Спосіб автоматичного контролю осадки, крену, диференту та стрілки прогину/перегину плавспоруди з бездротовою передачею даних
Номер патенту: 117729
Опубліковано: 10.07.2017
Автори: Топалов Андрій Миколайович, Кондратенко Юрій Пантелійович, Козлов Олексій Валерійович

Формула / Реферат
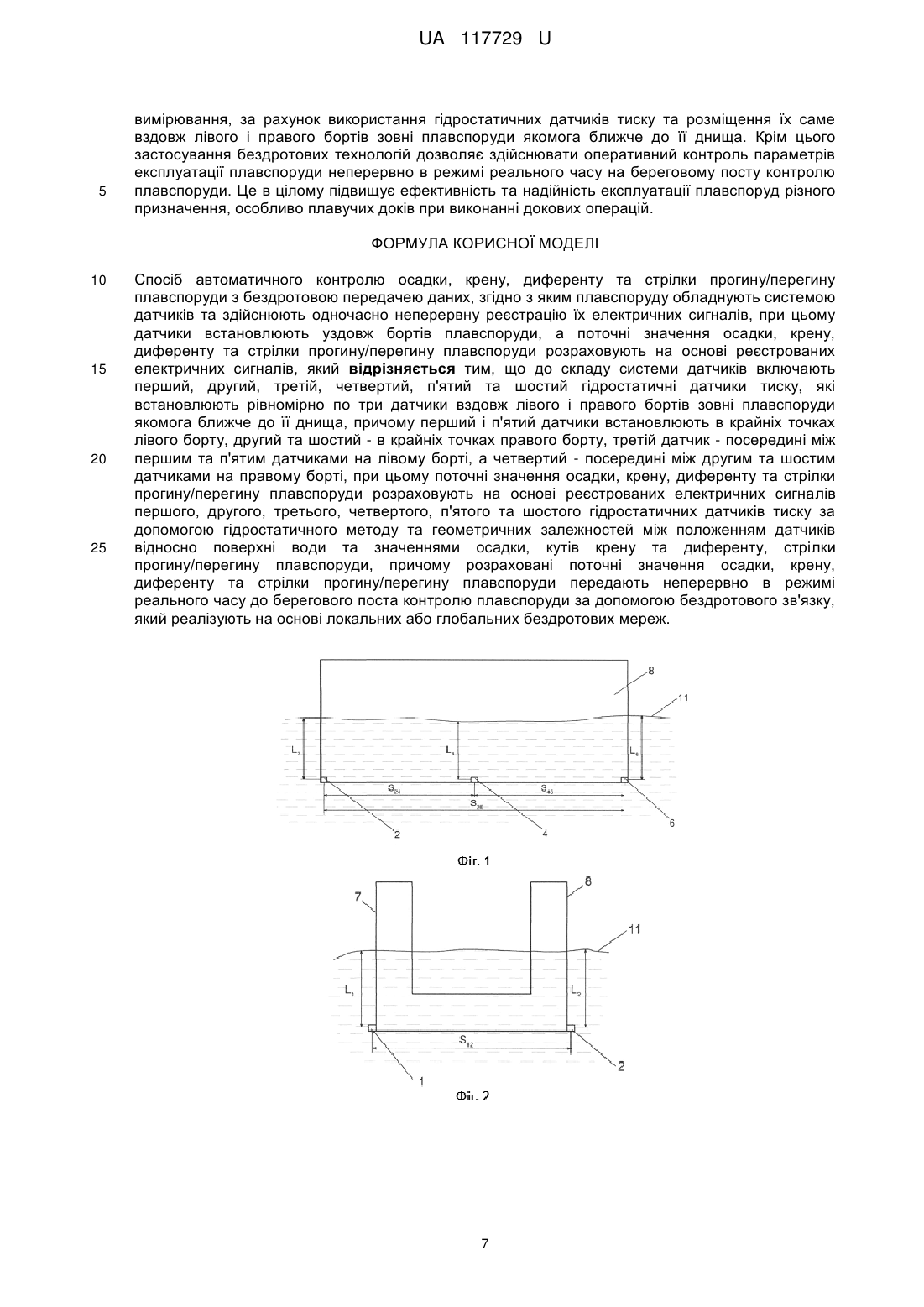
1. Спосіб автоматичного контролю осадки, крену, диференту та стрілки прогину/перегину плавспоруди з бездротовою передачею даних, згідно з яким плавспоруду обладнують системою датчиків та здійснюють одночасно неперервну реєстрацію їх електричних сигналів, при цьому датчики встановлюють уздовж бортів плавспоруди, а поточні значення осадки, крену, диференту та стрілки прогину/перегину плавспоруди розраховують на основі реєстрованих електричних сигналів, який відрізняється тим, що до складу системи датчиків включають перший, другий, третій, четвертий, п'ятий та шостий гідростатичні датчики тиску, які встановлюють рівномірно по три датчики вздовж лівого і правого бортів зовні плавспоруди якомога ближче до її днища, причому перший і п'ятий датчики встановлюють в крайніх точках лівого борту, другий та шостий - в крайніх точках правого борту, третій датчик - посередині між першим та п'ятим датчиками на лівому борті, а четвертий - посередині між другим та шостим датчиками на правому борті, при цьому поточні значення осадки, крену, диференту та стрілки прогину/перегину плавспоруди розраховують на основі реєстрованих електричних сигналів першого, другого, третього, четвертого, п'ятого та шостого гідростатичних датчиків тиску за допомогою гідростатичного методу та геометричних залежностей між положенням датчиків відносно поверхні води та значеннями осадки, кутів крену та диференту, стрілки прогину/перегину плавспоруди, причому розраховані поточні значення осадки, крену, диференту та стрілки прогину/перегину плавспоруди передають неперервно в режимі реального часу до берегового поста контролю плавспоруди за допомогою бездротового зв'язку, який реалізують на основі локальних або глобальних бездротових мереж.
Текст
Реферат: Спосіб автоматичного контролю осадки, крену, диференту та стрілки прогину/перегину плавспоруди з бездротовою передачею даних, згідно з яким плавспоруду обладнують системою датчиків та здійснюють одночасно неперервну реєстрацію їх електричних сигналів, при цьому датчики встановлюють уздовж бортів плавспоруди, а поточні значення осадки, крену, диференту та стрілки прогину/перегину плавспоруди розраховують на основі реєстрованих електричних сигналів, причому до складу системи датчиків включають перший, другий, третій, четвертий, п'ятий та шостий гідростатичні датчики тиску, які встановлюють рівномірно по три датчики вздовж лівого і правого бортів зовні плавспоруди якомога ближче до її днища, причому перший і п'ятий датчики встановлюють в крайніх точках лівого борту, другий та шостий - в крайніх точках правого борту, третій датчик - посередині між першим та п'ятим датчиками на лівому борті, а четвертий - посередині між другим та шостим датчиками на правому борті, при цьому поточні значення осадки, крену, диференту та стрілки прогину/перегину плавспоруди розраховують на основі реєстрованих електричних сигналів першого, другого, третього, четвертого, п'ятого та шостого гідростатичних датчиків тиску за допомогою гідростатичного методу та геометричних залежностей між положенням датчиків відносно поверхні води та значеннями осадки, кутів крену та диференту, стрілки прогину/перегину плавспоруди, причому розраховані поточні значення осадки, крену, диференту та стрілки прогину/перегину плавспоруди передають неперервно в режимі реального часу до берегового поста контролю плавспоруди за допомогою бездротового зв'язку, який реалізують на основі локальних або глобальних бездротових мереж. UA 117729 U (12) UA 117729 U UA 117729 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вимірювальної техніки й може бути використана при проектуванні систем автоматичного контролю осадки, крену, диференту та стрілки прогину/перегину плавспоруд з бездротовою передачею даних. Відомо про способи вимірювання та автоматичного контролю параметрів посадки плавзасобів, які базуються на розміщенні датчиків тиску, акселерометрів, датчиків кутових швидкостей, датчиків, що використовують метод імпульсної рефлектометри та ін., а також на подальшій реєстрації електричних сигналів, що надходять від датчиків, та визначенні поточної посадки плавзасобу. До прикладу серед наведених способів можна віднести спосіб, який реалізований в пристрої для вимірювання осадки, крену і диференту судна [Авторське свідоцтво на винахід № 701865, В63В 39/14, 1979], згідно з яким на кормовій, носовій і середній частинах судна розташовують прилади-вимірювачі тиску на однаковій висоті в горизонтальній площині симетрично діаметральної площині судна, які сполучені трубопроводом з прийомним отвором, що розташоване в середній частині днища судна. Всього використовують п'ять приладів-вимірювачів, по одному на кормовій і носовій частинах судна та по одному в середній частині судна відносно правого і лівого борту, п'ятий прилад-вимірювач встановлюють в центрі судна. При цьому за допомогою даних приладів-вимірювачів здійснюють вимірювання гідростатичного тиску, що передається по трубопроводу від прийомного отвору, а відлік показань з приладів-вимірювачів та їх трансляцію до центрального приладу здійснюють за допомогою систем передачі, що можуть бути реалізованими на різних фізичних принципах (електричному, пневматичному та ін.). За допомогою центрального приладу розраховують значення осадки, прогину, кутів крену та диференту судна на підставі виміряної інформації з приладів-вимірювачів та геометричних залежностей між положенням приладів-вимірювачів відносно поверхні води та значеннями осадки, прогину, кутів крену та диференту судна. Такий спосіб має наступні проблеми: низька надійність та точність вимірювання значення осадки, прогину, кутів крену і диференту судна, що пов'язано з можливістю відхилення параметрів відповідних датчиків від номінальних, зниження точності при появі похибки вимірювання через засмічення трубопроводу організмами морського середовища в процесі довготривалої технічної експлуатації; висока вартість обслуговування обладнання, що застосовується для реалізації даного способу, оскільки для забезпечення заданої точності вимірювання необхідно періодично здійснювати профілактичні роботи очищення трубопроводу, що вимагає в багатьох випадках призупинення процесу вимірювання параметрів судна; значні масо-габаритні показники вимірювального обладнання, яке застосовується для реалізації даного способу, що обумовлено наявністю прийомного отвору і складної трубопровідної системи; низька інформативність, що обумовлено неможливістю безпровідної передачі даних вимірювання значення осадки, прогину, кутів крену і диференту судна до берегового посту. Найбільш близьким до запропонованого способу є спосіб, який реалізується в пристрої контролю параметрів посадки і міцності плавспоруди [Патент України на корисну модель № 11613, МПК В63В 39/12, 2006 р.], що прийнятий як прототип. Згідно з даним способом плавспоруду обладнують як мінімум чотирма датчиками контролю осадки, крену, диференту, додатково встановлюють не менше чотирьох датчиків стрілки прогину/перегину, двох датчиків деформації корпусу та групи датчиків рівня в баластних відсіках. При цьому датчики стрілки прогину/перегину розміщують між датчиками осадки й диференту уздовж бортів плавспоруди, а датчики деформації закріплюють на обох бортах уздовж корпусу плавспоруди. Всі датчики посадки, рівня, міцності у своїй роботі використовують метод імпульсної рефлектометри та електрично з'єднані з вторинним приладом, який обладнують комутатором, імпульсним високочастотним генератором, високочастотним приймачем, обчислювальним блоком та індикатором з можливістю звукової та візуальної сигналізації. В процесі вимірювання виконують почергове включення датчиків через комутатор та на основі отриманої з датчиків інформації та відомих математичних залежностей за допомогою обчислювального блоку розраховують поточні значення рівню баласту у відсіках, кутів крену і диференту, деформації корпусу та стрілки прогину/перегину плавспоруди. Такий спосіб має наступні проблеми: обмежений діапазон вимірювання осадки, крену і диференту плавспоруди, оскільки даний спосіб дозволяє вимірювати параметри посадки плавспоруди лише при зануреному понтоні; значні масо-габаритні показники вимірювального обладнання, яке застосовується для реалізації даного способу, що обумовлено великою кількістю датчиків для вимірювання осадки, крену, диференту та стрілки прогину/перегину, які використовують метод імпульсної рефлектометри й мають однотипне електронне та конструктивне виконання; 1 UA 117729 U 5 10 15 20 25 30 35 40 45 50 низька інформативність, що обумовлено відсутністю бездротової передачі даних вимірювання рівня баласту у відсіках, кутів крену і диференту, деформації корпусу та стрілки прогину/перегину плавспоруди до берегового посту. В основу поставлено задачу удосконалення способу автоматичного контролю осадки, крену, диференту та стрілки прогину/перегину плавспоруди шляхом зменшення масо-габаритних показників обладнання, що застосовується для реалізації даного способу, і розширення діапазону вимірювання за рахунок встановлення шістьох датчиків вимірювання, які виконують у вигляді однакових гідростатичних датчиків тиску і розташовують рівномірно по три датчики вздовж лівого і правого борту зовні плавспоруди якомога ближче до її днища, здійснення неперервної реєстрації електричних сигналів цих датчиків та їх передачі за допомогою бездротового зв'язку, що в цілому дозволить ефективно здійснювати вимірювання осадки, крену, диференту і стрілки прогину/перегину для плавспоруд різного призначення. Поставлена задача вирішується тим, що при реалізації способу автоматичного контролю осадки, крену, диференту та стрілки прогину/перегину плавспоруди з бездротовою передачею даних, згідно з яким плавспоруду обладнують системою датчиків відповідних параметрів та здійснюють одночасно неперервну реєстрацію їх електричних сигналів, при цьому датчики встановлюють уздовж бортів плавспоруди, а поточні значення осадки, крену, диференту та стрілки прогину/перегину плавспоруди розраховують на основі реєстрованих електричних сигналів, згідно до пропозиції до складу системи датчиків включають перший, другий, третій, четвертий, п'ятий та шостий гідростатичні датчики тиску, які встановлюють рівномірно по три датчики вздовж лівого і правого бортів зовні плавспоруди якомога ближче до її днища, причому перший і п'ятий датчики встановлюють в крайніх точках лівого борту, другий та шостий - в крайніх точках правого борту, третій датчик - посередині між першим та п'ятим датчиками на лівому борті, а четвертий - посередині між другим та шостим датчиками на правому борті, при цьому поточні значення осадки, крену, диференту та стрілки прогину/перегину плавспоруди розраховують на основі реєстрованих електричних сигналів першого, другого, третього, четвертого, п'ятого та шостого гідростатичних датчиків тиску за допомогою гідростатичного методу та геометричних залежностей між положенням датчиків відносно поверхні води та значеннями осадки, кутів крену та диференту, стрілки прогину/перегину плавспоруди, причому розраховані поточні значення осадки, крену, диференту та стрілки прогину/перегину плавспоруди передають неперервно в режимі реального часу до берегового поста контролю плавспоруди за допомогою бездротового зв'язку, який реалізують на основі локальних або глобальних бездротових мереж. Спосіб автоматичного контролю осадки, крену, диференту та стрілки прогину/перегину плавспоруди з бездротовою передачею даних дозволяє визначати поточне значення параметрів посадки і стрілки прогину/перегину плавспоруди на основі реєстрованих електричних сигналів гідростатичних датчиків тиску за допомогою гідростатичного методу та геометричних залежностей між положенням датчиків відносно поверхні води та значеннями осадки, кутів крену та диференту, стрілки прогину/перегину плавспоруди. При цьому суттєво розширюється діапазон вимірювання та знижується масо-габаритні показники обладнання, що застосовується для реалізації даного способу. Крім цього використання бездротових технологій надає широких можливостей отримання в реальному часі на береговому посту даних вимірювання параметрів плавспоруди незалежно від місця розташування плавспоруди в акваторії. Фігури 1-6 пояснюють суть запропонованого способу автоматичного контролю осадки, крену, диференту та стрілки прогину/перегину плавспоруди з бездротовою передачею даних. На фіг. 1 представлена схема плавспоруди (вид з правого борту); на фіг. 2 - схема плавспоруди (вид спереду); на фіг. 3 - схема плавспоруди (вид зверху); на фіг. 4 - схема плавспоруди з диферентом (вид з правого боку); на фіг. 5 - схема плавспоруди з креном (вид спереду); на фіг. 6 - схема плавспоруди з диферентом та корпусним прогином (вид з правого борту). На фігурах 1-6 прийнято наступні позначення: 1, 2, 3, 4, 5, 6 - перший, другий, третій, четвертий, п'ятий та шостий гідростатичні датчики тиску, відповідно; 7 - лівий борт плавспоруди; 8 - правий борт плавспоруди; 9 - положення корпусу до прогину плавспоруди; 10 - положення корпусу після прогину плавспоруди; 11- поверхня води; S13 - відстань між першим та третім 55 S35 - відстань між третім та п'ятим гідростатичними датчиками тиску; S15 - відстань між першим та п'ятим гідростатичними датчиками тиску; S 24 відстань між другим та четвертим гідростатичними датчиками тиску; S 46 - відстань між гідростатичними датчиками тиску; 2 UA 117729 U четвертим та шостим гідростатичними датчиками тиску; S 26 - відстань між другим та шостим гідростатичними датчиками тиску; S12 - відстань між першим та другим гідростатичними датчиками тиску; S 34 - відстань між третім та четвертим гідростатичними датчиками тиску; S 56 відстань між п'ятим та шостим гідростатичними датчиками тиску; L1 , L2 , L3 , L4 , L5 , L6 5 значення рівня гідростатичного стовпа води, що визначають за допомогою першого, другого, третього, четвертого, п'ятого та шостого гідростатичних датчиків тиску відповідно; L21 різниця значень рівня гідростатичного стовпа води, виміряних за допомогою другого та першого гідростатичних датчиків тиску, що визначають згідно із залежністю L21 L2 L1 ; 10 L62 - різниця значень рівня гідростатичного стовпа води, виміряних за допомогою шостого та другого гідростатичних датчиків тиску, що визначають згідно із залежністю L62 L6 L2 ; L4T - теоретичне значення рівня гідростатичного стовпа води в точці встановлення четвертого гідростатичного датчику тиску 4 без прогину/перегину плавспоруди; H RB - значення 15 прогину зі сторони правого борту плавспоруди, що визначають згідно із залежністю H RB L4 L4T ; 20 25 62 - значення кута диференту правого борту плавспоруди, що визначають на основі різниці L62 значень рівня гідростатичного стовпа води, виміряних за допомогою шостого та другого гідростатичних датчиків тиску; 21 - значення кута крену плавспоруди, що визначають на основі різниці L21 значень рівня гідростатичного стовпа води, виміряних за допомогою другого та першого гідростатичних датчиків тиску. Для реалізації запропонованого способу автоматичного контролю осадки, крену, диференту та стрілки прогину/перегину плавспоруди з бездротовою передачею даних плавспоруду обладнують першим 1, другим 2, третім 3, четвертим 4, п'ятим 5 та шостим 6 гідростатичними датчиками тиску, які розташовують рівномірно по три датчики вздовж лівого 7 і правого 8 бортів наступним чином. Перший 1 та п'ятий 5 датчики закріплюють по краям лівого борту 7 на відстані S15 один від одного, а третій датчик 3 - посередині відносно двох попередніх датчиків на відстанях S13 і S 35 , відповідно. Аналогічно, другий 2 та шостий 6 датчики закріплюють по краям правого борту 8 на відстані S 26 один від одного, а четвертий датчик - посередині відносно двох 30 попередніх датчиків на відстанях S 24 і S 46 , відповідно (фіг. 1, 2, 3). При цьому перший 1, другий 2, третій 3, четвертий 4, п'ятий 5 та шостий 6 гідростатичні датчики тиску встановлюють в плавспоруді таким чином, щоб дотримувалися наступні геометричні співвідношення S15 S 26 ; S13 S35 S 24 S 46 ; S12 S34 S56 . 35 У випадку наявності диференту (фіг. 4), правий борт 8 плавспоруди має нахил на кут 62 відносно горизонтальної осі ОХ та вертикальної осі OZ. При цьому за допомогою шостого 6 та другого 2 гідростатичних датчиків визначають значення рівня гідростатичного стовпа L6 та L2 , а також різницю між ними L62 ( L62 L6 L2 ), на основі значення якої розраховують кут 40 диференту правого борту 62 . У випадку наявності крену (фіг. 5), плавспоруда має нахил на кут 21 відносно горизонтальної осі OY та вертикальної осі OZ. При цьому за допомогою другого 2 та першого 1 гідростатичних датчиків визначають значення рівня гідростатичного стовпа L2 та L1 , а також різницю між ними L21 ( L21 L2 L1 ), на основі значення якої розраховують кут крену плавспоруди 21 . У випадку диференту та корпусного прогину (фіг. 6), плавспоруда має 3 UA 117729 U нахил на кут 62 відносно горизонтальної осі ОХ та вертикальної осі OZ та прогин зі сторони правого борту H RB . При цьому на основі показань другого 2, четвертого 4 та шостого 6 гідростатичних датчиків тиску визначають теоретичне значення рівня гідростатичного стовпа води L4T в точці встановлення четвертого датчика 4 без прогину/перегину та значення прогину 5 10 зі сторони правого борту плавспоруди H RB ( H RB L4 L4T ). Суть запропонованого способу автоматичного контролю осадки, крену, диференту та стрілки прогину/перегину плавспоруди з бездротовою передачею даних полягає в наступному. Електричні сигнали першого 1, другого 2, третього 3, четвертого 4, п'ятого 5 та шостого 6 гідростатичних датчиків тиску вимірюють та реєструють протягом всього часу експлуатації плавспоруди. Поточне значення рівня гідростатичного стовпа води в точці встановлення /-го гідростатичного датчику тиску визначають на основі реєстрованого електричного сигналу даного датчику за допомогою гідростатичного методу, згідно із залежністю Li Pi , в g де Pi - значення гідростатичного тиску стовпа води, яке вимірюють за допомогою i-го в - густина води акваторії; g - прискорення вільного падіння, i 15 гідростатичного датчику тиску; 20 - номер відповідного гідростатичного датчику тиску, i 1, 2, 3, 4, 5, 6 . Поточне значення осадки плавспоруди D розраховують на основі реєстрованих електричних сигналів першого 1, другого 2, третього 3, четвертого 4, п'ятого 5 та шостого 6 гідростатичних датчиків тиску як середнє арифметичне значення від значень гідростатичного стовпа води L1 , L2 , L3 , L4 , L5 , та L6 , згідно із залежністю D L1 L2 L3 L4 L5 L6 P1 P2 P3 P4 P5 P6 . 6 6в g Поточне значення крену плавспоруди розраховують на основі реєстрованих електричних сигналів першого 1, другого 2, третього 3, четвертого 4, п'ятого 5 та шостого 6 гідростатичних датчиків тиску як середнє арифметичне значення від значень кутів крену 21 , 43 та 65 , згідно 25 із залежністю 21 43 65 , 3 де 21 - значення кута крену плавспоруди, що розраховують на основі різниці L21 значень рівня гідростатичного стовпа води, визначених за допомогою другого 2 та першого 1 гідростатичних датчиків тиску; 21 - значення кута крену плавспоруди, що розраховують на 30 основі різниці L43 значень рівня гідростатичного стовпа води, визначених за допомогою четвертого 4 та третього 3 гідростатичних датчиків тиску; 65 - значення кута крену плавспоруди, що розраховують на основі різниці L65 значень рівня гідростатичного стовпа води, визначених за допомогою шостого 6 та п'ятого 5 гідростатичних датчиків тиску. В свою чергу, значення кутів крену 21 , 21 та 65 розраховують на основі геометричних 35 залежностей між положенням датчиків відносно поверхні води та значеннями кутів крену плавспоруди P P L21 L L1 arcsin 2 arcsin 2 1 ; S gS S12 12 в 12 21 arcsin L43 L L3 P P3 ; arcsin 4 arcsin 4 S gS S34 34 в 34 43 arcsin L65 L L5 P P5 . arcsin 6 arcsin 6 S gS 56 S56 в 56 65 arcsin 4 UA 117729 U Таким чином, поточне значення крену плавспоруди y розраховують згідно із залежністю 5 21 43 65 3 P P P P3 P6 P5 arcsin 2 1 arcsin 4 gS gS arcsin gS в 12 в 34 в 56 . 3 Поточне значення диференту плавспоруди розраховують на основі реєстрованих електричних сигналів першого 1, другого 2, п'ятого 5 та шостого 6 гідростатичних датчиків тиску як середнє арифметичне значення від значень кутів диференту лівого борту 51 та правого борту 62 , згідно із залежністю 2 51 різниці L51 значень рівня гідростатичного стовпа води, визначених за допомогою п'ятого 5 та першого 1 гідростатичних датчиків тиску; 62 - значення кута диференту правого борту плавспоруди, що розраховують на основі різниці L62 значень рівня гідростатичного стовпа де 10 51 62 , - значення кута диференту лівого борту плавспоруди, що розраховують на основі води, визначених за допомогою шостого 6 та другого 2 гідростатичних датчиків тиску. В свою чергу, значення кутів диференту лівого борту 51 та правого борту 15 62 розраховують на основі геометричних залежностей між положенням датчиків відносно поверхні води та значеннями кутів диференту плавспоруди L51 L L1 P P arcsin 5 arcsin 5 1 ; S gS S15 15 в 15 51 arcsin L62 L L1 P P2 . arcsin 6 arcsin 6 S gS S 26 26 в 26 62 arcsin Таким чином, поточне значення диференту плавспоруди залежністю 20 51 62 2 розраховують згідно із P P P P2 arcsin 5 1 arcsin 6 gS gS в 15 в 26 . 2 Поточне значення стрілки прогину/перегину плавспоруди H (U ) H розраховують на основі реєстрованих електричних сигналів першого 1, другого 2, третього 3, четвертого 4, п'ятого 5 та шостого 6 гідростатичних датчиків тиску як середнє арифметичне значення від 25 значень стрілки прогину/перегину лівого борту H LB (U ) H LB та правого борту H RB (U ) H RB , згідно із залежністю H (U ) H H LB (U ) H LB H RB (U ) H RB . 2 В свою чергу, значення стрілки прогину/перегину лівого борту плавспоруди H LB (U ) H LB визначають згідно із залежністю H LB (U ) H LB L3 L3T , 30 де L3T - теоретичне значення рівня гідростатичного стовпа води в точці встановлення третього гідростатичного датчику тиску 3 без прогину/перегину плавспоруди, L3T L1 S13 sin 51 P 1 S13 sin 51 . в g Позитивне значення різниці теоретичного значення рівня L3T і реального значення L3 , виміряного за допомогою третього гідростатичного датчика 3, свідчить про наявність прогину 35 H LB лівого борту плавспоруди: 5 UA 117729 U L3 L3T H LB при L3 L3T 0 . Негативне значення даної різниці, у свою чергу, вказує на наявність перегину H LB лівого борту плавспоруди: L3 L3T H LB при L3 L3T 0 . 5 Отже H LB (U ) H LB L3 L1 S13 sin 51 P3 P 1 S13 sin 51 . g в g в Значення стрілки прогину/перегину правого борту плавспоруди H RB (U ) H RB визначають згідно із залежністю 10 H RB (U ) H RB L4 L4T , де L4T - теоретичне значення рівня гідростатичного стовпа води в точці встановлення четвертого гідростатичного датчику тиску 4 без прогину/перегину плавспоруди, L4T L2 S 24 sin 62 P2 S 24 sin 62 . в g Позитивне значення різниці теоретичного значення рівня L4T і реального значення L4 , виміряного за допомогою четвертого гідростатичного датчика 4, свідчить про наявність прогину 15 H RB правого борту плавспоруди: L4 L4T H RB при L4 L4T 0 . Негативне значення даної різниці, у свою чергу, вказує на наявність перегину борту плавспоруди: H RB правого L4 L4T H RB при L4 L4T 0 . 20 В свою чергу H LB (U ) H LB L4 L2 S 24 sin 62 P P4 2 S 24 sin 62 . g в g в Таким чином, поточне значення стрілки прогину/перегину плавспоруди H (U )H розраховують згідно із геометричними залежностями між положенням датчиків відносно поверхні води та значенням стрілки прогину/перегину плавспоруди: H LB (U ) H LB H RB (U ) H RB 2 P3 P1 P4 P2 . g S13 sin 51 g g S 24 sin 62 в в в g в 2 H (U ) H 25 30 35 40 Крім цього, розраховані поточні значення осадки, крену, диференту та стрілки прогину/перегину плавспоруди передають неперервно в режимі реального часу до спеціалізованого веб-сервера, що знаходиться на окремому комп'ютері берегового посту контролю плавспоруди. Веб-сервер, в свою чергу, отримує дані параметрів з плавспоруди за допомогою бездротового зв'язку (GSM, GPRS, Wi-Fi та ін.) і надає до них веб-доступ. При цьому за допомогою веб-сервера можна отримати доступ до даних з будь-якого персонального комп'ютера судноремонтного підприємства, що працює під управлінням будь-якої операційної системи (Windows, Linux, Mac OS і т.д.), а при бажанні і з будь-якого персонального комп'ютера в світі, підключеного до мережі Internet. Для цілей безпеки організовують підключення до вебсервера з зовнішніх персональних комп'ютерів в мережі Internet через надійний шифрований канал VPN. Позитивний ефект проявляється в тому, що в порівнянні із прототипом, згідно із патентом України на корисну модель № 11613, даний спосіб автоматичного контролю осадки, крену, диференту та стрілки прогину/перегину плавспоруди з бездротовою передачею даних забезпечує зниження масо-габаритних показників обладнання та розширення діапазону 6 UA 117729 U 5 вимірювання, за рахунок використання гідростатичних датчиків тиску та розміщення їх саме вздовж лівого і правого бортів зовні плавспоруди якомога ближче до її днища. Крім цього застосування бездротових технологій дозволяє здійснювати оперативний контроль параметрів експлуатації плавспоруди неперервно в режимі реального часу на береговому посту контролю плавспоруди. Це в цілому підвищує ефективність та надійність експлуатації плавспоруд різного призначення, особливо плавучих доків при виконанні докових операцій. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 25 Спосіб автоматичного контролю осадки, крену, диференту та стрілки прогину/перегину плавспоруди з бездротовою передачею даних, згідно з яким плавспоруду обладнують системою датчиків та здійснюють одночасно неперервну реєстрацію їх електричних сигналів, при цьому датчики встановлюють уздовж бортів плавспоруди, а поточні значення осадки, крену, диференту та стрілки прогину/перегину плавспоруди розраховують на основі реєстрованих електричних сигналів, який відрізняється тим, що до складу системи датчиків включають перший, другий, третій, четвертий, п'ятий та шостий гідростатичні датчики тиску, які встановлюють рівномірно по три датчики вздовж лівого і правого бортів зовні плавспоруди якомога ближче до її днища, причому перший і п'ятий датчики встановлюють в крайніх точках лівого борту, другий та шостий - в крайніх точках правого борту, третій датчик - посередині між першим та п'ятим датчиками на лівому борті, а четвертий - посередині між другим та шостим датчиками на правому борті, при цьому поточні значення осадки, крену, диференту та стрілки прогину/перегину плавспоруди розраховують на основі реєстрованих електричних сигналів першого, другого, третього, четвертого, п'ятого та шостого гідростатичних датчиків тиску за допомогою гідростатичного методу та геометричних залежностей між положенням датчиків відносно поверхні води та значеннями осадки, кутів крену та диференту, стрілки прогину/перегину плавспоруди, причому розраховані поточні значення осадки, крену, диференту та стрілки прогину/перегину плавспоруди передають неперервно в режимі реального часу до берегового поста контролю плавспоруди за допомогою бездротового зв'язку, який реалізують на основі локальних або глобальних бездротових мереж. 7 UA 117729 U 8 UA 117729 U Комп’ютерна верстка О. Рябко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G21C 17/035, G01F 23/22
Мітки: стрілки, автоматичного, плавспоруди, диференту, осадки, даних, бездротовою, крену, передачею, контролю, спосіб
Код посилання
<a href="https://ua.patents.su/11-117729-sposib-avtomatichnogo-kontrolyu-osadki-krenu-diferentu-ta-strilki-proginu-pereginu-plavsporudi-z-bezdrotovoyu-peredacheyu-danikh.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного контролю осадки, крену, диференту та стрілки прогину/перегину плавспоруди з бездротовою передачею даних</a>
Пристрій для визначення осадки, крену та диференту плавзасобу

Номер патенту: 61049
Опубліковано: 11.07.2011
Автори: Гордєєв Борис Миколайович, Зівенко Олексій Васильович, Жуков Юрій Даниїлович
МПК: B63B 39/00
Мітки: крену, диференту, осадки, пристрій, плавзасобу, визначення
Формула / Реферат:
Пристрій для визначення осадки, крену та диференту плавзасобу, що містить датчики рівня, електрично з'єднані через комутатор із вторинним приладом, що містить імпульсний високочастотний генератор, високочастотний приймач, обчислювальний блок, а вихід високочастотного приймача з'єднаний з обчислювальним блоком, до виходу якого підключений індикатор, який відрізняється тим, що датчики рівня розташовані довільно, але не в одній вертикальній...
Спосіб автоматичного контролю рівня рідини в суднових резервуарах з компенсацією впливу крену та диференту судна
Номер патенту: 106288
Опубліковано: 25.04.2016
Автори: Коробко Олексій Володимирович, Топалов Андрій Миколайович, Кондратенко Юрій Пантелійович, Герасін Олександр Сергійович, Козлов Олексій Валерійович, Кондратенко Галина Володимирівна
МПК: G01F 23/00
Мітки: суднових, рідини, компенсацією, судна, контролю, крену, автоматичного, резервуарах, спосіб, впливу, диференту, рівня
Формула / Реферат:
Спосіб автоматичного контролю рівня рідини в суднових резервуарах з компенсацією впливу крену та диференту судна, згідно з яким у робочому просторі резервуара встановлюють перший та другий вимірювачі і здійснюють одночасно неперервну реєстрацію їх електричних сигналів, причому перший та другий вимірювачі виконують у вигляді гідростатичних датчиків тиску, а значення рівня рідини в резервуарі визначають гідростатичним методом на основі...
Система автоматичного контролю рівня рідини в суднових резервуарах з компенсацією впливу крену та диференту судна
Номер патенту: 109777
Опубліковано: 12.09.2016
Автори: Кондратенко Юрій Пантелійович, Козлов Олексій Валерійович, Коробко Олексій Володимирович
МПК: G05B 19/00, B25J 19/02
Мітки: диференту, рідини, контролю, автоматичного, резервуарах, рівня, впливу, судна, система, компенсацією, суднових, крену
Формула / Реферат:
Система автоматичного контролю рівня рідини в суднових резервуарах з компенсацією впливу крену та диференту судна, що містить перший та другий вимірювачі, встановлені у робочому просторі резервуара, та арифметичний блок, перший та другий входи якого підключені до виходів першого та другого вимірювачів, які виконані у вигляді гідростатичних датчиків тиску, яка відрізняється тим, що до складу системи введено третій та четвертий вимірювачі,...
Пристрій контролю параметрів посадки і міцності плавспоруди
Номер патенту: 11613
Опубліковано: 16.01.2006
Автори: Кузьменко Олександр Вікторович, Жуков Юрій Даниїлович, Гордєєв Борис Миколайович
МПК: B63B 39/00
Мітки: міцності, параметрів, пристрій, плавспоруди, посадки, контролю
Формула / Реферат:
1. Пристрій контролю параметрів посадки і міцності плавспоруди, що містить як мінімум чотири датчики контролю осадки, крена, диферента, електрично з'єднаних через комутатор із вторинним приладом, що містить імпульсний високочастотний генератор, високочастотний приймач, обчислювальний блок, а вихід високочастотного приймача з'єднаний з обчислювальним блоком, до виходу якого підключений індикатор, який відрізняється тим, що додатково приєднані...
Пристрій для визначення осадки, крену і диференту плавзасобу
Номер патенту: 18570
Опубліковано: 25.12.1997
Автори: Половніков Валєрій Алєксандровіч, Жуков Юрій Даниїлович, Алєксандров Михайло Миколайович, Гордєєв Борис Миколайович
МПК: B63B 39/00
Мітки: крену, пристрій, диференту, осадки, визначення, плавзасобу
Формула / Реферат:
Устройство для определения осадки, крена и дифферента плавсредства, содержащее по меньшей мере четыре датчика и вторичный прибор с коммутатором и индикатором, причем каждый из датчиков подключен к коммутатору, отличающееся тем, что вторичный прибор содержит вычислительный блок им последовательно соединенные импульсный высокочастотный генератор и высокочастотный приемник, причем упомянутый генератор электрически связан с коммутатором, а выход...
Попередній патент: Розпилювач рідини
Наступний патент: Застосування коричного альдегіду як засобу для боротьби з нематодами – паразитами хребетних тварин і людини
Випадковий патент: Пристрій, спосіб та система для контролю цілісності вмістищ