Спосіб та система для визначення кута повороту
Формула / Реферат
1. Спосіб визначення кута керування транспортним засобом, який включає такі етапи:
визначення швидкості рискання транспортного засобу;
визначення швидкості пересування транспортного засобу;
визначення гідравлічного потоку у блоці гідравлічного керування, підключеному паралельно зі схемою ручного гідравлічного керування транспортним засобом; та
обробку даних швидкості рискання, швидкості пересування та гідравлічного потоку для визначення кута повороту транспортного засобу.
2. Спосіб за п. 1, який відрізняється тим, що етап обробки включає використання даних швидкості рискання та швидкості пересування для одержання абсолютної оцінки кута повороту.
3. Спосіб за п. 1 або п. 2, який відрізняється тим, що етап обробки включає використання даних гідравлічного потоку для одержання відносної оцінки кута повороту.
4. Спосіб за будь-яким з попередніх пп., який відрізняється тим, що також включає етап одержання початкової оцінки кута повороту з використанням визначеної швидкості рискання та швидкості пересування транспортного засобу.
5. Спосіб визначення кута повороту транспортного засобу для застосування в автоматизованій системі кермового керування, який включає такі етапи:
увімкнення автоматизованої системи кермового керування;
виконання первісної оцінки кута повороту, включаючи:
визначення швидкості рискання транспортного засобу;
визначення швидкості пересування транспортного засобу; та
обробку даних швидкості рискання та швидкості пересування транспортного засобу для одержання первісної абсолютної оцінки кута повороту;
після чого багаторазово здійснюють:
визначення швидкості рискання транспортного засобу;
визначення швидкості пересування транспортного засобу;
визначення гідравлічного потоку у блоці гідравлічного керування, підключеному паралельно зі схемою ручного гідравлічного керування транспортним засобом;
обробку даних швидкості рискання та швидкості пересування для уточнення абсолютної оцінки кута повороту;
обробку даних швидкості гідравлічного потоку для одержання відносної оцінки кута повороту з часу увімкнення автоматизованої системи кермового керування; та
визначення кута повороту транспортного засобу з використанням абсолютної та відносної оцінок.
6. Спосіб за будь-яким з попередніх пп., який відрізняється тим, що також включає етап визначення місця розташування транспортного засобу відносно певної зони.
7. Спосіб за п. 6, який відрізняється тим, що також включає етап відстеження місця розташування транспортного засобу відносно заданого маршруту.
8. Спосіб за п. 7, який відрізняється тим, що також включає етап випускання контрольних сигналів, які стосуються кута повороту, з метою утримання транспортного засобу на заданому маршруті.
9. Спосіб за будь-яким з попередніх пп., який відрізняється тим, що етап визначення швидкості рискання транспортного засобу включає вимірювання вихідного показника гіроскопічного датчика.
10. Спосіб за будь-яким з попередніх пп., який відрізняється тим, що етап визначення швидкості пересування транспортного засобу в оптимальному варіанті включає розрахунок швидкості пересування транспортного засобу на основі даних глобальної навігаційної супутникової системи (GNSS).
11. Спосіб за будь-яким з попередніх пп., який відрізняється тим, що етап визначення гідравлічного потоку у блоці гідравлічного керування включає застосування датчика потоку у гідравлічній лінії між клапанним блоком блока гідравлічного керування, підключеного паралельно зі схемою ручного гідравлічного керування транспортним засобом, та гідравлічною схемою керування.
12. Система кермового керування, яка визначає кут повороту транспортного засобу, причому система кермового керування включає:
блок визначення швидкості рискання;
блок визначення швидкості пересування;
систему кермового керування; та
блок гідравлічного керування, підключений паралельно зі схемою ручного гідравлічного керування транспортним засобом, причому блок гідравлічного керування включає:
блок гідравлічного клапана у сполученні з системою кермового керування для увімкнення гідравлічного потоку у гідравлічних лініях, сполучених з гідравлічною схемою керування; та
датчик потоку у принаймні одній з гідравлічних ліній між клапанним блоком та гідравлічною схемою керування;
причому система кермового керування обробляє дані від блока визначення швидкості рискання, блока визначення швидкості пересування та датчика потоку блока гідравлічного керування для визначення кута повороту.
13. Система за п. 12, яка відрізняється тим, що система кермового керування визначає кут повороту шляхом обробки даних швидкості рискання від блока визначення швидкості рискання, швидкості пересування від блока визначення швидкості пересування для одержання абсолютної оцінки кута повороту і обробки виміряної швидкості потоку від датчика потоку блока гідравлічного керування для одержання відносної оцінки кута повороту.
14. Система за пп. 12 або 13, яка відрізняється тим, що блок визначення швидкості рискання включає гіроскопічний датчик.
15. Система за будь-яким з пп. з 12 по 14, яка відрізняється тим, що блок визначення швидкості пересування використовує дані глобальної навігаційної супутникової системи (GNSS) від датчика глобальної навігаційної супутникової системи (GNSS).
16. Система за будь-яким з пп. з 12 по 15, яка відрізняється тим, що також включає блок кермового керування, який застосовують вибірково.
17. Система за п. 16, яка відрізняється тим, що блок кермового керування застосовують для утримання транспортного засобу на заданому маршруті.
18. Система за п. 16 або 17, яка відрізняється тим, що блок кермового керування приводить у дію гідравлічний потік у гідравлічних лініях, сполучених зі схемою ручного гідравлічного керування транспортним засобом.
19. Система за п. 18, яка відрізняється тим, що потік у гідравлічних лініях між клапанним блоком та гідравлічною схемою керування існує лише у разі, якщо задіяно блок кермового керування.
20. Система за будь-яким з пп. з 16 по 19, яка відрізняється тим, що блок кермового керування використовує існуючий гідравлічний насос та резервуар схеми ручного гідравлічного керування транспортним засобом, якщо задіяно блок кермового керування.
21. Автоматизований керувальний комплект для пристосування до транспортного засобу, причому комплект включає:
блок визначення швидкості рискання; блок визначення швидкості пересування; систему кермового керування;
блок гідравлічного клапана у сполученні з системою кермового керування для увімкнення гідравлічного потоку у гідравлічних лініях, які сполучаються зі схемою ручного гідравлічного керування транспортним засобом; та
датчик потоку у гідравлічній лінії між клапанним блоком та гідравлічною схемою керування для вимірювання гідравлічного потоку у гідравлічній лінії;
причому система кермового керування:
отримує й обробляє дані від блока визначення швидкості рискання, блока визначення швидкості пересування та датчика потоку для визначення кута повороту; і
обробляє визначені дані кута повороту для визначення вихідного показника кермового керування, який має приводитися в дію блоком гідравлічного клапана.
22. Автоматизований керувальний комплект за п. 21, який відрізняється тим, що система кермового керування обробляє дані швидкості рискання від блока визначення швидкості рискання та швидкості пересування від блока визначення швидкості пересування для одержання або уточнення абсолютної оцінки кута повороту, обробляє виміряну швидкість потоку від датчика потоку для одержання відносної оцінки кута повороту і обробляє абсолютні та відносні оцінки для визначення кута повороту транспортного засобу.
Текст
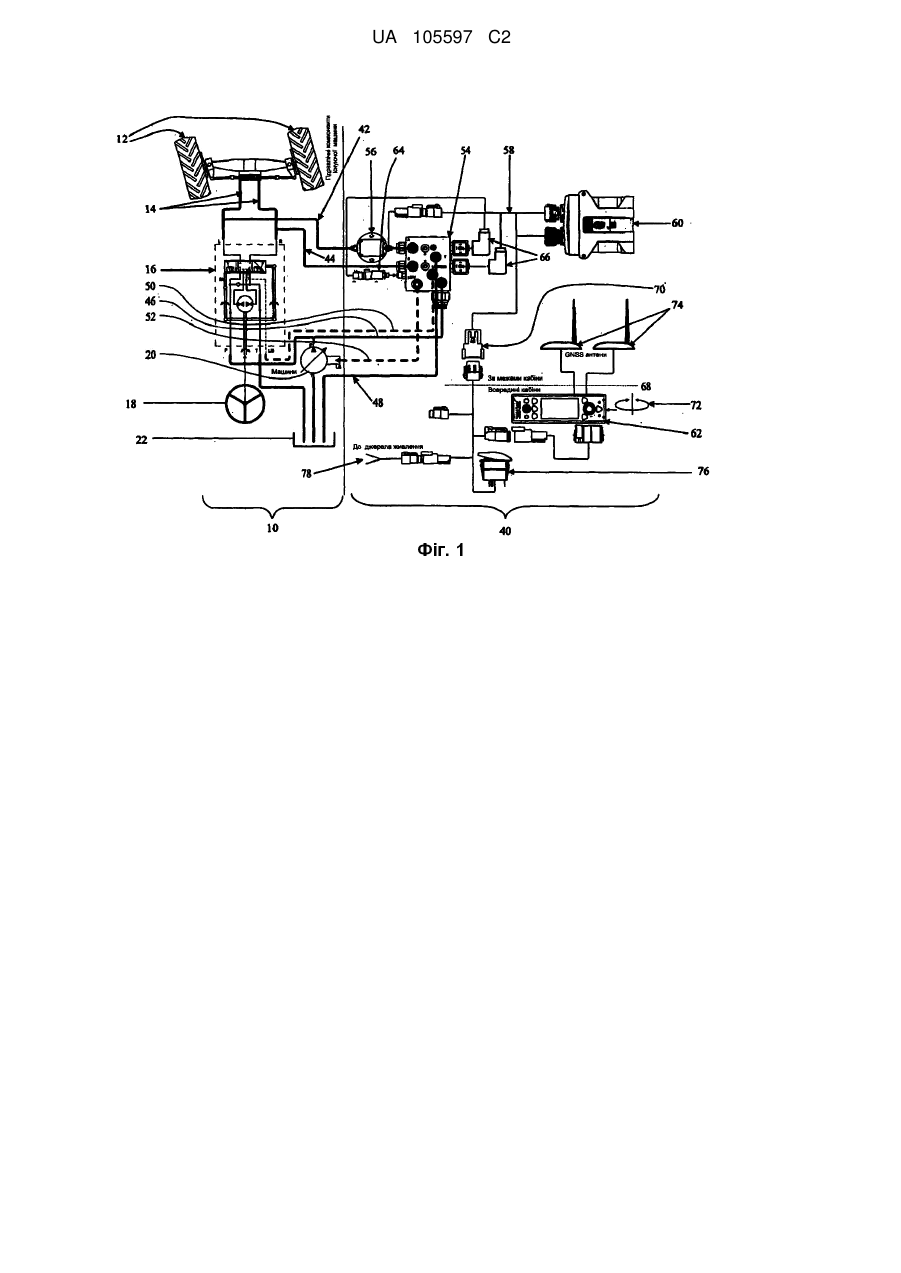
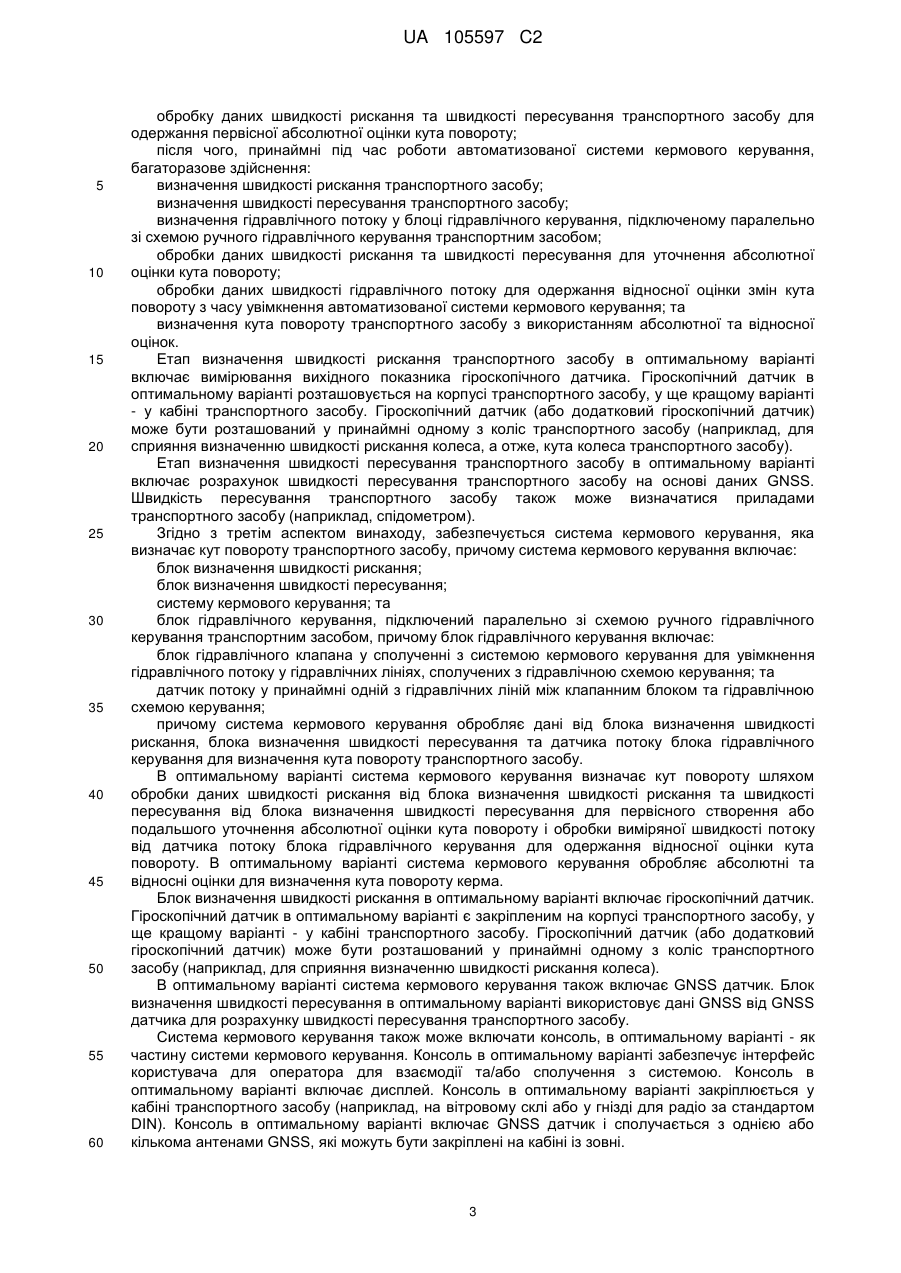
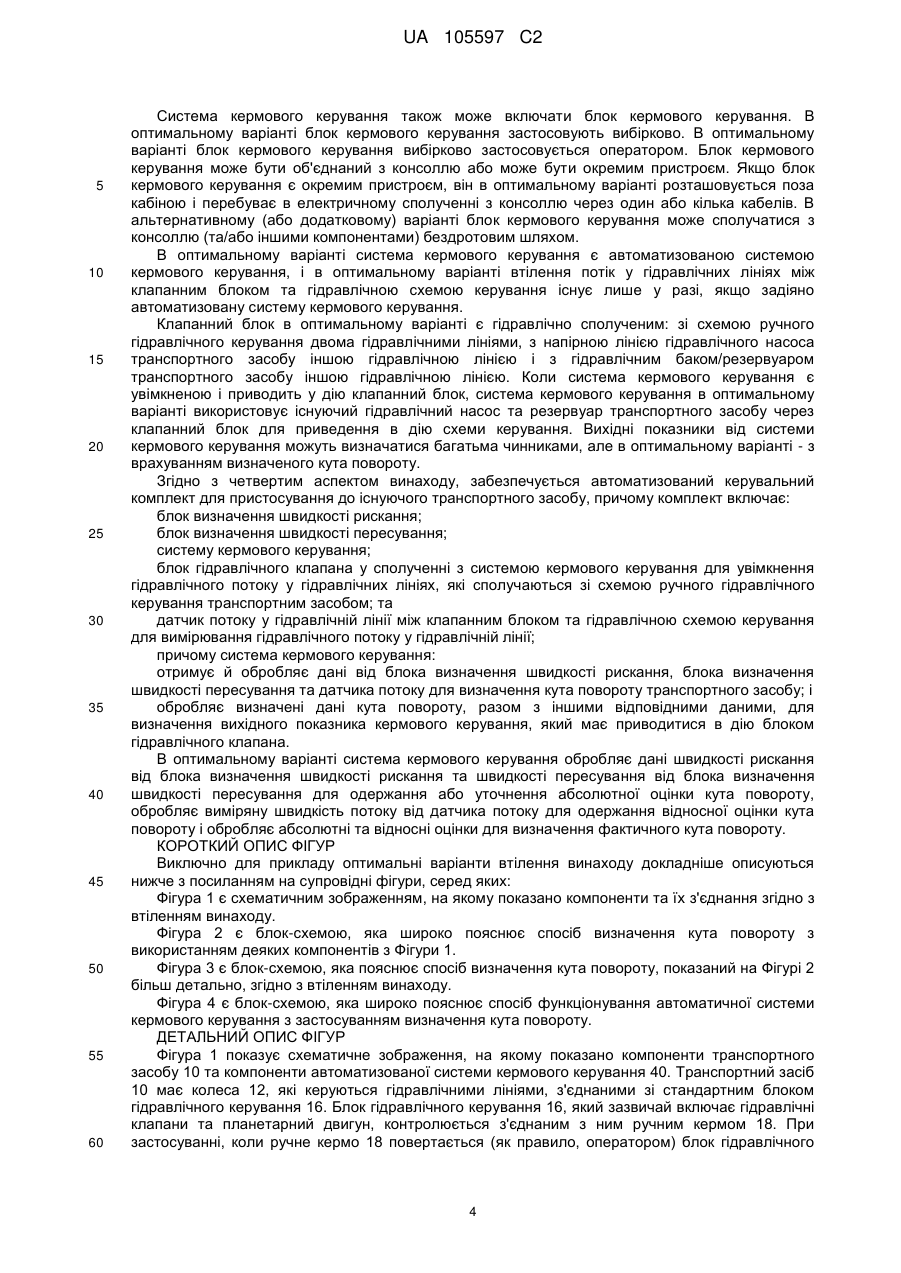
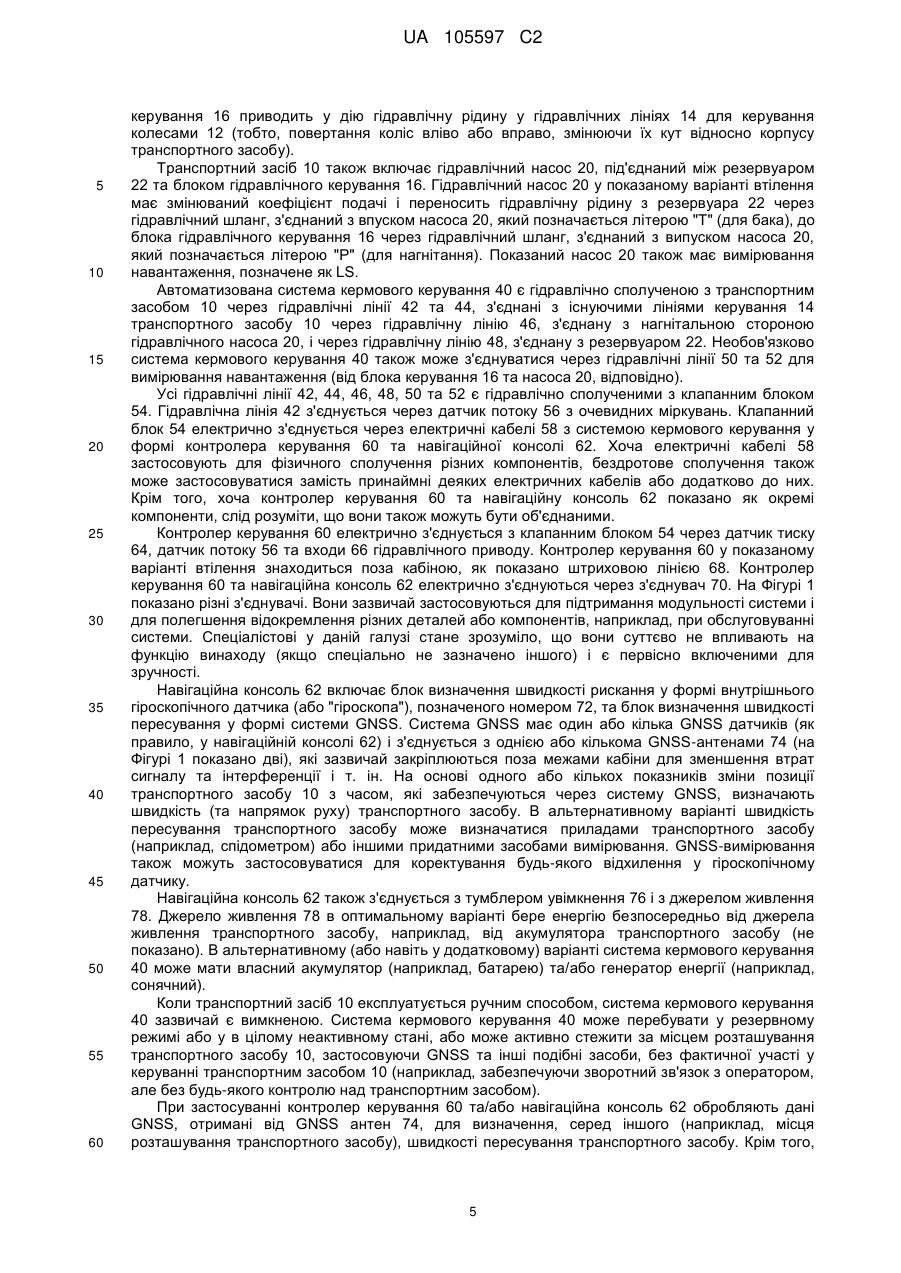
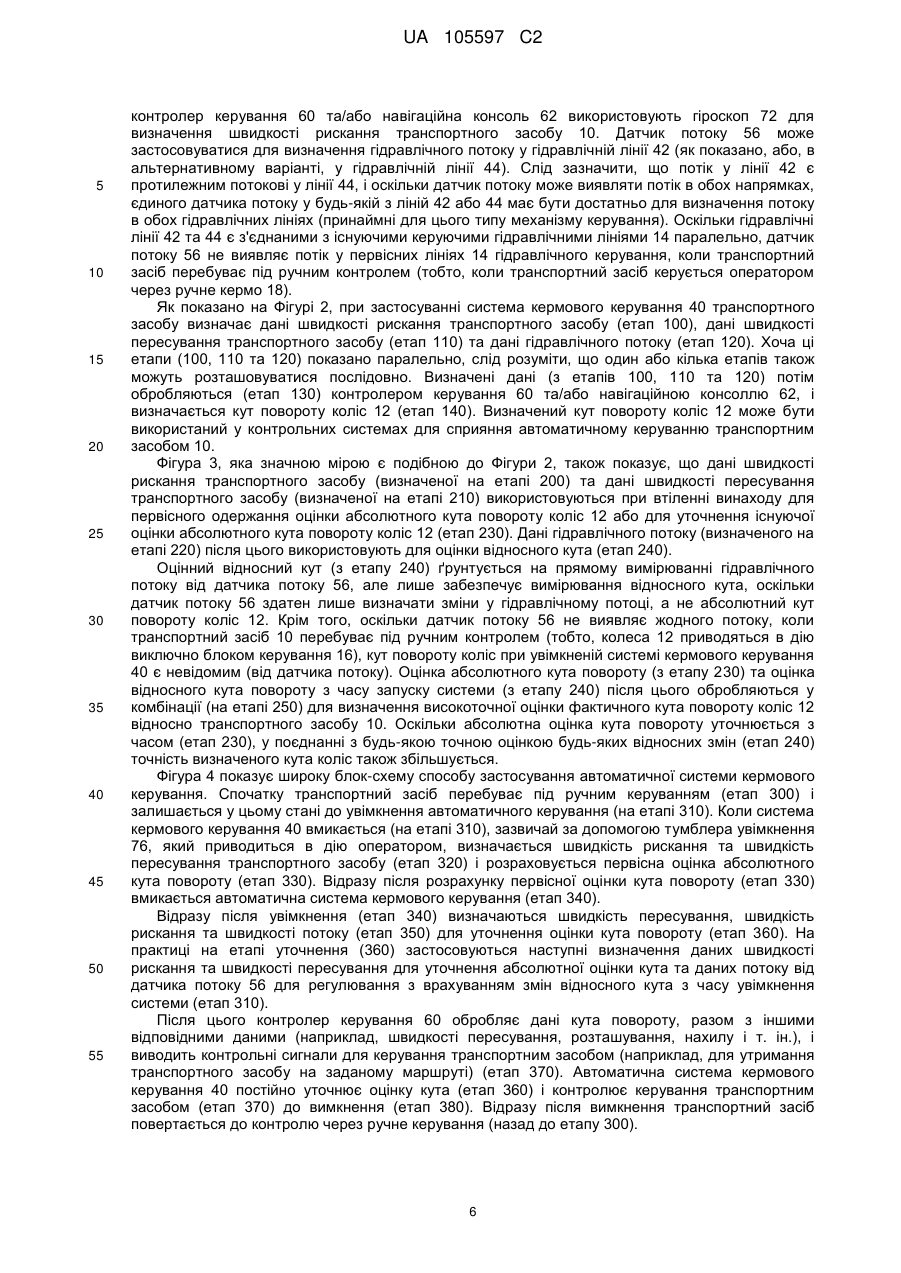
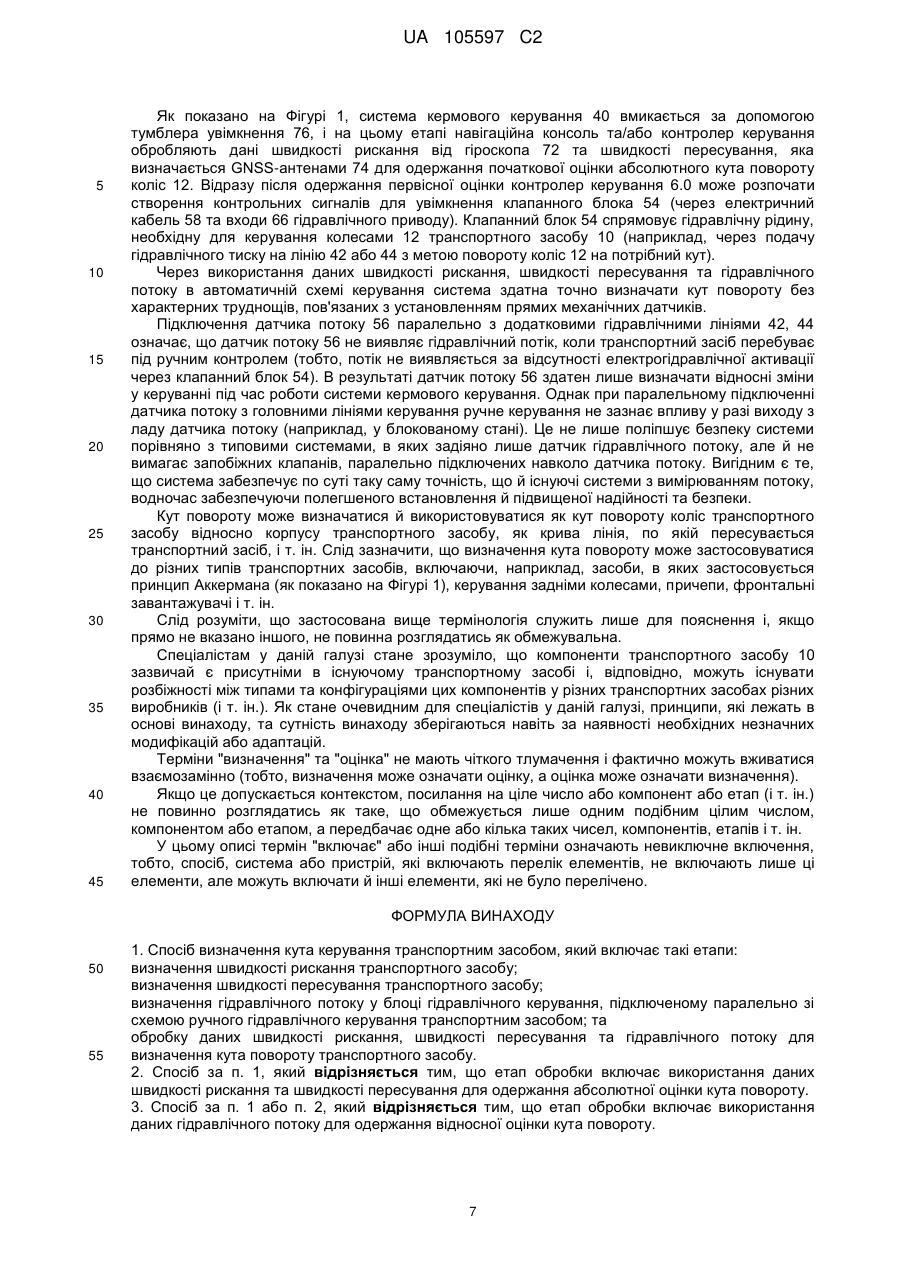
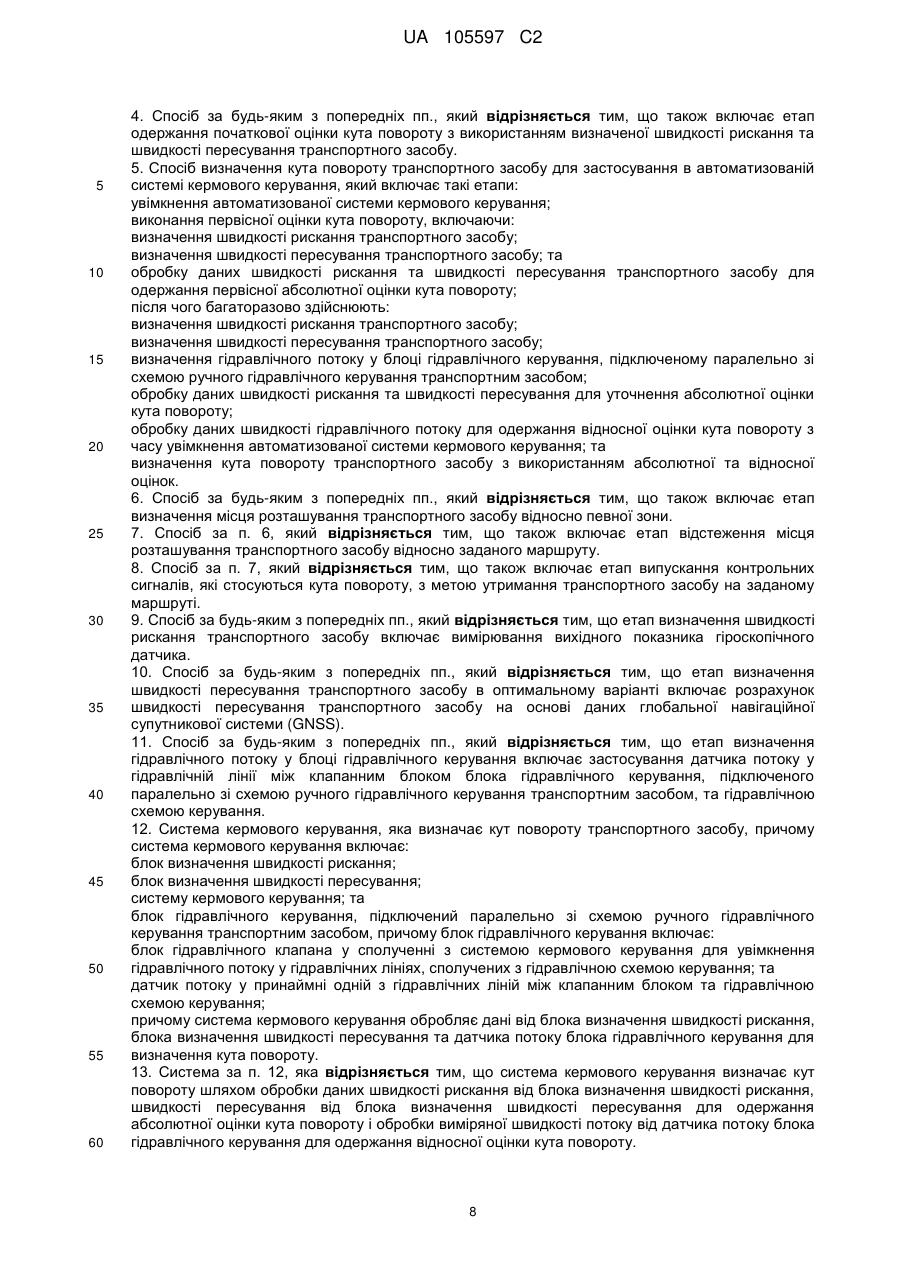
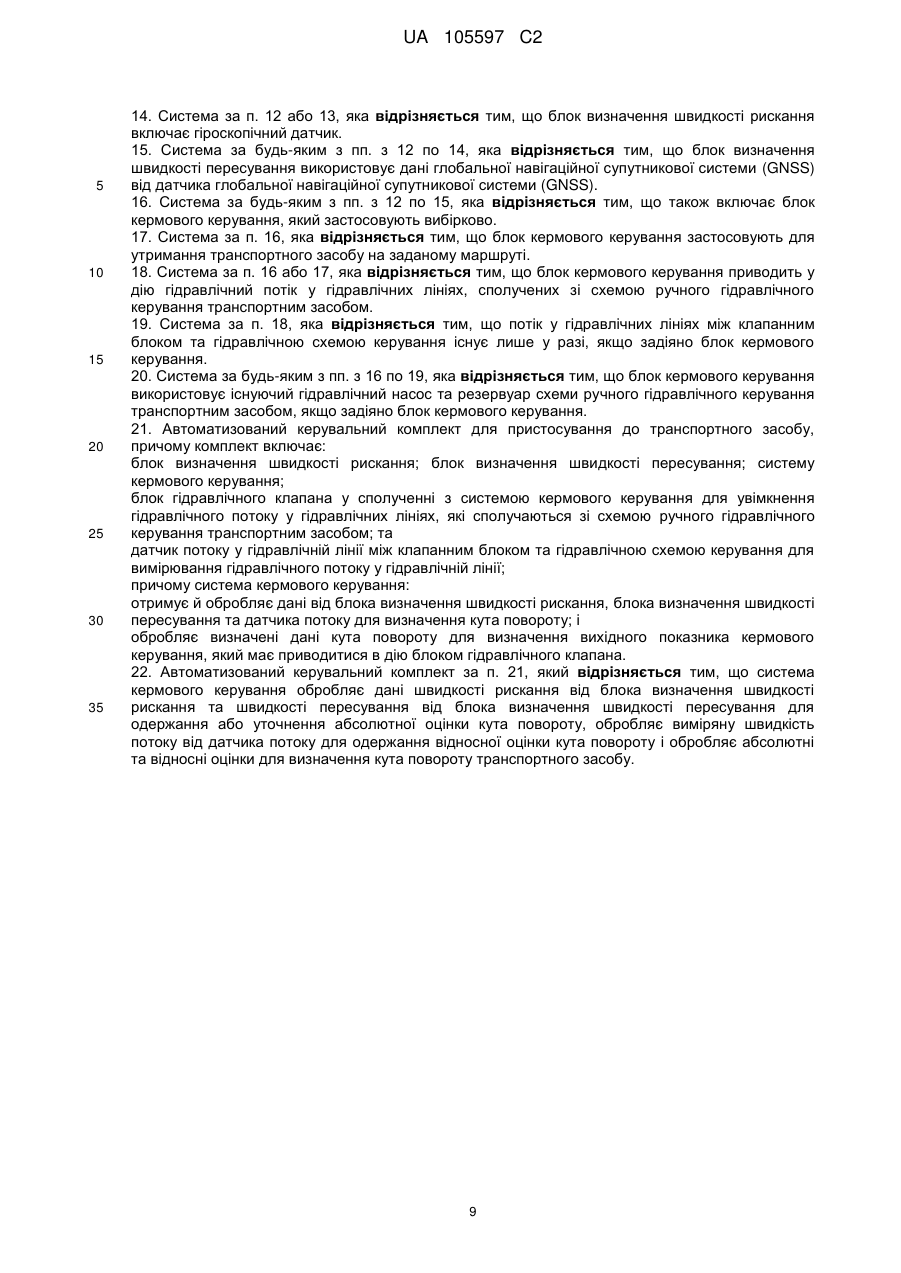
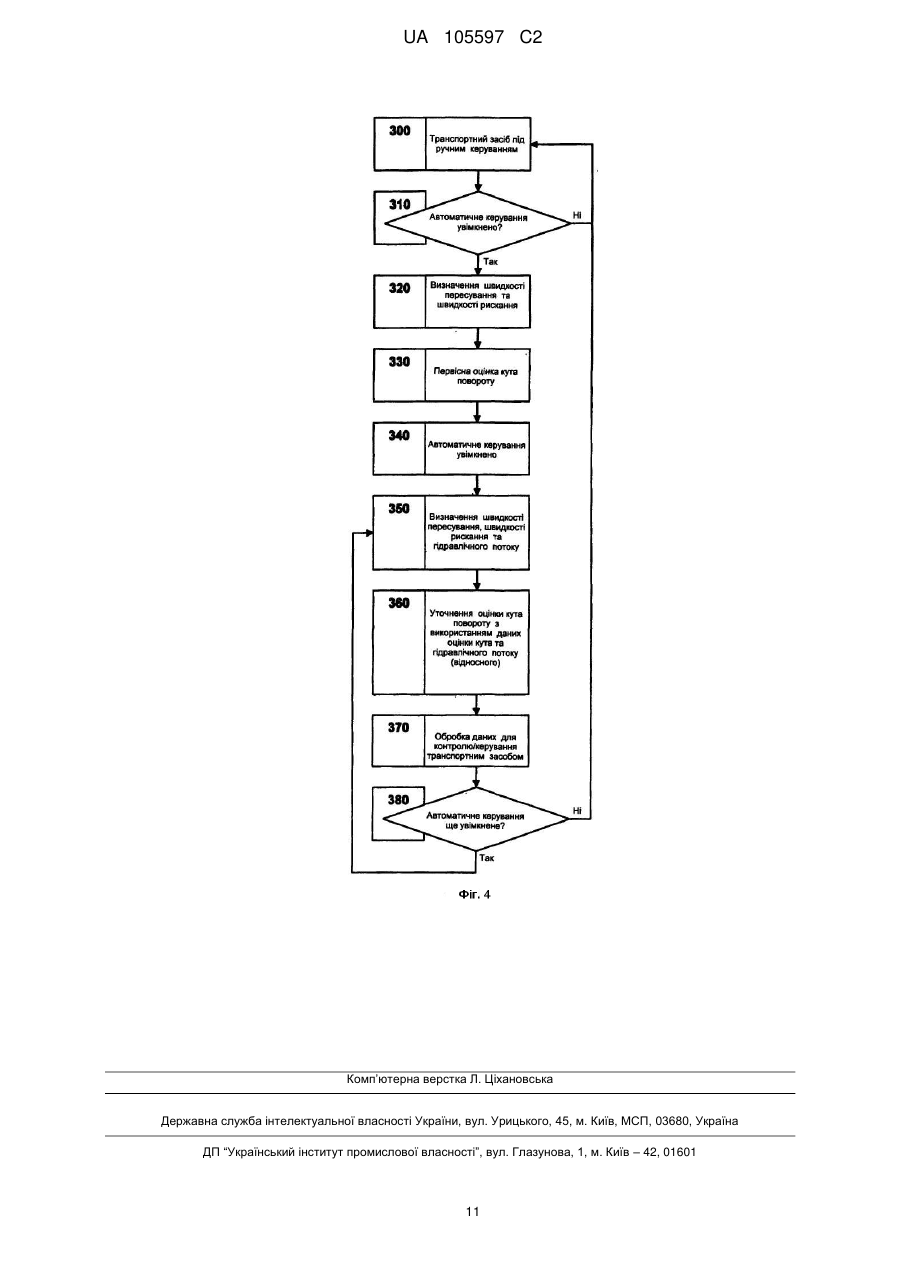
Реферат: Пропонуються спосіб та система для визначення кута повороту транспортного засобу, зокрема сільськогосподарського транспортного засобу, шляхом визначення швидкості рискання транспортного засобу, визначення швидкості пересування транспортного засобу, визначення гідравлічного потоку у блоці гідравлічного керування, підключеному паралельно зі схемою ручного гідравлічного керування транспортним засобом, та обробку даних швидкості рискання, швидкості пересування та гідравлічного потоку для визначення кута повороту транспортного засобу. UA 105597 C2 (12) UA 105597 C2 UA 105597 C2 5 10 15 20 25 30 35 40 ГАЛУЗЬ ВИНАХОДУ Винахід стосується визначення кута повороту транспортного засобу. Зокрема, винахід стосується визначення кута повороту транспортного засобу, який має систему кермового керування з гідравлічним приводом, причому кут визначають, застосовуючи комбінацію принаймні виміряних швидкості рискання, швидкості пересування та гідравлічного потоку. РІВЕНЬ ТЕХНІКИ Автоматизовані навігаційні системи іноді застосовуються для спрямування та/або керування транспортними засобами, зокрема, транспортними засобами, які працюють у позашляхових умовах, наприклад, у сільському господарстві, будівництві, гірничій та лісовій галузях; до них належать трактори, збиральні машини, екскаватори, грейдери, самоскиди та інші самохідні транспортні засоби. Зазвичай навігаційна система призначається для допомоги операторові у спрямуванні транспортного засобу по заданому маршруту, або через надання вказівок операторові транспортного засобу, або через фактичне керування транспортним засобом автономним (або напівавтоматичним) способом. Навігаційні системи зазвичай включають блок глобальної навігаційної супутникової системи (GNSS) (наприклад, з застосуванням кінематики реального часу (RTK), GPS і т. ін.) для визначення, а у багатьох випадках - демонстрації, місця перебування транспортного засобу порівняно з заданою зоною та/або маршрутом. Ці навігаційні системи зазвичай зберігають заданий маршрут у вбудованому запам'ятовуючому пристрої, порівнюють відоме місце розташування транспортного засобу з цим маршрутом і використовують цю інформацію для контролювання вихідного сигналу (наприклад, для забезпечення вказівок або для часткового або повного керування транспортним засобом). Для автономної (або напівавтоматичної) роботи необхідно, щоб навігаційна система керувала транспортним засобом. Однак для того, щоб навігаційна система ефективно керувала транспортним засобом, необхідно знати поточний кут повороту (наприклад, через вимірювання або оцінку). Відомі способи визначення кута повороту коліс транспортного засобу передбачають застосування вимірювання механічного кута, гіроскопічного вимірювання та GNSS-вимірювання, або застосування датчиків гідравлічного потоку у схемі гідравлічного керування. Механічний кут зазвичай вимірюють за допомогою датчика, який безпосередньо вимірює кут коліс транспортного засобу, наприклад, шляхом застосування потенціометра або перетворювача "кут - код" або іншого подібного пристрою. Для гіроскопічного вимірювання та GNSS-вимірювання застосовують гіроскоп для вимірювання швидкості рискання та GNSS для вимірювання швидкості з метою визначення кута повороту. І нарешті, датчики гідравлічного потоку у схемі керування транспортним засобом об'єднують потік гідравлічних рідин до кермового плунжера для визначення кута повороту коліс транспортного засобу. Для комплектів для автоматизованого гідравлічного керування та, меншою мірою, для встановлення автоматизованого гідравлічного керування під час виробництва легкість припасування та точність системи мають ключове значення. Серед вищезгаданих відомих систем вимірювання легкість припасування у порядку погіршення є такою: гіроскопічні та GNSS системи, системи датчиків гідравлічного потоку та системи вимірювання механічного кута. Натомість точність у порядку погіршення є такою: системи вимірювання механічного кута, системи датчиків гідравлічного потоку і гіроскопічні та GNSS системи. Ці дані зведено нижче у таблиці: Таблиця Система: Механічний кут Гідравлічний потік Швидкість рискання / швидкість пересування Точність: Найкраща Середня Найгірша Легкість припасування: Найгірша Середня Найкраща 45 50 Як видно з вищенаведеного, легкість припасування та точність систем в цілому є обернено пропорційними (тобто, найбільш точна найважче піддається припасуванню, і найлегша для припасування є найменш точною). Системи гідравлічного потоку, які займають середню позицію як щодо точності, так і щодо легкості припасування, виглядають як підходящий баланс між параметрами точності та легкості припасування. Однак системи гідравлічного потоку також мають недолік з точки зору безпеки. У цьому плані якщо датчик гідравлічного потоку виходить з ладу у блокованому стані, керування транспортним засобом порушується через недостатність потоку гідравлічної рідини у схемі 1 UA 105597 C2 5 10 15 20 25 30 35 40 45 50 55 керування. Це впливає як на автоматизоване, так і на ручне керування, оскільки датчик потоку пристосовується до діючої схеми керування. Для зменшення цієї значної загрози для безпеки передбачено запобіжні клапани паралельно будь-яким датчикам потоку, що дозволяє операторові контролювати керування транспортним засобом навіть при виході з ладу датчиків потоку. Однак навіть за наявності запобіжних клапанів реакція кермового керування у несправному стані знижується. Хоча це й краще за відсутність запобіжних клапанів, безпека транспортного засобу все одно певною мірою погіршується через зниження реакції кермового керування, подолання якого може вимагатися оператором. МЕТА ВИНАХОДУ Мета цього винаходу полягає у забезпеченні способу та системи для визначення кута повороту коліс транспортного засобу, що дозволяло б подолати або зменшити один чи декілька описаних вище недоліків або проблем, або принаймні забезпечувало б прийнятну альтернативу. КОРОТКИЙ ОПИС ВИНАХОДУ Згідно з першим аспектом винаходу, забезпечується спосіб визначення кута повороту транспортного засобу, причому спосіб включає такі етапи: визначення швидкості рискання транспортного засобу; визначення швидкості пересування транспортного засобу; визначення гідравлічного потоку у блоці гідравлічного керування, підключеному паралельно зі схемою ручного гідравлічного керування транспортним засобом; і обробку даних швидкості рискання, швидкості пересування та гідравлічного потоку для визначення кута повороту транспортного засобу. Етап обробки в оптимальному варіанті включає використання даних швидкості рискання та швидкості пересування для одержання абсолютної оцінки (або уточнення попередньої оцінки) кута повороту та використання даних швидкості потоку для одержання відносної оцінки кута повороту. Спосіб в оптимальному варіанті запускається при задіяному автоматичному керуванні транспортним засобом. В оптимальному варіанті автоматичне керування вмикається оператором. Після увімкнення автоматичного керування етапи визначення швидкості рискання та швидкості пересування транспортного засобу в оптимальному варіанті виконуються першими, а потім етап обробки в оптимальному варіанті використовує вже визначені дані швидкості рискання та швидкості пересування для одержання початкової оцінки кута повороту. Відразу після визначення початкової оцінки кута повороту коліс транспортного засобу в оптимальному варіанті обробляються наступні визначення швидкості рискання та швидкості пересування транспортного засобу для уточнення оцінки кута повороту. Після цього дані швидкості потоку можуть використовуватися для забезпечення відносної оцінки змін кута повороту від блока гідравлічного керування (наприклад, змін з часу увімкнення автоматичного керування). Спосіб також може включати етап визначення місця розташування транспортного засобу відносно певної зони (наприклад, поля, регіону, країни, світу і т. д.). Місце розташування в оптимальному варіанті визначають, застосовуючи GNSS або RTK або іншу подібну систему. Місце розташування транспортного засобу відносно принаймні частини зони може бути показане на дисплеї. В оптимальному варіанті дисплей розташовується у кабіні транспортного засобу. Також можуть бути показані одна або кілька з визначених змінних, таких, як швидкість рискання, швидкість пересування та визначений кут повороту. Спосіб також може включати етап введення заданого маршруту. Заданий маршрут або його частина також може бути показаний на дисплеї. Якщо передбачено заданий маршрут, спосіб в оптимальному варіанті також включає етап відстеження місця розташування транспортного засобу відносно заданого маршруту та випускання контрольних сигналів, які стосуються принаймні кута повороту, з метою утримання транспортного засобу на заданому маршруті. Згідно з другим аспектом винаходу, забезпечується спосіб визначення кута керування транспортним засобом для використання в автоматизованій системі кермового керування, причому спосіб включає такі етапи: увімкнення автоматизованої системи кермового керування; виконання первісної оцінки кута повороту, включаючи: визначення швидкості рискання транспортного засобу; визначення швидкості пересування транспортного засобу; та 2 UA 105597 C2 5 10 15 20 25 30 35 40 45 50 55 60 обробку даних швидкості рискання та швидкості пересування транспортного засобу для одержання первісної абсолютної оцінки кута повороту; після чого, принаймні під час роботи автоматизованої системи кермового керування, багаторазове здійснення: визначення швидкості рискання транспортного засобу; визначення швидкості пересування транспортного засобу; визначення гідравлічного потоку у блоці гідравлічного керування, підключеному паралельно зі схемою ручного гідравлічного керування транспортним засобом; обробки даних швидкості рискання та швидкості пересування для уточнення абсолютної оцінки кута повороту; обробки даних швидкості гідравлічного потоку для одержання відносної оцінки змін кута повороту з часу увімкнення автоматизованої системи кермового керування; та визначення кута повороту транспортного засобу з використанням абсолютної та відносної оцінок. Етап визначення швидкості рискання транспортного засобу в оптимальному варіанті включає вимірювання вихідного показника гіроскопічного датчика. Гіроскопічний датчик в оптимальному варіанті розташовується на корпусі транспортного засобу, у ще кращому варіанті - у кабіні транспортного засобу. Гіроскопічний датчик (або додатковий гіроскопічний датчик) може бути розташований у принаймні одному з коліс транспортного засобу (наприклад, для сприяння визначенню швидкості рискання колеса, а отже, кута колеса транспортного засобу). Етап визначення швидкості пересування транспортного засобу в оптимальному варіанті включає розрахунок швидкості пересування транспортного засобу на основі даних GNSS. Швидкість пересування транспортного засобу також може визначатися приладами транспортного засобу (наприклад, спідометром). Згідно з третім аспектом винаходу, забезпечується система кермового керування, яка визначає кут повороту транспортного засобу, причому система кермового керування включає: блок визначення швидкості рискання; блок визначення швидкості пересування; систему кермового керування; та блок гідравлічного керування, підключений паралельно зі схемою ручного гідравлічного керування транспортним засобом, причому блок гідравлічного керування включає: блок гідравлічного клапана у сполученні з системою кермового керування для увімкнення гідравлічного потоку у гідравлічних лініях, сполучених з гідравлічною схемою керування; та датчик потоку у принаймні одній з гідравлічних ліній між клапанним блоком та гідравлічною схемою керування; причому система кермового керування обробляє дані від блока визначення швидкості рискання, блока визначення швидкості пересування та датчика потоку блока гідравлічного керування для визначення кута повороту транспортного засобу. В оптимальному варіанті система кермового керування визначає кут повороту шляхом обробки даних швидкості рискання від блока визначення швидкості рискання та швидкості пересування від блока визначення швидкості пересування для первісного створення або подальшого уточнення абсолютної оцінки кута повороту і обробки виміряної швидкості потоку від датчика потоку блока гідравлічного керування для одержання відносної оцінки кута повороту. В оптимальному варіанті система кермового керування обробляє абсолютні та відносні оцінки для визначення кута повороту керма. Блок визначення швидкості рискання в оптимальному варіанті включає гіроскопічний датчик. Гіроскопічний датчик в оптимальному варіанті є закріпленим на корпусі транспортного засобу, у ще кращому варіанті - у кабіні транспортного засобу. Гіроскопічний датчик (або додатковий гіроскопічний датчик) може бути розташований у принаймні одному з коліс транспортного засобу (наприклад, для сприяння визначенню швидкості рискання колеса). В оптимальному варіанті система кермового керування також включає GNSS датчик. Блок визначення швидкості пересування в оптимальному варіанті використовує дані GNSS від GNSS датчика для розрахунку швидкості пересування транспортного засобу. Система кермового керування також може включати консоль, в оптимальному варіанті - як частину системи кермового керування. Консоль в оптимальному варіанті забезпечує інтерфейс користувача для оператора для взаємодії та/або сполучення з системою. Консоль в оптимальному варіанті включає дисплей. Консоль в оптимальному варіанті закріплюється у кабіні транспортного засобу (наприклад, на вітровому склі або у гнізді для радіо за стандартом DIN). Консоль в оптимальному варіанті включає GNSS датчик і сполучається з однією або кількома антенами GNSS, які можуть бути закріплені на кабіні із зовні. 3 UA 105597 C2 5 10 15 20 25 30 35 40 45 50 55 60 Система кермового керування також може включати блок кермового керування. В оптимальному варіанті блок кермового керування застосовують вибірково. В оптимальному варіанті блок кермового керування вибірково застосовується оператором. Блок кермового керування може бути об'єднаний з консоллю або може бути окремим пристроєм. Якщо блок кермового керування є окремим пристроєм, він в оптимальному варіанті розташовується поза кабіною і перебуває в електричному сполученні з консоллю через один або кілька кабелів. В альтернативному (або додатковому) варіанті блок кермового керування може сполучатися з консоллю (та/або іншими компонентами) бездротовим шляхом. В оптимальному варіанті система кермового керування є автоматизованою системою кермового керування, і в оптимальному варіанті втілення потік у гідравлічних лініях між клапанним блоком та гідравлічною схемою керування існує лише у разі, якщо задіяно автоматизовану систему кермового керування. Клапанний блок в оптимальному варіанті є гідравлічно сполученим: зі схемою ручного гідравлічного керування двома гідравлічними лініями, з напірною лінією гідравлічного насоса транспортного засобу іншою гідравлічною лінією і з гідравлічним баком/резервуаром транспортного засобу іншою гідравлічною лінією. Коли система кермового керування є увімкненою і приводить у дію клапанний блок, система кермового керування в оптимальному варіанті використовує існуючий гідравлічний насос та резервуар транспортного засобу через клапанний блок для приведення в дію схеми керування. Вихідні показники від системи кермового керування можуть визначатися багатьма чинниками, але в оптимальному варіанті - з врахуванням визначеного кута повороту. Згідно з четвертим аспектом винаходу, забезпечується автоматизований керувальний комплект для пристосування до існуючого транспортного засобу, причому комплект включає: блок визначення швидкості рискання; блок визначення швидкості пересування; систему кермового керування; блок гідравлічного клапана у сполученні з системою кермового керування для увімкнення гідравлічного потоку у гідравлічних лініях, які сполучаються зі схемою ручного гідравлічного керування транспортним засобом; та датчик потоку у гідравлічній лінії між клапанним блоком та гідравлічною схемою керування для вимірювання гідравлічного потоку у гідравлічній лінії; причому система кермового керування: отримує й обробляє дані від блока визначення швидкості рискання, блока визначення швидкості пересування та датчика потоку для визначення кута повороту транспортного засобу; і обробляє визначені дані кута повороту, разом з іншими відповідними даними, для визначення вихідного показника кермового керування, який має приводитися в дію блоком гідравлічного клапана. В оптимальному варіанті система кермового керування обробляє дані швидкості рискання від блока визначення швидкості рискання та швидкості пересування від блока визначення швидкості пересування для одержання або уточнення абсолютної оцінки кута повороту, обробляє виміряну швидкість потоку від датчика потоку для одержання відносної оцінки кута повороту і обробляє абсолютні та відносні оцінки для визначення фактичного кута повороту. КОРОТКИЙ ОПИС ФІГУР Виключно для прикладу оптимальні варіанти втілення винаходу докладніше описуються нижче з посиланням на супровідні фігури, серед яких: Фігура 1 є схематичним зображенням, на якому показано компоненти та їх з'єднання згідно з втіленням винаходу. Фігура 2 є блок-схемою, яка широко пояснює спосіб визначення кута повороту з використанням деяких компонентів з Фігури 1. Фігура 3 є блок-схемою, яка пояснює спосіб визначення кута повороту, показаний на Фігурі 2 більш детально, згідно з втіленням винаходу. Фігура 4 є блок-схемою, яка широко пояснює спосіб функціонування автоматичної системи кермового керування з застосуванням визначення кута повороту. ДЕТАЛЬНИЙ ОПИС ФІГУР Фігура 1 показує схематичне зображення, на якому показано компоненти транспортного засобу 10 та компоненти автоматизованої системи кермового керування 40. Транспортний засіб 10 має колеса 12, які керуються гідравлічними лініями, з'єднаними зі стандартним блоком гідравлічного керування 16. Блок гідравлічного керування 16, який зазвичай включає гідравлічні клапани та планетарний двигун, контролюється з'єднаним з ним ручним кермом 18. При застосуванні, коли ручне кермо 18 повертається (як правило, оператором) блок гідравлічного 4 UA 105597 C2 5 10 15 20 25 30 35 40 45 50 55 60 керування 16 приводить у дію гідравлічну рідину у гідравлічних лініях 14 для керування колесами 12 (тобто, повертання коліс вліво або вправо, змінюючи їх кут відносно корпусу транспортного засобу). Транспортний засіб 10 також включає гідравлічний насос 20, під'єднаний між резервуаром 22 та блоком гідравлічного керування 16. Гідравлічний насос 20 у показаному варіанті втілення має змінюваний коефіцієнт подачі і переносить гідравлічну рідину з резервуара 22 через гідравлічний шланг, з'єднаний з впуском насоса 20, який позначається літерою "T" (для бака), до блока гідравлічного керування 16 через гідравлічний шланг, з'єднаний з випуском насоса 20, який позначається літерою "P" (для нагнітання). Показаний насос 20 також має вимірювання навантаження, позначене як LS. Автоматизована система кермового керування 40 є гідравлічно сполученою з транспортним засобом 10 через гідравлічні лінії 42 та 44, з'єднані з існуючими лініями керування 14 транспортного засобу 10 через гідравлічну лінію 46, з'єднану з нагнітальною стороною гідравлічного насоса 20, і через гідравлічну лінію 48, з'єднану з резервуаром 22. Необов'язково система кермового керування 40 також може з'єднуватися через гідравлічні лінії 50 та 52 для вимірювання навантаження (від блока керування 16 та насоса 20, відповідно). Усі гідравлічні лінії 42, 44, 46, 48, 50 та 52 є гідравлічно сполученими з клапанним блоком 54. Гідравлічна лінія 42 з'єднується через датчик потоку 56 з очевидних міркувань. Клапанний блок 54 електрично з'єднується через електричні кабелі 58 з системою кермового керування у формі контролера керування 60 та навігаційної консолі 62. Хоча електричні кабелі 58 застосовують для фізичного сполучення різних компонентів, бездротове сполучення також може застосовуватися замість принаймні деяких електричних кабелів або додатково до них. Крім того, хоча контролер керування 60 та навігаційну консоль 62 показано як окремі компоненти, слід розуміти, що вони також можуть бути об'єднаними. Контролер керування 60 електрично з'єднується з клапанним блоком 54 через датчик тиску 64, датчик потоку 56 та входи 66 гідравлічного приводу. Контролер керування 60 у показаному варіанті втілення знаходиться поза кабіною, як показано штриховою лінією 68. Контролер керування 60 та навігаційна консоль 62 електрично з'єднуються через з'єднувач 70. На Фігурі 1 показано різні з'єднувачі. Вони зазвичай застосовуються для підтримання модульності системи і для полегшення відокремлення різних деталей або компонентів, наприклад, при обслуговуванні системи. Спеціалістові у даній галузі стане зрозуміло, що вони суттєво не впливають на функцію винаходу (якщо спеціально не зазначено іншого) і є первісно включеними для зручності. Навігаційна консоль 62 включає блок визначення швидкості рискання у формі внутрішнього гіроскопічного датчика (або "гіроскопа"), позначеного номером 72, та блок визначення швидкості пересування у формі системи GNSS. Система GNSS має один або кілька GNSS датчиків (як правило, у навігаційній консолі 62) і з'єднується з однією або кількома GNSS-антенами 74 (на Фігурі 1 показано дві), які зазвичай закріплюються поза межами кабіни для зменшення втрат сигналу та інтерференції і т. ін. На основі одного або кількох показників зміни позиції транспортного засобу 10 з часом, які забезпечуються через систему GNSS, визначають швидкість (та напрямок руху) транспортного засобу. В альтернативному варіанті швидкість пересування транспортного засобу може визначатися приладами транспортного засобу (наприклад, спідометром) або іншими придатними засобами вимірювання. GNSS-вимірювання також можуть застосовуватися для коректування будь-якого відхилення у гіроскопічному датчику. Навігаційна консоль 62 також з'єднується з тумблером увімкнення 76 і з джерелом живлення 78. Джерело живлення 78 в оптимальному варіанті бере енергію безпосередньо від джерела живлення транспортного засобу, наприклад, від акумулятора транспортного засобу (не показано). В альтернативному (або навіть у додатковому) варіанті система кермового керування 40 може мати власний акумулятор (наприклад, батарею) та/або генератор енергії (наприклад, сонячний). Коли транспортний засіб 10 експлуатується ручним способом, система кермового керування 40 зазвичай є вимкненою. Система кермового керування 40 може перебувати у резервному режимі або у в цілому неактивному стані, або може активно стежити за місцем розташування транспортного засобу 10, застосовуючи GNSS та інші подібні засоби, без фактичної участі у керуванні транспортним засобом 10 (наприклад, забезпечуючи зворотний зв'язок з оператором, але без будь-якого контролю над транспортним засобом). При застосуванні контролер керування 60 та/або навігаційна консоль 62 обробляють дані GNSS, отримані від GNSS антен 74, для визначення, серед іншого (наприклад, місця розташування транспортного засобу), швидкості пересування транспортного засобу. Крім того, 5 UA 105597 C2 5 10 15 20 25 30 35 40 45 50 55 контролер керування 60 та/або навігаційна консоль 62 використовують гіроскоп 72 для визначення швидкості рискання транспортного засобу 10. Датчик потоку 56 може застосовуватися для визначення гідравлічного потоку у гідравлічній лінії 42 (як показано, або, в альтернативному варіанті, у гідравлічній лінії 44). Слід зазначити, що потік у лінії 42 є протилежним потокові у лінії 44, і оскільки датчик потоку може виявляти потік в обох напрямках, єдиного датчика потоку у будь-якій з ліній 42 або 44 має бути достатньо для визначення потоку в обох гідравлічних лініях (принаймні для цього типу механізму керування). Оскільки гідравлічні лінії 42 та 44 є з'єднаними з існуючими керуючими гідравлічними лініями 14 паралельно, датчик потоку 56 не виявляє потік у первісних лініях 14 гідравлічного керування, коли транспортний засіб перебуває під ручним контролем (тобто, коли транспортний засіб керується оператором через ручне кермо 18). Як показано на Фігурі 2, при застосуванні система кермового керування 40 транспортного засобу визначає дані швидкості рискання транспортного засобу (етап 100), дані швидкості пересування транспортного засобу (етап 110) та дані гідравлічного потоку (етап 120). Хоча ці етапи (100, 110 та 120) показано паралельно, слід розуміти, що один або кілька етапів також можуть розташовуватися послідовно. Визначені дані (з етапів 100, 110 та 120) потім обробляються (етап 130) контролером керування 60 та/або навігаційною консоллю 62, і визначається кут повороту коліс 12 (етап 140). Визначений кут повороту коліс 12 може бути використаний у контрольних системах для сприяння автоматичному керуванню транспортним засобом 10. Фігура 3, яка значною мірою є подібною до Фігури 2, також показує, що дані швидкості рискання транспортного засобу (визначеної на етапі 200) та дані швидкості пересування транспортного засобу (визначеної на етапі 210) використовуються при втіленні винаходу для первісного одержання оцінки абсолютного кута повороту коліс 12 або для уточнення існуючої оцінки абсолютного кута повороту коліс 12 (етап 230). Дані гідравлічного потоку (визначеного на етапі 220) після цього використовують для оцінки відносного кута (етап 240). Оцінний відносний кут (з етапу 240) ґрунтується на прямому вимірюванні гідравлічного потоку від датчика потоку 56, але лише забезпечує вимірювання відносного кута, оскільки датчик потоку 56 здатен лише визначати зміни у гідравлічному потоці, а не абсолютний кут повороту коліс 12. Крім того, оскільки датчик потоку 56 не виявляє жодного потоку, коли транспортний засіб 10 перебуває під ручним контролем (тобто, колеса 12 приводяться в дію виключно блоком керування 16), кут повороту коліс при увімкненій системі кермового керування 40 є невідомим (від датчика потоку). Оцінка абсолютного кута повороту (з етапу 230) та оцінка відносного кута повороту з часу запуску системи (з етапу 240) після цього обробляються у комбінації (на етапі 250) для визначення високоточної оцінки фактичного кута повороту коліс 12 відносно транспортного засобу 10. Оскільки абсолютна оцінка кута повороту уточнюється з часом (етап 230), у поєднанні з будь-якою точною оцінкою будь-яких відносних змін (етап 240) точність визначеного кута коліс також збільшується. Фігура 4 показує широку блок-схему способу застосування автоматичної системи кермового керування. Спочатку транспортний засіб перебуває під ручним керуванням (етап 300) і залишається у цьому стані до увімкнення автоматичного керування (на етапі 310). Коли система кермового керування 40 вмикається (на етапі 310), зазвичай за допомогою тумблера увімкнення 76, який приводиться в дію оператором, визначається швидкість рискання та швидкість пересування транспортного засобу (етап 320) і розраховується первісна оцінка абсолютного кута повороту (етап 330). Відразу після розрахунку первісної оцінки кута повороту (етап 330) вмикається автоматична система кермового керування (етап 340). Відразу після увімкнення (етап 340) визначаються швидкість пересування, швидкість рискання та швидкості потоку (етап 350) для уточнення оцінки кута повороту (етап 360). На практиці на етапі уточнення (360) застосовуються наступні визначення даних швидкості рискання та швидкості пересування для уточнення абсолютної оцінки кута та даних потоку від датчика потоку 56 для регулювання з врахуванням змін відносного кута з часу увімкнення системи (етап 310). Після цього контролер керування 60 обробляє дані кута повороту, разом з іншими відповідними даними (наприклад, швидкості пересування, розташування, нахилу і т. ін.), і виводить контрольні сигнали для керування транспортним засобом (наприклад, для утримання транспортного засобу на заданому маршруті) (етап 370). Автоматична система кермового керування 40 постійно уточнює оцінку кута (етап 360) і контролює керування транспортним засобом (етап 370) до вимкнення (етап 380). Відразу після вимкнення транспортний засіб повертається до контролю через ручне керування (назад до етапу 300). 6 UA 105597 C2 5 10 15 20 25 30 35 40 45 Як показано на Фігурі 1, система кермового керування 40 вмикається за допомогою тумблера увімкнення 76, і на цьому етапі навігаційна консоль та/або контролер керування обробляють дані швидкості рискання від гіроскопа 72 та швидкості пересування, яка визначається GNSS-антенами 74 для одержання початкової оцінки абсолютного кута повороту коліс 12. Відразу після одержання первісної оцінки контролер керування 6.0 може розпочати створення контрольних сигналів для увімкнення клапанного блока 54 (через електричний кабель 58 та входи 66 гідравлічного приводу). Клапанний блок 54 спрямовує гідравлічну рідину, необхідну для керування колесами 12 транспортного засобу 10 (наприклад, через подачу гідравлічного тиску на лінію 42 або 44 з метою повороту коліс 12 на потрібний кут). Через використання даних швидкості рискання, швидкості пересування та гідравлічного потоку в автоматичній схемі керування система здатна точно визначати кут повороту без характерних труднощів, пов'язаних з установленням прямих механічних датчиків. Підключення датчика потоку 56 паралельно з додатковими гідравлічними лініями 42, 44 означає, що датчик потоку 56 не виявляє гідравлічний потік, коли транспортний засіб перебуває під ручним контролем (тобто, потік не виявляється за відсутності електрогідравлічної активації через клапанний блок 54). В результаті датчик потоку 56 здатен лише визначати відносні зміни у керуванні під час роботи системи кермового керування. Однак при паралельному підключенні датчика потоку з головними лініями керування ручне керування не зазнає впливу у разі виходу з ладу датчика потоку (наприклад, у блокованому стані). Це не лише поліпшує безпеку системи порівняно з типовими системами, в яких задіяно лише датчик гідравлічного потоку, але й не вимагає запобіжних клапанів, паралельно підключених навколо датчика потоку. Вигідним є те, що система забезпечує по суті таку саму точність, що й існуючі системи з вимірюванням потоку, водночас забезпечуючи полегшеного встановлення й підвищеної надійності та безпеки. Кут повороту може визначатися й використовуватися як кут повороту коліс транспортного засобу відносно корпусу транспортного засобу, як крива лінія, по якій пересувається транспортний засіб, і т. ін. Слід зазначити, що визначення кута повороту може застосовуватися до різних типів транспортних засобів, включаючи, наприклад, засоби, в яких застосовується принцип Аккермана (як показано на Фігурі 1), керування задніми колесами, причепи, фронтальні завантажувачі і т. ін. Слід розуміти, що застосована вище термінологія служить лише для пояснення і, якщо прямо не вказано іншого, не повинна розглядатись як обмежувальна. Спеціалістам у даній галузі стане зрозуміло, що компоненти транспортного засобу 10 зазвичай є присутніми в існуючому транспортному засобі і, відповідно, можуть існувати розбіжності між типами та конфігураціями цих компонентів у різних транспортних засобах різних виробників (і т. ін.). Як стане очевидним для спеціалістів у даній галузі, принципи, які лежать в основі винаходу, та сутність винаходу зберігаються навіть за наявності необхідних незначних модифікацій або адаптацій. Терміни "визначення" та "оцінка" не мають чіткого тлумачення і фактично можуть вживатися взаємозамінно (тобто, визначення може означати оцінку, а оцінка може означати визначення). Якщо це допускається контекстом, посилання на ціле число або компонент або етап (і т. ін.) не повинно розглядатись як таке, що обмежується лише одним подібним цілим числом, компонентом або етапом, а передбачає одне або кілька таких чисел, компонентів, етапів і т. ін. У цьому описі термін "включає" або інші подібні терміни означають невиключне включення, тобто, спосіб, система або пристрій, які включають перелік елементів, не включають лише ці елементи, але можуть включати й інші елементи, які не було перелічено. ФОРМУЛА ВИНАХОДУ 50 55 1. Спосіб визначення кута керування транспортним засобом, який включає такі етапи: визначення швидкості рискання транспортного засобу; визначення швидкості пересування транспортного засобу; визначення гідравлічного потоку у блоці гідравлічного керування, підключеному паралельно зі схемою ручного гідравлічного керування транспортним засобом; та обробку даних швидкості рискання, швидкості пересування та гідравлічного потоку для визначення кута повороту транспортного засобу. 2. Спосіб за п. 1, який відрізняється тим, що етап обробки включає використання даних швидкості рискання та швидкості пересування для одержання абсолютної оцінки кута повороту. 3. Спосіб за п. 1 або п. 2, який відрізняється тим, що етап обробки включає використання даних гідравлічного потоку для одержання відносної оцінки кута повороту. 7 UA 105597 C2 5 10 15 20 25 30 35 40 45 50 55 60 4. Спосіб за будь-яким з попередніх пп., який відрізняється тим, що також включає етап одержання початкової оцінки кута повороту з використанням визначеної швидкості рискання та швидкості пересування транспортного засобу. 5. Спосіб визначення кута повороту транспортного засобу для застосування в автоматизованій системі кермового керування, який включає такі етапи: увімкнення автоматизованої системи кермового керування; виконання первісної оцінки кута повороту, включаючи: визначення швидкості рискання транспортного засобу; визначення швидкості пересування транспортного засобу; та обробку даних швидкості рискання та швидкості пересування транспортного засобу для одержання первісної абсолютної оцінки кута повороту; після чого багаторазово здійснюють: визначення швидкості рискання транспортного засобу; визначення швидкості пересування транспортного засобу; визначення гідравлічного потоку у блоці гідравлічного керування, підключеному паралельно зі схемою ручного гідравлічного керування транспортним засобом; обробку даних швидкості рискання та швидкості пересування для уточнення абсолютної оцінки кута повороту; обробку даних швидкості гідравлічного потоку для одержання відносної оцінки кута повороту з часу увімкнення автоматизованої системи кермового керування; та визначення кута повороту транспортного засобу з використанням абсолютної та відносної оцінок. 6. Спосіб за будь-яким з попередніх пп., який відрізняється тим, що також включає етап визначення місця розташування транспортного засобу відносно певної зони. 7. Спосіб за п. 6, який відрізняється тим, що також включає етап відстеження місця розташування транспортного засобу відносно заданого маршруту. 8. Спосіб за п. 7, який відрізняється тим, що також включає етап випускання контрольних сигналів, які стосуються кута повороту, з метою утримання транспортного засобу на заданому маршруті. 9. Спосіб за будь-яким з попередніх пп., який відрізняється тим, що етап визначення швидкості рискання транспортного засобу включає вимірювання вихідного показника гіроскопічного датчика. 10. Спосіб за будь-яким з попередніх пп., який відрізняється тим, що етап визначення швидкості пересування транспортного засобу в оптимальному варіанті включає розрахунок швидкості пересування транспортного засобу на основі даних глобальної навігаційної супутникової системи (GNSS). 11. Спосіб за будь-яким з попередніх пп., який відрізняється тим, що етап визначення гідравлічного потоку у блоці гідравлічного керування включає застосування датчика потоку у гідравлічній лінії між клапанним блоком блока гідравлічного керування, підключеного паралельно зі схемою ручного гідравлічного керування транспортним засобом, та гідравлічною схемою керування. 12. Система кермового керування, яка визначає кут повороту транспортного засобу, причому система кермового керування включає: блок визначення швидкості рискання; блок визначення швидкості пересування; систему кермового керування; та блок гідравлічного керування, підключений паралельно зі схемою ручного гідравлічного керування транспортним засобом, причому блок гідравлічного керування включає: блок гідравлічного клапана у сполученні з системою кермового керування для увімкнення гідравлічного потоку у гідравлічних лініях, сполучених з гідравлічною схемою керування; та датчик потоку у принаймні одній з гідравлічних ліній між клапанним блоком та гідравлічною схемою керування; причому система кермового керування обробляє дані від блока визначення швидкості рискання, блока визначення швидкості пересування та датчика потоку блока гідравлічного керування для визначення кута повороту. 13. Система за п. 12, яка відрізняється тим, що система кермового керування визначає кут повороту шляхом обробки даних швидкості рискання від блока визначення швидкості рискання, швидкості пересування від блока визначення швидкості пересування для одержання абсолютної оцінки кута повороту і обробки виміряної швидкості потоку від датчика потоку блока гідравлічного керування для одержання відносної оцінки кута повороту. 8 UA 105597 C2 5 10 15 20 25 30 35 14. Система за п. 12 або 13, яка відрізняється тим, що блок визначення швидкості рискання включає гіроскопічний датчик. 15. Система за будь-яким з пп. з 12 по 14, яка відрізняється тим, що блок визначення швидкості пересування використовує дані глобальної навігаційної супутникової системи (GNSS) від датчика глобальної навігаційної супутникової системи (GNSS). 16. Система за будь-яким з пп. з 12 по 15, яка відрізняється тим, що також включає блок кермового керування, який застосовують вибірково. 17. Система за п. 16, яка відрізняється тим, що блок кермового керування застосовують для утримання транспортного засобу на заданому маршруті. 18. Система за п. 16 або 17, яка відрізняється тим, що блок кермового керування приводить у дію гідравлічний потік у гідравлічних лініях, сполучених зі схемою ручного гідравлічного керування транспортним засобом. 19. Система за п. 18, яка відрізняється тим, що потік у гідравлічних лініях між клапанним блоком та гідравлічною схемою керування існує лише у разі, якщо задіяно блок кермового керування. 20. Система за будь-яким з пп. з 16 по 19, яка відрізняється тим, що блок кермового керування використовує існуючий гідравлічний насос та резервуар схеми ручного гідравлічного керування транспортним засобом, якщо задіяно блок кермового керування. 21. Автоматизований керувальний комплект для пристосування до транспортного засобу, причому комплект включає: блок визначення швидкості рискання; блок визначення швидкості пересування; систему кермового керування; блок гідравлічного клапана у сполученні з системою кермового керування для увімкнення гідравлічного потоку у гідравлічних лініях, які сполучаються зі схемою ручного гідравлічного керування транспортним засобом; та датчик потоку у гідравлічній лінії між клапанним блоком та гідравлічною схемою керування для вимірювання гідравлічного потоку у гідравлічній лінії; причому система кермового керування: отримує й обробляє дані від блока визначення швидкості рискання, блока визначення швидкості пересування та датчика потоку для визначення кута повороту; і обробляє визначені дані кута повороту для визначення вихідного показника кермового керування, який має приводитися в дію блоком гідравлічного клапана. 22. Автоматизований керувальний комплект за п. 21, який відрізняється тим, що система кермового керування обробляє дані швидкості рискання від блока визначення швидкості рискання та швидкості пересування від блока визначення швидкості пересування для одержання або уточнення абсолютної оцінки кута повороту, обробляє виміряну швидкість потоку від датчика потоку для одержання відносної оцінки кута повороту і обробляє абсолютні та відносні оцінки для визначення кута повороту транспортного засобу. 9 UA 105597 C2 10 UA 105597 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 11
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and system for the determination of a steering angle
Автори англійськоюSmits, Erik, Fraser, Matthew
Автори російськоюСмитс Эрик, Фрейзер Мэтью
МПК / Мітки
МПК: G05B 1/00, B62D 1/00, B62D 101/00, B62D 137/00, B62D 123/00, B62D 15/00, B62D 5/00, B62D 6/00
Мітки: визначення, спосіб, кута, система, повороту
Код посилання
<a href="https://ua.patents.su/13-105597-sposib-ta-sistema-dlya-viznachennya-kuta-povorotu.html" target="_blank" rel="follow" title="База патентів України">Спосіб та система для визначення кута повороту</a>
Перетворювач кута повороту антени рлс в код синуса кута повороту
Номер патенту: 28555
Опубліковано: 10.12.2007
Автор: Ніколенко Сергій Іванович
МПК: G08C 19/00
Мітки: код, повороту, кута, перетворювач, антени, рлс, синуса
Формула / Реферат:
Перетворювач кута повороту антени РЛС в код синуса кута повороту, що містить потенціометричний датчик синуса кута повороту вала, вхідна вісь якого з'єднана з антеною РЛС, а його вихід з'єднаний із входом аналого-цифрового перетворювача (АЦП), який відрізняється тим, що в нього введені другий АЦП, вхід якого підключений до входу опорної напруги, і блок інтерфейсу з шиною вводу-виводу комп'ютера, входи якого підключені до виходів першого і...
Двовідліковий перетворювач кута повороту вала в код

Номер патенту: 27771
Опубліковано: 12.11.2007
Автор: Ніколенко Сергій Іванович
МПК: G08C 19/00
Мітки: перетворювач, кута, повороту, двовідліковий, код, вала
Формула / Реферат:
Двовідліковий перетворювач кута повороту вала в код, що містить сельсини грубого і точного відліків, з'єднані через редуктор, вихідні обмотки сельсинів підключені до входів одновідлікових перетворювачів кут-код грубого і точного відліків, відповідно, який відрізняється тим, що в нього уведений блок інтерфейсу із шиною вводу-виводу комп’ютера, вхід якого підключений до виходів перетворювачів кут-код точного і грубого відліків, а вихід...
Двовідліковий перетворювач кута повороту вала в код з автоконтролем

Номер патенту: 65793
Опубліковано: 12.12.2011
Автор: Ніколенко Сергій Іванович
МПК: G08C 19/00
Мітки: повороту, код, кута, вала, перетворювач, автоконтролем, двовідліковий
Формула / Реферат:
Двовідліковий перетворювач кута повороту вала в код з автоконтролем, що містить сельсини грубого і точного відліків, з'єднані через редуктор, вхідні обмотки яких підключені до шини змінної напруги, блок інтерфейсу з шиною вводу-виводу комп'ютера, вхід якого підключений до виходів перетворювачів кут-код точного і грубого відліків, а вихід з'єднаний з шиною вводу-виводу комп'ютера, який відрізняється тим, що в нього введені блок формування...
Слідкуючий перетворювач кута повороту вала в код

Номер патенту: 3149
Опубліковано: 15.10.2004
Автор: Ніколенко Сергій Іванович
МПК: G08C 19/00, H03M 1/64
Мітки: перетворювач, код, кута, слідкуючий, вала, повороту
Формула / Реферат:
Слідкуючий перетворювач кута повороту вала в код, що містить синусно-косинусний датчик кута, виходи якого з'єднані з першими входами блоків множення, виходи яких підключені до входів блока віднімання, вихід якого підключений до входу компаратора і входу блока перетворення амплітуди напруги у послідовний код, вихід якого з'єднаний з лічильним входом реверсивного лічильника, який через блок синусно-косинусного перетворення коду підключений до...
Пристрій для нормування похибки кута повороту крокового двигуна

Номер патенту: 19455
Опубліковано: 15.12.2006
Автори: Кухарчук Василь Васильович, Усов Віктор Васильович
МПК: G01B 11/26
Мітки: повороту, пристрій, кута, крокового, двигуна, нормування, похибки
Формула / Реферат:
Пристрій для нормування похибки кута повороту крокового двигуна, що містить корпус з посадочним гніздом для досліджуваного крокового двигуна і вихідну шину, який відрізняється тим, що в нього введені мікропроцесорний контролер, який містить таймер-лічильник та енергозалежну пам'ять, перші одинадцять виходів якого підключені до одинадцятирозрядної вихідної шини, а другі десять виходів з'єднані з десятирозрядною вихідною шиною, причому блок...
Попередній патент: Тримач ділянки ін’єкційної голки з загостреним кінцем с.о. іванова-м.м. рожка
Випадковий патент: Пристрій для дослідження внутрішніх напружень у ґрунтовому напівпросторі