Підводний транспортний модуль

Формула / Реферат
1. Підводний транспортний модуль, що містить корпус (1), баластні ємності (2) з регульованою плавучістю і систему (3) закачування і викачування робочого середовища, за яке використовують забортну воду, який відрізняється тим, що корпус (1) виконаний обтічної форми і виготовлений з синтактику (композита на основі порожнистих скляних мікросфер), баластні ємності (2) виконані у вигляді багатоярусної баластної системи з безлічі сферичних резервуарів (4), кожен з яких складається з двох, скріплених між собою, півсфер (5), порожнини (6), сферичних резервуарів (4), сполучених між собою і з системою (3) закачування і викачування робочого середовища, при цьому підводний транспортний модуль додатково містить маршово-маневрові водометні рушії (7), пов'язані з системою (3) закачування і викачування робочого середовища.
2. Підводний транспортний модуль за п. 1, який відрізняється тим, що корпус (1) виконаний у вигляді моноліту або збірних блоків з синтактику, щільність якого не більше ρ=700 кг/м3, міцність на стиснення не менше σ=90 МПа у вигляді композита на основі зв′язуючого - поліефірних смол з наповнювачем у вигляді порожнистих скляних мікросфер розміром 0,01-10,0 мкм, а півсфери (5) виготовлені зі сталі з межею текучості не менше 1200 МПа.
3. Підводний транспортний модуль за п. 2, який відрізняється тим, що півсфери (5) сферичних резервуарів виконані з фланцями (8) і з отворами (9) в стінках, осі яких розташовані під кутом α=90° один до одного, в яких закріплені різьбові втулки (10), при цьому півсфери (5) між собою сполучені фланцями (8) і з'єднані болтовими з'єднаннями (11).
4. Підводний транспортний модуль за п. 3, який відрізняється тим, що суміжні сферичні резервуари (4) сполучені між собою за допомогою порожнистих різьбових стягувань (12).
5. Підводний транспортний модуль за будь-яким з пп. 1-4, який відрізняється тим, що багатоярусна баластна система залита синтактиком і разом з корпусом (1) являє собою монолітний блок (13).
6. Підводний транспортний модуль за будь-яким з пп. 1-5, який відрізняється тим, що додатково містить змінний навісний робочий орган (14) з приводом (15), приймальний і накопичувальний бункери (16) і (17), зв'язані між собою шнековим транспортером (18).
7. Підводний транспортний модуль за п. 6, який відрізняється тим, що додатково містить механізм вивантаження (19).
8. Підводний транспортний модуль за п. 1, який відрізняється тим, що система (3) закачування і викачування робочого середовища додатково містить насос (20) високого тиску з приводом (21), а привід (15) змінного робочого органу (14) виконаний у вигляді гідротурбіни, що гідравлічно пов'язана з системою (3) закачування і викачування робочого середовища.
9. Підводний транспортний модуль за п. 1, який відрізняється тим, що додатково містить систему автономного енергозабезпечення (22) і систему екстреного спливання (23).
Текст
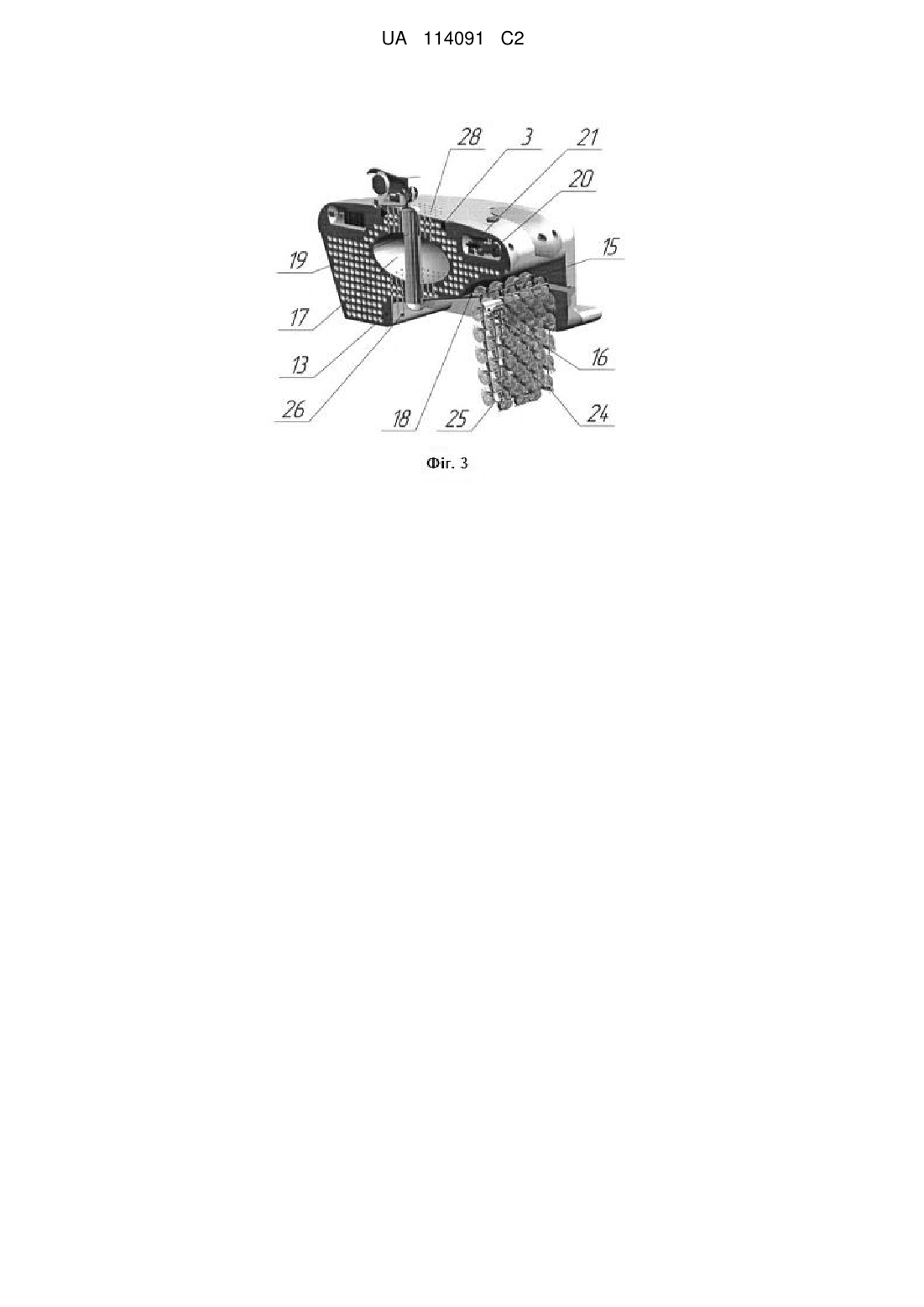
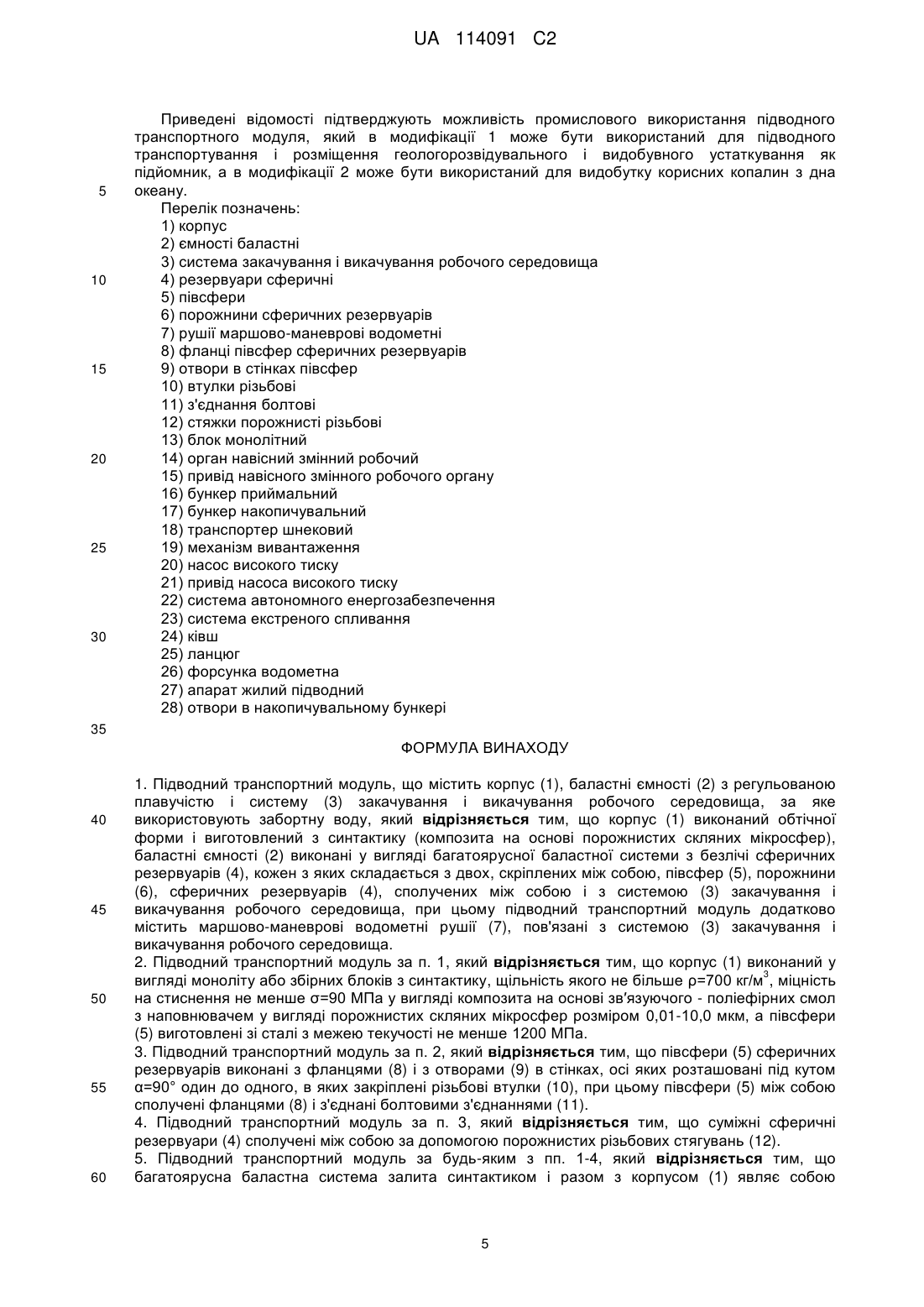
Реферат: Підводний транспортний модуль містить корпус (1), баластні ємності (2) з регульованою плавучістю і систему (3) закачування і викачування робочого середовища, за яке використовують забортну воду. Для підвищення міцності, плавучості та маневреності корпус (1) виконаний обтічної форми і виготовлений з синтактику (композита на основі порожнистих скляних мікросфер). Баластні ємності (2) виконані у вигляді багатоярусної баластної системи з безлічі сферичних резервуарів (4), кожен з яких складається з двох, скріплених між собою, півсфер (5). Порожнини (6) сферичних резервуарів (4) сполучені між собою і з системою (3) закачування і викачування робочого середовища. При цьому підводний транспортний модуль додатково містить маршово-маневрові водометні рушії (7), пов'язані з системою (3) закачування і викачування робочого середовища. UA 114091 C2 (12) UA 114091 C2 UA 114091 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до засобів глибоководного підводного транспортування при видобутку корисних копалин і може бути використаний для розміщення геологорозвідувального і видобувного устаткування. Основними вимогами, що пред'являються до технологій для видобутку корисних копалин, є надійність і зниження екологічного збитку, обумовленого переміщенням придонних мінералізованих вод з мулом на поверхню разом з корисними копалинами і скиданням відходів видобутку в поверхневі шари океану. Промислові апарати для збору залізомарганцевих конкрецій повинні забезпечувати наступні вимоги: 2 - обробка площ дна зі швидкістю 10-15 м /с; - безаварійне переміщення і робота за наявності в місці збору невиявлених перешкод. Для забезпечення ефективному збору залізомарганцевих конкрецій в автоматизованому режимі, середня швидкість апарата збору може бути не більше 0,5 м/с, а корпус апарата повинен переміщатися над дном, на висоті близько 5 м. З рівня техніки відомі засоби для розміщення геологорозвідувального і видобувного устаткування, до яких належать: "FREE-FALL BOTTOM SAMPLER" US3572129 (A) (BEAR CREEK MINING CO) 23.03.1971; "APPARATUS AND PROCESS FOR UNDERSEA MINING OF MINERAL BEARING SAND AND GRAVEL" US3731975 (A) (QVA CORP, US) 08.07.1973. Відомі засоби мають велику масу і недостатню міцність, що обмежує їх застосування для роботи на великих глибинах до 6000 м. З рівня техніки відомий найбільш близький за призначенням підводний транспортний модуль, що містить корпус, баластні ємності з регульованою плавучістю і систему закачування і викачування робочого середовища, за яке використовується забортна вода ["Подводная платформа" RU2182212 (C2) (10.05.2002]. Рама модуля виконана з елементів арочної конструкції у формі зрізаної тригранної піраміди, а опори виконані V-подібної форми і жорстко закріплені на рамі, при цьому у верхній частині рами для забезпечення плавучості закріплені блоки пінополіуретану. Баластні ємності модуля виконані у вигляді понтона у формі тора і відрізків труб. Недоліком відомого модуля є його невисокі міцність, плавучість і маневреність, що не дозволяє використовувати його на великих глибинах до 6000 м. В основу винаходу поставлена задача створення такого підводного транспортного модуля, конструкція якого забезпечувала б можливість надійного і екологічно безпечного використання на великих глибинах за рахунок підвищення міцності, плавучості і маневреності. Поставлена задача вирішується тим, що у підводному транспортному модулі, що містить корпус, баластні ємності з регульованою плавучістю і систему закачування і викачування робочого середовища, за яке використовується забортна вода, згідно з винаходом, корпус виконаний обтічної форми і виготовлений з синтактику (композита на основі порожнистих скляних мікросфер, щільність якого менша за щільність води), баластні ємності виконані у вигляді багатоярусної баластної системи з безлічі сферичних резервуарів, кожен з яких складається з двох, скріплених між собою півсфер, порожнини сферичних резервуарів сполучені між собою і з системою закачування і викачування робочого середовища, при цьому підводний транспортний модуль додатково містить маршово-маневрові водометні рушії, пов'язані з системою закачування і викачування робочого середовища. Виготовлення корпусу з синтактику (композита на основі порожнистих скляних мікросфер, щільність якого менше щільності води), виконання баластних ємностей у вигляді багатоярусної баластної системи з безлічі сферичних резервуарів, кожен з яких складається з двох скріплених між собою півсфер, а також сполучення порожнин сферичних резервуарів між собою і з системою закачування і викачування робочого середовища, забезпечує оптимальне співвідношення маси, міцності, плавучості і маневреності модуля. Наявність маршово-маневрових водометних рушіїв, пов'язаних з системою закачування і викачування робочого середовища, забезпечує переміщення і маневрування підводного транспортного модуля при виконанні різних технологічних операцій на заданій глибині при нульовій плавучості, наприклад, на висоті біля 5 м, що знижує шкідливу дію технологічних процесів на навколишнє середовище. Таким чином, конструкція підводного транспортного модуля, що заявляється, забезпечує оптимальне співвідношення маси, міцності, плавучості і маневреності при яких можливо екологічно безпечне виконання різних технологічних процесів на великих глибинах до 6000 м. Підводний транспортний модуль має додаткові відмінності, які підвищують або створюють додатковий технічний результат. 1 UA 114091 C2 5 10 15 20 25 30 35 40 45 50 55 Виконання корпусу у вигляді моноліту або збірних окремих блоків з синтактику щільність 3 якого не більше ρ=700 кг/м , міцність на стиснення не менше σ=90 МПа у вигляді композита на основі зв'язуючого - поліефірних смол з наповнювачем у вигляді порожнистих скляних мікросфер розміром 0,01-10,0 мкм, а також виготовлення півсфер зі сталі з межею текучості не менше 1200 МПа забезпечує підводному транспортному модулю високу міцність і плавучість. Виконання півсфер сферичних резервуарів з фланцями і отворами в стінках, осі яких розташовані під кутом α=90° один до одного, в яких закріплені різьбові втулки, при цьому півсфери між собою сполучені фланцями і з'єднані болтовими з'єднаннями, забезпечує можливість швидкого монтажу всього комплексу в процесі виготовлення. В підводному транспортному модулі суміжні сферичні резервуари сполучені між собою за допомогою порожнистих різьбових стягувань. Таке виконання забезпечує формування стільникової конструкції багатоярусної баластної системи зі сферичних резервуарів, що скорочує трудомісткість їх монтажу і демонтажу і підвищує ремонтопридатність. В підводному транспортному модулі багатоярусна баластна система залита синтактиком і разом з корпусом являє собою монолітний блок. Така компоновка забезпечує зручність монтажу баластної системи всередині корпусу. Підводний транспортний модуль додатково містить змінний навісний робочий орган з приводом, приймальний і накопичувальний бункери, зв'язані між собою шнековим транспортером і механізмом вивантаження. Система закачування і викачування робочого середовища додатково містить насос високого тиску з приводом, а привід змінного робочого органу виконаний у вигляді гідротурбіни, що гідравлічно пов'язана з системою закачування і викачування робочого середовища з багатоярусної стільникової системи, систему автономних пересувних блоків енергозабезпечення і систему незалежного екстреного спливання, що підвищує надійність і дозволяє за короткий час проводити заміну енергоблоків і технічне обслуговування устаткування. Таке удосконалення забезпечує формування на борту підводного транспортного модуля ефективного видобувного агрегату для збору корисних копалин, з пересувними системами енергозабезпечення і безпечного екстреного спливання при виникненні нештатної ситуації. Суть винаходу пояснюють креслення. - на фіг. 1 зображений підводний транспортний модуль (загальний вигляд); - на фіг. 2 зображений підводний транспортний модуль з жилим підводним апаратом; - на фіг. 3 зображений поздовжній розріз підводного транспортного модуля; - на фіг. 4 зображений сферичний резервуар багатоярусної баластної системи; - на фіг. 5 зображена багатоярусна баластна система; - на фіг. 6 зображений підводний транспортний модуль в транспортному положенні. Підводний транспортний модуль (фіг. 1) містить корпус 1, баластні ємності 2 у вигляді багатоярусної баластної системи (фіг. 2) і систему 3 закачування і викачування робочого середовища, за яке використовується забортна вода. Багатоярусна баластна система складається з безлічі сферичних резервуарів 4 (фіг. 4), кожен з яких складається з двох, скріплених між собою, півсфер 5 (фіг. 5), при цьому порожнини 6 сферичних резервуарів 4 багатоярусної баластної системи сполучені між собою і з системою 3 закачування і викачування робочого середовища, для додання модулю негативної плавучості при зануренні, або позитивної плавучості при спливанні, або нульової плавучості при зануренні на задану робочу глибину, або стабілізації глибини занурення при зміні маси модуля. Корпус 1 виконаний обтічної форми у вигляді монолітуабо збірних окремих блоків і виготовлений з синтактику, а півсфери 5 сферичних резервуарів 4 багатоярусної баластної системи виготовлені із сталі з межею текучості не менше 1200 МПа. Півсфери 5 сферичних резервуарів 4 багатоярусної баластної системи виконані з фланцями 8 (фіг. 4) і з отворами 9 в стінках, осі яких розташовані під кутом α=90° один до одного, у яких закріплені різьбові втулки 10, при цьому півсфери 5 між собою зв'язані фланцями 8, сполучені болтовими з'єднаннями 11 і в зборі утворюють сферичні резервуари 4 багатоярусної баластної системи. Суміжні сферичні резервуари 4 багатоярусної баластної системи сполучені між собою за допомогою порожнистих різьбових стягувань 12 (фіг. 5), за допомогою яких вони сполучені з різьбовими втулками 10 півсфер 5. Багатоярусна баластна система залита композиційним синтактиком і разом з корпусом 1 являє собою монолітний блок 13 (фіг. 3). 2 UA 114091 C2 5 10 15 20 25 30 35 40 45 50 55 Модуль додатково містить маршово-маневрові водометні рушії 7 (фіг. 1), пов'язані з системою 3 закачування і викачування робочого середовища для маневрування і переміщення модуля. У такій комплектації (модифікація 1) підводний транспортний модуль може виконувати транспортні і підйомні операції на глибині до 6000 м. Для видобутку і транспортування корисних копалин (модифікація 2) підводний транспортний модуль може додатково містити один із змінних навісних робочих органів 14 (фіг. 1) з приводом 15 (фіг. 6), приймальний бункер 16 (фіг. 3) і накопичувальний бункер 17, зв'язані між собою шнековим транспортером 18, а також механізмом вивантаження 19. Це забезпечує ефективний збір корисних копалини, таких як залізомарганцеві конкреції. Система 3 закачування і викачування робочого середовища додатково містить насос 20 високого тиску з приводом 21 (фіг. 3). Привід 15 змінного робочого органу 14 виконаний у вигляді гідротурбіни, гідравлічно пов'язаною з системою 3. Підводний транспортний модуль може бути оснащений системою 22 автономного енергозабезпечення і системою 23 екстреного спливання (фіг. 1). Навісний робочий орган 14 може бути виконаний у вигляді ланцюгового конвеєра з ковшами 24 і ланцюгами 25 (фіг. 3). Ковші 24 шарнірно закріплені на ланцюзі 25 з можливістю пружного повороту при контакті з перешкодою під час переміщення модуля і з можливістю повернення їх в початкове положення. Ковші 24 можуть бути виконані з безлічі зв'язаних між собою ланцюгів. Підводний транспортний модуль в такій комплектації (модифікація 2) при розробці корисних копалини і за наявності змінного навісного робочого органу 14 знаходиться в стані нульової плавучості на відстані приблизно 5 м від дна і може працювати на глибині до 6000 м. У міру завантаження накопичувального бункера 17 і збільшення маси модуля система 3 закачування і викачування робочого середовища реагує на ці зміни, викачує воду і постійно підтримує робочу висоту на рівні 5 м над океанічним дном. На дні корпусу 1 розташовані водометні форсунки 26 (фіг. 3). Підводний транспортний модуль може бути оснащений жилим підводним апаратом 27 (фіг. 2). У бункері зберігання конкрецій виконані отвори 28 (фіг. 3). Пристрій працює наступним чином. Початкове положення модуля - на поверхні акваторії біля базового судна. Під час розвантаження після попереднього робочого циклу відбувається включення насоса 20 системи 3 закачування робочого середовища у багатоярусну баластну систему. Після розвантаження і при досягненні заданої негативної плавучості відбувається кероване занурення модуля на дно акваторії. Підводний транспортний модуль в модифікації 1 працює як транспортувальник вантажів або підводних об'єктів. Підводний транспортний модуль в модифікації 2 працює як автономний добувний апарат. При досягненні заданої глибини занурення (висота 5 м над дном) забезпечується робоче переміщення і маневрування модуля при виконанні різних технологічних операцій на заданій глибині при нульовій плавучості. Маршово-маневрові водометні рушії 7 забезпечують йому автономне переміщення по траєкторії в смузі руху. Включається привід 15 робочого органу 14 і відбувається збір залізомарганцевих конкрецій в приймальний бункер 16 і переміщення в накопичувальний бункер 17. Ланцюги 25 робочого органу 14 з ковшами 24 рухаються відносно корпусу 1 за допомогою регульованого приводу 15 і, звисаючи, ковзають по дну. Ковші 24 зачерпують залізомарганцеві конкреції разом з шаром мула, при цьому мул протікає через ґратчасті стінки і дно ковшів 24, а залізомарганцеві конкреції транспортуються в накопичувальний бункер 17. Модуль такої конструкції може долативиступи заввишки до 1,5…2 м, не припиняючи збору залізомарганцевих конкрецій, при цьому ланцюги 25 з ковшами 24 ковзають по поверхні виступів. Западини і міжгір'я будь-яких розмірів не є перешкодами для пересування модуля навіть при складному рельєфі дна, оскільки ковші 24 шарнірно закріплені на ланцюзі 25, що забезпечують можливість їх пружного повороту при контакті з перешкодою і повернення в початкове положення. 3 UA 114091 C2 5 10 15 20 25 30 35 40 45 50 55 Оперативне управління швидкістю ланцюга 25 і висотою модуля над ґрунтом забезпечує можливість оперативного управління швидкістю пересування підводного пересувного модуля. При виконанні робіт підводного транспортного модуля ланцюги 25 знаходяться в робочому положенні (фіг. 1), а при зануренні і підйомі підводного транспортного модуля ланцюги 25 знаходяться в транспортному положенні (фіг. 6). Водометні форсунки 26, що розташовані на плавниках корпуса 1, забезпечують можливість переміщення біомаси і бентосних організмів, які можуть знаходитися на поверхні залізомарганцевих конкрецій, із зони технологічних робіт в сторони від проходження ланцюгових ковшів, що дозволяє понизити шкідливу дію на навколишнє середовище при виконанні робіт. Управління роботою підводного транспортного модуля може здійснюватися з двох пересувних пунктів управління. У першому пункті управління встановлюють устаткування для управління підводним транспортним модулем: гідролокатор з боковим оглядом інтерферометричного типу, фронтальний ехолот, гідролокатор з круговим оглядом і гідролокатор з багатопроменевим, профілограф. Ці системи дозволяють отримувати характеристики дна для управління рухом. Система навігації може бути обладнана бортовою супутниковою і гідроакустичною системами. Компенсована доплерінерційна бортсистема дозволяє проводити коригування за допомогою даних доплерівського лагу, де відносно ґрунту і води змінюється швидкість модуля. Ці дані дозволяють підтримувати глибину, необхідну для виконання видобувних робіт. Для пересування модуля в надводному положенні використовується система DPRS. Система гідроакустичної навігації дозволяє визначити місцеположення модуля відносно донних маяків. Другий пункт управління може бути розташований на підводному транспортному модулі для виконання завдань з використанням відеозображення з відеокамер модуля. На верхній частині підводного транспортного модуля може бути встановлений майданчик, на якому можуть розташовуватися різні типи жилих підводних апаратів 27 з робочою глибиною занурення до 6000 метрів. Майданчик може бути обладнаний системою передачі даних на підводний жилий апарат 27, на якому відбувається управління модулем в ручному режимі за допомогою відеозображення. Жилий підводний апарат 27 може спливати разом з підводним транспортним модуле, або за програмою екстреного спливання в автономному режимі. Підводний транспортний модуль, що заявляється, перешкоджає переміщенню мула і донної води на поверхню, оскільки в накопичувальному бункері 17 є отвори 28, через які при спливанні транспортного модуля відбувається проходження забортної води, що створює постійний обмін і витіснення водних шарів при спливанні. Робота ведеться безпосередньо з залізомарганцевими конкреціями на відстані 3…5 метрів до дна, залежно від нахилу дна, спеціальними ланцюговими ковшами 24, які збирають тільки залізомарганцеві конкреції і складують їх в приймальний бункер 16, не руйнуючи їх. Після збору заданої кількості залізомарганцевих конкрецій відбувається спливання модуля з подальшим розвантаженням на базовому судні. Система 22 автономного енергозабезпечення модуля може складатися з трьох незалежних пересувних блоків, у кожному блоці розташований двигун, паливні баки, генератор, насосна система високого тиску, система управління, навігаційне устаткування. Всі елементи системи енергозабезпечення знаходяться в спеціальній ємності і залиті композиційними синтактиком і являє собою монолітний блок з люками для обслуговування. У разі виходу з ладу одного енергоблока, два ті, що залишилися, можуть працювати на екстрене спливання підводного транспортного модуля, у разі виходу з ладу двох енергоблоків, енергоблок, що залишився, забезпечить екстрене спливання підводного транспортного модуля. У разі виходу з ладу всіх енергоблоків, у модулі передбачена система 23 автономного спливання, яка має систему акумуляторів і може провести відкачування води з баластної системи для забезпечення транспортному модулю позитивної плавучості. Технічне обслуговування енергоблоків можна проводити шляхом заміни і ремонту блоків на судні. Проектна вантажопідйомність підводного транспортного модуля складає 300 тонн. З підводних транспортних модулів (модифікація 2) може бути сформований видобувний комплекс. До складу видобувного комплексу може входити два судна - рудовоза і два підводних транспортних модуля (модифікація 2) - автономних видобувних апарата. Використання винаходу, що заявляється, найефективніше при будівництві підводних транспортних модулів вантажопідйомністю до 1000 тонн. 4 UA 114091 C2 5 10 15 20 25 30 Приведені відомості підтверджують можливість промислового використання підводного транспортного модуля, який в модифікації 1 може бути використаний для підводного транспортування і розміщення геологорозвідувального і видобувного устаткування як підйомник, а в модифікації 2 може бути використаний для видобутку корисних копалин з дна океану. Перелік позначень: 1) корпус 2) ємності баластні 3) система закачування і викачування робочого середовища 4) резервуари сферичні 5) півсфери 6) порожнини сферичних резервуарів 7) рушії маршово-маневрові водометні 8) фланці півсфер сферичних резервуарів 9) отвори в стінках півсфер 10) втулки різьбові 11) з'єднання болтові 12) стяжки порожнисті різьбові 13) блок монолітний 14) орган навісний змінний робочий 15) привід навісного змінного робочого органу 16) бункер приймальний 17) бункер накопичувальний 18) транспортер шнековий 19) механізм вивантаження 20) насос високого тиску 21) привід насоса високого тиску 22) система автономного енергозабезпечення 23) система екстреного спливання 24) ківш 25) ланцюг 26) форсунка водометна 27) апарат жилий підводний 28) отвори в накопичувальному бункері 35 ФОРМУЛА ВИНАХОДУ 40 45 50 55 60 1. Підводний транспортний модуль, що містить корпус (1), баластні ємності (2) з регульованою плавучістю і систему (3) закачування і викачування робочого середовища, за яке використовують забортну воду, який відрізняється тим, що корпус (1) виконаний обтічної форми і виготовлений з синтактику (композита на основі порожнистих скляних мікросфер), баластні ємності (2) виконані у вигляді багатоярусної баластної системи з безлічі сферичних резервуарів (4), кожен з яких складається з двох, скріплених між собою, півсфер (5), порожнини (6), сферичних резервуарів (4), сполучених між собою і з системою (3) закачування і викачування робочого середовища, при цьому підводний транспортний модуль додатково містить маршово-маневрові водометні рушії (7), пов'язані з системою (3) закачування і викачування робочого середовища. 2. Підводний транспортний модуль за п. 1, який відрізняється тим, що корпус (1) виконаний у 3 вигляді моноліту або збірних блоків з синтактику, щільність якого не більше ρ=700 кг/м , міцність на стиснення не менше σ=90 МПа у вигляді композита на основі зв′язуючого - поліефірних смол з наповнювачем у вигляді порожнистих скляних мікросфер розміром 0,01-10,0 мкм, а півсфери (5) виготовлені зі сталі з межею текучості не менше 1200 МПа. 3. Підводний транспортний модуль за п. 2, який відрізняється тим, що півсфери (5) сферичних резервуарів виконані з фланцями (8) і з отворами (9) в стінках, осі яких розташовані під кутом α=90° один до одного, в яких закріплені різьбові втулки (10), при цьому півсфери (5) між собою сполучені фланцями (8) і з'єднані болтовими з'єднаннями (11). 4. Підводний транспортний модуль за п. 3, який відрізняється тим, що суміжні сферичні резервуари (4) сполучені між собою за допомогою порожнистих різьбових стягувань (12). 5. Підводний транспортний модуль за будь-яким з пп. 1-4, який відрізняється тим, що багатоярусна баластна система залита синтактиком і разом з корпусом (1) являє собою 5 UA 114091 C2 5 10 монолітний блок (13). 6. Підводний транспортний модуль за будь-яким з пп. 1-5, який відрізняється тим, що додатково містить змінний навісний робочий орган (14) з приводом (15), приймальний і накопичувальний бункери (16) і (17), зв'язані між собою шнековим транспортером (18). 7. Підводний транспортний модуль за п. 6, який відрізняється тим, що додатково містить механізм вивантаження (19). 8. Підводний транспортний модуль за п. 1, який відрізняється тим, що система (3) закачування і викачування робочого середовища додатково містить насос (20) високого тиску з приводом (21), а привід (15) змінного робочого органу (14) виконаний у вигляді гідротурбіни, що гідравлічно пов'язана з системою (3) закачування і викачування робочого середовища. 9. Підводний транспортний модуль за п. 1, який відрізняється тим, що додатково містить систему автономного енергозабезпечення (22) і систему екстреного спливання (23). 6 UA 114091 C2 7 UA 114091 C2 Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 8
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B63B 35/00, E21C 50/00, B63B 1/02, E02F 3/08, B63B 1/16, B63B 3/13
Мітки: транспортний, підводний, модуль
Код посилання
<a href="https://ua.patents.su/10-114091-pidvodnijj-transportnijj-modul.html" target="_blank" rel="follow" title="База патентів України">Підводний транспортний модуль</a>
Високошвидкісний транспортний модуль
Номер патенту: 60087
Опубліковано: 15.09.2003
Автор: Юніцкій Анатолій Едуардович
МПК: B62D 37/00, B62D 35/00
Мітки: високошвидкісний, транспортний, модуль
Формула / Реферат:
1. Високошвидкісний транспортний модуль, що містить кузов обтічної форми з плавно сполученими між собою сфероподібною передньою, краплеподібною середньою, яка має сплощену нижню поверхню, і конусоподібною задньою частинами, а також встановлені в нижній частині кузова в два ряди, зв'язані з приводом колеса, який відрізняється тим, що задня конусоподібна частина кузова в подовжньому напрямку виконана знакозмінної кривизни, а її закінченність...
Транспортний cng-модуль
Номер патенту: 42693
Опубліковано: 10.07.2009
Автори: Зайцев Валерій Володимирович, Зайцев Володимир Васильович, Крижанівський Євстахій Іванович, Зайцев Дмитро Володимирович
Мітки: cng-модуль, транспортний
Формула / Реферат:
Транспортний CNG-модуль, що складається зі стандартного морського прямокутного контейнера з газонепроникними дверима, який відрізняється тим, що його стінки захищені теплоізоляцією для підтримування експлуатаційної температури 15...20 °С, всередині горизонтально розташований ряд циліндричних ємностей високого тиску зі сферичними закінченнями різного об'єму, вкладених у касету з фіксуючих рамок, перпендикулярних до повздовжніх осей ємностей,...
Транспортний модуль
Номер патенту: 22074
Опубліковано: 30.04.1998
Автор: Пашков Євген Валентинович
МПК: B23Q 7/16, B65G 25/04
Мітки: модуль, транспортний
Формула / Реферат:
1. Транспортный модуль, содержащий основание с направляющими и помещенную между ними с гарантированным зазором каретку, снабженную установочным элементом для объектов производства, отличающийся тем, что на внутренних поверхностях направляющих закреплены по всей длине стержневые постоянные магниты, плоскость расположения которых находится над плоскостью расположения обращенных к ним одноименных полюсов магнитов, закрепленных на каретке, в...
Підводний робот
Номер патенту: 26282
Опубліковано: 10.09.2007
Автори: Данильченко Ігор Євгенович, Данильченко Наталя В'ячеславівна, Родічева Надія Іванівна, Пишнєв Сергій Миколайович
МПК: B63G 8/00
Формула / Реферат:
Підводний робот, що має міцні корпуси, корпус з відеокамерою, рушійні пристрої, корпус з технологічним обладнанням, який відрізняється тим, що окремі конструктивні елементи виконані у вигляді функціональних модулів і з'єднані між собою за допомогою з'єднувального модуля з універсальним вузлом кріплення.
Підводний апарат
Номер патенту: 22027
Опубліковано: 10.04.2007
Автори: Штефирца Анна Іллівна, Галь Анатолій Феодосійович, Бугаєнко Борис Андрійович, Блінцов Володимир Степанович, Дубіна Марина Олександрівна
МПК: B63G 8/00
Формула / Реферат:
Підводний апарат, що містить міцний корпус у вигляді порожнистих носової і кормової сфер, послідовно з'єднаних між собою перехідним люком і поміщених у легкий обтічний корпус, і/чи циліндрів зі сферичними кінцевими частинами, а також горизонтальний рушійно-стерновий комплекс, розташований у кормі підводного апарата, який відрізняється тим, що горизонтальний рушійно-стерновий комплекс виконано з одного чи декількох центральних маршових...
Попередній патент: Сполуки, що інгібують металоферменти
Наступний патент: Спосіб перевантаження автомобільних модулів на залізничних платформах різної ширини колії
Випадковий патент: Спосіб скошеного анастомозування при странгуляційній товстокишковій непрохідності