Навантажувальна машина
Номер патенту: 39417
Опубліковано: 15.06.2001
Автори: Левін Олександр Михайлович, Мізін Вадим Олександрович, Лаптєв Анатолій Григорович


Формула / Реферат
1. Навантажувальна машина з ківшовим поворотним телескопічним виконавчим органом, який має корпус поворотний, сполучений з кронштейном, на якому шарнірно закріплено опору з поворотним ковшем, на гусеничному ходу, яка відрізняється тим, що вона має шарнірну підвіску опорних котків, а також пантограф у вигляді шарнірних важелів, осі яких перпендикулярні напрямку висування ковша, і з гідродомкратами телескопа, що сполучають кронштейн з корпусом поворотним відносно рами машини в вертикальній площині, а також з пристроєм повороту у вигляді тяги, шарнірно сполученої з кронштейном, з можливістю переміщення усередині короба по напрямних в площині повороту і з зазором в перпендикулярному напрямку, причому короб має шипи, на яких він може повертатися усередині корпусу поворотного за допомогою гідродомкратів повороту.
2. Навантажувальна машина за п.1, яка відрізняється тим, що вона має гідроблок повороту з двома напірними золотниками та двома дроселями, і при цьому підвідна магістраль одного напірного золотника сполучена з поршневими порожнинами гідродомкратів телескопа, а другого - зі штоковими порожнинами, відвідні магістралі сполучені між собою і через дросель зі зливною магістраллю, а лінії керування обох напірних золотників сполучені з відвідною лінією клапана з логічною функцією АБО, підвідні лінії якого сполучені з магістралями від золотника керування гідродомкратами повороту.
Текст
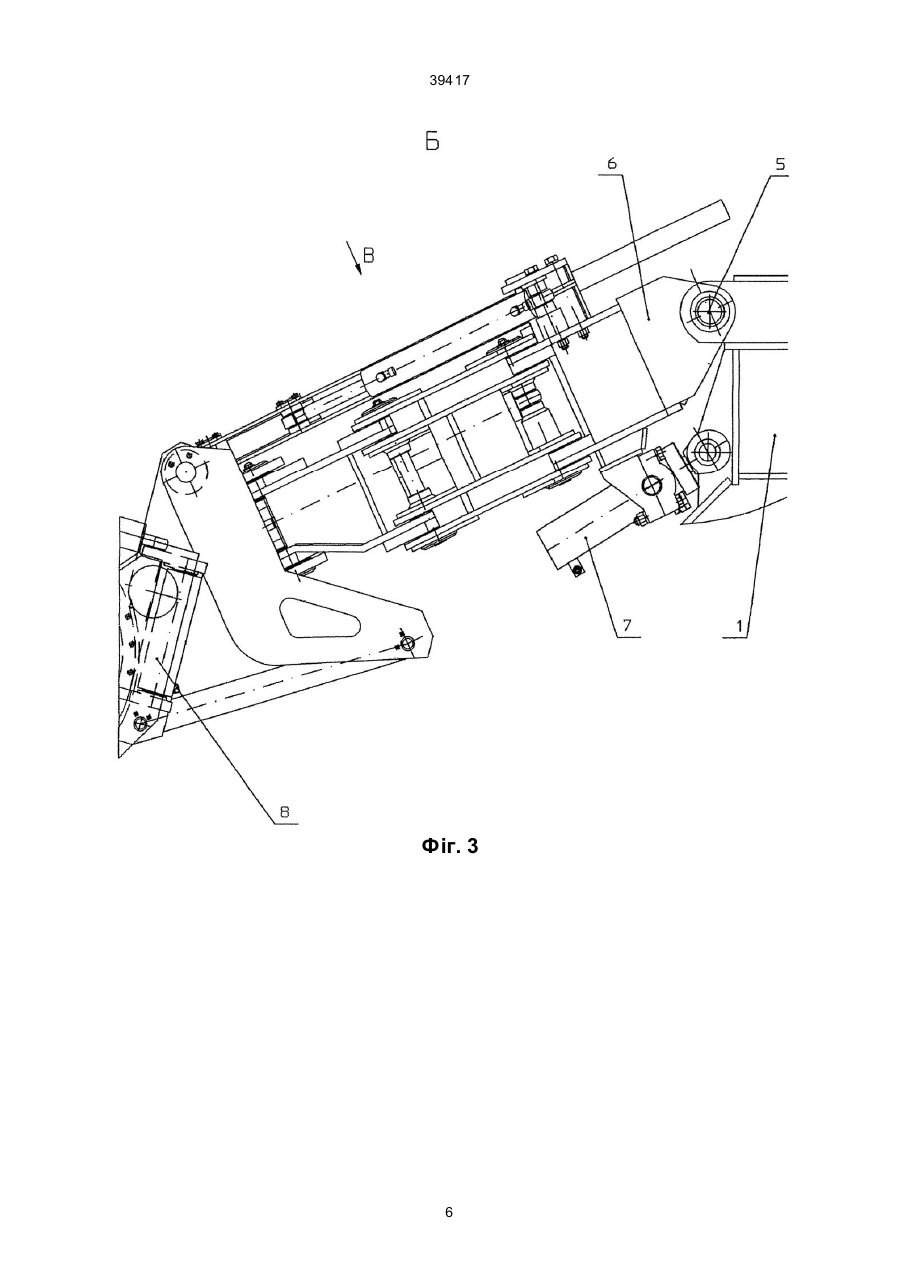
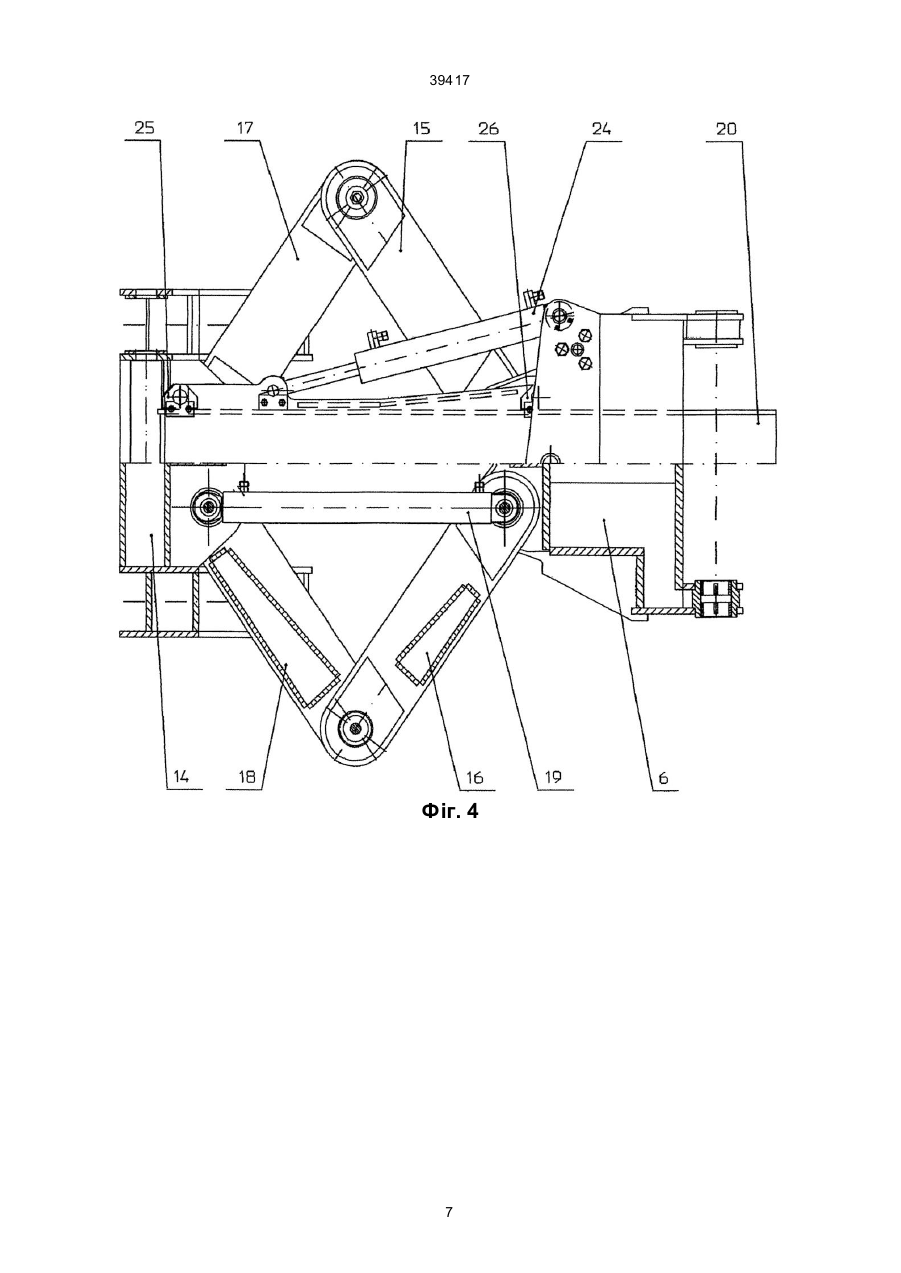
1. Навантажувальна машина з ківшовим поворотним телескопічним виконавчим органом, який має корпус поворотний, сполучений з кронштейном, на якому шарнірно закріплено опору з поворотним ковшем, на гусеничному ходу, який відрізняється тим, що вона має шарнірну підвіску опорних котків, а також пантограф у вигляді шарнірних важелів, осі яких перпендикулярні напрямку висування ковша, і з гідродомкратами телескопа, що сполучають кронштейн з корпусом поворотним 39417 ди, а поворотна платформа і увесь виконавчий орган при повороті в горизонтальній площині знаходяться над гусеницями. Жорстке кріплення опорних котків гусениць призводить до того, що коли одна гусениця машини наїжджає на перешкоду, то рама машини нахиляється. Це особливо небезпечно при розвантаженні породи у вагони, коли ківш з породою піднято увер х. Якщо при цьому виконавчий орган повернутий відносно вертикальної осі, що передбачається при розвантаженні породи в вагон, то загроза перевертання машини зростає. Машини транспортують породу з вибою виробки до місця розвантаження на відстань до 30 м зі швидкістю 0,8-1,5 м/с, виконуючи при цьому 25-40 рейсів за 1,5-2 години. Вібрація рами машини з шарнірною підвіскою опорних котків значно менша, ніж при жорсткому підвішуванні, що створює істотно більш комфортні умови роботи для машиністів. В основу винаходу поставлено задачу створення навантажувальної машини з ковшовим поворотним телескопічним виконавчим органом на гусеничному ходу з шарнірною підвіскою опорних котків, для збільшення стійкості машини і поліпшення комфортності роботи машиніста у порівнянні з прототипом. Поставлена задача вирішується таким чином. В навантажувальній машині з ковшовим телескопічним виконавчим органом, що має корпус поворотний, сполучений з кронштейном, на якому шарнірно закріплено опору з поворотним ковшем, на гусеничному ходу, корпус поворотний виконавчого органу, як Г-подібний важіль машини МПК-ЗУ, розташовується в передній частині машини між гусеницями і повертається тільки в вертикальній площині, що дозволяє використовувати шарнірну підвіску опорних котків гусениць. Корпус поворотний сполучається з кронштейном, на якому шарнірно закріплено опору з ковшем, за допомогою пантографа у вигляді важелів, осі яких перпендикулярні напрямку висування ковша. Висування ковша здійснюється гідродомкратами телескопа. Удержання у заданому положенні і поворот виконавчого органу в площині, перпендикулярній осям пантографа, виконується пристроєм повороту у вигляді тяги, яка сполучається з кронштейном і переміщується усередині короба, який має можливість повертатися гідродомкратами повороту відносно корпусу поворотного. Для того, щоб пристрій повороту сприймав тільки бокове навантаження, тяга сполучається з кронштейном віссю, перпендикулярною напрямку висування ковша, а в коробі пересувається по напрямних в площині повороту і з зазором в перпендикулярному напрямку. Короб має шипи, на яких він повертається усередині корпусу поворотного. При повороті виконавчого органу гідродомкратами повороту відстань між осями підвіски гідродомкратів телескопа змінюється. Для виконання цієї функції в гідросистему машини вводиться гідроблок повороту, що складається з двох напірних золотників та двох дроселів. Підвідна магістраль одного напірного золотника сполучена з поршневими порожнинами гідродомкратів телескопа, а другого - зі штоковими порожнинами. Відвідні магістралі сполучені між собою і через дросель зі зливом. Лінії керування обох напірних золотників спо лучені з відвідною лінією клапана з логічною функцією АБО, підвідні лінії якого сполучені з напірними магістралями від золотника керування гідродомкратами повороту. Для того , щоб напірні золотники поверталися у вихідне положення при припиненні повороту, в блоці повороту є другий дросель з суттєво меншим прохідним перерізом, ніж перший, щоб витікання робочої рідини через нього при повороті були мінімальними. Злив з другого дроселя здійснюється в лінію зливу, де розташований перший дросель. На кресленні, що пояснює суть винаходу, представлені загальний вид машини, ковшовий телескопічний поворотний виконавчий орган і принципова гідравлічна схема блока повороту. На фіг. 1 показано вид навантажувальної машини збоку; на фіг. 2 - вид А на фіг. 1; на фіг. 3 вид Б на фіг. 2; на фіг. 4 - вид В на фіг. 3 (в нижній половині розріз по осі коливання корпусу поворотного); на фіг. 5 - розріз Г-Г на фіг. 2; на фіг. 6 принципова гідравлічна схема блока повороту, на фіг. 7 - схема роботи телескопа, на фіг. 8 - схеми розвантаження та черпання. Рама машини 1 обпирається через осі 2 на поворотні важелі 3 з опорними котками 4. До рами на осі 5 кріпиться корпус поворотний 6. Коливання поворотного корпусу 6 виконується гідродомкратом 7. Ківш 8 сполучений з опорою 9 віссю 10 і повертається при розвантаженні гідродомкратом 11. Опора 9 повертається на осі 12 гідродомкратом 13 відносно кронштейна 14. Кронштейн 14 сполучається з корпусом поворотним 6 пантографом, який складається з важелів 15, 16, 17 та 18. Висування ковша виконується гідродомкратами телескопа 19. До кронштейна 14 віссю 12 кріпиться тяга 20, яка може переміщуватися з коробі 21. Короб 21 має шипи 22 та 23, на яких він повертається в корпусі поворотному 6 гідродомкратами повороту 24. В площині повороту тяга 20 утримується напрямними 25 та 26, які кріпляться до короба 21 осями. В перпендикулярному напрямку є зазор D, величина якого приймається такою, щоб при усіх можливих неточностях при виготовленні та деформації виконавчого органу при експлуатації заклинка тяги 20 в коробі 21 не відбувалася. На принциповій гідравлічній схемі гідроблока повороту (фіг. 7) показано напірні золотники 27 та 28, а також дроселі 29 та 30. Підвідна магістраль 31 напірного золотника 27 сполучена з поршневими порожнинами гідродомкратів телескопа, а підвідна магістраль 32 напірного золотника 28 - зі штоковими порожнинами. Відвідні магістралі 33 та 34 сполучені між собою і через дросель 29 зі зливом 35. Лінії керування напірних золотників 36 та 37 сполучені між собою і з лінією відвідною 38 клапана з логічною функцією АБО 39, підвідні лінії 40 та 41 якого сполучені з магістралями 42 та 43 від золотника керування гідродомкратами повороту 44. Відвідна лінія 38 клапана з логічною функцією АБО 39 сполучена з дроселем 30, злив 45 з якого виведено в спільний злій 35. На фіг. 1, 7 та 8 показано різні положення ковшового телескопічного поворотного виконавчого органу. Повний кут повороту в вертикальній площині - c визначається висотою вагона (фіг. 1); кут повороту ковша відносно опори - m визначається з умови забезпечення гарантованого просипан 2 39417 ня породи з ковша при розвантаженні (фіг. 8); кут черпання b (фіг. 8); максимальний кут повороту виконавчого органу в горизонтальній площині j (фіг. 7) визначається з умови стійкості машини при розвантаженні. Максимальне висування ковша відбувається при куті повороту j=0. При повороті виконавчого органу величина висування трохи знижується (фіг. 7). Як видно на фіг. 7, при повороті виконавчого органу гідродомкратами повороту відстань між осями кріплення гідродомкратів телескопа буває різною, і для нормальної роботи потрібен гідроблок повороту. 3 Фіг. 1 39417 4 Фіг. 2 39417 5 39417 Фіг. 3 6 39417 Фіг. 4 7 39417 Фіг. 5 8 39417 Фіг. 6 9 39417 Фіг. 7 10 39417 Фіг. 8 11 39417 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 12
ДивитисяДодаткова інформація
Автори англійськоюLevin Oleksandr Mykhailovych, Mizin Vadym Oleksandrovych, Laptiev Anatolii Hryhorovych
Автори російськоюЛевин Александр Михайлович, Мизин Вадим Александрович, Лаптев Анатолий Григорьевич
МПК / Мітки
МПК: E02F 3/345, E21D 9/12
Мітки: машина, навантажувальна
Код посилання
<a href="https://ua.patents.su/12-39417-navantazhuvalna-mashina.html" target="_blank" rel="follow" title="База патентів України">Навантажувальна машина</a>
Навантажувальна машина

Номер патенту: 655
Опубліковано: 16.10.2000
Автори: Скудар Георгій Маркович, Лаптєв Анатолій Григорович, Полунін Сергій Андрійович, Дємченко Михайло Вікторович, Мізін Вадим Олександрович, Косарєв Василь Васильович, Баранов Олег Миколайович
МПК: E21F 13/00
Мітки: машина, навантажувальна
Формула / Реферат:
1. Навантажувальна машина, що включає гусеничну ходову частину, на рамі якої за допомогою гідродомкратів підйому і поперечної горизонтальної осі, розташованої над ходовою частиною і в контурі останньої, закріплено корпус з живильником і кінцевою частиною конвеєра, прикріпленою за допомогою шарніра до приймальної секції конвеєра, яка відрізняється тим, що вісь кріплення корпусу до рами розташована позаду осі ведучого колеса ходової частини, а...
Навантажувальна машина

Номер патенту: 10202
Опубліковано: 12.11.1999
Автори: Лаптєв Анатолій Григорович, Юміна Володимир Григорович, Криворотько Олег Дмитрович, Рязанов Валентин Іванович, Барановський Михайло Самійлович
МПК: E21B 7/02, E21B 15/00, E21B 19/00
Мітки: навантажувальна, машина
Формула / Реферат:
Погрузочная машина, включающая ходовую тележку с электро- и гидрооборудованием и погрузочный орган, состоящий из опоры с шарнирно установленным в ней с помощью оси ковшом, гидроцилиндра черпания и рукояти, образующих с рамой ходовой тележки четырехзвенный механизм подъема ковша, гидроцилиндров боковой разгрузки и подъема ковша, отличающаяся тем, что рукоять погрузочного органа выполнена в виде пространственного Г-образного рычага, прямой угол...
Роторна екскаваційно-навантажувальна машина дмв
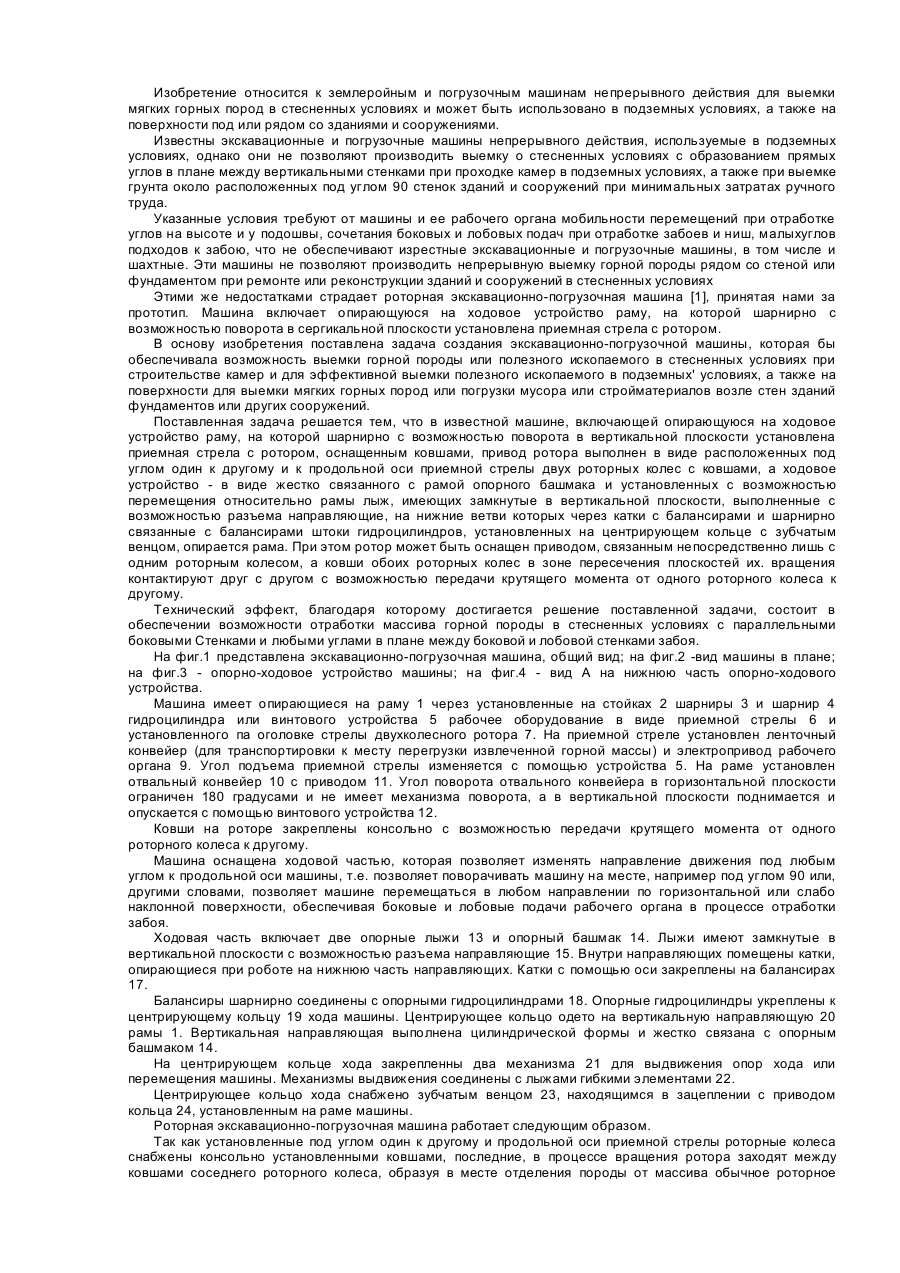
Номер патенту: 21062
Опубліковано: 04.11.1997
Автори: Єндржієвський Віктор Якович, Литвинов Володимир Георгійович, Корбут Всеволод Андрійович, Єфременко Володимир Михайлович
МПК: E02F 3/18, E21D 13/00
Мітки: дмв, роторна, машина, екскаваційно-навантажувальна
Формула / Реферат:
1. Роторная экскавационно-погрузочая машина, включает опирающуюся на ходовое устройство раму, на которой шарнирно с возможностью поворота в вертикальной плоскости установлена приемная стрела с ротором, оснащенным ковшами, приводом, отличающаяся тем, что ротор выполнен в виде расположенных под углом один к другому и к продольной оси приемной стрелы двух роторных колес с ковшами, а ходовое устройство- в виде жестко связанного с рамой опорного...
Система керування стрілоподібним виконавчим органом
Номер патенту: 37500
Опубліковано: 15.05.2001
Автори: Колсно Анатолій Прокопович, Трубчанін Володимир Вікторович, Данилов Володимир Миколайович, Антипов Віктор Тимофійович, Трубчанін Віктор Іванович
МПК: E21C 27/24
Мітки: органом, виконавчим, керування, система, стрілоподібним
Формула / Реферат:
Система керування стрілоподібним виконавчим органом прохідницького комбайна, що містить гідроциліндри телескопа, повороту і підйому-опускання виконавчого органа, закріпленого на корпусі, напірні та зливні магістралі, помпи, гідроблок керування гідроциліндрами телескопа, гідроблок керування гідроциліндрами повороту і підйому-опускання, силовий гідроблок з розподільниками для забезпечення роботи гідроциліндрів телескопа, повороту і...
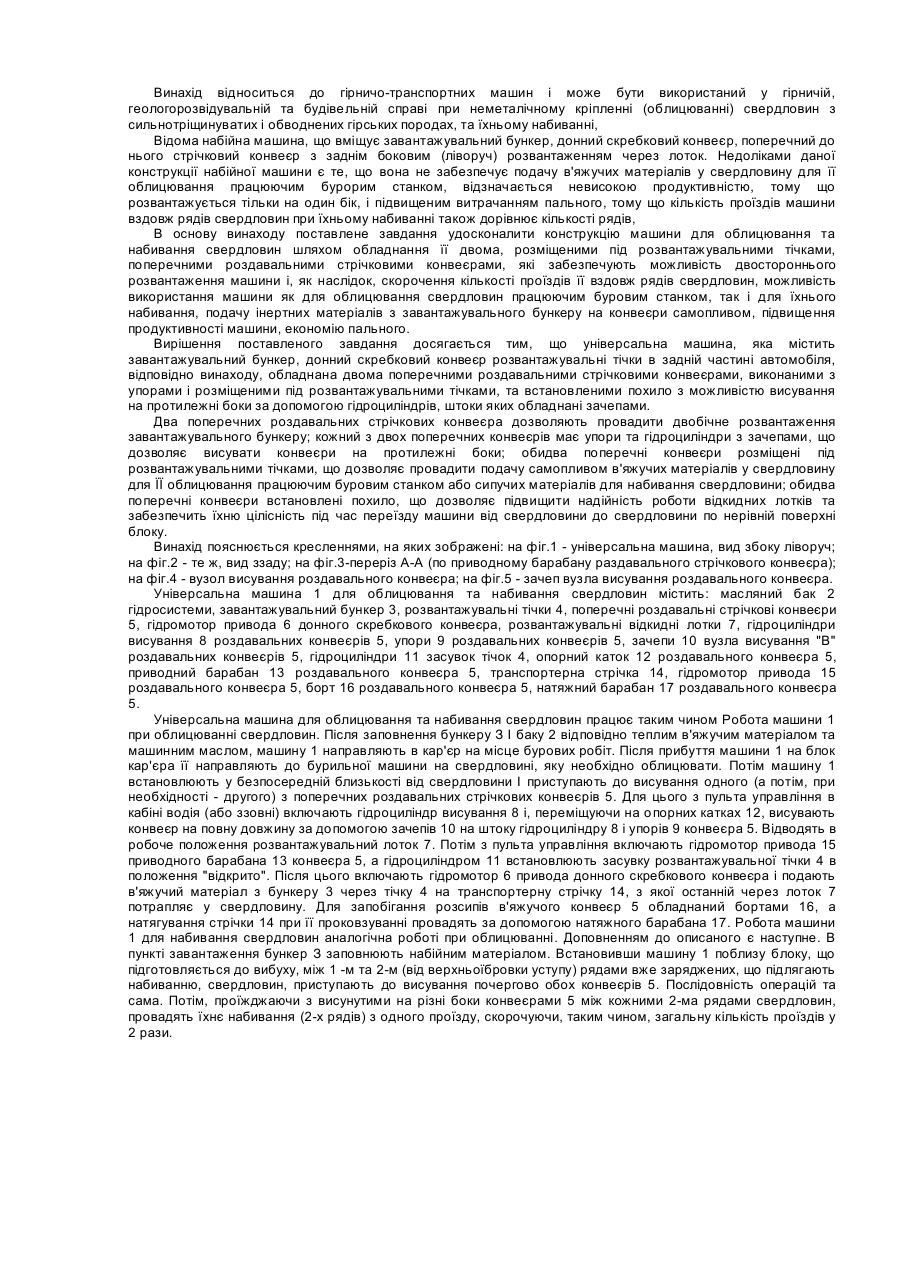
Універсальна машина для облицювання та набивання свердловин
Номер патенту: 19617
Опубліковано: 25.12.1997
Автори: Сиротенко Валерій Дмитрович, Биков Євген Костянтинович, Черняєв Микола Іванович, Кочерга Василь Макарович, Переяславський Леонід Григорович
МПК: F42D 3/00, E01C 19/00
Мітки: універсальна, свердловин, машина, облицювання, набивання
Формула / Реферат:
Універсальна машина для облицювання та набивання свердловин, що вміщує на базі автомобіля завантажувальний бункер, донний скребковий конвеєр і розвантажувальні тічки в задній частині автомобіля, яка відрізняється тим, що вона обладнана двома поперечними роздавальними стрічковими конвеєрами, виконаними з упорами і розміщеними під розвантажувальними тічками, та встановленими похило з можливістю висування на протилежні боки за допомогою...
Попередній патент: Система автоматизованого керування виробництвом м’ясокісткового борошна
Наступний патент: Спосіб лікування виразкової хвороби, асоційованої з helicobacter pylori
Випадковий патент: Підводний планер з кільцевим крилом