Спосіб контролю виконання завдань рухливими транспортними засобами
Номер патенту: 96029
Опубліковано: 12.01.2015
Автори: Сипко Андрій Сергійович, Сипко Сергій Олександрович, Сипко Олексій Сергійович, Сипко Олена Михайлівна
Формула / Реферат
1. Спосіб контролю виконання завдань рухливими транспортними засобами, що включає періодичне визначення за допомогою супутникової глобальної системи позиціонування координат знаходження й часу транспортного засобу, передачу цих даних з розташованого на транспортному засобі мобільного термінального пристрою із приймачем супутникової глобальної системи позиціонування на центральний диспетчерський пункт через систему мобільного зв'язку, обробку, зберігання й відображення інформації на центральному диспетчерському пункті, який відрізняється тим, що функції центрального диспетчерського пункту здійснюють за допомогою розташовуваної на сервері системи контролю виконання завдань, за допомогою математичного забезпечення системи планування на основі базового плану формують завдання для транспортного засобу, що містить маршрут руху у вигляді набору геозон і часу, коли транспортний засіб має перебувати в них, і по лінії зв'язку інформацію про завдання для транспортного засобу завантажують у систему контролю виконання завдань, з розташованого на транспортному засобі мобільного термінального пристрою із приймачем супутникової глобальної системи позиціонування координати транспортного засобу й час періодично передають у систему контролю виконання завдань за допомогою лінії мобільного зв'язку, після одержання чергових координат з розташованого на транспортному засобі мобільного термінального пристрою із приймачем супутникової глобальної системи позиціонування за допомогою математичного забезпечення системи контролю виконання завдань обчислюють приналежність транспортного засобу до геозони в рамках завдання, аналізують попередні стани (статуси) і визначають поточний стан (статус) залежно від попередніх станів (статусів) і геозон, у системі контролю виконання завдань інформацію зберігають, обробляють за допомогою математичного забезпечення й відображають через WEB-Інтерфейс і передають по лінії мобільного зв'язку на розташований на транспортному засобі мобільний термінальний пристрій із приймачем супутникової глобальної системи позиціонування й на мобільні термінальні пристрої спостерігачів для контролю знаходження транспортного засобу в заданий час у заданому стані (статусі).
2. Спосіб за п. 1, який відрізняється тим, що після настання подій у систему контролю виконання завдань передають інформацію про стан (статус) транспортного засобу з мобільних термінальних пристроїв спостерігачів і з інших систем за допомогою ліній мобільного або іншого зв'язку.
3. Спосіб за п. 1 або за п. 2, який відрізняється тим, що інформацію про завдання транспортного засобу по лінії мобільного зв'язку передають із системи контролю виконання завдань на розташований на транспортному засобі мобільний термінальний пристрій із приймачем супутникової глобальної системи позиціонування й на мобільні термінальні пристрої спостерігачів.
4. Спосіб за п. 1, який відрізняється тим, що періодично після одержання системою контролю виконання завдань інформації про хід виконання завдання для транспортного засобу, цю інформацію по лінії зв'язку направляють у систему планування й з урахуванням цієї інформації за допомогою математичного забезпечення системи планування, генерують нове завдання або вносять коректування в існуюче завдання для транспортного засобу й із системи планування по лінії зв'язку завантажують у систему контролю виконання завдань.
5. Спосіб за п. 1, який відрізняється тим, що через WEB-Інтерфейс здійснюють зв'язок із системою контролю виконання завдань і управляють завданнями, додають завдання, видаляють завдання, спостерігають історію виконання завдання на мапі.
6. Спосіб за п. 1, який відрізняється тим, що розташований на транспортному засобі мобільний термінальний пристрій із приймачем супутникової глобальної системи позиціонування й мобільні термінальні пристрої спостерігачів мають екрани.
7. Спосіб за п. 6, який відрізняється тим, що як обладнані екранами мобільні термінальні пристрої застосовують смартфони.
8. Спосіб за п. 6 або за п. 7, який відрізняється тим, що на екранах мобільних термінальних пристроїв відображають поточне розташування транспортного засобу на мапі.
9. Спосіб за п. 1 або за п. 2, або за п. 3, або за п. 4, або за п. 5, або за п. 6, або за п. 7, або за п. 8, який відрізняється тим, що здійснюють контроль виконання завдань сукупністю транспортних засобів.
Текст
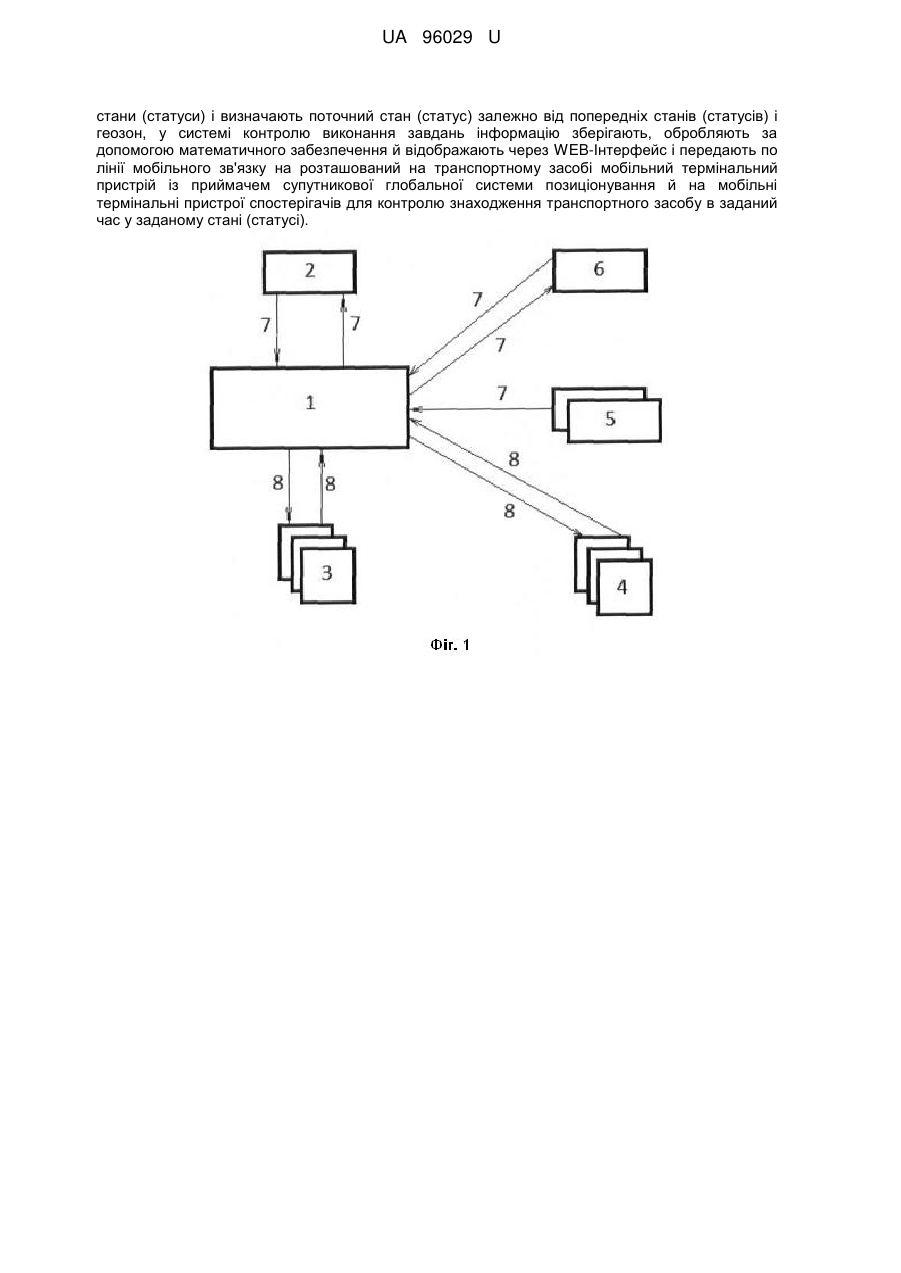
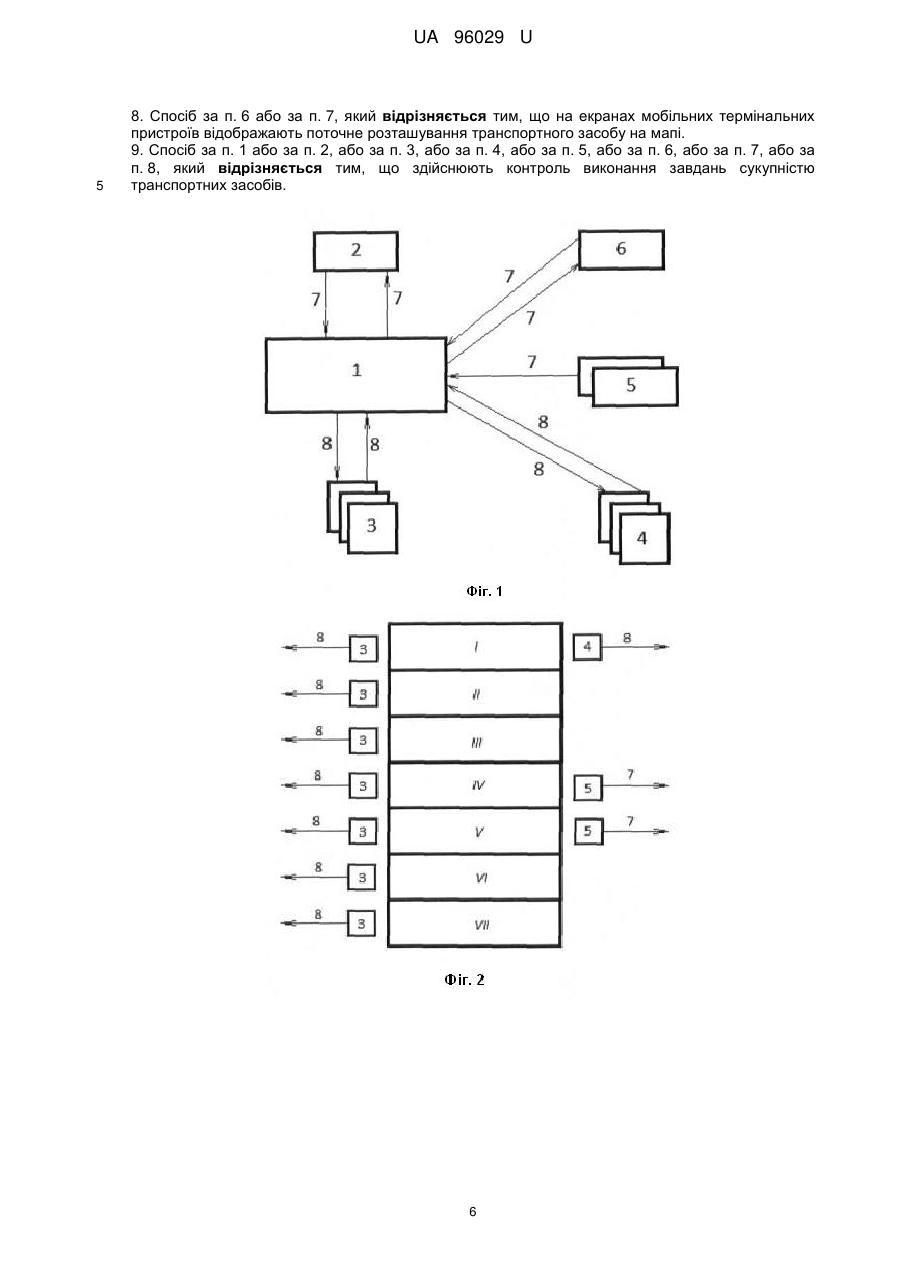
Реферат: Спосіб контролю виконання завдань рухливими транспортними засобами включає періодичне визначення за допомогою супутникової глобальної системи позиціонування координат знаходження й часу транспортного засобу, передачу цих даних з розташованого на транспортному засобі мобільного термінального пристрою із приймачем супутникової глобальної системи позиціонування на центральний диспетчерський пункт через систему мобільного зв'язку, обробку, зберігання й відображення інформації на центральному диспетчерському пункті. Функції центрального диспетчерського пункту здійснюють за допомогою розташовуваної на сервері системи контролю виконання завдань, за допомогою математичного забезпечення системи планування на основі базового плану формують завдання для транспортного засобу і по лінії зв'язку інформацію про завдання для транспортного засобу завантажують у систему контролю виконання завдань. З розташованого на транспортному засобі мобільного термінального пристрою із приймачем супутникової глобальної системи позиціонування координати транспортного засобу й час періодично передають у систему контролю виконання завдань за допомогою лінії мобільного зв'язку, після одержання чергових координат з розташованого на транспортному засобі мобільного термінального пристрою із приймачем супутникової глобальної системи позиціонування, за допомогою математичного забезпечення системи контролю виконання завдань обчислюють приналежність транспортного засобу до геозони в рамках завдання. Аналізують попередні UA 96029 U (12) UA 96029 U стани (статуси) і визначають поточний стан (статус) залежно від попередніх станів (статусів) і геозон, у системі контролю виконання завдань інформацію зберігають, обробляють за допомогою математичного забезпечення й відображають через WEB-Інтерфейс і передають по лінії мобільного зв'язку на розташований на транспортному засобі мобільний термінальний пристрій із приймачем супутникової глобальної системи позиціонування й на мобільні термінальні пристрої спостерігачів для контролю знаходження транспортного засобу в заданий час у заданому стані (статусі). UA 96029 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі контролю й керування рухом різних транспортних засобів, переважно автомобільних, і може бути використаною для централізованого контролю місць знаходження транспортних засобів, фіксування поточних станів транспортного засобу й виконання завдань транспортним засобом, зокрема у процесі збирання, перевезення й переробки овочів, наприклад томатів. Відомий спосіб контролю місця розташування транспортного засобу, що включає періодичне визначення за допомогою супутникової глобальної системи радіонавігації (супутникової глобальної системи позиціонування) координат знаходження й часу транспортного засобу, передачу цих даних на центральний диспетчерський пункт через систему стільникового (мобільного) зв'язку, обробку, зберігання й відображення інформації на центральному диспетчерському пункті (Патент США № 6347281, МПК G01S 19/48, G01S 5/00, G01S 5/14, G01C 21/00, опубл. 12.02.2002). Проте відомий спосіб забезпечує лише надання інформації про місце розташування транспортного засобу й не дає уявлення про те, завантажений він чи ні; крім того, просте відображення транспортних засобів на карті не дає інформації про те, скільки з них їде на поле (порожні), а скільки їде на завод (завантажені). Технічна задача корисної моделі полягає в удосконаленні способу керування й моніторингу рухливого транспортного засобу, що включає періодичне визначення за допомогою супутникової глобальної системи позиціонування координат знаходження й часу транспортного засобу, передачу цих даних з розташованого на транспортному засобі мобільного термінального пристрою із приймачем супутникової глобальної системи позиціонування на центральний диспетчерський пункт через систему мобільного зв'язку, обробку, зберігання й відображення інформації на центральному диспетчерському пункті, шляхом здійснення функцій центрального диспетчерського пункту системою контролю виконання завдань, формування за допомогою математичного забезпечення системи планування на основі базового плану завдання для транспортного засобу, що містить маршрут руху у вигляді набору геозон і часу, коли транспортний засіб має перебувати в них, і завантаження інформації про завдання для транспортного засобу по лінії зв'язку (наприклад комп'ютерного, телефонного або іншого) у систему контролю виконання завдань, шляхом періодичної передачі з розташованого на транспортному засобі мобільного термінального пристрою із приймачем супутникової глобальної системи позиціонування координат транспортного засобу й часу в систему контролю виконання завдань за допомогою лінії мобільного зв'язку, шляхом обчислення за допомогою математичного забезпечення системи контролю виконання завдань приналежності транспортного засобу до геозони в рамках завдання з аналізом попередніх станів (статусів) і визначення поточного стану (статусу) залежно від попередніх станів (статусів) і геозон після одержання чергових координат з розташованого на транспортному засобі мобільного термінального пристрою із приймачем супутникової глобальної системи позиціонування, а також шляхом зберігання й обробки інформації за допомогою математичного забезпечення в системі контролю виконання завдань і відображення через WEB-інтерфейс і передачі по лінії мобільного зв'язку на розташований на транспортному засобі мобільний термінальний пристрій із приймачем супутникової глобальної системи позиціонування й на мобільні термінальні пристрої спостерігачів для контролю знаходження транспортного засобу в заданий час у заданому стані (статусі). Після настання подій у систему контролю виконання завдань можуть передавати інформацію про стан (статуси) транспортного засобу з мобільних термінальних пристроїв спостерігачів і з інших систем за допомогою ліній мобільного зв'язку або через WEBінтрефейс, інформацію про завдання транспортного засобу можуть передавати по лінії мобільного зв'язку із системи контролю виконання завдань на розташований на транспортному засобі мобільний термінальний пристрій із приймачем супутникової глобальної системи позиціонування й на мобільні термінальні пристрої спостерігачів, періодично після одержання системою контролю виконання завдань інформації про хід виконання завдання для транспортного засобу цю інформацію можуть по лінії зв'язку (наприклад комп'ютерного, телефонного або іншого) направляти в систему планування й з урахуванням цієї інформації за допомогою математичного забезпечення системи планування генерувати нове завдання або вносити коректування в існуюче завдання для транспортного засобу й із системи планування по лінії зв'язку (наприклад комп'ютерного, телефонного або іншого) завантажувати в систему контролю виконання завдань, здійснювати зв'язок через WEB-інтерфейс із системою контролю виконання завдань і управляти завданнями, додавати завдання, видаляти завдання, спостерігати історію виконання завдання на мапі. Розташований на транспортному засобі мобільний термінальний пристрій із приймачем супутникової глобальної системи позиціонування й мобільні термінальні пристрої спостерігачів можуть мати екрани як мобільні 1 UA 96029 U 5 10 15 20 25 30 35 40 45 50 55 термінальні пристрої, що мають екрани, можуть бути застосовані смартфони, і на екранах мобільних термінальних пристроїв можуть відображати поточне розташування транспортного засобу на мапі. Аналогічно можуть здійснювати контроль виконання завдань сукупністю транспортних засобів. Пропонований спосіб дозволяє контролювати знаходження транспортного засобу в заданий час у заданому стані (статусі), дає можливість обчислення поточного стану (статусу) транспортного засобу залежно від попередніх станів (статусів) і геозон (місць із певними координатами), забезпечує можливість автоматичного або ручного створення (генерування) завдань, можливість доставки завдань на розташований на транспортному засобі мобільний термінальний пристрій, що відображає завдання водієві, а також дає можливість зміни завдання після його доставки або повторної доставки. Спосіб контролю виконання завдань рухливими транспортними засобами включає формування за допомогою математичного забезпечення системи планування на основі базового плану завдання для транспортного засобу, що містить маршрут руху у вигляді набору геозон і часу, коли транспортний засіб має перебувати в них, наступне завантаження інформації про завдання для транспортного засобу по лінії зв'язку (наприклад, комп'ютерного, телефонного або іншого) у розташовувану на сервері систему контролю виконання завдань, періодичну передачу з розташованого на транспортному засобі мобільного термінального пристрою із приймачем супутникової глобальної системи позиціонування координат транспортного засобу й часу в систему контролю виконання завдань за допомогою лінії мобільного зв'язку, обчислення за допомогою математичного забезпечення системи контролю виконання завдань приналежності транспортного засобу до геозони в рамках завдання з аналізом попередніх станів (статусів) і визначення поточного стану (статусу) залежно від попередніх станів (статусів) і геозон після одержання чергових координат з розташованого на транспортному засобі мобільного термінального пристрою із приймачем супутникової глобальної системи позиціонування, зберігання й обробку інформації за допомогою математичного забезпечення в системі контролю виконання завдань і відображення через WEB-інтерфейс і передачу по лінії мобільного зв'язку на розташований на транспортному засобі мобільний термінальний пристрій із приймачем супутникової глобальної системи позиціонування й на мобільні термінальні пристрої спостерігачів для контролю знаходження транспортного засобу в заданий час у заданому стані (статусі). Після настання подій у систему контролю виконання завдань можуть передавати інформацію про стан транспортного засобу з мобільних термінальних пристроїв спостерігачів по лінії мобільного зв'язку і з інших систем або через WEB-інтрефейс по лінії комп'ютерного, телефонного або іншого зв'язку. Інформацію про завдання транспортного засобу можуть передавати по лінії мобільного зв'язку із системи контролю виконання завдань на розташований на транспортному засобі мобільний термінальний пристрій із приймачем супутникової глобальної системи позиціонування й на мобільні термінальні пристрої спостерігачів. Періодично після одержання системою контролю виконання завдань інформації про хід виконанні завдання для транспортного засобу цю інформацію можуть по лінії зв'язку (наприклад, через комп'ютерну мережу по лінії комп'ютерного зв'язку, по лінії телефонного або іншого зв'язку) направляти в систему планування й з урахуванням цієї інформації за допомогою математичного забезпечення системи планування генерувати нове завдання або вносити коректування в існуюче завдання для транспортного засобу й із системи планування по лінії зв'язку (наприклад, через комп'ютерну мережу по лінії комп'ютерного зв'язку, по лінії телефонного або іншого зв'язку) завантажувати в систему контролю виконання завдань, здійснювати зв'язок через WEB-інтерфейс із системою контролю виконання завдань по лінії зв'язку (наприклад, комп'ютерного, телефонного або іншого) і управляти завданнями, додавати завдання, видаляти завдання, спостерігати історію виконання завдання на карті. Розташований на транспортному засобі мобільний термінальний пристрій із приймачем супутникової глобальної системи позиціонування й мобільні термінальні пристрої спостерігачів можуть мати екрани, як мобільні термінальні пристрої, що мають екрани, можуть бути застосовані смартфони, і на екранах мобільних термінальних пристроїв можуть відображати поточне розташування транспортного засобу на мапі. Аналогічно можуть здійснювати контроль виконання завдань сукупністю транспортних засобів. На Фіг. 1 представлений фрагмент схеми системи тотального логістичного контролю процесу збирання, перевезення й переробки томатів, на Фіг. 2 представлена схема геозон, на Фіг. 3 представлена блок-схема тотального логістичного контролю. Як приклад здійснення способу контролю виконання завдань рухливими транспортними засобами може бути розглянуте функціонування системи тотального логістичного контролю 2 UA 96029 U 5 10 15 20 25 30 35 40 45 50 55 60 процесу збирання, перевезення й переробки томатів за допомогою створення завдань для транспортних засобів, їхньої видачі й контролю їхнього виконання. Завдання являє собою послідовний набір геозон, у які має потрапити транспортний засіб, і станів (статусів), у яких має знаходитися транспортний засіб; цей послідовний набір геозон і станів (статусів) регламентований часом, коли має початися й завершитися той або інший стан (статус). Геозона - це замкнутий полігон географічних координат (наприклад поле, територія заводу, територія перед заводом і т.п.) або послідовний набір координат (полілінія, наприклад дорога). Контрольований стан (статус) дозволяє ідентифікувати, що відбувається із транспортним засобом (наприклад їде на поле, перебуває на полі, завантажений, перебуває в буфері заводу, перебуває на вивантаженні, вивантажений). Приклад завдання: 10:00-11:00 Їде на поле (порожній) 11:00-12:00 Перебуває на поле 12:00 - Завантажений 12:00-13:00 Їде на завод (завантажений) 13:00-14:00 Перебуває в буфері заводу (очікує вивантаження) 14:00 - Вивантажений (кінець завдання) Система тотального логістичного контролю здійснює відстеження цих завдань для сукупності рухливих транспортних засобів (автомобілів) і подання зведених звітів про стан (статусі) всіх транспортних засобів, які дозволяють оцінити загальну ситуацію. Для здійснення способу контролю виконання завдань рухливими транспортними засобами необхідні: - установлюваний на транспортному засобі мобільний термінальний пристрій; як мінімум, це будь-який GPS-трекер, що дозволяє одержувати координати від супутникової глобальної системи позиціонування й передавати їх за допомогою мобільного зв'язку у систему контролю виконання завдань у реальному режимі часу; бажано, щоб цей пристрій мав також екран для виводу інформації (це може бути мобільний телефон, планшет, КПК, смартфон); - мобільні термінальні пристрої спостерігачів, які мають екрани (це можуть бути мобільні телефони, планшети, КПК, смартфони); - система контролю виконання завдань для збору інформації та взаємодії з мобільними термінальними пристроями; - програма для персонального комп'ютера, для створення завдань і відображення поточного стану (статусу) транспортного засобу; - програма для мобільних пристроїв, для відображення поточного стану (статусу) транспортного засобу; - WEB-pecypc, для створення завдань і відображення поточного стану (статусу) транспортного засобу. До складу системи тотального логістичного контролю входять розташовувана на сервері система контролю виконання завдань рухливими транспортними засобами 1, система планування 2, розташовані на рухливих транспортних засобах (перебувають у водіїв вантажних автомобілів) обладнані екранами мобільні термінальні пристрої із приймачами сигналів супутникової глобальної системи позиціонування (смартфони) 3, обладнані екранами мобільні термінальні пристрої спостерігачів (смартфони) 4, інші системи (наприклад система обліку 1С, вагарня, лабораторія) 5, система контролю виконання завдань 1 також має WEB-інтерфейс 6; WEB-інтерфейс 6, система планування 2 та інші системи 5 зв'язані із системою контролю виконання завдань 1 лініями зв'язку (наприклад компьютерного, телефонного або іншого) 7, мобільні термінальні пристрої (смартфони) 3 і 4 зв'язані із системою контролю виконання завдань 1 лініями мобільного зв'язку 8. Як геозони можна розглядати поле (геозона І), дорогу (геозона II), а також у зв'язку з їхніми значними розмірами різні ділянки заводської території: буфер перед заводом (геозона III), лабораторію вхідного контролю (геозона IV), вагарню (геозона V), буфер усередині заводу (геозона VI), місце вивантаження (геозона VII). Здійснення способу контролю виконання завдань рухливими транспортними засобами починають із того, що для кожного транспортного засобу за допомогою математичного забезпечення системи планування 2 на основі базового плану формують завдання, що містить маршрут руху у вигляді набору геозон і часу, коли цей транспортний засіб має перебувати в них, і по лінії зв'язку (наприклад комп'ютерного, телефонного або іншого) 7 інформацію про завдання для транспортного засобу завантажують у систему контролю виконання завдань 1. Із системи контролю виконання завдань 1 по лініях мобільного зв'язку 8 інформація про завдання для кожного транспортного засобу передається на розташовані на кожному транспортному засобі мобільний термінальний пристрій із приймачем сигналів супутникової глобальної системи 3 UA 96029 U 5 10 15 20 25 30 35 40 45 50 55 позиціонування (смартфони) 3 і на мобільні термінальні пристрої спостерігачів (смартфони) 4, а також по лінії зв'язку (наприклад комп'ютерного, телефонного або іншого) 7 на WEB-інтерфейс 6. Періодично (наприклад щохвилини) розташований на кожному транспортному засобі обладнаний екраном мобільний термінальний пристрій із приймачем супутникової глобальної системи позиціонування (смартфон) 3 визначає координати транспортного засобу й час і передає за допомогою лінії мобільного зв'язку 8 до системи контролю виконання завдань 1; після одержання системою контролю виконання завдань 1 чергових координат з розташованого на транспортному засобі мобільного термінального пристрою (смартфона) 3 за допомогою математичного забезпечення системи контролю виконання завдань 1 обчислюють приналежність транспортного засобу до геозони в рамках завдання, аналізують попередні стани (статуси) і визначають поточний стан (статус) залежно від попередніх станів (статусів) і геозон. Таким чином, у системі контролю виконання завдань 1 інформацію зберігають, обробляють за допомогою математичного забезпечення, по лінії зв'язку (наприклад комп'ютерного, телефонного або іншого) 7 передають на WEB-інтерфейс 6 і відображають через WEBінтерфейс 6 і по лінії мобільного зв'язку 8 передають на розташований на відповідному транспортному засобі мобільний термінальний пристрій (смартфон) 3 і на мобільні термінальні пристрої спостерігачів (смартфони) 4 для контролю знаходження транспортного засобу в заданий час у заданому стані (статусі) з відображенням на мапі через WEB-інтерфейс або на екранах мобільних термінальних пристроїв (смартфонів) 3 і 4. Після настання подій, як те прибуття транспортного засобу в яку-небудь геозону (наприклад на поле - у геозону І, або лабораторію вхідного контролю - у геозону IV, або на вагарню - у геозону V) або зміна стану (статусу) транспортного засобу (завантаження на полі - у геозоні І, проходження вхідного контролю в лабораторії вхідного контролю - у геозоні IV, зважування на вагарні - у геозоні V) з мобільних термінальних пристроїв спостерігачів-обліковців у полі (смартфонов) 4 за допомогою ліній мобільного зв'язку 8 і з інших систем (наприклад із системи обліку 1С, лабораторії, вагарні) 5 і через WEB-інтрефейс б по лінії зв'язку (наприклад комп'ютерного, телефонного або іншого) 7 у систему контролю виконання завдань 1 передають інформацію або уточнюючу інформацію про стан (статусі) транспортного засобу (завантажений, пройшов вхідний контроль, визначено вагу перед розвантаженням, визначено вага після розвантаження). Стан (статус) транспортного засобу може бути визначений по історії геозон і станів (статусів). Наприклад, визначення координат транспортного засобу, що перебуває на дорозі (геозона II), не дає інформації про те, завантажений він чи ні, і якщо з якої-небудь причини не було отримано інформації про подію "завантаження на полі", то стан (статус) може бути за допомогою математичного забезпечення системи контролю виконання завдань 1 визначений виходячи з того, що, наприклад, до цього транспортний засіб було порожнім у геозоні II (дорога), а потім перебував у геозоні І (поле), і, таким чином, він завантажений. Періодично після одержання системою контролю виконання завдань 1 інформації про хід виконанні завдання для транспортного засобу (одержання координат і визначення геозони знаходження транспортного засобу, визначення стану, або статусу, транспортного засобу) цю інформацію по лінії зв'язку (наприклад комп'ютерного, телефонного або іншого) 7 направляють у систему планування 2 і з урахуванням цієї інформації за допомогою математичного забезпечення системи планування 2 генерують нове завдання або вносять коректування в існуюче завдання для транспортного засобу й із системи планування 2 по лінії зв'язку (комп'ютерного, телефонного або іншого) 7 завантажують у систему контролю виконання завдань 1. Через WEB-інтерфейс 6 по лінії зв'язку (наприклад комп'ютерного, телефонного або іншого) 7 може здійснюватися зв'язок із системою контролю виконання завдань 1, що дає можливість управляти завданнями, додавати завдання, видаляти завдання, спостерігати історію виконання завдання на мапі. Корисна модель є здійсненною на сучасному рівні розвитку техніки, зокрема: система контролю виконання завдань виконана у вигляді Java ЕЕ додатка для сервера додатків JBoss, використовуючи базу даних Oracle; система планування виконана у вигляді конфігурації для 1С:Підприємство 8 (у варіанті 2014 року) або окремого додатка, що використовує базу даних MS SQL (у варіанті 2012 і 2013 років); мобільні термінальні пристрої на транспортних засобах і у спостерігачів (на даному етапі) використовуються з операційною системою Android 2 (і вище), для якої написаний відповідний мобільний додаток; WEB-інтерфейс організований на базі APEX, що входить до складу бази даних Oracle; інші системи спілкуються із системою контролю виконання завдань за кросплатформеним протоколом SOAP; всі вищеописані системи доступні й широко використовуються. 4 UA 96029 U 5 Спосіб контролю виконання завдань транспортними засобами дозволяє контролювати знаходження транспортного засобу в заданий час у заданому стані (статусі), дає можливість обчислення поточного стану (статусу) транспортного засобу залежно від попередніх станів (статусів) і геозон, забезпечує можливість автоматичного або ручного створення завдань, можливість доставки завдань на розташований на транспортному засобі мобільний термінальний пристрій, що відображає завдання водієві, а також можливість зміни завдання після його доставки або повторної доставки. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 25 30 35 40 45 50 55 1. Спосіб контролю виконання завдань рухливими транспортними засобами, що включає періодичне визначення за допомогою супутникової глобальної системи позиціонування координат знаходження й часу транспортного засобу, передачу цих даних з розташованого на транспортному засобі мобільного термінального пристрою із приймачем супутникової глобальної системи позиціонування на центральний диспетчерський пункт через систему мобільного зв'язку, обробку, зберігання й відображення інформації на центральному диспетчерському пункті, який відрізняється тим, що функції центрального диспетчерського пункту здійснюють за допомогою розташовуваної на сервері системи контролю виконання завдань, за допомогою математичного забезпечення системи планування на основі базового плану формують завдання для транспортного засобу, що містить маршрут руху у вигляді набору геозон і часу, коли транспортний засіб має перебувати в них, і по лінії зв'язку інформацію про завдання для транспортного засобу завантажують у систему контролю виконання завдань, з розташованого на транспортному засобі мобільного термінального пристрою із приймачем супутникової глобальної системи позиціонування координати транспортного засобу й час періодично передають у систему контролю виконання завдань за допомогою лінії мобільного зв'язку, після одержання чергових координат з розташованого на транспортному засобі мобільного термінального пристрою із приймачем супутникової глобальної системи позиціонування за допомогою математичного забезпечення системи контролю виконання завдань обчислюють приналежність транспортного засобу до геозони в рамках завдання, аналізують попередні стани (статуси) і визначають поточний стан (статус) залежно від попередніх станів (статусів) і геозон, у системі контролю виконання завдань інформацію зберігають, обробляють за допомогою математичного забезпечення й відображають через WEB-Інтерфейс і передають по лінії мобільного зв'язку на розташований на транспортному засобі мобільний термінальний пристрій із приймачем супутникової глобальної системи позиціонування й на мобільні термінальні пристрої спостерігачів для контролю знаходження транспортного засобу в заданий час у заданому стані (статусі). 2. Спосіб за п. 1, який відрізняється тим, що після настання подій у систему контролю виконання завдань передають інформацію про стан (статус) транспортного засобу з мобільних термінальних пристроїв спостерігачів і з інших систем за допомогою ліній мобільного або іншого зв'язку. 3. Спосіб за п. 1 або за п. 2, який відрізняється тим, що інформацію про завдання транспортного засобу по лінії мобільного зв'язку передають із системи контролю виконання завдань на розташований на транспортному засобі мобільний термінальний пристрій із приймачем супутникової глобальної системи позиціонування й на мобільні термінальні пристрої спостерігачів. 4. Спосіб за п. 1, який відрізняється тим, що періодично після одержання системою контролю виконання завдань інформації про хід виконання завдання для транспортного засобу, цю інформацію по лінії зв'язку направляють у систему планування й з урахуванням цієї інформації за допомогою математичного забезпечення системи планування, генерують нове завдання або вносять коректування в існуюче завдання для транспортного засобу й із системи планування по лінії зв'язку завантажують у систему контролю виконання завдань. 5. Спосіб за п. 1, який відрізняється тим, що через WEB-Інтерфейс здійснюють зв'язок із системою контролю виконання завдань і управляють завданнями, додають завдання, видаляють завдання, спостерігають історію виконання завдання на мапі. 6. Спосіб за п. 1, який відрізняється тим, що розташований на транспортному засобі мобільний термінальний пристрій із приймачем супутникової глобальної системи позиціонування й мобільні термінальні пристрої спостерігачів мають екрани. 7. Спосіб за п. 6, який відрізняється тим, що як обладнані екранами мобільні термінальні пристрої застосовують смартфони. 5 UA 96029 U 5 8. Спосіб за п. 6 або за п. 7, який відрізняється тим, що на екранах мобільних термінальних пристроїв відображають поточне розташування транспортного засобу на мапі. 9. Спосіб за п. 1 або за п. 2, або за п. 3, або за п. 4, або за п. 5, або за п. 6, або за п. 7, або за п. 8, який відрізняється тим, що здійснюють контроль виконання завдань сукупністю транспортних засобів. 6 UA 96029 U Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП“Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 7
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G08G 1/123
Мітки: рухливими, виконання, засобами, спосіб, транспортними, контролю, завдань
Код посилання
<a href="https://ua.patents.su/9-96029-sposib-kontrolyu-vikonannya-zavdan-rukhlivimi-transportnimi-zasobami.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю виконання завдань рухливими транспортними засобами</a>
Система контролю над транспортними засобами
Номер патенту: 62959
Опубліковано: 26.09.2011
Автори: Жимерук Сергій Сергійович, Жимерук Сергій Францович
МПК: G08G 1/00
Мітки: транспортними, засобами, контролю, система
Формула / Реферат:
1. Система контролю над транспортними засобами, що містить центральний сервер, до якого підключені базові сервери, передавальний пристрій, що має зв'язок з бортовим комп'ютером, розташованим на транспортному засобі, яка відрізняється тим, що бортовий комп'ютер забезпечений ідентифікаційним кодом і пристроєм авторизації абонента та підключений до системи навігації та датчиків контролю, при цьому бортовий комп'ютер забезпечений можливістю...
Універсальний ложемент для перевезення вантажів транспортними засобами
Номер патенту: 16426
Опубліковано: 15.08.2006
Автори: Биченко Олександр Іванович, Бондарев Сергій Володимирович, Трубачова Наталія Євгенівна, Донченко Анатолій Володимирович
МПК: B65D 63/00, B65D 19/00
Мітки: універсальний, перевезення, ложемент, вантажів, транспортними, засобами
Формула / Реферат:
Універсальний ложемент для перевезення вантажів транспортними засобами, який містить настил, ложементи і опорні вертикальні елементи, зв'язані з настилом, який відрізняється тим, що він являє собою набір опор різної довжини, кріплення опор до стін транспортного засобу здійснюється за допомогою гнучких елементів, одні кінці яких кріпляться фіксаторами до подовжніх сторін опор, а інші за допомогою фіксаторів кріпляться до стінок транспортного...
Гармошка для переходу між двома шарнірно з’єднаними транспортними засобами або трапа для пасажирів авіатранспорту
Номер патенту: 81962
Опубліковано: 25.02.2008
Автор: Кох Роберт
МПК: D06C 15/00, B60D 5/00
Мітки: переходу, двома, трапа, пасажирів, шарнірно, гармошка, авіатранспорту, транспортними, засобами, з'єднаними
Формула / Реферат:
Гармошка, зокрема для переходу між двома шарнірно з'єднаними транспортними засобами або трапа для пасажирів авіатранспорту, яка містить принаймні одну тканинну основу з синтетичних основних та утокових ниток, яка відрізняється тим, що тканинна основа виконана з майже повним перекриванням проміжків між основними та утоковими нитками, досягнутим пластичною обробкою тканинної основи шляхом її плющення.
Кулачковий контролер для керування підйомними і транспортними засобами
Номер патенту: 26996
Опубліковано: 10.10.2007
Автори: Мельніченко Георгій Васильовіч, Аксюта Ігор Григорович, Чернов Володимир Миколайович
МПК: H01H 77/00, H01H 19/00
Мітки: керування, засобами, транспортними, кулачковий, контролер, підйомними
Формула / Реферат:
Кулачковий контролер для керування підйомними і транспортними засобами, що містить литий корпус з кришкою, отворами під струмопідвідні і струмознімальні проводи і, приливками з отворами під елементи кріплення, усередині якого в підшипниках розміщений кулачковий барабан у вигляді вала з насадженими на нього кулачковими шайбами, по обидві сторони якого встановлені ізоляційні колодки, в яких з внутрішньої сторони змонтовані нерухомі електричні...
Тканинна основа гармошки, наприклад, переходу між двома шарнірно з’єднаними транспортними засобами або трапа для пасажирів авіатранспорту
Номер патенту: 30927
Опубліковано: 11.03.2008
Автор: Кох Роберт
МПК: B60D 5/00, B64F 1/00, D06C 15/00
Мітки: переходу, пасажирів, тканинна, наприклад, шарнірно, засобами, двома, транспортними, гармошки, основа, трапа, з'єднаними, авіатранспорту
Формула / Реферат:
1. Тканинна основа гармошки, наприклад, переходу між двома шарнірно з'єднаними транспортними засобами або трапа для пасажирів авіатранспорту, яка складається з синтетичних основних та утокових ниток, яка відрізняється тим, що тканинна основа є пластично здеформованою шляхом силового впливу на тканину.2. Тканинна основа за п. 1, яка відрізняється тим, що основна та утокова нитки є придатними до пластичного деформування. 3....
Попередній патент: Термостатичний клапан
Наступний патент: Спосіб діагностики пароксизмальної вегетативної недостатності у дітей при наявності патології шийного відділу хребта
Випадковий патент: Автоматизоване робоче місце для перевірки психофізіологічних показників військового льотчика