Спосіб визначення орієнтації рухомого об’єкта та пристрій для його реалізації
Формула / Реферат
1. Спосіб визначення орієнтації рухомого об'єкта, коли на рухомому об'єкті розміщують реперні елементи контрольовано відносно вектора орієнтації рухомого об'єкта, а за допомогою оптико-локаційного засобу, що складається з М![]() 2 оптико-електронних локаційних блоків, розміщеного на нерухомому об'єкті, проводять виміри сигналів, що характеризують просторове положення реперних елементів, використовуючи які визначають просторову орієнтацію рухомого об'єкта, який відрізняється тим, що розміщення реперних елементів проводять так, щоб при зміні орієнтації рухомого об'єкта сигнали хоча б двох реперних елементів в полі зору одного з оптико-електронних локаційних блоків співпадали, а визначені при цьому параметри сигналів, що співпадають, використовують для оцінки дієздатності пристрою визначення орієнтації рухомого об'єкта.
2 оптико-електронних локаційних блоків, розміщеного на нерухомому об'єкті, проводять виміри сигналів, що характеризують просторове положення реперних елементів, використовуючи які визначають просторову орієнтацію рухомого об'єкта, який відрізняється тим, що розміщення реперних елементів проводять так, щоб при зміні орієнтації рухомого об'єкта сигнали хоча б двох реперних елементів в полі зору одного з оптико-електронних локаційних блоків співпадали, а визначені при цьому параметри сигналів, що співпадають, використовують для оцінки дієздатності пристрою визначення орієнтації рухомого об'єкта.
2. Пристрій для визначення орієнтації рухомого об'єкта відносно нерухомого об'єкта, що має в своєму складі N реперних джерел випромінювання, де N![]() 2, які розташовані на рухомому об'єкті орієнтовано відносно вектора орієнтації об'єкта, а на нерухомому об'єкті - М оптико-локаційних блоків, де М
2, які розташовані на рухомому об'єкті орієнтовано відносно вектора орієнтації об'єкта, а на нерухомому об'єкті - М оптико-локаційних блоків, де М![]() 2, блок формування даних орієнтації рухомого об'єкта, який відрізняється тим, що доповнений блоком визначення однакових параметрів сигналів оптико-локаційних блоків та блоком оцінки похибки вихідних сигналів пристрою, причому входи блока визначення однакових сигналів з'єднані з виходами оптико-локаційних блоків, а його виходи з'єднані з першими входами блока оцінки похибки, другі входи якого з'єднані з виходами блока формування даних орієнтації, причому вихід блока оцінки похибки є додатковим виходом пристрою.
2, блок формування даних орієнтації рухомого об'єкта, який відрізняється тим, що доповнений блоком визначення однакових параметрів сигналів оптико-локаційних блоків та блоком оцінки похибки вихідних сигналів пристрою, причому входи блока визначення однакових сигналів з'єднані з виходами оптико-локаційних блоків, а його виходи з'єднані з першими входами блока оцінки похибки, другі входи якого з'єднані з виходами блока формування даних орієнтації, причому вихід блока оцінки похибки є додатковим виходом пристрою.
3. Пристрій для визначення орієнтації рухомого об'єкта за п. 2, який відрізняється тим, що блок визначення однакових параметрів сигналів оптико-локаційних блоків містить схему порівняння, комутатор, причому входи схеми порівняння з'єднані з виходами оптико-локаційних блоків, а її вихід з'єднаний з керуючим входом комутатора, комутуючі входи якого з'єднані з виходами оптико-локаційних блоків та першим входом блока оцінки похибки.
4. Пристрій для визначення орієнтації рухомого об'єкта за п. 2, який відрізняється тим, що блок оцінки похибки вихідних сигналів містить вузол функціонального віднімання, схему порівняння, регістр пам'яті значення допуску на похибку, причому перший вхід вузла функціонального віднімання з'єднаний з виходом самого пристрою, його другий вхід з'єднаний з виходом блока визначення однакових сигналів оптико-локаційних блоків, а його вихід з'єднаний з першим входом схеми порівняння, другий вхід якої з'єднаний з регістром пам'яті, а її вихід є додатковим виходом пристрою.
Текст
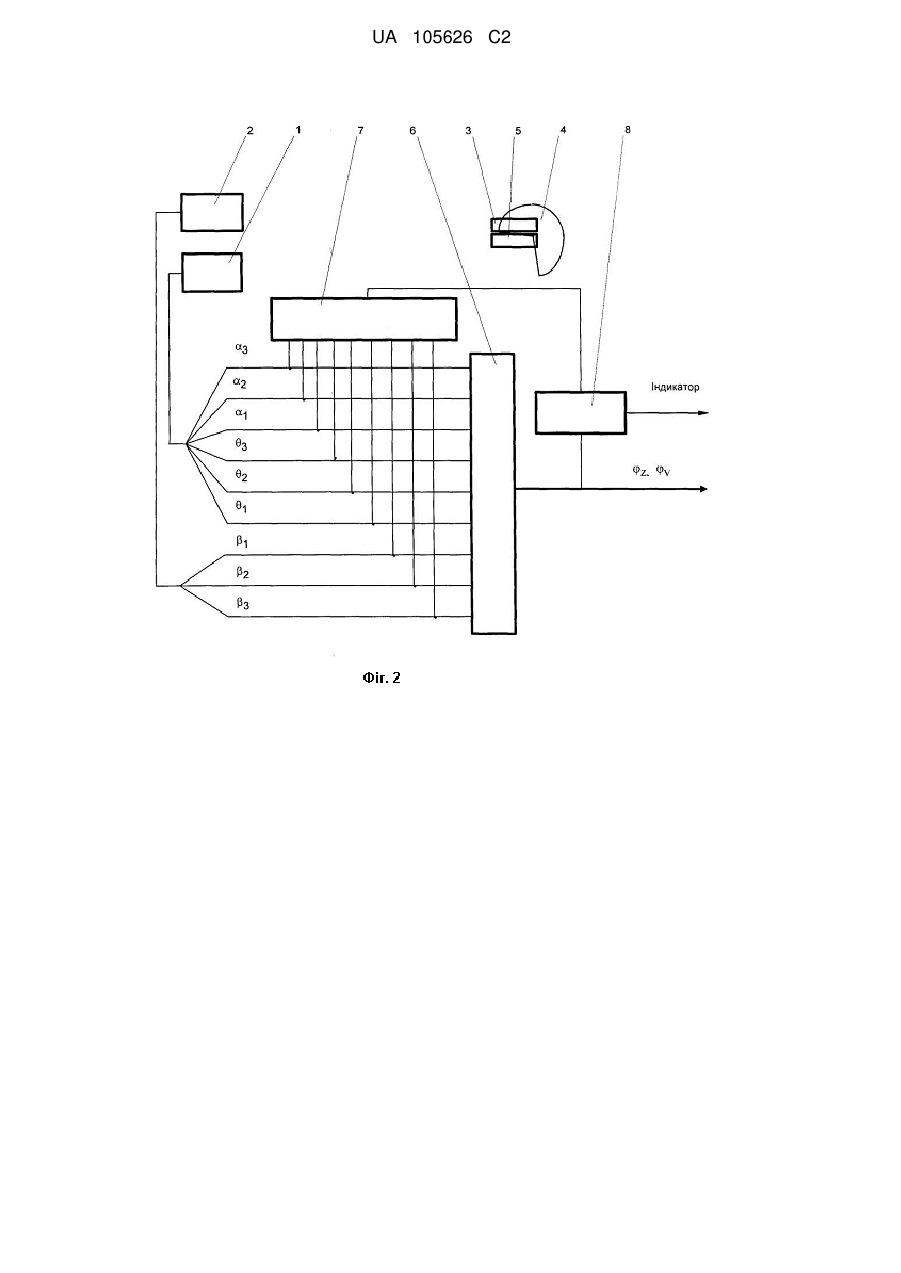
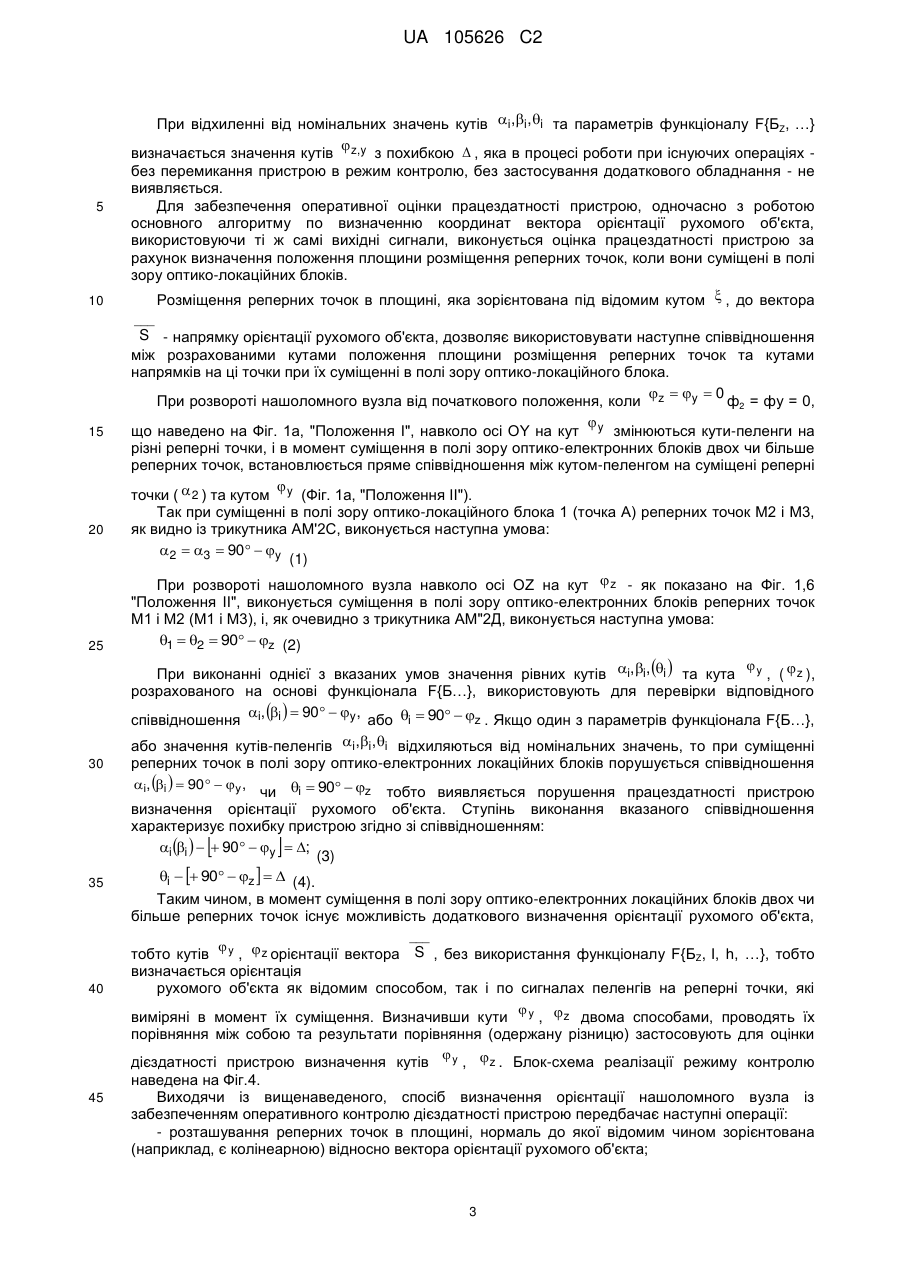
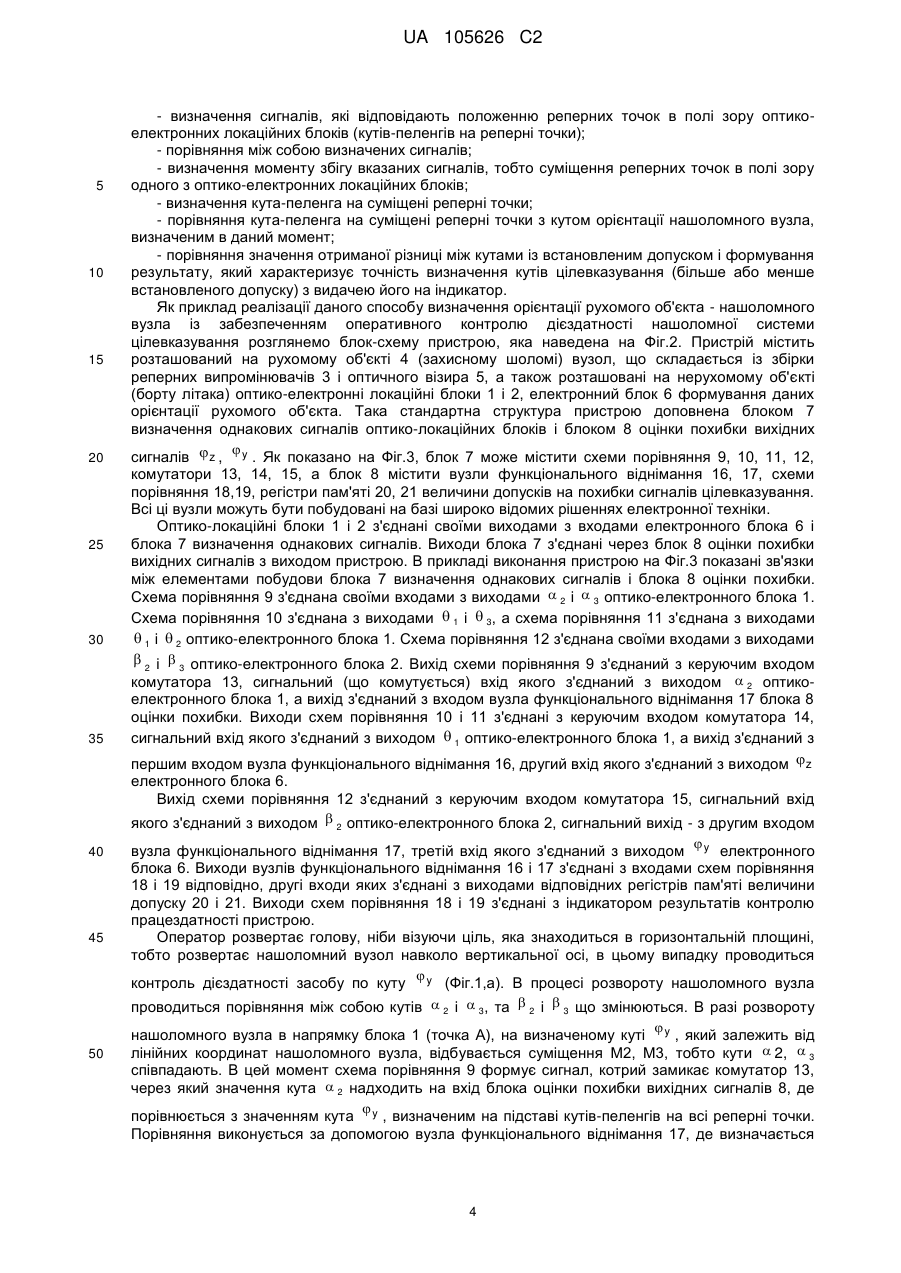
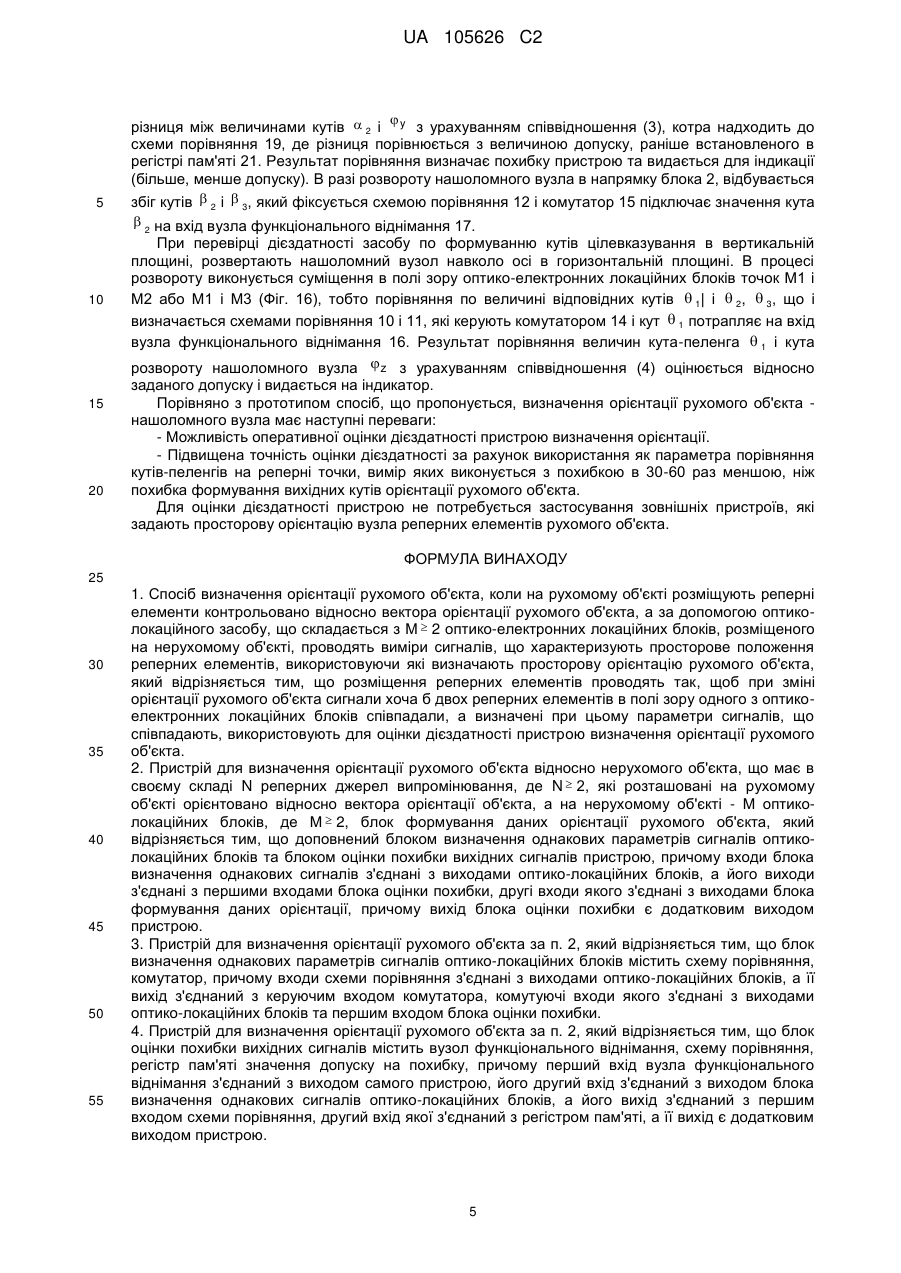
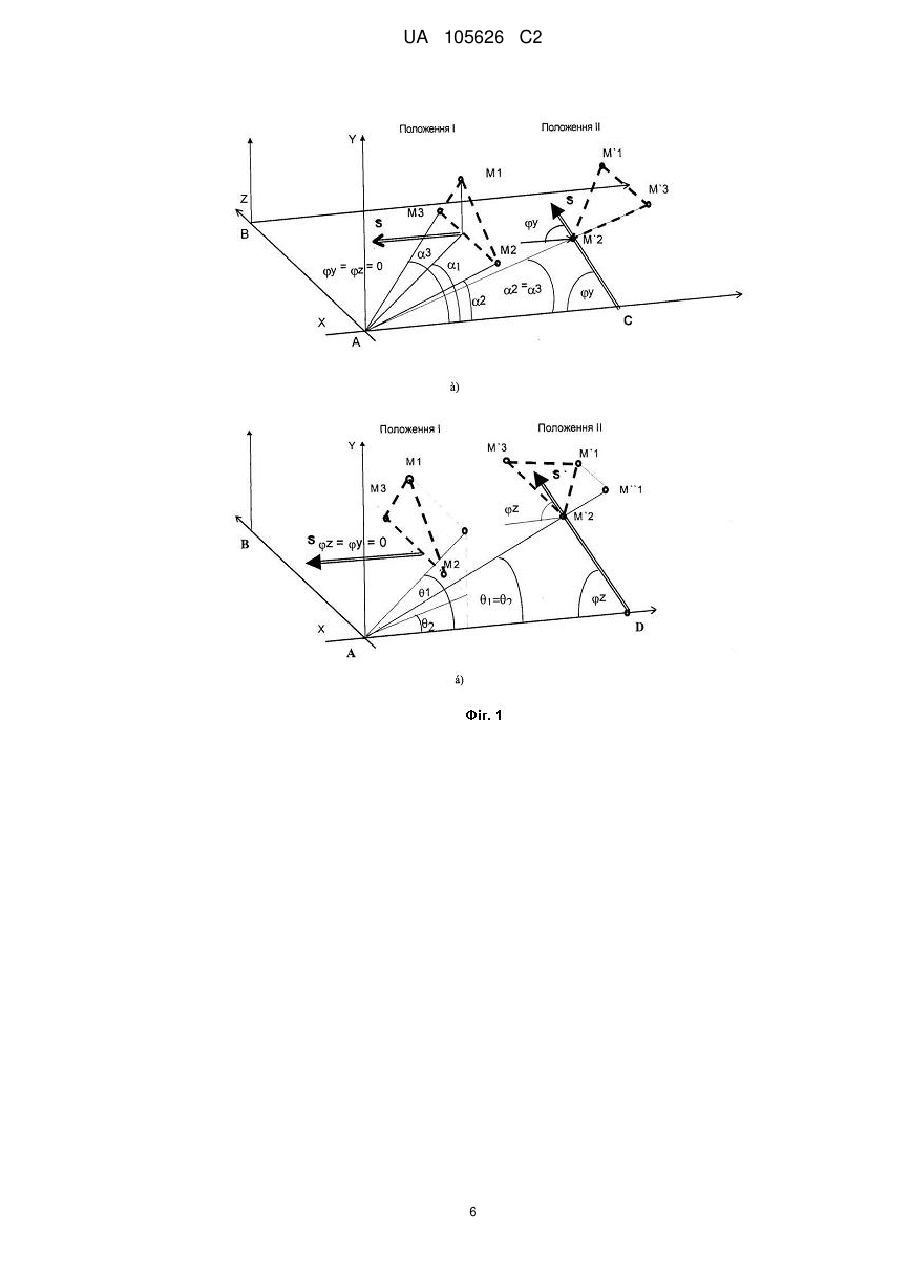
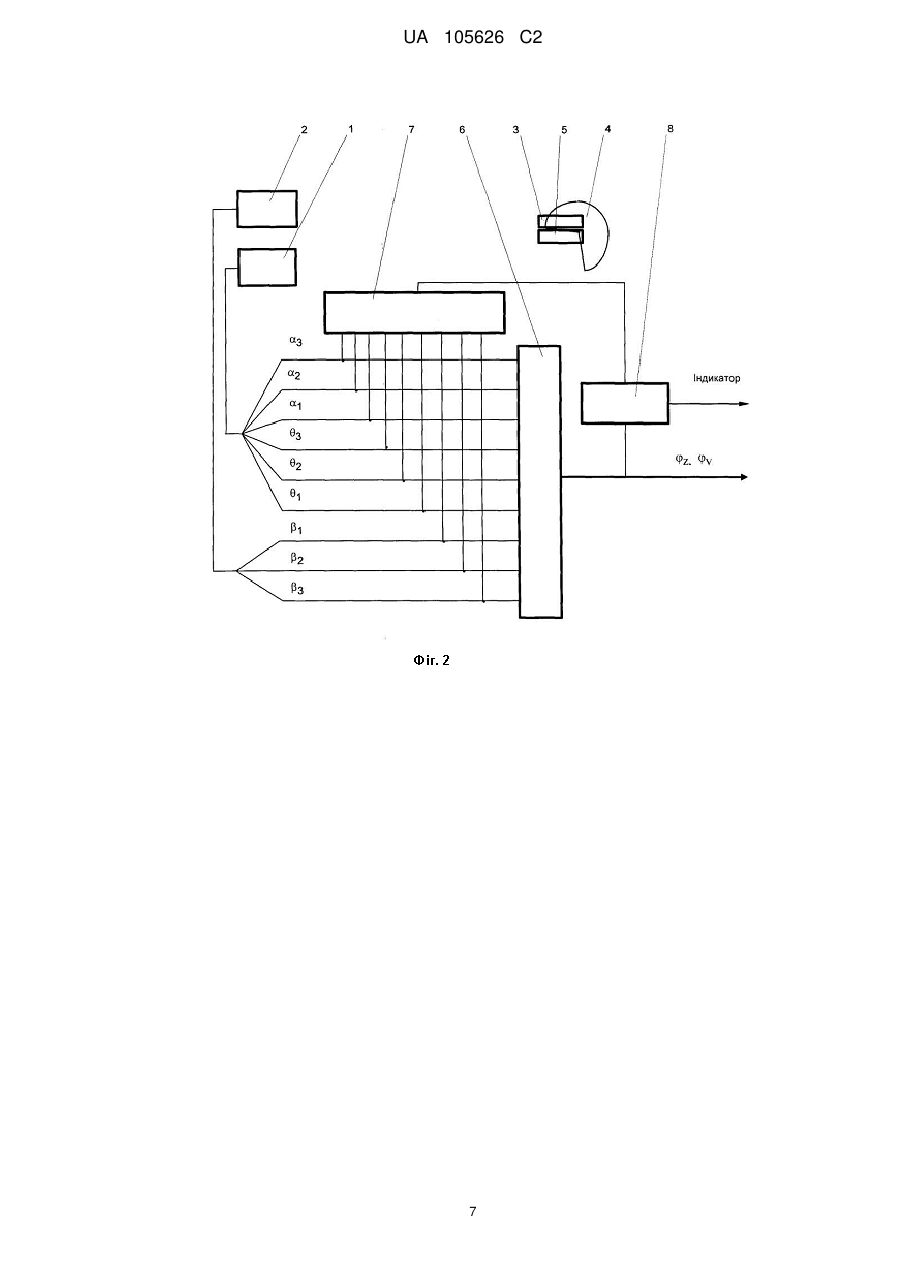
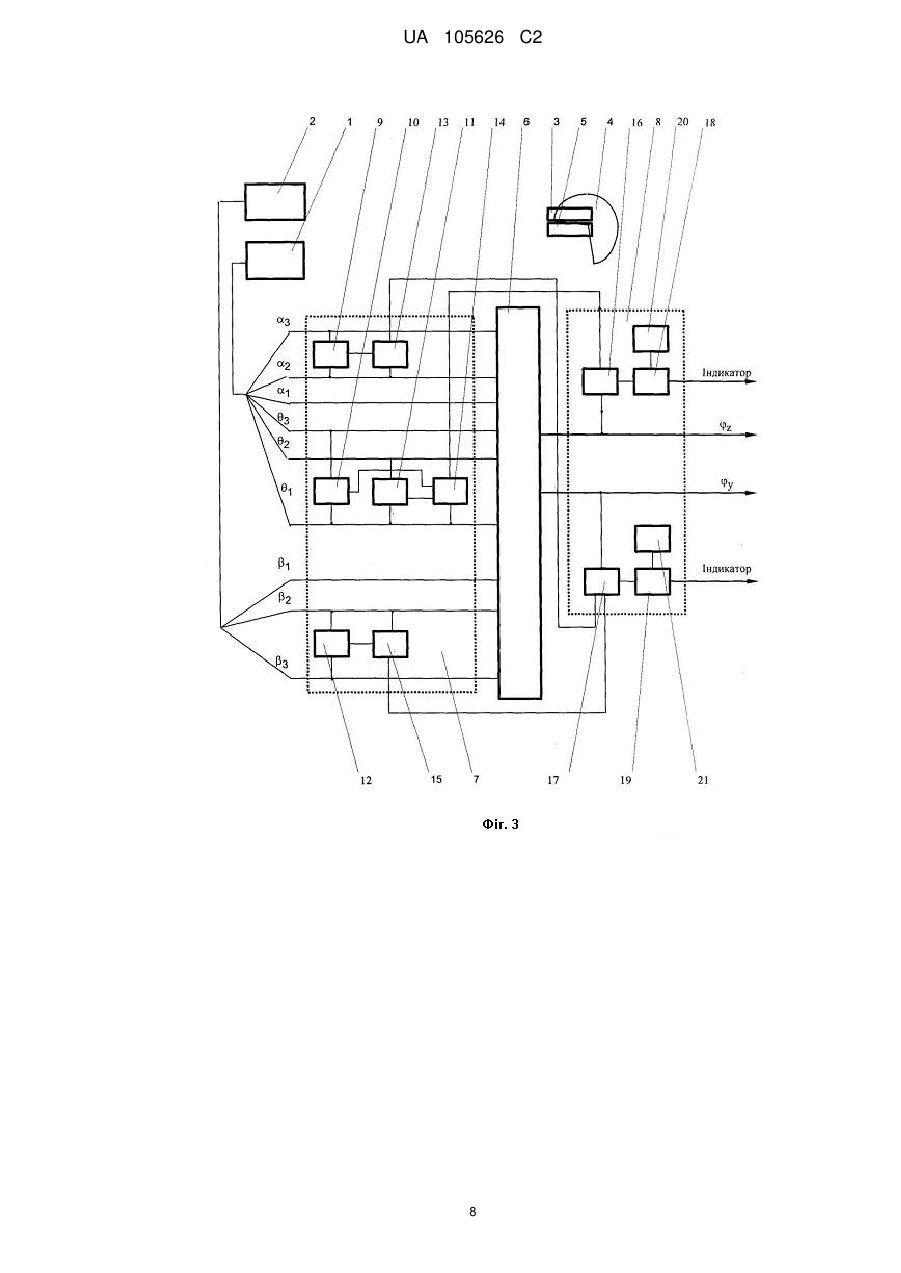
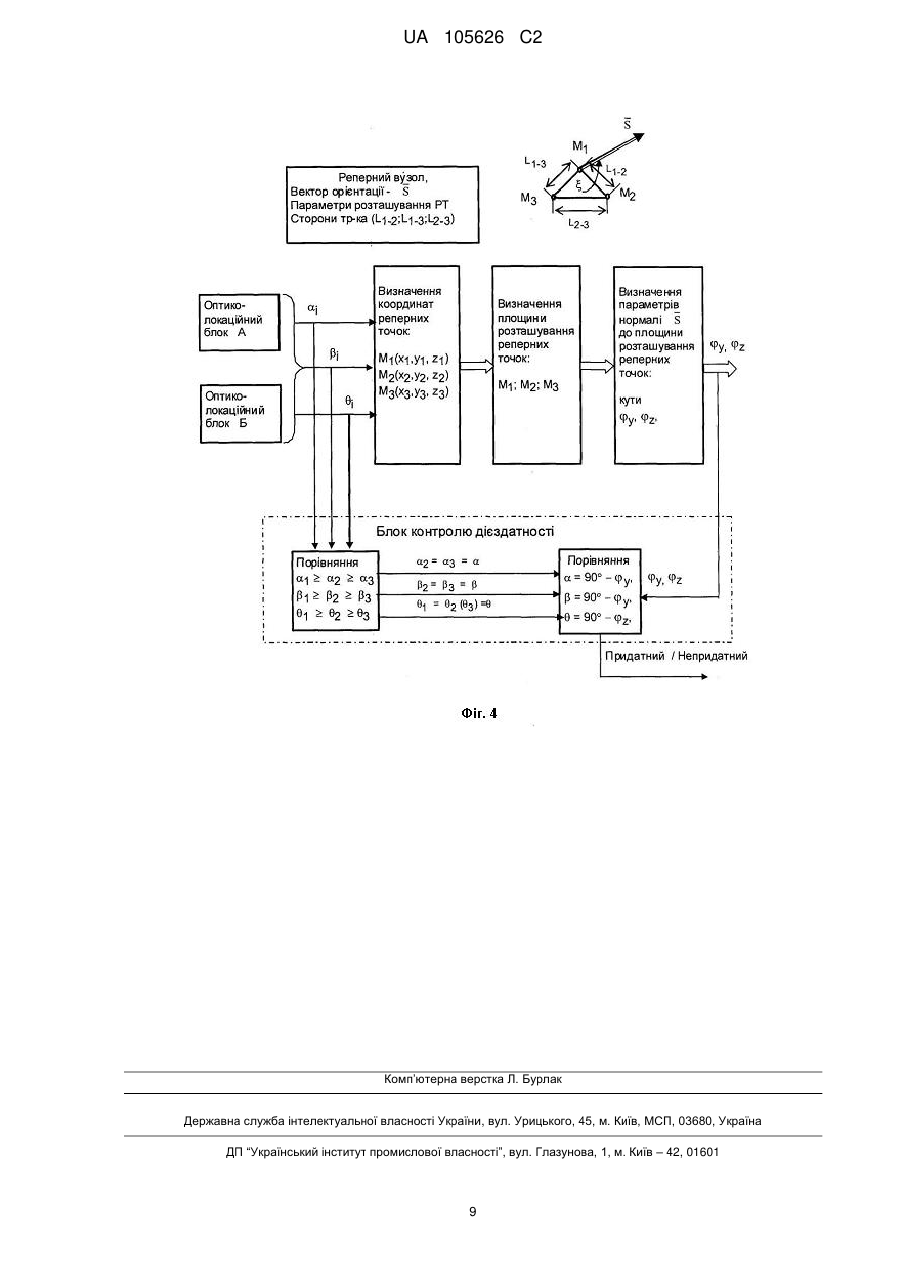
Реферат: Винахід належить до галузі спеціального оптичного приладобудування і, зокрема до систем дистанційного визначення орієнтації рухомих об'єктів з застосуванням реперних джерел випромінювання, і може бути використане при створенні систем робототехніки, а саме пристроїв визначаючих положення робочого органу маніпуляторів, а також систем управління, де використовуються дані про розвороти голови оператора, систем віртуальної реальності на основі нашоломного індикатора і т.п. Спосіб орієнтації рухомого об'єкта включає визначення кутів-пеленгів джерел випромінювання реперних елементів, які розташовані на рухомому об'єкті, з використанням оптико-електронних блоків, в якому передбачено розташування реперних елементів так, щоб при переміщенні (розворотах) рухомого об'єкта мали змогу створитися умови визначення взаємної орієнтації лінії розташування принаймні двох реперних елементів та вектора рухомого об'єкта. Використовуючи сигнали від реперних елементів, що співпали в полі зору одного з оптико-електронних блоків проводять оцінку дієздатності системи визначення орієнтації рухомого об'єкта. Пристрій дистанційного визначення координат джерел випромінювання має в своєму складі N реперних джерел випромінювання, де N 2, які розташовані на рухомому об'єкті орієнтовано відносно вектора орієнтації об'єкта, а на нерухомому об'єкті - М оптико-локацийних блоків, де М 2, блок формування даних орієнтації рухомого об'єкта, блок визначення однакових параметрів сигналів оптико-локаційних блоків та блок оцінки похибки вихідних сигналів пристрою. UA 105626 C2 (12) UA 105626 C2 UA 105626 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі спеціального оптичного приладобудування і, зокрема до систем дистанційного визначення орієнтації рухомих об'єктів, і може бути використаний при створенні систем робототехніки, а саме пристроїв, що визначають положення робочого органу маніпуляторів, а також систем управління, де використовуються дані про розвороти голови оператора, систем візуалізації тренажерів на основі нашоломного індикатора, систем віртуальної реальності і т.п. В теперішній час широко застосовуються для наведення різних керованих підсистем, перемикання органів управління без застосування рук за рахунок використання даних про розвороти голови оператора, так названі - нашоломні системи цілевказівки. Відомі системи дистанційного визначення орієнтації рухомих об'єктів, що реалізують спосіб орієнтації рухомого об'єкта, наприклад патенти України №36943; США № 3 375 375, Великобританії 1.520.154 Н4Д; Росії №2216705. Вони виконуються на основі пристроїв для визначення орієнтації рухомого об'єкта відносно нерухомого об'єкта, які містять розміщені на рухомому об'єкті N реперних джерел випромінювання, де N>2, орієнтовані відносно вектора S напрямку орієнтації об'єкта, а на нерухомому об'єкті М оптико-локаційних блоків, де М>2, та електронний блок. Пристрої містять вузол - рухомий об'єкт, що може бути розташований на поверхні шолома, або вбудований в конструкцію шолома оператора, та має в своєму складі оптичний візир та набір реперних елементів, наприклад, випромінюючих діодів (або фотодетекторів), а також розміщені на нерухомій основі оптико-електронні локаційні блоки (або блоки, що сканують пучками світла простір можливого находження рухомого об'єкта), які визначають кути-пеленги на реперні точки, та електронний блок з обчислювачем формування даних орієнтації рухомого об'єкта. Вказані пристрої реалізують наступний спосіб визначення орієнтації рухомого об'єкта (нашоломного вузла): - визначають сигнали, що відповідають положенню реперних точок в полі зору оптикоелектронних локаційних блоків; - по одержаних сигналах визначають кути-пеленги на кожну реперну точку рухомого об'єкта нашоломного вузла; - використовуючи визначені кути-пеленги, розраховують параметри орієнтації рухомого об'єкта - нашоломного вузла (наприклад, відносно базової системи координат, системи координат нерухомої основи розміщення оптико-локаційних блоків). Даний спосіб і пристрій, котрі описані в патентах України №36943, США №3375375 і в проспекті фірми Honeywell "Integrated helmet and display sighting subsystem (IHADSS)" не передбачають контроль працездатності пристрою визначення орієнтації нашоломного вузла безпосередньо в процесі його роботи по формуванню сигналів цілевказування. Для перевірки працездатності передбачаються додаткові засоби, що не входять до складу пристроїв. Так в системі IHADSS передбачено застосування додаткового коліматорного візиру, встановленого під відомими кутами в базовій системі координат. Оператор розворотом голови суміщає візирну мітку нашоломного оптичного візиру з міткою додаткового візиру. В цей момент виконується порівняння вихідного кута системи з відомими кутами розташування візирної мітки додаткового коліматорного візиру, коли формується контрольний напрямок (візирна мітка додаткового коліматорного візиру, встановленого під відомими кутами в базовій системі координат). Недоліком відомих способу і пристрою є відсутність оперативної перевірки працездатності пристрою визначення орієнтації рухомого об'єкта; Задача технічного рішення - проведення автоматизованого оперативного контролю працездатності пристрою в процесі визначення орієнтації рухомого об'єкта. Суть технічного рішення, що пропонується, полягає в розміщенні реперних елементів таким чином, щоб при зміні орієнтації (розвороту) рухомого об'єкта мали змогу створитися умови визначення взаємної орієнтації лінії розташування принаймні двох реперних елементів та вектора рухомого об'єкта використовуючи сигнали від реперних елементів, що визначаються одним з оптико-електронних блоків. Поставлена задача вирішується за рахунок того, що у відомому способі визначення орієнтації рухомого об'єкта, що полягає в розвороті нашоломного вузла і визначенні сигналів, які відповідають кутовому положенню реперних точок в полі зору оптико-електронних локаційних блоків, формуванні на основі одержаних сигналів кутів-пеленгів на реперні точки, з використанням яких і розраховують параметри орієнтації нашоломного вузла, розміщують реперні елементи так, щоб при зміні орієнтації рухомого об'єкту в полі зору одного з оптикоелектронних локаційних блоків хоча б дві реперні точки співпали що визначається в момент 1 UA 105626 C2 5 10 15 20 25 30 35 40 коли співпадають їх сигнали, тобто встановились додаткові дані щодо визначення співвідношення між їх взаємним положенням (лінії їх розташування) та вектора орієнтації нашоломного вузла (параметрами орієнтації рухомого об'єкта). При розворотах рухомого об'єкта визначають момент виконання цих співвідношень і використовують дані співвідношення для оцінки працездатності пристрою визначення орієнтації рухомого об'єкта. Пристрій для визначення орієнтації рухомого об'єкта відносно нерухомого об'єкта, що має в своєму складі N реперних джерел випромінювання, де N 2, які розташовані на рухомому об'єкті орієнтовано відносно вектора S напрямку орієнтації об'єкта, а на нерухомому об'єкті - М оптико-локаційних блоків, де М 2, блок формування даних орієнтації рухомого об'єкта доповнено блоком контролю дієздатності, який має блок визначення однакових параметрів сигналів оптико-локаційних блоків та блок оцінки похибки вихідних сигналів пристрою. Блок контролю працездатності містить блок введення та збереження даних геометричних параметрів розміщення реперних джерел випромінювання, які задані конструкцією їх розміщення на рухомому об'єкті, блок визначення геометричних параметрів розміщення реперних джерел випромінювання, блок оцінки похибки визначення геометричних параметрів. Блок оцінки похибки визначення геометричних параметрів має в своєму складі вузол віднімання, схему порівняння, регістр пам'яті. Блок визначення однакових сигналів оптико-локаційних блоків містить схему порівняння і комутатор. Як реперні елементи можливо використовувати як джерела випромінювання, так і фотодетектори, причому на нерухомому об'єкті відповідно розташовують або фотоприймальні блоки, або блоки, що сканують пучками світла. Викладена суть способу і пристрою, що пропонуються, пояснюється наступним описом і кресленнями, де зображені: Фіг. 1. - Геометрична схема вимірювання напрямку орієнтації рухомого об'єкта з використанням трьох реперних елементів (точок); Фіг.2. - Блок-схема реалізації пристрою; Фіг.3. - Блок-схема реалізації пристрою з деталізацією виконання основних блоків. Фіг.4. - Блок-схема реалізації режиму контролю з використанням співвідношень між положенням площини розміщення реперних точок та кутами напрямків на реперні точки при їх суміщенні в полі зору локаційних блоків. Пристрій, що пропонується, геометрична схема роботи котрого наведена на Фіг. 1, має в своєму складі два оптико-електронні локаційні блоки, які розташовуються попереду оператора, тобто вздовж осі OZ базової системи координат у точках А, В, а вузол реперних випромінювачів 3, виконаний у вигляді 3-х реперних точок М1, М2, М3, розташовується на лобній частині шолома (патент України №36943). Оптико-електронні локаційні блоки вимірюють кути між напрямками на проекції реперних точок на горизонтальну площину XOZ вимірювальної системи координат та віссю ОХ (кут i блока 1, точка відліку А; кут i блока 2, точка відліку В; де і - номер реперної точки) і кут між напрямками на проекції реперних точок на вертикальну площину YOX та віссю ОХ (кут i, 0j, де і - номер реперної точки). Визначення орієнтації нашоломного вузла виконується на основі виміряних з двох різних точок відліку - "триангуляційний спосіб" - сигналів пеленгів i ,i , i на окремі реперні точки, де і номер точки, коли визначаються координати реперних точок, параметри площини, в якій ___ 45 50 знаходяться реперні точки, а потім визначається орієнтація вектора S , нормального до , площини розташування реперних точок, тобто кутів Z y з урахуванням відомих геометричних співвідношень конкретної схеми вимірювання (базової відстані Б між точками відліку кутівпеленгів, І, h відстані між реперними точками і т.п.), які закладені в конструкції конкретного пристрою, тобто z,y i, i, i F , , h,... Б де F{Бz, l,h, …} - функціонал, що визначає співвідношення між кутами i ,i , i та кутами z,,y . При номінальних значеннях кутів i ,i , i та функціоналу F{Б , …} визначається номінальне Z значення орієнтації нашоломного вузла - кутів z,y 2 . UA 105626 C2 5 10 При відхиленні від номінальних значень кутів i ,i , i та параметрів функціоналу F{БZ, …} визначається значення кутів z,y з похибкою , яка в процесі роботи при існуючих операціях без перемикання пристрою в режим контролю, без застосування додаткового обладнання - не виявляється. Для забезпечення оперативної оцінки працездатності пристрою, одночасно з роботою основного алгоритму по визначенню координат вектора орієнтації рухомого об'єкта, використовуючи ті ж самі вихідні сигнали, виконується оцінка працездатності пристрою за рахунок визначення положення площини розміщення реперних точок, коли вони суміщені в полі зору оптико-локаційних блоків. Розміщення реперних точок в площині, яка зорієнтована під відомим кутом , до вектора ___ 15 20 25 30 S - напрямку орієнтації рухомого об'єкта, дозволяє використовувати наступне співвідношення між розрахованими кутами положення площини розміщення реперних точок та кутами напрямків на ці точки при їх суміщенні в полі зору оптико-локаційного блока. y 0 При розвороті нашоломного вузла від початкового положення, коли z ф2 = фу = 0, y що наведено на Фіг. 1а, "Положення І", навколо осі OY на кут змінюються кути-пеленги на різні реперні точки, і в момент суміщення в полі зору оптико-електронних блоків двох чи більше реперних точок, встановлюється пряме співвідношення між кутом-пеленгом на суміщені реперні точки ( 2 ) та кутом y (Фіг. 1а, "Положення II"). Так при суміщенні в полі зору оптико-локаційного блока 1 (точка А) реперних точок М2 і М3, як видно із трикутника АМ'2С, виконується наступна умова: 2 3 90 y (1) При розвороті нашоломного вузла навколо осі OZ на кут z - як показано на Фіг. 1,6 "Положення II", виконується суміщення в полі зору оптико-електронних блоків реперних точок М1 і М2 (М1 і М3), і, як очевидно з трикутника АМ"2Д, виконується наступна умова: 1 2 90 z (2) При виконанні однієї з вказаних умов значення рівних кутів i, i, i та кута y , ( z ), розрахованого на основі функціонала F{Б…}, використовують для перевірки відповідного , 90 y , співвідношення i i або i 90 z . Якщо один з параметрів функціонала F{Б…}, або значення кутів-пеленгів i ,i , i відхиляються від номінальних значень, то при суміщенні реперних точок в полі зору оптико-електронних локаційних блоків порушується співвідношення i, i 90 y , чи i 90 z тобто виявляється порушення працездатності пристрою визначення орієнтації рухомого об'єкта. Ступінь виконання вказаного співвідношення характеризує похибку пристрою згідно зі співвідношенням: i i 90 y ; (3) i 90 z (4). 35 Таким чином, в момент суміщення в полі зору оптико-електронних локаційних блоків двох чи більше реперних точок існує можливість додаткового визначення орієнтації рухомого об'єкта, ___ 40 45 тобто кутів y , z орієнтації вектора S , без використання функціоналу F{БZ, I, h, …}, тобто визначається орієнтація рухомого об'єкта як відомим способом, так і по сигналах пеленгів на реперні точки, які виміряні в момент їх суміщення. Визначивши кути y , z двома способами, проводять їх порівняння між собою та результати порівняння (одержану різницю) застосовують для оцінки y z дієздатності пристрою визначення кутів , . Блок-схема реалізації режиму контролю наведена на Фіг.4. Виходячи із вищенаведеного, спосіб визначення орієнтації нашоломного вузла із забезпеченням оперативного контролю дієздатності пристрою передбачає наступні операції: - розташування реперних точок в площині, нормаль до якої відомим чином зорієнтована (наприклад, є колінеарною) відносно вектора орієнтації рухомого об'єкта; 3 UA 105626 C2 5 10 15 20 25 30 35 40 45 50 - визначення сигналів, які відповідають положенню реперних точок в полі зору оптикоелектронних локаційних блоків (кутів-пеленгів на реперні точки); - порівняння між собою визначених сигналів; - визначення моменту збігу вказаних сигналів, тобто суміщення реперних точок в полі зору одного з оптико-електронних локаційних блоків; - визначення кута-пеленга на суміщені реперні точки; - порівняння кута-пеленга на суміщені реперні точки з кутом орієнтації нашоломного вузла, визначеним в даний момент; - порівняння значення отриманої різниці між кутами із встановленим допуском і формування результату, який характеризує точність визначення кутів цілевказування (більше або менше встановленого допуску) з видачею його на індикатор. Як приклад реалізації даного способу визначення орієнтації рухомого об'єкта - нашоломного вузла із забезпеченням оперативного контролю дієздатності нашоломної системи цілевказування розглянемо блок-схему пристрою, яка наведена на Фіг.2. Пристрій містить розташований на рухомому об'єкті 4 (захисному шоломі) вузол, що складається із збірки реперних випромінювачів 3 і оптичного візира 5, а також розташовані на нерухомому об'єкті (борту літака) оптико-електронні локаційні блоки 1 і 2, електронний блок 6 формування даних орієнтації рухомого об'єкта. Така стандартна структура пристрою доповнена блоком 7 визначення однакових сигналів оптико-локаційних блоків і блоком 8 оцінки похибки вихідних сигналів z , y . Як показано на Фіг.3, блок 7 може містити схеми порівняння 9, 10, 11, 12, комутатори 13, 14, 15, а блок 8 містити вузли функціонального віднімання 16, 17, схеми порівняння 18,19, регістри пам'яті 20, 21 величини допусків на похибки сигналів цілевказування. Всі ці вузли можуть бути побудовані на базі широко відомих рішеннях електронної техніки. Оптико-локаційні блоки 1 і 2 з'єднані своїми виходами з входами електронного блока 6 і блока 7 визначення однакових сигналів. Виходи блока 7 з'єднані через блок 8 оцінки похибки вихідних сигналів з виходом пристрою. В прикладі виконання пристрою на Фіг.3 показані зв'язки між елементами побудови блока 7 визначення однакових сигналів і блока 8 оцінки похибки. Схема порівняння 9 з'єднана своїми входами з виходами 2 і 3 оптико-електронного блока 1. Схема порівняння 10 з'єднана з виходами 1 і 3, а схема порівняння 11 з'єднана з виходами 1 і 2 оптико-електронного блока 1. Схема порівняння 12 з'єднана своїми входами з виходами 2 і 3 оптико-електронного блока 2. Вихід схеми порівняння 9 з'єднаний з керуючим входом комутатора 13, сигнальний (що комутується) вхід якого з'єднаний з виходом 2 оптикоелектронного блока 1, а вихід з'єднаний з входом вузла функціонального віднімання 17 блока 8 оцінки похибки. Виходи схем порівняння 10 і 11 з'єднані з керуючим входом комутатора 14, сигнальний вхід якого з'єднаний з виходом 1 оптико-електронного блока 1, а вихід з'єднаний з першим входом вузла функціонального віднімання 16, другий вхід якого з'єднаний з виходом z електронного блока 6. Вихід схеми порівняння 12 з'єднаний з керуючим входом комутатора 15, сигнальний вхід якого з'єднаний з виходом 2 оптико-електронного блока 2, сигнальний вихід - з другим входом вузла функціонального віднімання 17, третій вхід якого з'єднаний з виходом y електронного блока 6. Виходи вузлів функціонального віднімання 16 і 17 з'єднані з входами схем порівняння 18 і 19 відповідно, другі входи яких з'єднані з виходами відповідних регістрів пам'яті величини допуску 20 і 21. Виходи схем порівняння 18 і 19 з'єднані з індикатором результатів контролю працездатності пристрою. Оператор розвертає голову, ніби візуючи ціль, яка знаходиться в горизонтальній площині, тобто розвертає нашоломний вузол навколо вертикальної осі, в цьому випадку проводиться контроль дієздатності засобу по куту y (Фіг.1,а). В процесі розвороту нашоломного вузла проводиться порівняння між собою кутів 2 і 3, та 2 і 3 що змінюються. В разі розвороту нашоломного вузла в напрямку блока 1 (точка А), на визначеному куті y , який залежить від лінійних координат нашоломного вузла, відбувається суміщення М2, М3, тобто кути 2, 3 співпадають. В цей момент схема порівняння 9 формує сигнал, котрий замикає комутатор 13, через який значення кута 2 надходить на вхід блока оцінки похибки вихідних сигналів 8, де порівнюється з значенням кута y , визначеним на підставі кутів-пеленгів на всі реперні точки. Порівняння виконується за допомогою вузла функціонального віднімання 17, де визначається 4 UA 105626 C2 5 10 15 20 різниця між величинами кутів 2 і y з урахуванням співвідношення (3), котра надходить до схеми порівняння 19, де різниця порівнюється з величиною допуску, раніше встановленого в регістрі пам'яті 21. Результат порівняння визначає похибку пристрою та видається для індикації (більше, менше допуску). В разі розвороту нашоломного вузла в напрямку блока 2, відбувається збіг кутів 2 і 3, який фіксується схемою порівняння 12 і комутатор 15 підключає значення кута 2 на вхід вузла функціонального віднімання 17. При перевірці дієздатності засобу по формуванню кутів цілевказування в вертикальній площині, розвертають нашоломний вузол навколо осі в горизонтальній площині. В процесі розвороту виконується суміщення в полі зору оптико-електронних локаційних блоків точок М1 і М2 або М1 і М3 (Фіг. 16), тобто порівняння по величині відповідних кутів 1| і 2, 3, що і визначається схемами порівняння 10 і 11, які керують комутатором 14 і кут 1 потрапляє на вхід вузла функціонального віднімання 16. Результат порівняння величин кута-пеленга 1 і кута розвороту нашоломного вузла z з урахуванням співвідношення (4) оцінюється відносно заданого допуску і видається на індикатор. Порівняно з прототипом спосіб, що пропонується, визначення орієнтації рухомого об'єкта нашоломного вузла має наступні переваги: - Можливість оперативної оцінки дієздатності пристрою визначення орієнтації. - Підвищена точність оцінки дієздатності за рахунок використання як параметра порівняння кутів-пеленгів на реперні точки, вимір яких виконується з похибкою в 30-60 раз меншою, ніж похибка формування вихідних кутів орієнтації рухомого об'єкта. Для оцінки дієздатності пристрою не потребується застосування зовнішніх пристроїв, які задають просторову орієнтацію вузла реперних елементів рухомого об'єкта. ФОРМУЛА ВИНАХОДУ 25 30 35 40 45 50 55 1. Спосіб визначення орієнтації рухомого об'єкта, коли на рухомому об'єкті розміщують реперні елементи контрольовано відносно вектора орієнтації рухомого об'єкта, а за допомогою оптиколокаційного засобу, що складається з М 2 оптико-електронних локаційних блоків, розміщеного на нерухомому об'єкті, проводять виміри сигналів, що характеризують просторове положення реперних елементів, використовуючи які визначають просторову орієнтацію рухомого об'єкта, який відрізняється тим, що розміщення реперних елементів проводять так, щоб при зміні орієнтації рухомого об'єкта сигнали хоча б двох реперних елементів в полі зору одного з оптикоелектронних локаційних блоків співпадали, а визначені при цьому параметри сигналів, що співпадають, використовують для оцінки дієздатності пристрою визначення орієнтації рухомого об'єкта. 2. Пристрій для визначення орієнтації рухомого об'єкта відносно нерухомого об'єкта, що має в своєму складі N реперних джерел випромінювання, де N 2, які розташовані на рухомому об'єкті орієнтовано відносно вектора орієнтації об'єкта, а на нерухомому об'єкті - М оптиколокаційних блоків, де М 2, блок формування даних орієнтації рухомого об'єкта, який відрізняється тим, що доповнений блоком визначення однакових параметрів сигналів оптиколокаційних блоків та блоком оцінки похибки вихідних сигналів пристрою, причому входи блока визначення однакових сигналів з'єднані з виходами оптико-локаційних блоків, а його виходи з'єднані з першими входами блока оцінки похибки, другі входи якого з'єднані з виходами блока формування даних орієнтації, причому вихід блока оцінки похибки є додатковим виходом пристрою. 3. Пристрій для визначення орієнтації рухомого об'єкта за п. 2, який відрізняється тим, що блок визначення однакових параметрів сигналів оптико-локаційних блоків містить схему порівняння, комутатор, причому входи схеми порівняння з'єднані з виходами оптико-локаційних блоків, а її вихід з'єднаний з керуючим входом комутатора, комутуючі входи якого з'єднані з виходами оптико-локаційних блоків та першим входом блока оцінки похибки. 4. Пристрій для визначення орієнтації рухомого об'єкта за п. 2, який відрізняється тим, що блок оцінки похибки вихідних сигналів містить вузол функціонального віднімання, схему порівняння, регістр пам'яті значення допуску на похибку, причому перший вхід вузла функціонального віднімання з'єднаний з виходом самого пристрою, його другий вхід з'єднаний з виходом блока визначення однакових сигналів оптико-локаційних блоків, а його вихід з'єднаний з першим входом схеми порівняння, другий вхід якої з'єднаний з регістром пам'яті, а її вихід є додатковим виходом пристрою. 5 UA 105626 C2 6 UA 105626 C2 7 UA 105626 C2 8 UA 105626 C2 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05D 3/00
Мітки: спосіб, пристрій, об'єкта, рухомого, реалізації, орієнтації, визначення
Код посилання
<a href="https://ua.patents.su/11-105626-sposib-viznachennya-oriehntaci-rukhomogo-obehkta-ta-pristrijj-dlya-jjogo-realizaci.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення орієнтації рухомого об’єкта та пристрій для його реалізації</a>
Спосіб визначення орієнтації осі візира і пристрій для його реалізації
Номер патенту: 47972
Опубліковано: 15.07.2004
Автори: Черняк Сергій Іванович, Ліпунова Валентина Григорівна, Кадочніков Сергій Михайлович
МПК: F41G 3/22
Мітки: осі, спосіб, пристрій, візира, реалізації, орієнтації, визначення
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, що включає сканування простору розміщення нашоломного вузла з n випромінюючими діодами плоскими оптичними віяловими променями, визначення первинних пеленгів на кожний з n випромінюючих діодів та положення n випромінюючих діодів у просторовій площині, яка проходить через реперні точки нашоломного вузла, в яких розміщені випромінюючі діоди, який відрізняється тим, що сканують просторову площину...
Спосіб визначення орієнтації осі візира та нашоломна система цілевказування для його реалізації
Номер патенту: 47969
Опубліковано: 15.09.2003
Автори: Кадочніков Сергій Михайлович, Черняк Сергій Іванович, Ліпунова Валентина Григорівна
МПК: F41G 3/22
Мітки: візира, нашоломна, спосіб, визначення, система, орієнтації, реалізації, осі, цілевказування
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, суть якого полягає в скануванні простору, в якому знаходиться нашоломний вузол із випромінюючими діодами, плоскими віяловими оптичними променями, визначенні первинних пеленгів на кожний випромінюючий діод на момент проходження через випромінюючі діоди віялових оптичних променів, визначенні положення нашоломного вузла у просторі та визначенні орієнтації осі візира, який відрізняється тим, що...
Спосіб визначення орієнтації осі візира та нашоломна система цілевказівки для його реалізації
Номер патенту: 47969
Опубліковано: 15.07.2002
Автори: Кадочніков Сергій Михайлович, Черняк Сергій Іванович, Ліпунова Валентина Григорівна
МПК: F41G 3/22
Мітки: реалізації, нашоломна, цілевказівки, спосіб, осі, візира, визначення, орієнтації, система
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, суть якого полягає в скануванні простору, в якому знаходиться нашоломний вузол із випромінюючими діодами, плоскими віяловими оптичними променями, визначенні первинних пеленгів на кожний випромінюючий діод на момент проходження через випромінюючі діоди віялових оптичних променів, визначенні положення нашоломного вузла у просторі та визначенні орієнтації осі візира, який відрізняється тим, що...
Пристрій gps-визначення координат рухомого об’єкта
Номер патенту: 82795
Опубліковано: 12.05.2008
Автори: Бурачек Всеволод Германович, Мамонтова Людмила Степанівна, Боровий Валентин Олександрович, Надточій Олександр Володимирович
МПК: G01B 7/004
Мітки: gps-визначення, координат, пристрій, рухомого, об'єкта
Формула / Реферат:
Пристрій для GPS-визначення координат рухомого об'єкта, що містить GPS-приймальний блок, встановлений на рухомому об'єкті з блоками обробки та запису інформації, та стаціонарну диференціальну GPS-станцію, який відрізняється тим, що GPS-приймальний блок включає в себе поворотну навколо вертикальної осі горизонтальну штангу-лінійку з n GPS-антенами, яка зорієнтована своєю поздовжньою віссю за напрямком, що становить ~ 45° з осями геодезичних...
Система орієнтації рухомого об”єкта
Номер патенту: 47791
Опубліковано: 15.07.2002
Автор: Снігур Анатолій Кирилович
МПК: G01C 21/00
Мітки: рухомого, орієнтації, система, об'єкта
Формула / Реферат:
1. Система орієнтації рухомого об'єкта, що містить датчики кутової швидкості, осі чутливості яких розміщені в ортогональній системі координат, і обчислювальну машину, яка відрізняється тим, що осі чутливості датчиків збігаються з твірною конуса, при цьому вісь останнього сполучена з однією з геометричних осей прямування об'єкта.2. Система за п. 1, яка відрізняється тим, що осі чутливості датчиків розподілені рівномірно по поверхні...
Попередній патент: Пастка vegf і її терапевтичне застосування
Наступний патент: Спосіб виготовлення роторних і статорних пластин
Випадковий патент: Пристрій для монтажу і демонтажу лопаті робочого колеса поворотно-лопатевої гідротурбіни