Михайлович
МПК: G01R 27/26
Мітки: резонаторний, контролю, зонд, діелектричної, матеріалів, проникності, комплексної
Формула / Реферат:
1. Резонаторний зонд для контролю комплексної діелектричної проникності матеріалів, який містить резонатор у вигляді відрізка коаксіальної пінії передачі резонансної довжини, розімкнутої на кінці, зверненому до матеріалу, пристроїв, електромагнітного зв'язку його зі схемою виміру і плоский фланець, який відрізняється тим, що фланець виконано у вигляді діелектричної плоскої круглої пластини, встановленої на відкритому торці резонатора на одній...
Заглибний вимірювальний зонд для вимірювання у рідинах
Номер патенту: 56227
Опубліковано: 15.05.2003
Автор: Тьовіс Альфонс
МПК: G01N 33/20, G01K 7/02, G01N 1/10
Мітки: заглибний, зонд, вимірювання, вимірювальний, рідинах
Формула / Реферат:
1. Заглибний вимірювальний зонд для вимірювання у рідинах, зокрема у розплавах металів, який містить трубчастий корпус, встановлену на кінці трубчастого корпусу вимірювальну головку, причому у вимірювальній головці розміщені вимірювальні елементи, а також сигнальні провідники для передачі вироблених вимірювальними елементами сигналів, причому сигнальні провідники мають довжину більшу, ніж довжина трубчастого корпусу, і прокладені від кінця...
Попередній патент: Речовина, яка має нейромодуляторну активність
Наступний патент: Спосіб визначення власного коефіцієнта підсилення операційного підсилювача (варіанти)
Випадковий патент: Ланцюговий конвеєр