Багатокоординатний силовий тренажер стрільця з комбінованими електромеханічними приводами
Номер патенту: 108055
Опубліковано: 10.03.2015
Автори: Беліков Віктор Тріфонович, Яглінський Віктор Петрович, Фелько Микола В'ячеславович, Кравчук Олег Іванович







Формула / Реферат
1. Багатокоординатний силовий тренажер стрільця з комбінованими електромеханічними приводами, що складається з двокоординатного функціонального блока-модуля, який являє собою кінематичне об'єднання двох пар взаємно перпендикулярних однокоординатних лінійних широкорегульованих електричних приводів з високою перевантажувальною здатністю, прямолінійні шляхові структури яких попарно паралельно встановлені уздовж кожної з чотирьох меж квадратної координатної площини, що обслуговується, при цьому симетрично розміщені один проти одного активні рухливі блоки-модулі координатних лінійних електричних двигунів жорстко закріплені на взаємно перпендикулярних напрямних координатних стрижнях, що знаходяться у паралельних площинах, причому двокоординатний функціональний блок-модуль забезпечений горизонтальною площадкою довільної форми, яку розміщено всередині квадратної координатної площини і несучої дві пари опор кочення, у яких з можливістю вільного переміщення проходять напрямні координатні стрижні, який відрізняється тим, що він містить основний рухомий транспортний елемент у вигляді горизонтальної жорсткої кільцевої рами, на якій симетрично відносно вертикальної осі закріплені з можливістю обертання відносно власних вертикальних осей три або більше кронштейнів, кожен з яких має змогу повороту навкруги вертикальної осі з допомогою плаского поворотного торцевого електродвигуна і несе опорне колесо вказаного рухомого транспортного елемента, у ободі якого убудований широкорегульований приводний тяговий електричний двигун, причому на кільцевій рамі встановлений двокоординатний функціональний блок-модуль, на рухомій координатній площині якого жорстко або з можливістю повороту відносно її вертикальної осі закріплена основа бігової доріжки навантаження, та нерухомого елемента - полігону у вигляді жорсткого або гнучкого металевого, композитного або комбінованого шляхового елемента, що має пласку або довільну конфігурацію.
2. Багатокоординатний силовий тренажер стрільця з комбінованими електромеханічними приводами за п. 1, який відрізняється тим, що кінцеві частини бічних елементів пласкої шляхової смуги переміщення рухливої частини тренажера забезпечені одним або більше підйомними механізмами регулювання радіуса їх кривизни.
Текст
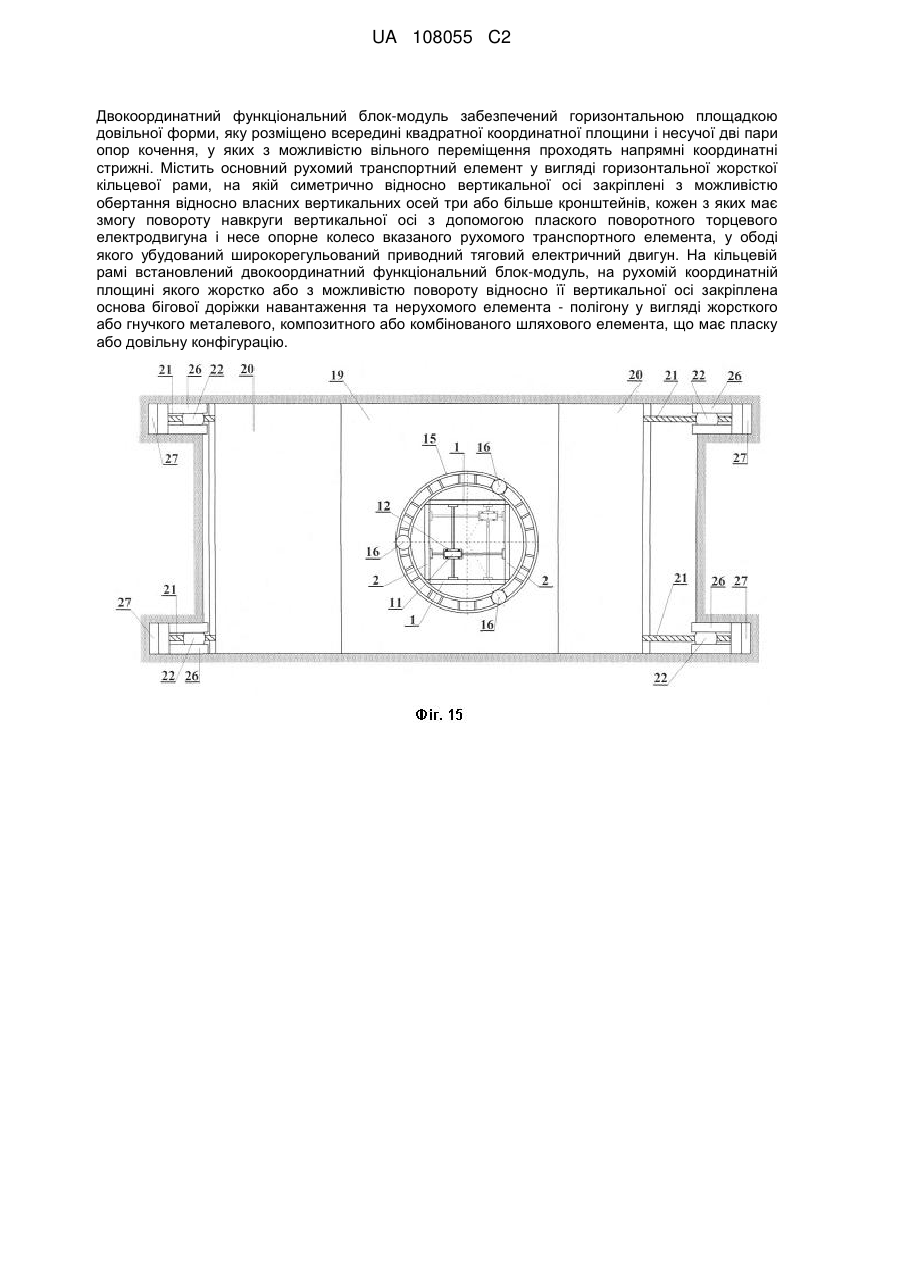
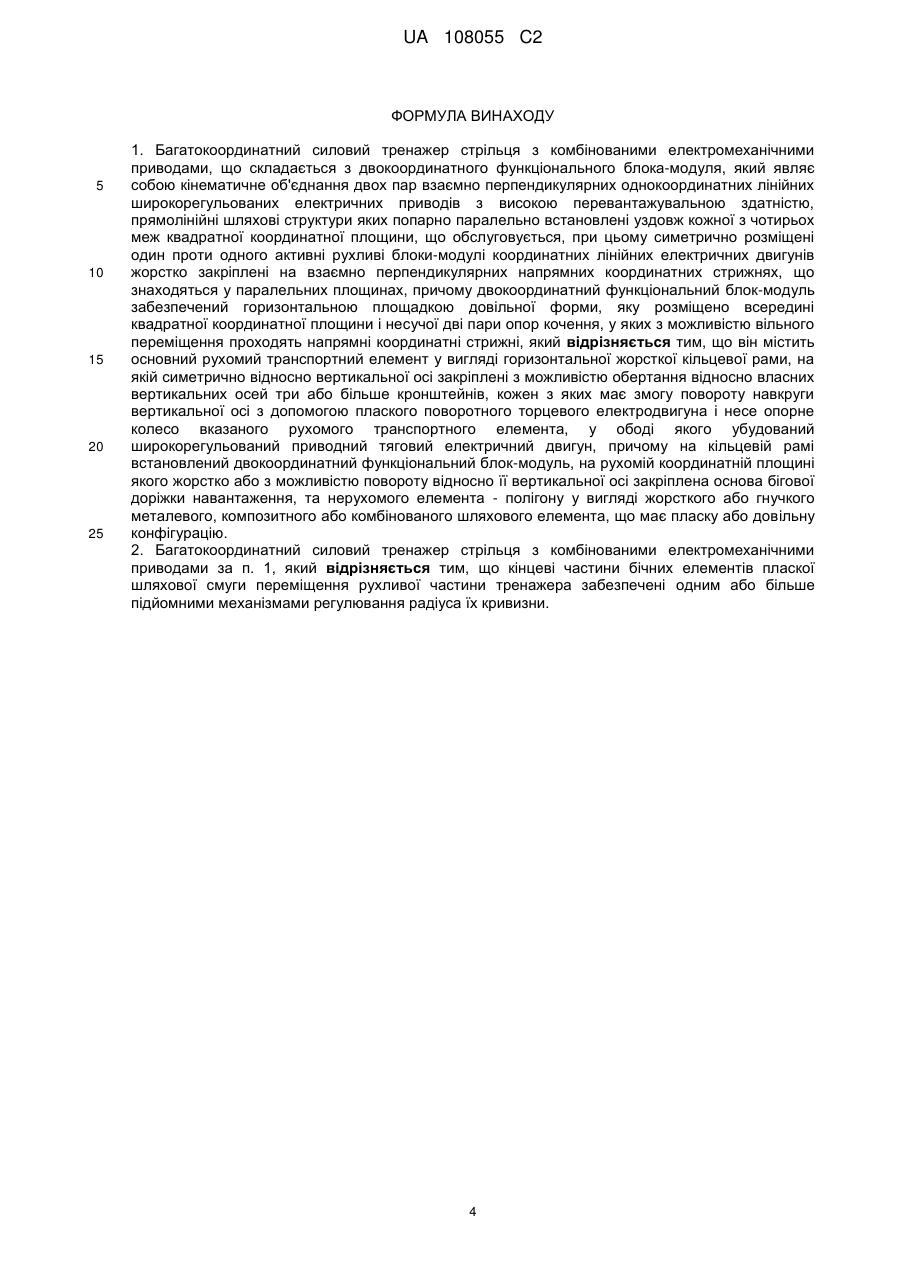
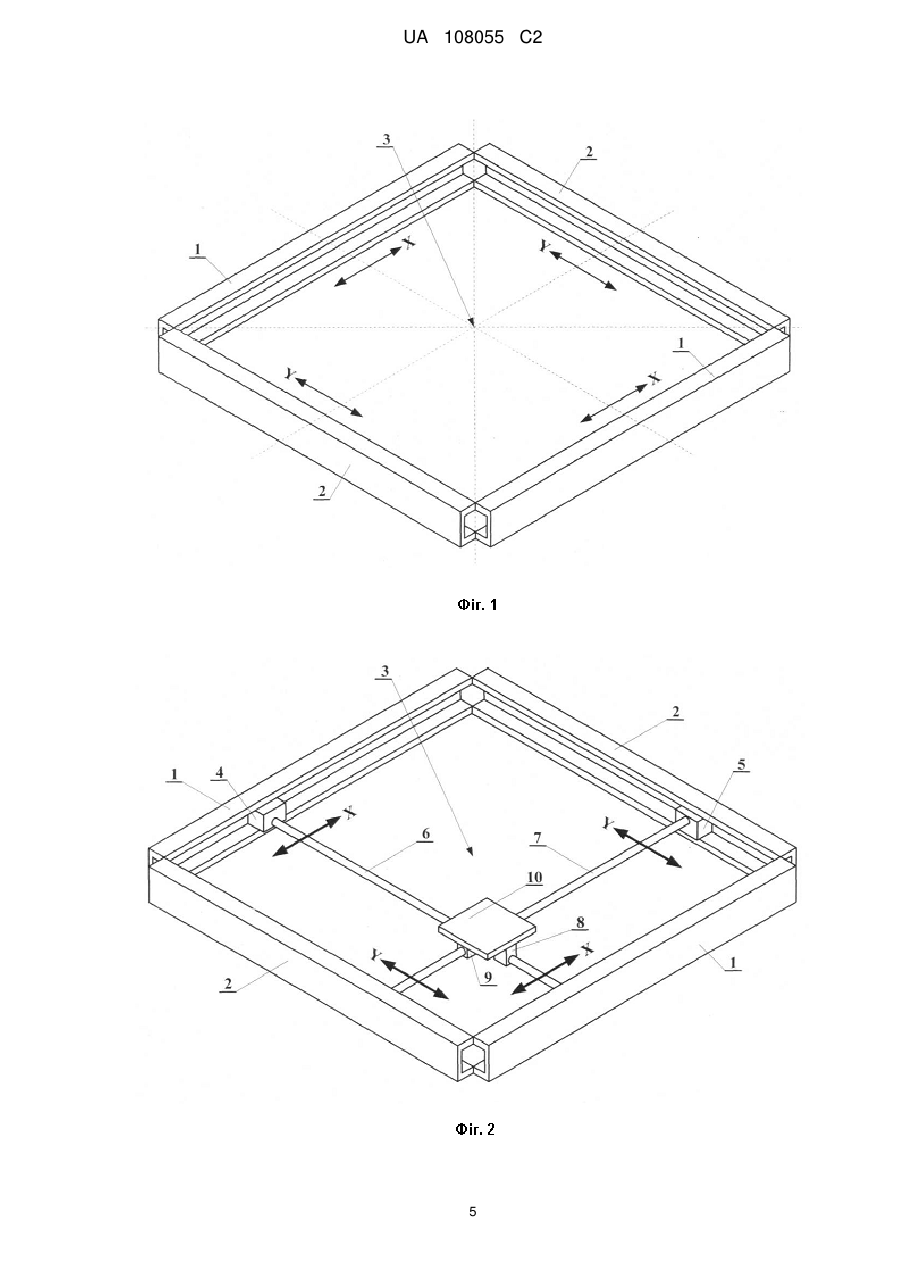
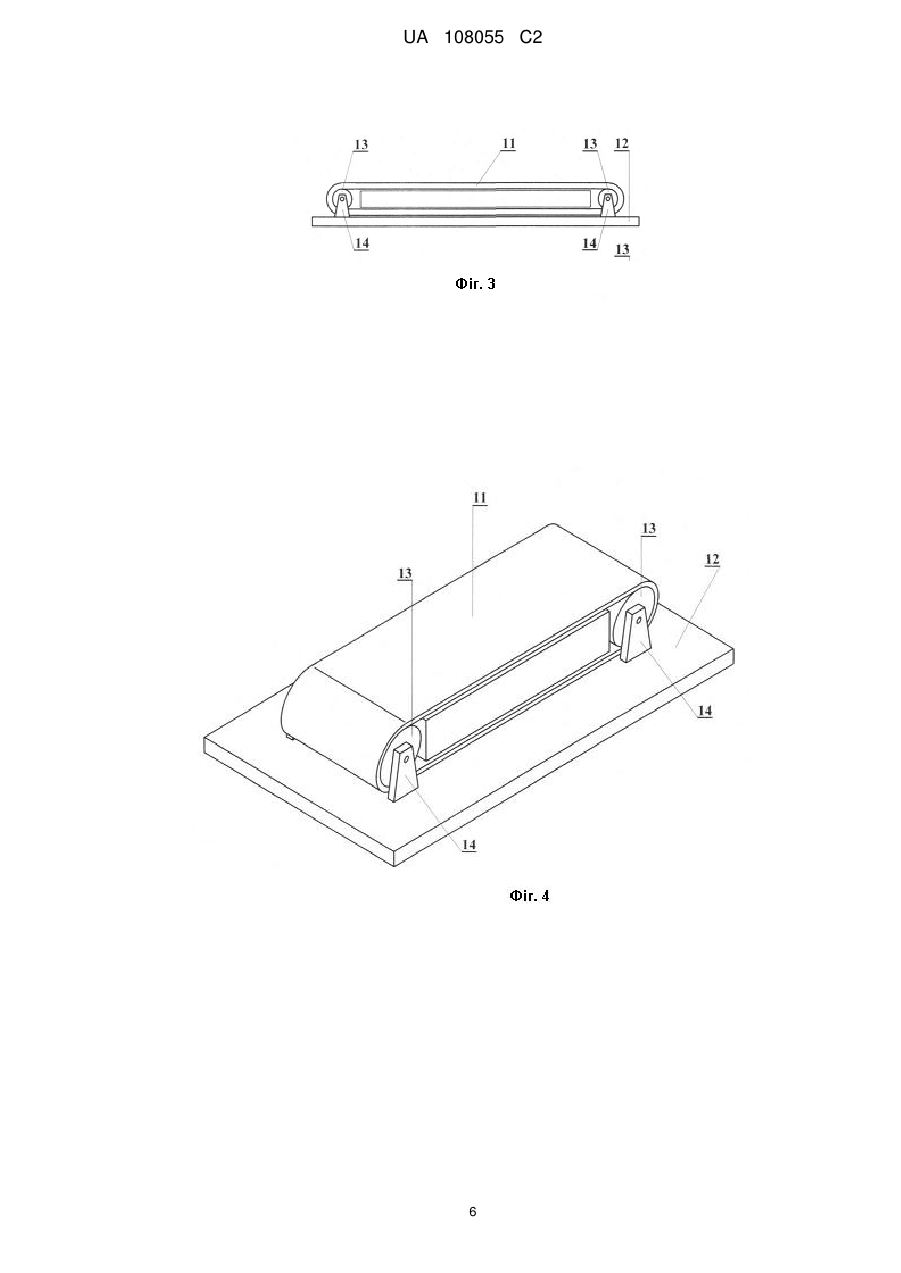
Реферат: Винахід належить до військової техніки. Багатокоординатний силовий тренажер стрільця з комбінованими електромеханічними приводами складається з двокоординатного функціонального блока-модуля, який являє собою кінематичне об'єднання двох пар взаємно перпендикулярних однокоординатних лінійних широкорегульованих електричних приводів з високою перевантажувальною здатністю, прямолінійні шляхові структури яких попарно паралельно встановлені уздовж кожної з чотирьох меж квадратної координатної площини, що обслуговується. Симетрично розміщені один проти одного активні рухливі блоки-модулі координатних лінійних електричних двигунів жорстко закріплені на взаємно перпендикулярних напрямних координатних стрижнях, що знаходяться у паралельних площинах. UA 108055 C2 (12) UA 108055 C2 Двокоординатний функціональний блок-модуль забезпечений горизонтальною площадкою довільної форми, яку розміщено всередині квадратної координатної площини і несучої дві пари опор кочення, у яких з можливістю вільного переміщення проходять напрямні координатні стрижні. Містить основний рухомий транспортний елемент у вигляді горизонтальної жорсткої кільцевої рами, на якій симетрично відносно вертикальної осі закріплені з можливістю обертання відносно власних вертикальних осей три або більше кронштейнів, кожен з яких має змогу повороту навкруги вертикальної осі з допомогою плаского поворотного торцевого електродвигуна і несе опорне колесо вказаного рухомого транспортного елемента, у ободі якого убудований широкорегульований приводний тяговий електричний двигун. На кільцевій рамі встановлений двокоординатний функціональний блок-модуль, на рухомій координатній площині якого жорстко або з можливістю повороту відносно її вертикальної осі закріплена основа бігової доріжки навантаження та нерухомого елемента - полігону у вигляді жорсткого або гнучкого металевого, композитного або комбінованого шляхового елемента, що має пласку або довільну конфігурацію. UA 108055 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі військової техніки, а саме, до спеціальної тренажерної техніки військового призначення, яка призначена для індивідуального стрілецького тренування бійців з метою вироблення у них стійких навичок стрільби із стрілецької зброї при постійному силовому подоланні ними різноспрямованих динамічних зусиль, які виникають, наприклад, при русі з постійними змінами напряму руху, що особливо характерно при необхідності швидкого переміщення по пересіченій місцевості, а так само в умовах проведення інтенсивних бойових операцій в населених пунктах. Перспективною областю використання багатокоординатного силового тренажера стрільця з комбінованими електромеханічними приводами, який запропоновано, є тренажерні механізми і комплекси, що використовувані для такої стрілецької підготовки бійців, яка повинна гарантувати вироблення у них стійких динамічних стереотипів вогневої поразки противника в сучасному бою при діях у складних фізико-географічних і кліматичних умовах. Відомі і досить часто використовуються у вітчизняній і зарубіжній практиці двокоординатні тренажери для кваліфікованої підготовки стрільців, серед яких, наприклад, тренажери згідно з патентами України № 91298 від 12.07.2010 р. "Двокоординатний електромеханічний тренажер стрільця" (Поповіченко О.В., Толстой О.В., Васильєв В.В., Грачов М.М., Ярмолюк В.М., Беліков В.Т.); № 98236 від 25.04.2012 р. "Модульний двокоординатний електромеханічний тренажер стрільця" (Хижняк О.А., Толстой О.В., Клименко В.М., Беліков В.Т., Грачов М.М., Васильєв В.В.) та ін. На жаль, ці тренажери забезпечують переміщення тренованого стрільця тільки в двокоординатній площині, в той же час не здатні дати йому такий рівень його м'язового навантаження, який був би максимально адекватний діям стрільця в складних умовах реальної бойової обстановки. Як прототип пропонованого багатокоординатного силового тренажера стрільця з комбінованими електромеханічними приводами прийнятий комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами згідно з патентом України № 103250 від 25.09.2013 р. (Фелько М.В., Гончарук А.А., Коваль А.А., Беликов В.Т., Ярмолюк В.М., Васильєв В.В.). Істотним недоліком прототипу є те, що хоча він і має значно великі функціональні можливості в порівнянні з відомими двокоординатними тренажерами, він так само, як і двокоординатні модульні тренажери стрільця, не здатний дати скелетно-м'язовому апарату тренованого стрільця таку м'язову напругу, щоб була адекватною його бойовому навантаженню. Завдання усунення вказаного вище істотного недоліку прототипу вирішено в багатокоординатному силовому тренажері стрільця з комбінованими електромеханічними приводами, що запропоновано, таким чином. Запропоновано виконати вказаний багатокоординатний силовий тренажер стрільця з комбінованими електромеханічними приводами з чотирьох складених функціональних блоківмодулів: 1. Основного рухливого транспортного блока-модуля у вигляді горизонтальної жорсткої кільцевої рами, на якій симетрично відносно вертикальної осі закріплені з можливістю обертання відносно власних вертикальних осей три або більше поворотних кронштейнів, кожен з яких несе опорне колесо вказаного вище рухливого транспортного елемента, у яке убудований широкорегульований приводний електричний двигун; 2. Двокоординатного функціонального блока-модуля, який являє собою кінематичне об'єднання двох пар взаємно перпендикулярних однокоординатних лінійних широкорегульованих електричних приводив з високою перевантажувальною здатністю, прямолінійні шляхові структури яких попарно паралельно встановлені уздовж кожної з чотирьох меж квадратної координатної площини, що обслуговується, при цьому симетрично розміщені один проти одного активні рухливі блоки-модулі координатних лінійних електричних двигунів жорстко закріплені на взаємно перпендикулярних напрямних координатних стрижнях, що знаходяться у паралельних площинах, причому двокоординатний функціональний блок-модуль забезпечений горизонтальною площадкою довільної форми, яку розміщено всередині квадратної координатної площини і яка несе дві пари опор кочення, у яких з можливістю вільного переміщення проходять напрямні координатні стрижні. 3. Блока-модуля бігової доріжки навантаження, основа якого жорстко або з можливістю повороту відносно його вертикальної осі закріплена встановлена на рухливій площадці двокоординатного блока модуля 2. 4. Нерухливого елемента – полігону у вигляді жорсткого або гнучкого металевого, композитного або комбінованого шляхового елемента, що має пласку або довільну конфігурацію. 1 UA 108055 C2 5 10 15 20 25 30 35 40 45 50 55 З метою підвищення функціональних можливостей тренажера, що запропоновано, кінцеві частини бічних елементів шляхової смуги переміщення рухливої частини тренажера необхідно забезпечити одним або більше підйомними механізмами, за допомогою яких можна регулювати радіус їх кривизни в статичному і динамічному режимах, що організовує переміщення тренованого стрільця в третьому координатному напрямі. Очевидно, що розміщення тренованого стрільця на працюючій біговій доріжці, яка закріплена на площадці, що у свою чергу відпрацьовує рух в двокоординатній площині, дозволяє реалізувати практично будь-який рівень фізичного навантаження скелетно-м'язового апарату стрільця, сприяючи значному зростанню його фізичної готовності до реальних умов бойової обстановки. Підвищення експлуатаційної надійності вказаного багатокоординатного силового тренажера стрільця з комбінованими електромеханічними приводами досягнуте завдяки установці на кожній кінцевій ділянці шляхової смуги одного або більше підйомних механізму регулювання радіусу кривизни гнучкої шляхової смуги. На кресленнях, що ілюструють конструктивну суть модульного електромеханічного двокоординатного тренажера стрільця з комбінованими електромеханічними приводами, що запропоновано, представлені: Фіг. 1. Монтажна схема шляхових структур двокоординатного функціонального блокамодуля, аксонометрична проекція. Фіг. 2. Двокоординатний функціональний блок-модуль у зборі з рухомими елементами лінійних двигунів, аксонометрична проекція. Фіг. 3. Бігова доріжка навантаження, вигляд збоку, зменшено. Фіг. 4. Бігова доріжка навантаження, аксонометрична проекція. Фіг. 5. Двокоординатний функціональний блок-модуль в повному зборі з біговою доріжкою навантаження. Фіг. 6. Кріплення площадки відробітку двокоординатного завдання, аксонометрична проекція, зменшене. Фіг. 7. Кріплення двокоординатного функціонального блока-модуля в повному зборі з біговою доріжкою навантаження в кільцевій рамі, вигляд зверху. Фіг. 8. Монтажна схема установки двокоординатного функціонального блока-модуля у зборі з площадкою відробітку двокоординатного завдання, аксонометрична проекція. Фіг. 9. Рухливий функціональний блок-модуль у комплекті з біговою доріжкою навантаження, вигляд збоку. Фіг. 10.Рухливий функціональний блок-модуль в комплекті з біговою доріжкою навантаження, опорні колеса повернені на кут α, вигляд збоку. Фіг. 11. Рухливий функціональний блок-модуль в комплекті з біговою доріжкою навантаження, вигляд спереду. Фіг. 12. Рухливий функціональний блок-модуль в комплекті з біговою доріжкою навантаження, опорні колеса повернені на кут α, вигляд спереду. Фіг. 13. Шляхова смуга з підйомниками кінцевих частин, вигляд збоку. Фіг. 14. Рухливий функціональний блок-модуль в комплекті з біговою доріжкою навантаження на шляховій смузі з одинарними підйомними механізмами, вигляд зверху. Фіг. 15. Рухливий функціональний блок-модуль в комплекті з біговою доріжкою навантаження на шляховій смузі з подвійними підйомними механізмами, вигляд зверху. Фіг. 16. Фази роботи рухливого функціонального блока-модуля з біговою доріжкою навантаження на шляховій смузі з двома підйомниками кінцевих частин, вигляд збоку. На фігурах 1 і 2 в аксонометричній проекції схематично представлений двокоординатний лінійний електричний двигун запропонованого багатокоординатного силового тренажера стрільця з комбінованими електромеханічними приводами. Цей двокоординатний електричний двигун виконаний в повній відповідності з отриманим нами раніше патентом України № 91298 від 12.07.2010 p., клас МПК(2009) F41A 33/00, F41G 3/26 (2006.01), F41G 3/30 (2006.01), F41G 5/00, А63В 24/00, Н02K 41/00, "Бюлетень" № 13 (автори Поповіченко О.В., Толстой О.В. Беліков В.Т., Васильєв В.В., Грачов М.М., Ярмолюк В.М.). Тут ідентичні феромагнітні магнітопроводи 1 і 2 шляхових структур координатних напрямів X і Y утворюють обслуговувану квадратну координатну площину 3. Пари рухомих координатних модулів 4 і 5, що відповідають феромагнітним магнітопроводам 1 і 2 шляхових структур X і Y, попарно об'єднані за допомогою напрямних координатних стрижнів 6 і 7, відповідно. На підшипникових вузлах 8 і 9 жорстко закріплена горизонтальна площадка 10, що відпрацьовує заданий системою управління рух у квадратній координатній площині 3. 2 UA 108055 C2 5 10 15 20 25 30 35 40 45 50 На фігурах 3 і 4 схематично у вигляді збоку (зменшено) і аксонометричній проекції представлена бігова доріжка навантаження 11, що закріплена на основі 12. Її рух забезпечує пара приводних електричних двигунів 13, закріплених в опорних вузлах 14. На фіг. 5 двокоординатний функціональний блок-модуль представлений в повному зборі з біговою доріжкою навантаження 11. На фіг. 6 в аксонометричній проекції в зменшеному вигляді показано кріплення площадки 10 відробітків двокоординатного завдання. На фігурах 7 і 8 показані у вигляді зверху і в аксонометричній проекції, відповідно, конструктивна схема кріплення двокоординатного функціонального блока-модуля в повному зборі з біговою доріжкою навантаження 11 в кільцевій рамі 15 і монтажна схема установки двокоординатного функціонального блока-модуля у зборі з площадкою 10 відробітків двокоординатного завдання. На кільцевій рамі 15 закріплені три пласкі поворотні торцеві електродвигуни 16, які приводять в обертання осі кронштейнів опорних коліс кільцевих рам 15. На фігурах 9, 10, 11 і 12 рухливий функціональний блок-модуль в комплекті з біговою доріжкою навантаження представлений у вигляді збоку і спереду при різних положеннях опорних коліс 17 відносно кільцевої рами 15. Наявність комплекту з трьох опорних коліс 17 завжди забезпечує стійке положення рами 15 з двокоординатним блоком-модулем, що несе бігову доріжку навантаження 11, на плоскій або дугоподібній поверхні нерухливого елемента тренажера. Як було вже вказано вище, поворот кронштейнів 18 з опорними колесами 17 робиться за допомогою пласких поворотних торцевих електродвигунів 16 повороту, жорстко закріплених на кільцевій рамі 15. На фігурі 13 у вигляді збоку представлена шляхова смуга нерухливого опорного елемента тренажера, який запропоновано, що складається з трьох елементів, - центрального, жорстко закріпленого плоского елемента 19 і двох бічних елементів 20, кінцеві частини яких прикріплені до ходових гвинтів 21, які приведені до обертання електродвигунами 22, корпуси яких встановлені з можливістю повороту на ходових гайках 23, що знаходяться на вертикальних гвинтових валах 24 торцевих електродвигунів 25 вертикального підйому. Останні прикріплені до горизонтальних балок 26 вертикальних стійок 27. На фігурах 14 і 15 у вигляді зверху показано розміщення в довільному положенні рухливого функціонального блока-модуля в комплекті з біговою доріжкою навантаження на шляхової смузі з одинарним і подвійним підйомними механізмами кінцевих частин 20, відповідно. На фіг. 16 у вигляді збоку дано орієнтовне уявлення про фази роботи рухливого функціонального блока-модуля з біговою доріжкою навантаження на шляховій смузі з двома підйомниками кожної з кінцевих шляхових смуг 20 (фіг. 15) впродовж всього тренувального циклу. Багатокоординатний силовий тренажер стрільця з комбінованими електромеханічними приводами, що запропоновано, працює таким чином. Перед початком тренування стрільця з бойовою стрілецькою зброєю на вказаному багатокоординатному силовому тренажері, останній самостійно або за допомогою допоміжного обслуговуючого персоналу має бути розміщений на робочому місці - біговій доріжці навантаження 11, що знаходиться на рухливому функціональному блоці-модулі, який перед початком тренування встановлений на постійно горизонтальній ділянці 19 складеного нерухомого функціонального блока-модуля тренажера. Інструктор-керівник тренувального процесу вводить у комп'ютер, що управляє роботою багатокоординатного силового тренажера стрільця з комбінованими електромеханічними приводами, програму тренувального процесу, встановлену для конкретного суб'єкта, що тренується, відповідно до рівня його бойової підготовки і фізіологічного стану організму. Після установки вказаної програми подається пусковий імпульс на систему управління комплексом електричних приводів тренажера. З моменту початку просторових переміщень стрілець, який рухається на біговій доріжці навантаження 11, останній починає виконання програми стрілецької підготовки, встановленої завданням. Після закінчення кожного тренувального сеансу, у разі потреби, має бути проведена відповідна переналадка систем управління багатокоординатного силового тренажера стрільця з комбінованими електромеханічними приводами з метою його підготовки для наступного суб'єкта силового тренувального процесу. 55 3 UA 108055 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 25 1. Багатокоординатний силовий тренажер стрільця з комбінованими електромеханічними приводами, що складається з двокоординатного функціонального блока-модуля, який являє собою кінематичне об'єднання двох пар взаємно перпендикулярних однокоординатних лінійних широкорегульованих електричних приводів з високою перевантажувальною здатністю, прямолінійні шляхові структури яких попарно паралельно встановлені уздовж кожної з чотирьох меж квадратної координатної площини, що обслуговується, при цьому симетрично розміщені один проти одного активні рухливі блоки-модулі координатних лінійних електричних двигунів жорстко закріплені на взаємно перпендикулярних напрямних координатних стрижнях, що знаходяться у паралельних площинах, причому двокоординатний функціональний блок-модуль забезпечений горизонтальною площадкою довільної форми, яку розміщено всередині квадратної координатної площини і несучої дві пари опор кочення, у яких з можливістю вільного переміщення проходять напрямні координатні стрижні, який відрізняється тим, що він містить основний рухомий транспортний елемент у вигляді горизонтальної жорсткої кільцевої рами, на якій симетрично відносно вертикальної осі закріплені з можливістю обертання відносно власних вертикальних осей три або більше кронштейнів, кожен з яких має змогу повороту навкруги вертикальної осі з допомогою плаского поворотного торцевого електродвигуна і несе опорне колесо вказаного рухомого транспортного елемента, у ободі якого убудований широкорегульований приводний тяговий електричний двигун, причому на кільцевій рамі встановлений двокоординатний функціональний блок-модуль, на рухомій координатній площині якого жорстко або з можливістю повороту відносно її вертикальної осі закріплена основа бігової доріжки навантаження, та нерухомого елемента - полігону у вигляді жорсткого або гнучкого металевого, композитного або комбінованого шляхового елемента, що має пласку або довільну конфігурацію. 2. Багатокоординатний силовий тренажер стрільця з комбінованими електромеханічними приводами за п. 1, який відрізняється тим, що кінцеві частини бічних елементів пласкої шляхової смуги переміщення рухливої частини тренажера забезпечені одним або більше підйомними механізмами регулювання радіуса їх кривизни. 4 UA 108055 C2 5 UA 108055 C2 6 UA 108055 C2 7 UA 108055 C2 8 UA 108055 C2 9 UA 108055 C2 10 UA 108055 C2 11 UA 108055 C2 Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 12
ДивитисяДодаткова інформація
Автори англійськоюFelko Mykola Viacheslavovych, Yahlinskyi Viktor Petrovych, Kravchuk Oleh Ivanovych, Belikov Viktor Tryfonovych
Автори російськоюФелько Николай Вячеславович, Яглинский Виктор Петрович, Кравчук Олег Иванович, Беликов Виктор Трифонович
МПК / Мітки
МПК: F41G 5/00, H02K 41/00, F41G 3/26, A63B 24/00, F41A 33/00, F41G 3/30, H02K 41/035
Мітки: комбінованими, приводами, стрільця, багатокоординатний, силовий, електромеханічними, тренажер
Код посилання
<a href="https://ua.patents.su/14-108055-bagatokoordinatnijj-silovijj-trenazher-strilcya-z-kombinovanimi-elektromekhanichnimi-privodami.html" target="_blank" rel="follow" title="База патентів України">Багатокоординатний силовий тренажер стрільця з комбінованими електромеханічними приводами</a>
Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами
Номер патенту: 103250
Опубліковано: 25.09.2013
Автори: Ярмолюк Вадим Михайлович, Гончарук Антон Антонович, Васильєв Валерій Валентинович, Фелько Микола В'ячеславович, Коваль Андрій Андрійович, Беліков Віктор Тріфонович
МПК: F41A 33/00, H02K 41/00, A63B 24/00, F41G 5/00, F41G 3/26
Мітки: приводами, техніки, електромеханічними, тренажер, операторів, модульними, транспортної, військової, багатокоординатний, комбінований
Формула / Реферат:
1. Комбінований багатокоординатний тренажер операторів військової транспортної техніки з модульними електромеханічними приводами, що складається з двокоординатного функціонального блока-модуля з паралельним кінематичним механізмом гексаподного типу, що має шість ступенів свободи, при якому нижня основа має жорсткий механічний зв'язок з центральним рухомим елементом двокоординатного електромеханічного приводу, робоче місце тренованого...
Модульний двокоординатний електромеханічний тренажер стрільця

Номер патенту: 98236
Опубліковано: 25.04.2012
Автори: Беліков Віктор Тріфонович, Толстой Олексій Володимирович, Васильєв Валерій Валентинович, Клименко Вадим Миколайович, Хижняк Олексій Андрійович, Грачьов Микола Миколайович
МПК: A63B 24/00, F41G 3/30, H02K 41/00, F41G 5/00, F41A 33/00, F41G 3/26
Мітки: тренажер, двокоординатний, електромеханічний, стрільця, модульний
Формула / Реферат:
1. Модульний двокоординатний електромеханічний тренажер стрільця, що містить двокоординатний функціональний блок-модуль з двох взаємно перпендикулярних лінійних широкорегульованих електричних приводів, форсованих з високою перевантажувальною здатністю, прямолінійні путьові структури яких попарно паралельно встановлені уздовж кожної з чотирьох меж обслуговуваної прямокутної координатної площини, а симетрично розміщені один проти одного...
Двокоординатний електромеханічний тренажер стрільця

Номер патенту: 91298
Опубліковано: 12.07.2010
Автори: Поповіченко Олександр Вікторович, Грачьов Микола Миколайович, Толстой Олексій Володимирович, Беліков Віктор Тріфонович, Васильєв Валерій Валентинович, Ярмолюк Вадим Михайлович
МПК: A63B 24/00, H02K 41/00, F41G 3/26, F41A 33/00, F41G 3/30, F41G 5/00
Мітки: стрільця, двокоординатний, тренажер, електромеханічний
Формула / Реферат:
1. Двокоординатний електромеханічний тренажер стрільця, що складається з двох координатних приводів, виконаних на базі широкорегульованих лінійних електричних двигунів, що форсуються з високою перевантажувальною здатністю, путні прямолінійні структури яких попарно паралельно встановлені уздовж кожної з чотирьох меж обслуговуваної прямокутної координатної площини, який відрізняється тим, що симетрично розміщені один проти одного активні...
Силовий тренажер

Номер патенту: 9949
Опубліковано: 17.10.2005
Автор: Барабаш Валентин Радіонович
МПК: A63B 21/06, A63B 21/00
Формула / Реферат:
Силовий тренажер містить два незалежних робочих пристрої, корпус, виготовлений як модель "стілець", який відрізняється тим, що має робочий важіль, закріплений шарнірно на розбірній рамі під кутом 40°, яка фіксується на корпусі, з можливістю прямолінійного руху в прямому і зворотному напрямках, з можливістю розтягування гумових кілець з камери легкового автомобіля, закріплених на пальцях робочого важеля і рами.
Силовий тренажер
Номер патенту: 1040
Опубліковано: 17.09.2001
Автор: Барабаш Валентин Радіонович
МПК: A63B 21/02, A63B 21/06
Формула / Реферат:
Силовий тренажер, який містить імітатор грифа, робочі троси з відводами, корпус, який відрізняється тим, що корпус має два незалежні механічні пристрої, кожен з яких складається з двоступеневого редуктора, виготовленого з шківів різних діаметрів при співвідношенні 1:8 з можливістю обертання як у прямому, так і у зворотньому напрямках, та закріпленого одним кінцем робочого троса, попередньо накрученого на 4-5 витків через направляючий ролик і...
Попередній патент: Очисник головок коренеплодів
Наступний патент: Спосіб контролю густини феромагнітних суспензій
Випадковий патент: Спосіб наплавлення виробів із важкозварювальних сталей