Шарнірно-важільний точний прямолінійно-напрямний механізм в.п. сабліна
Формула / Реферат
1. Шарнірно-важільний точний прямолінійно-напрямний механізм, що містить підставу й кінематичний ланцюг, який складається з рухомих ланок у вигляді важелів, утворюючих між собою й з підставою обертальні кінематичні пари, який відрізняється тим, що його кінематичний ланцюг містить щонайменше дві структурні групи ланок, кожна з яких містить щонайменше дві рухомі ланки, які утворюють між собою щонайменше одну обертальну кінематичну пару першого роду й щонайменше одну зовнішню обертальну кінематичну пару першого роду з підставою, причому осі обертання зазначених обертальних кінематичних пар паралельні між собою, при цьому осі обертання обертальних кінематичних пар першого роду щонайменше двох структурних груп ланок розташовані під кутом одна до одної, а щонайменше два важелі щонайменше двох структурних груп ланок зв'язані між собою щонайменше безпосередньо й принаймні безпосередньо й через групу проміжних ланок.
2. Механізм за п. 1, який відрізняється тим, що безпосередній зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок виконано у вигляді дворухомого сферичного шарніра з пальцем на одній сферичній поверхні й круговим пазом на іншій сферичній поверхні.
3. Механізм за п. 1, який відрізняється тим, що безпосередній зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок виконано у вигляді трирухомого сферичного шарніра.
4. Механізм за п. 1, який відрізняється тим, що зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок із проміжною ланкою виконано у вигляді дворухомого кінематичного з'єднання, наприклад шарніра Гука.
Текст
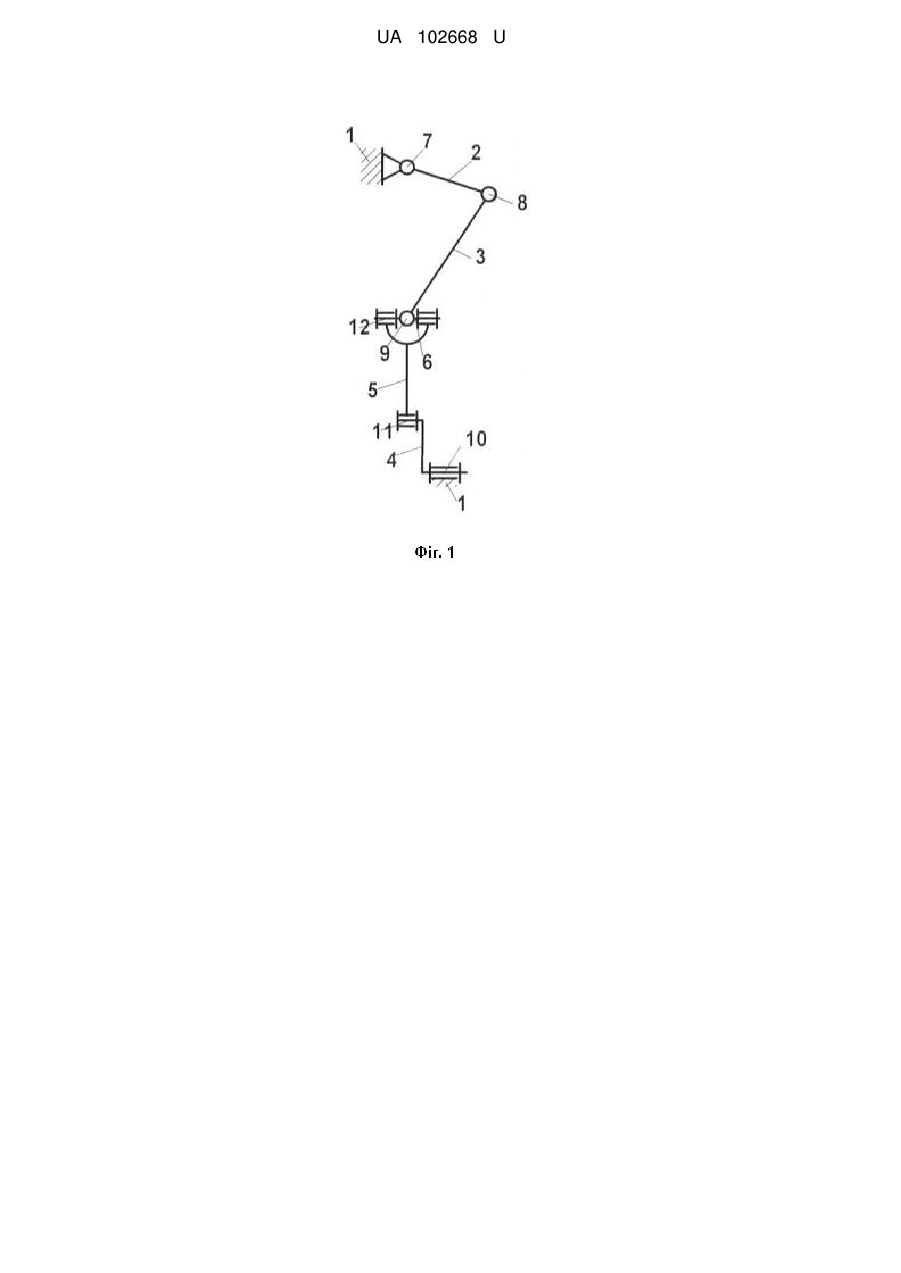
Реферат: UA 102668 U UA 102668 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до машинобудування, а саме до пристроїв для перетворення обертового руху провідної ланки в прямолінійний зворотно-поступальний рух хоча б однієї крапки відомої ланки. Відомі шарнірно-важільні прямолінійно-напрямні механізми, що містять підставу й кінематичний ланцюг, який складається з рухомих ланок у вигляді важелів, утворюючих між собою й з підставою обертальні кінематичні пари (Див. Аартоболевскій І.І. Механізми в сучасній техніці". – М.: Наука, 1970 р. - Т. 1. - стор. 389-455, мал. 644-730.). Недоліком відомих чотириланкових шарнірно-важільних прямолінійно-напрямних механізмів є неможливість забезпечення точної прямолінійної траєкторії хоча б однієї крапки провідної ланки. Недоліком відомих щонайменше восьмиланкових шарнірно-важільних прямолінійнонапрямних механізмів, які забезпечують точну прямолінійну траєкторію хоча б однієї крапки відомою ланки, є складність їх конструкції. В основу корисної моделі поставлена задача створити такий шарнірно-важільний точний прямолінійно-напрямний механізм, у якому його кінематичний ланцюг містить щонайменше дві структурні групи ланок, кожна з яких містить щонайменше дві рухомі ланки, які утворюють між собою щонайменше одну обертальну кінематичну пару першого роду й щонайменше одну зовнішню обертальну кінематичну пару першого роду з підставою, причому осі обертання зазначених обертальних кінематичних пар паралельні між собою, при цьому осі обертання обертальних кінематичних пар першого роду щонайменше двох структурних груп розташовані під кутом одна до одної, а щонайменше два важелі щонайменше двох структурних груп ланок зв'язані між собою щонайменше безпосередньо й принаймні безпосередньо й через групу проміжних ланок. В основу корисної моделі, як варіант, поставлена задача створити такий шарнірноважільний точний прямолінійно-напрямний механізм, у якому безпосередній зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок виконано у вигляді дворухомого сферичного шарніра з пальцем на одній сферичній поверхні й круговим пазом на іншій сферичній поверхні. В основу корисної моделі, як варіант, поставлена задача створити такий шарнірноважільний точний прямолінійно-напрямний механізм, у якому безпосередній зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок виконано у вигляді трирухомого сферичного шарніра. В основу корисної моделі, як варіант, поставлена задача створити такий шарнірноважільний точний прямолінійно-напрямний механізм, у якому зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок через проміжну ланку виконано у вигляді двошарнірного з'єднання із проміжною ланкою, наприклад у вигляді шарніра Гука. Поставлена задача вирішується в шарнірно-важільному точному прямолінійно-напрямному механізмі, що містить підставу й кінематичний ланцюг, який складається з рухомих ланок у вигляді важелів, утворюючих між собою й з підставою обертальні кінематичні пари, причому його кінематичний ланцюг містить щонайменше дві структурні групи ланок, кожна з яких містить щонайменше дві рухомі ланки, які утворюють між собою щонайменше одну обертальну кінематичну пару першого роду й щонайменше одну зовнішню обертальну кінематичну пару першого роду з підставою, причому осі обертання зазначених обертальних кінематичних пар паралельні між собою, при цьому осі обертання обертальних кінематичних пар першого роду щонайменше двох структурних груп ланок розташовані під кутом одна до одної, а щонайменше два важелі щонайменше двох структурних груп ланок зв'язані між собою щонайменше безпосередньо й принаймні безпосередньо й через групу проміжних ланок. Як варіант, безпосередній зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок може бути виконано у вигляді дворухомого сферичного шарніра з пальцем на одній сферичній поверхні й круговим пазом на іншій сферичній поверхні. Як варіант, безпосередній зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок може бути виконано у вигляді трирухомого сферичного шарніра. Як варіант, зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок через проміжну ланку може бути виконано у вигляді двошарнірного з'єднання із проміжною ланкою, наприклад у вигляді шарніра Гука. На кресленнях зображені деякі з можливих варіантів виконання пропонованого шарнірноважільного точного прямолінійно-напрямного механізму. На Фіг. 1 схематично показаний пропонований шарнірно-важільний точний прямолінійнонапрямний механізм, кінематичний ланцюг якого містить дві найпростіші структурні групи ланок, кожна з яких містить по дві рухомі ланки, і якщо зв'язок між двома важелями двох структурних груп ланок через проміжну ланку виконано у вигляді двошарнірного з'єднання із проміжною 1 UA 102668 U 5 10 15 20 25 30 35 40 45 50 55 60 ланкою, наприклад у вигляді шарніра Гука; на Фіг. 2 - те ж, якщо безпосередній зв'язок між двома важелями двох структурних груп ланок виконано у вигляді дворухомого сферичного шарніра; на Фіг. 3 - те ж, якщо безпосередній зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок виконано у вигляді трирухомого сферичного шарніра; на Фіг. 4-17 те ж, з більш складною структурою. Шарнірно-важільний точний прямолінійно-напрямний механізм (Фіг. 1) містить підставу 1 і кінематичний ланцюг механізму, який складається із двох структурних груп ланок, одна з яких містить два рухомі важелі 2 і 3, а друга містить два рухомі важелі 4 і 5, при цьому важелі 3 і 5 зв'язані між собою через проміжну ланку 6 у вигляді хрестовини. Ланка 2 утворює з підставою 1 обертальну кінематичну пару першого роду 7, а з ланкою 3 утворює обертальну кінематичну пару першого роду 8. Ланка 3, у свою чергу, утворює обертальну кінематичну пару першого роду 9 із хрестовиною 6. При цьому осі обертання обертальних кінематичних пар першого роду 7, 8 і 9 паралельні між собою. Ланка 4 утворює з підставою 1 обертальну кінематичну пару першого роду 10, а з ланкою 5 утворює обертальну кінематичну пару першого роду 11. Ланка 5, у свою чергу, утворює обертальну кінематичну пару першого роду 12 із хрестовиною 6. При цьому осі обертання обертальних кінематичних пар першого роду 10, 11 і 12 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першою роду 7, 8 і 9. Шарнірно-важільний точний прямолінійно-напрямний механізм (Фіг. 2) містить підставу 13 і кінематичний ланцюг механізму, який складається із двох структурних груп ланок, одна з яких містить два рухомі важелі 14 і 15, а друга містить два рухомі важелі 16 і 17, при цьому важелі 15 і 17 зв'язані між собою безпосередньо. Ланка 14 утворює з підставою 13 обертальну кінематичну пару першого роду 18, а з ланкою 15 утворює обертальну кінематичну пару першого роду 19. При цьому осі обертання обертальних кінематичних пар першого роду 18 і 19 паралельні між собою. Ланка 16 утворює з підставою 13 обертальну кінематичну пару першого роду 20, а з ланкою 17 утворює обертальну кінематичну пару першого роду 21. При цьому осі обертання обертальних кінематичних пар першого роду 20 і 21 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 18 і 19. Безпосередній зв'язок між ланками 15 і 17 виконано у вигляді дворухомого сферичного шарніра 22 з пальцем на одній сферичній поверхні й круговим пазом на іншій сферичній поверхні. Шарнірно-важільний точний прямолінійно-напрямний механізм (Фіг. 3) містить підставу 23 і кінематичний ланцюг механізму, який складається із двох структурних трун ланок, одна з яких містить два рухомі важелі 24 і 25, а друга містить два рухомі важелі 26 і 27, при цьому важелі 25 і 27 зв'язані між собою безпосередньо. Ланка 24 утворює з підставою 23 обертальну кінематичну пару першого роду 28, a з ланкою 25 утворює обертальну кінематичну пару першого роду 29. При цьому осі обертання обертальних кінематичних пар першого роду 28 і 29 паралельні між собою. Ланка 26 утворює з підставою 23 обертальну кінематичну пару першого роду 30, а з ланкою 27 утворює обертальну кінематичну пару першого роду 31. При цьому осі обертання обертальних кінематичних пар першого роду 30 і 31 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 28 і 29. Безпосередній зв'язок між ланками 25 і 27 виконано у вигляді трирухомого сферичного шарніра 32. Шарнірно-важільний точний прямолінійно-напрямний механізм (Фіг. 4) містить підставу 33 і кінематичний ланцюг механізму, який складається із трьох структурних груп ланок, одна з яких містить два рухомі важелі 34 і 35, друга містить два рухомі важелі 36 і 37, а третя містить два рухомі важелі 38 і 39, при цьому важелі 35, 37 і 39 зв'язані між собою через проміжну ланку 40 у вигляді хрестовини. Ланки 34 і 36 утворюють із підставою 33 подвійну обертальну кінематичну пару першого роду 41, ланка 34 з ланкою 35 утворює обертальну кінематичну пару першого роду 42. Ланка 36 утворює обертальну кінематичну пару першого роду 43 з ланкою 37. Ланки 35 і 37, у свою чергу, утворюють подвійну обертальну кінематичну пару першого роду 44 із хрестовиною 40. При цьому осі обертання обертальних кінематичних пар першого роду 41-44 паралельні між собою. Ланка 38 утворює з підставою 33 обертальну кінематичну пару першого роду 45, а з ланкою 39 утворює обертальну кінематичну пару першого роду 46. Ланка 39, у свою чергу, утворює обертальну кінематичну пару першого роду 47 із хрестовиною 40. При цьому осі обертання обертальних кінематичних пар першого роду 45, 46 і 47 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 41-44. Осі обертання обертальних кінематичних пар першого роду 41-44 утворюють ромб. Шарнірно-важільний точний прямолінійно-напрямний механізм (Фіг. 5) містить підставу 48 і кінематичний ланцюг механізму, який складається із трьох структурних груп ланок, одна з яких містить два рухомі важелі 49 і 50, друга містить два рухомі важелі 51 і 52, а третя містить два рухомі важелі 53 і 54, при цьому важелі 50 і 54 зв'язані між собою через проміжну ланку 55 у 2 UA 102668 U 5 10 15 20 25 30 35 40 45 50 55 вигляді хрестовини. Ланки 49 і 51 утворюють із підставою 48 подвійну обертальну кінематичну пару першого роду 56, ланка 49 з ланкою 50 утворює обертальну кінематичну пару першого роду 57. Ланка 51 утворює обертальну кінематичну пару першого роду 58 з ланкою 52. Ланки 50 і 52, у свою чергу, утворюють між собою обертальну кінематичну пару першого роду 59. Ланка 50 утворює обертальну кінематичну пару першого роду 60 із хрестовиною 55. При цьому осі обертання обертальних кінематичних пар першого роду 56-60 паралельні між собою. Ланка 53 утворює з підставою 48 обертальну кінематичну пару першого роду 61, а з ланкою 54 утворює обертальну кінематичну пару першого роду 62. Ланка 54, у свою чергу, утворює обертальну кінематичну пару першого роду 63 із хрестовиною 55. При цьому осі обертання обертальних кінематичних пар першого роду 61, 62 і 63 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 56-60. Осі обертання обертальних кінематичних пар першого роду 56-59 утворюють ромбоїд. Шарнірно-важільний точний прямолінійно-напрямний механізм (Фіг. 6) містить підставу 64 і кінематичний ланцюг механізму, який складається із трьох структурних груп ланок, одна з яких містить два рухомі важелі 65 і 66, друга містить два рухомі важелі 67 і 68, а третя містить два рухомі важелі 69 і 70, при цьому важелі 66, 68 і 70 зв'язані між собою через проміжну ланку 71 у вигляді хрестовини. Ланки 65 і 67 утворюють із підставою 64 подвійну обертальну кінематичну пару першого роду 72, ланка 65 з ланкою 66 утворює обертальну кінематичну пару першого роду 73. Ланка 67 утворює обертальну кінематичну пару першого роду 74 з ланкою 68. Ланки 66 і 68, у свою чергу, утворюють подвійну обертальну кінематичну пару першого роду 75 із хрестовиною 71. При цьому осі обертання обертальних кінематичних пар першого роду 72-75 паралельні між собою. Ланка 69 утворює з підставою 64 обертальну кінематичну пару першого роду 76, а з ланкою 70 утворює обертальну кінематичну пару першою роду 77. Ланка 70, у свою чергу, утворює обертальну кінематичну пару першого роду 78 із хрестовиною 71. При цьому осі обертання обертальних кінематичних пар першого роду 76, 77 і 78 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 72-75. Осі обертання обертальних кінематичних пар першого роду 72-75 утворюють різносторонній чотирикутник. Шарнірно-важільний точний прямолінійно-напрямний механізм (Фіг. 7) містить підставу 79 і кінематичний ланцюг механізму, який складається із трьох структурних груп ланок, одна з яких містить два рухомі важелі 80 і 81, друга містить два рухомі важелі 82 і 83, а третя містить два рухомі важелі 84 і 85, при цьому важелі 81, 83 і 85 зв'язані між собою через проміжну ланку 86 у вигляді хрестовини. Ланки 80 і 82 утворюють із підставою 79 подвійну обертальну кінематичну пару першого роду 87, ланка 80 з ланкою 81 утворює обертальну кінематичну пару першого роду 88. Ланка 82 утворює обертальну кінематичну пару першого роду 89 з ланкою 83. Ланки 81 і 83, у свою чергу, утворюють подвійну обертальну кінематичну пару першого роду 90 із хрестовиною 86. При цьому осі обертання обертальних кінематичних пар першого роду 87-90 паралельні між собою. Ланка 84 утворює з підставою 79 обертальну кінематичну пару першого роду 91, а з ланкою 85 утворює обертальну кінематичну пару першого роду 92. Ланка 85 у свою чергу утворює обертальну кінематичну пару першого роду 93 із хрестовиною 86. При цьому осі обертання обертальних кінематичних пар першого роду 91, 92 і 93 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 87-90. Осі обертання обертальних кінематичних пар першого роду 87-90 утворюють паралелограм. Шарнірно-важільний точний прямолінійно-напрямний механізм (Фіг. 8) містить підставу 94 і кінематичний ланцюг механізму, який складається із двох структурних груп ланок, одна з яких містить чотири рухомі важелі 95-98, а друга містить два рухомі важелі 99 і 100, при цьому важелі 98 і 100 зв'язані між собою через проміжну ланку 101 у вигляді хрестовини. Ланка 95 утворює з підставою 94 обертальну кінематичну пару першого роду 102, з ланкою 96 утворює обертальну кінематичну пару першого роду 103, яка у свою чергу утворює обертальну кінематичну пару першого роду 104 з ланкою 98. Ланка 97 утворює обертальну кінематичну пару першого роду 105 з ланкою 95 і обертальну кінематичну пару першого роду 106 з ланкою 98, яка у свою чергу утворює обертальну кінематичну пару першого роду 107 із хрестовиною 101. При цьому осі обертання обертальних кінематичних пар першого роду 102-107 паралельні між собою. Ланка 99 утворює з підставою 94 обертальну кінематичну пару першого роду 108, а з ланкою 100 утворює обертальну кінематичну пару першого роду 109. Ланка 100, у свою чергу, утворює обертальну кінематичну пару першого роду 110 із хрестовиною 101. При цьому осі обертання обертальних кінематичних пар першого роду 108-110 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 102-107. Осі обертання обертальних кінематичних пар першого роду 103-106 утворюють ромб. 3 UA 102668 U 5 10 15 20 25 30 35 40 45 50 55 60 Шарнірно-важільний точний прямолінійно-напрямний механізм (Фіг. 9) містить підставу 11 1 і кінематичний ланцюг механізму, який складається із трьох структурних груп ланок, одна з яких містить два рухомі важелі 112 і 113, друга містить два рухомі важелі 114 і 115, а третя містить два рухомі важелі 116 і 117, при цьому важелі 114 і 117 зв'язані між собою через проміжну ланку 118 у вигляді хрестовини. Ланка 112 утворює з підставою 111 обертальну кінематичну пару першого роду 119, ланка 112 з ланкою 113 утворює обертальну кінематичну пару першого роду 120. Ланка 113 утворює обертальну кінематичну пару першого роду 121 з ланкою 115. Ланка 114, у свою чергу, утворює обертальну кінематичну пару першого роду 122 з ланкою 112, обертальну кінематичну пару першого роду 123 з ланкою 115 і обертальну кінематичну пару першого роду 124 із хрестовиною 118. При цьому осі обертання обертальних кінематичних пар першого роду 119-124 паралельні між собою. Ланка 116 утворює з підставою 111 обертальну кінематичну пару першого роду 125, а з ланкою 1 17 утворює обертальну кінематичну пару першого роду 126. Ланка 117, у свою чергу, утворює обертальну кінематичну пару першого роду 127 із хрестовиною 118. При цьому осі обертання обертальних кінематичних пар першого роду 125-127 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 119-124. Осі обертання обертальних кінематичних пар першого роду 120-123 утворюють ромб. Шарнірно-важільний точний прямолінійно-напрямний механізм (Фіг. 10) містить підставу 128 і кінематичний ланцюг механізму, який складається із чотирьох структурних груп ланок, одна з яких містить два рухомі важелі 129 і 1 30, друга містить два рухомі важелі 131 і 132, третя містить два рухомі важелі 133 і 134, а четверта містить два рухомі важелі 135 і 136, при цьому важелі 133, 134 і 136 зв'язані між собою через проміжну ланку 137 у вигляді хрестовини. Ланки 129 і 130 утворюють із підставою 128 подвійну обертальну кінематичну пару першого роду 138, ланка 129 з ланкою 131 утворює обертальну кінематичну пару першого роду 139. Ланка 130 утворює обертальну кінематичну пару першого роду 140 з ланкою 132. Ланка 132, у свою чергу, утворюють обертальну кінематичну пару першого роду 141 з ланкою 131, а також обертальну кінематичну пару першого роду 142 з ланкою 133. Ланка 134 утворює обертальну кінематичну пару першого роду 143 з ланкою 131. Ланки 133 і 134 утворюють між собою й із хрестовиною 137 подвійну обертальну кінематичну пару першого роду 144. При цьому осі обертання обертальних кінематичних пар першого роду 138-144 паралельні між собою. Ланка 135 утворює з підставою 128 обертальну кінематичну пару першого роду 145, а з ланкою 136 утворює обертальну кінематичну пару першого роду 146. Ланка 136, у свою чергу, утворює обертальну кінематичну пару першого роду 147 із хрестовиною 137. При цьому осі обертання обертальних кінематичних пар першого роду 145-147 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 138-144. Осі обертання обертальних кінематичних пар першого роду 138-144 утворюють два ромби. Шарнірно-важільний точний прямолінійно-напрямний механізм (Фіг. 11) містить підставу 148 і кінематичний ланцюг механізму, який складається із чотирьох структурних груп ланок, одна з яких містить два рухомі важелі 149 і 150, друга містить два рухомі важелі 151 і 152, третя містить два рухомі важелі 153 і 154, а четверта містить два рухомі важелі 155 і 156, при цьому важелі 153, 154 і 156 зв'язані між собою через проміжну ланку 157 у вигляді хрестовини. Ланки 149 і 150 утворюють обертальну кінематичну пару першого роду 158, ланка 149 з ланкою 152 утворює обертальну кінематичну пару першого роду 159. Ланка 150 утворює обертальну кінематичну пару першого роду 160 з ланкою 151. Ланки 151 і 152, у свою чергу, утворюють подвійну обертальну кінематичну пару першого роду 161 з підставою 148, а також ланка 152 утворює обертальну кінематичну пару першого роду 162 з ланкою 153. Ланка 154 утворює обертальну кінематичну пару першого роду 163 з ланкою 151. Ланки 153 і 154 утворюють між собою й із хрестовиною 157 подвійну обертальну кінематичну пару першого роду 164. При цьому осі обертання обертальних кінематичних пар першого роду 158-164 паралельні між собою. Ланка 155 утворює з підставою 148 обертальну кінематичну пару першого роду 165, а з ланкою 156 утворює обертальну кінематичну пару першого роду 166. Ланка 156, у свою чергу, утворює обертальну кінематичну пару першого роду 167 із хрестовиною 157. При цьому осі обертання обертальних кінематичних пар першого роду 165-167 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 158-164. Осі обертання обертальних кінематичних пар першого роду 158-164 утворюють два ромби. Шарнірно-важільний точний прямолінійно-напрямний механізм (Фіг. 12) містить підставу 168 і кінематичний ланцюг механізму, який складається iз чотирьох структурних груп ланок, одна і яких містить два рухомі важелі 169 і 170, друга містить два рухомі важелі 171 і 172, третя містить два рухомі важелі 173 і 174, а четверта містить два рухомі важелі 175 і 176, при цьому важелі 173, 174 і 176 зв'язані між собою через проміжну ланку 177 у вигляді хрестовини. Ланки 4 UA 102668 U 5 10 15 20 25 30 35 40 45 50 55 60 169 і 170 утворюють обертальну кінематичну пару першого роду 178, ланка 169 з ланкою 171 утворює обертальну кінематичну пару першого роду 179. Ланка 170 утворює обертальну кінематичну пару першого роду 180 з ланкою 172. Ланки 171 і 172, у свою чергу, утворюють обертальну кінематичну пару першого роду 181, а також ланка 171 утворює обертальну кінематичну пару першого роду 182 з ланкою 173. Ланка 174 утворює обертальну кінематичну пару першого роду 183 з ланкою 172. Ланки 173 і 174 утворюють між собою й із хрестовиною 177 подвійну обертальну кінематичну пару першого роду 184. При цьому осі обертання обертальних кінематичних пар першого роду 178-184 паралельні між собою. Ланка 175 утворює з підставою 168 обертальну кінематичну пару першого роду 185, а з ланкою 176 утворює обертальну кінематичну пару першого роду 186. Ланка 176, у свою чергу, утворює обертальну кінематичну пару першого роду 187 із хрестовиною 177. При цьому осі обертання обертальних кінематичних пар першого роду 185-187 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 178-184. Осі обертання обертальних кінематичних пар першого роду 178-184 утворюють два ромби. Шарнірно-важільний точний прямолінійно-напрямний механізм (Фіг. 13) містить підставу 188 і кінематичний ланцюг механізму, який складається із трьох структурних груп ланок, одна з яких містить два рухомі важелі 189 і 190, друга містить два рухомі важелі 191 і 192, а третя група виконана просторовою й містить кривошип 193, а також два рухомі важелі 194 і 195, при цьому важелі 189 і 194, а також важелі 190 і 195 зв'язані між собою безпосередньо. Ланка 189 утворює з підставою 188 обертальну кінематичну пару першого роду 196, ланка 191 утворює з підставою 188 обертальну кінематичну пару першого роду 197. Ланка 189 утворює обертальну кінематичну пару першого роду 198 з ланкою 190. Ланка 192 у свою чергу утворює обертальну кінематичну пару першого роду 199 з ланкою 191 і обертальну кінематичну пару першого роду 200 з ланкою 190. При цьому осі обертання обертальних кінематичних пар першого роду 196200 паралельні між собою. Ланка 193 утворює з підставою 188 обертальну кінематичну пару першого роду 201, а з ланками 194 і 195 утворює трирухомі сферичні шарніри 202 і 203. Ланка 194 утворює з ланкою 189 трирухомий сферичний шарнір 204, а ланка 195 утворює з ланкою 191 трирухомий сферичний шарнір 205. При цьому вісь обертання обертальної кінематичної пари першого роду 201 перпендикулярна осям обертання обертальних кінематичних пар першого роду 196-200. Осі обертання обертальних кінематичних пар першого роду 196-200 утворюють симетричний п'ятикутник. Довжини ланок 194 і 195 рівні між собою й розташовані симетрично осі симетрії п'ятикутника. Шарнірно-важільний точний прямолінійно-напрямний механізм (Фіг. 14) містить підставу 206 і кінематичний ланцюг механізму, який складається із трьох структурних груп ланок, одна з яких містить два рухомі важелі 207 і 208, друга містить два рухомі важелі 209 і 210, а третя група виконана просторовою й містить кривошип 211, а також два рухомі важелі 212 і 213, при цьому важелі 207 і 212, а також важелі 208 і 213 зв'язані між собою безпосередньо. Ланки 207 і 208 утворюють із підставою 206 подвійну обертальну кінематичну пару першого роду 214. Ланка 207 утворює обертальну кінематичну пару першого роду 215 з ланкою 209. Ланка 210, у свою чергу, утворює обертальну кінематичну пару першого роду 216 з ланкою 208 і обертальну кінематичну пару першого роду 217 з ланкою 209. При цьому осі обертання обертальних кінематичних пар першого роду 214-217 паралельні між собою. Ланка 211 утворює з підставою 206 обертальну кінематичну пару першого роду 218, а з ланками 212 і 213 утворює трирухомі сферичні шарніри 219 і 220. Ланка 212 утворює з ланкою 207 трирухомий сферичний шарнір 221, а ланка 213 утворює з ланкою 208 трирухомий сферичний шарнір 222. При цьому вісь обертання обертальної кінематичної пари першого роду 218 перпендикулярна осям обертання обертальних кінематичних пар першого роду 214-217. Осі обертання обертальних кінематичних пар першого роду 214-217 утворюють ромб. Довжини ланок 212 і 213 рівні між собою й розташовані симетрично осі симетрії ромба, минаючої через осі обертання обертальних кінематичних пар першого роду 214 і 217. Шарнірно-важільний точний прямолінійно-напрямний механізм (Фіг. 15) містить підставу 223 і кінематичний ланцюг механізму, який складається із трьох структурних груп ланок, одна з яких містить два рухомі важелі 224 і 225, друга містить два рухомі важелі 226 і 227, а третя містить два рухомі важелі 228 і 229, при цьому важелі 50 і 54 зв'язані між собою через протяжну проміжну ланку 230. Ланка 224 утворює з підставою 223 обертальну кінематичну пару першого роду 231, а ланка 226 утворює з підставою 223 обертальну кінематичну пару першого роду 232. Ланка 224 з ланкою 225 утворює обертальну кінематичну пару першого роду 233. Ланка 226 утворює обертальну кінематичну пару першого роду 234 з ланкою 227. Ланка 226 утворює обертальну кінематичну пару першого роду 235 із проміжною ланкою 230, а ланка 227 утворює обертальну кінематичну пару першого роду 236 із проміжною ланкою 230. При цьому осі 5 UA 102668 U 5 10 15 20 25 30 35 40 45 50 55 60 обертання обертальних кінематичних пар першого роду 231-236 паралельні між собою. Ланка 228 утворює з підставою 223 обертальну кінематичну пару першого роду 237, а з ланкою 229 утворює обертальну кінематичну пару першого роду 238. Ланка 229, у свою чергу, утворює обертальну кінематичну пару першого роду 239 із проміжною ланкою 230. При цьому осі обертання обертальних кінематичних пар першого роду 237-239 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першою роду 231-236. Шарнірно-важільний точний прямолінійно-напрямний механізм (Фіг. 16) містить підставу 240 і кінематичний ланцюг механізму, який складається із чотирьох структурних груп ланок, одна з яких містить два рухомі важелі 241 і 242, друга містить два рухомі важелі 243 і 244, третя містить два рухомі важелі 245 і 246, а четверта містить два рухомі важелі 247 і 248, при цьому важелі 242, 244, 246 і 248 зв'язані між собою через довільну проміжну ланку 249. Ланка 241 утворює з підставою 240 обертальну кінематичну пару першого роду 250, ланка 243 утворює з підставою 240 обертальну кінематичну пару першого роду 253, а ланка 245 утворює з підставою 240 обертальну кінематичну пару першого роду 256. Ланка 241 з ланкою 242 утворює обертальну кінематичну пару першого роду 251. Ланка 243 утворює обертальну кінематичну пару першого роду 254 з ланкою 244. Ланка 245 утворює обертальну кінематичну пару першого роду 257 з ланкою 246. Ланка 242 утворює обертальну кінематичну пару першого роду 252 із проміжною ланкою 249. Ланка 244 утворює обертальну кінематичну пару першого роду 255 із проміжною ланкою 249, а ланка 246 утворює обертальну кінематичну пару першого роду 258 із проміжною ланкою 249. При цьому осі обертання обертальних кінематичних пар першого роду 250-258 паралельні між собою. Ланка 247 утворює з підставою 240 обертальну кінематичну пару першого роду 259, а з ланкою 248 утворює обертальну кінематичну пару першого роду 260. Ланка 248, у свою чергу, утворює обертальну кінематичну пару першого роду 261 із проміжною ланкою 249. При цьому осі обертання обертальних кінематичних пар першого роду 259-261 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 250-258. Шарнірно-важільний точний прямолінійно-напрямний механізм (Фіг. 17) містить підставу 262 і кінематичний ланцюг механізму, який складається із чотирьох структурних груп ланок, одна з яких містить два рухомі важелі 263 і 264, друга містить два рухомі важелі 265 і 266, третя містить два рухомі важелі 267 і 268, а четверта містить два рухомі важелі 267 і 269, при цьому важелі 264 і 268 зв'язані між собою через проміжну ланку 270 у вигляді хрестовини, а важелі 266 і 269 також зв'язані між собою через проміжну ланку 271 у вигляді хрестовини. Ланка 263 утворює з підставою 262 обертальну кінематичну пару першого роду 272. Ланка 265 з ланками 263 і 264 утворює подвійну обертальну кінематичну пару першого роду 273. Ланка 264 утворює обертальну кінематичну пару першого роду 275 із хрестовиною 270, а ланка 266 утворює обертальну кінематичну пару першого роду 274 з ланкою 266. Ланка 266 утворює із хрестовиною 271 обертальну кінематичну пару першого роду 276. При цьому осі обертання обертальних кінематичних пар першого роду 272-276 паралельні між собою. Ланка 267 утворює з підставою 262 обертальну кінематичну пару першого роду 277, а з ланками 268 і 269 утворює обертальні кінематичну пари першого роду 238. Ланка 229, у свою чергу, утворює обертальну кінематичну пару першого роду 280 і 281 із хрестовинами 270 і 271 відповідно. При цьому осі обертання обертальних кінематичних пар першого роду 277-281 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 272-276. Наведені варіанти виконання пропонованого шарнірно-важільного точного спрямованогопрямолінійно-напрямного механізму не вичерпують усіх його можливих варіантів. Так, число структурних груп ланок у його кінематичному ланцюзі може бути й більше чотирьох. Так, число проміжних ланок може бути й більше двох. Так, число структурних груп ланок, осі обертальних пар яких розташовані під кутом одна до одної, може бути й більше двох, кут між осями обертальних пар різних структурних груп ланок може бути й менше 90°. Шарнірно-важільний точний прямолінійно-напрямний механізм (див. Фіг. 1) працює в такий спосіб. При обертанні провідної ланки 2 приводиться в рух ланка 3, яка через обертальну кінематичну пару першого роду 9 приводить ланку 6 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. Шарнірно-важільний точний прямолінійно-напрямний механізм (див. Фіг. 2) працює в такий спосіб. При обертанні провідної ланки 14 приводиться в складний рух на площині ланка 15, яка за допомогою дворухомого сферичного шарніра 22 з пальцем на одній сферичній поверхні й круговим пазом на іншій сферичній поверхні приводить ланку 17 у складний рух на площині, яка 6 UA 102668 U 5 10 15 20 25 30 35 40 45 50 55 60 розташована перпендикулярно площині, в якій рухаються ланки 14 і 15, а ланка 16 приводиться ланкою 17 в обертовий рух у тій же площині, в якій рухається ланка 17. При цьому крапка, співпадаюча із центром дворухомого сферичного шарніра 22, робить прямолінійне поступальне переміщення в напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. Шарнірно-важільний точний прямолінійно-напрямний механізм (див. Фіг. 3) працює в такий спосіб. При обертанні провідної ланки 24 приводиться в складний рух на площині ланка 25, яка за допомогою трирухомого сферичного шарніра 32 приводить ланку 27 у складний рух на площині, яка розташована перпендикулярно площині, в якій рухаються ланки 24 і 25, а ланка 26 приводиться ланкою 27 в обертовий рух у тій же площині, в якій рухається ланка 27. При цьому крапка, співпадаюча із центром трирухомого сферичного шарніра 32, робить прямолінійне поступальне переміщення в напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. Шарнірно-важільний точний прямолінійно-напрямний механізм (див. Фіг. 4) працює в такий спосіб. При обертанні провідної ланки 38 приводиться в рух ланка 39, яка через обертальну кінематичну пару першого роду 47 приводить проміжну ланку 40 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. Шарнірно-важільний точний прямолінійно-напрямний механізм (див. Фіг. 5) працює в такий спосіб. При обертанні провідної ланки 53 приводиться в рух ланка 54, яка через обертальну кінематичну пару першого роду 63 приводить проміжну ланку 55 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. Шарнірно-важільний точний прямолінійно-напрямний механізм (див. Фіг. 6) працює в такий спосіб. При обертанні провідної ланки 69 приводиться в рух ланка 70, яка через обертальну кінематичну пару першого роду 78 приводить проміжну ланку 71 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. Шарнірно-важільний точний прямолінійно-напрямний механізм (див. Фіг. 7) працює в такий спосіб. При обертанні провідної ланки 84 приводиться в рух ланка 85, яка через обертальну кінематичну пару першого роду 93 приводить проміжну ланку 86 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. Шарнірно-важільний точний прямолінійно-напрямний механізм (див. Фіг. 8) працює в такий спосіб. При обертанні провідної ланки 99 приводиться в рух ланка 100, яка через обертальну кінематичну пару першого роду 110 приводить проміжну ланку 101 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. Шарнірно-важільний точний прямолінійно-напрямний механізм (див. Фіг. 9) працює в такий спосіб. При обертанні провідної ланки 116 приводиться в рух ланка 117, яка через обертальну кінематичну пару першого роду 127 приводить проміжну ланку 118 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. Шарнірно-важільний точний прямолінійно-напрямний механізм (див. Фіг. 10) працює в такий спосіб. При обертанні провідної ланки 135 приводиться в рух ланка 136, яка через обертальну кінематичну пару першого роду 147 приводить проміжну ланку 137 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. Шарнірно-важільний точний прямолінійно-напрямний механізм (див. Фіг. 11) працює в такий спосіб. При обертанні провідної ланки 155 приводиться в рух ланка 156, яка через обертальну кінематичну пару першого роду 167 приводить проміжну ланку 157 у прямолінійний 7 UA 102668 U 5 10 15 20 25 30 35 40 45 поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. Шарнірно-важільний точний прямолінійно-напрямний механізм (див. Фіг. 12) працює в такий спосіб. При обертанні провідної ланки 175 приводиться в рух ланка 176, яка через обертальну кінематичну пару першого роду 187 приводить проміжну ланку 177 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. Шарнірно-важільний точний прямолінійно-напрямний механізм (див. Фіг. 13) працює в такий спосіб. При обертанні провідної ланки 193 приводяться в складний симетричний рух у просторі ланки 194 і 195, які за допомогою трирухомих сферичних шарнірів 204 і 205 приводять ланки 189 і 190 в обертовий рух на площині, яка перпендикулярна площині обертання ланки 193. При цьому ланки 191 і 192 роблять складний рух у площині розташування ланок 189 і 190, а крапка, співпадаюча з віссю обертання обертальної кінематичної пари 200, робить прямолінійне поступальне переміщення в напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок і лінії симетрії п'ятикутника, утвореного осями обертання обертальних кінематичних пар першого роду 196-200. Шарнірно-важільний точний прямолінійно-напрямний механізм (див. Фіг. 14) працює в такий спосіб. При обертанні провідної ланки 211 приводяться в складний симетричний рух у просторі ланки 212 і 213, які за допомогою трирухомих сферичних шарнірів 221 і 222 приводять ланки 207 і 208 в обертовий рух на площині, яка перпендикулярна площини обертання ланки 211. При цьому ланки 209 і 210 роблять складний рух у площині розташування ланок 207 і 208, а крапка, співпадаюча з віссю обертання обертальної кінематичної пари 217, робить прямолінійне поступальне переміщення в напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок і лінією симетрії ромба, утвореного осями обертання обертальних кінематичних пар першого роду 214-217. Шарнірно-важільний точний прямолінійно-напрямний механізм (див. Фіг. 15) працює в такий спосіб. При обертанні провідної ланки 228 приводиться в рух ланка 229, яка через обертальну кінематичну пару першого роду 239 приводить проміжну ланку 230 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. Шарнірно-важільний точний прямолінійно-напрямний механізм (див. Фіг. 16) працює в такий спосіб. При обертанні провідної ланки 247 приводиться в рух ланка 248, яка через обертальну кінематичну пару першого роду 261 приводить проміжну ланку 249 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. Шарнірно-важільний точний прямолінійно-напрямний механізм (див. Фіг. 17) працює в такий спосіб. При обертанні провідної ланки 267 приводяться в рух ланки 268 і 269, які через обертальні кінематичні пари першого роду 280 і 281 приводять проміжні ланки 270 і 271 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 60 1. Шарнірно-важільний точний прямолінійно-напрямний механізм, що містить підставу й кінематичний ланцюг, який складається з рухомих ланок у вигляді важелів, утворюючих між собою й з підставою обертальні кінематичні пари, який відрізняється тим, що його кінематичний ланцюг містить щонайменше дві структурні групи ланок, кожна з яких містить щонайменше дві рухомі ланки, які утворюють між собою щонайменше одну обертальну кінематичну пару першого роду й щонайменше одну зовнішню обертальну кінематичну пару першого роду з підставою, причому осі обертання зазначених обертальних кінематичних пар паралельні між собою, при цьому осі обертання обертальних кінематичних пар першого роду щонайменше двох структурних груп ланок розташовані під кутом одна до одної, а щонайменше два важелі щонайменше двох структурних груп ланок зв'язані між собою щонайменше безпосередньо й принаймні безпосередньо й через групу проміжних ланок. 8 UA 102668 U 5 10 2. Механізм за п. 1, який відрізняється тим, що безпосередній зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок виконано у вигляді дворухомого сферичного шарніра з пальцем на одній сферичній поверхні й круговим пазом на іншій сферичній поверхні. 3. Механізм за п. 1, який відрізняється тим, що безпосередній зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок виконано у вигляді трирухомого сферичного шарніра. 4. Механізм за п. 1, який відрізняється тим, що зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок із проміжною ланкою виконано у вигляді дворухомого кінематичного з'єднання, наприклад шарніра Гука. 9 UA 102668 U 10 UA 102668 U 11 UA 102668 U 12 UA 102668 U 13 UA 102668 U 14 UA 102668 U 15 UA 102668 U 16 UA 102668 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 17
ДивитисяДодаткова інформація
Назва патенту англійськоюHinge-lever accurate rectilinear-guided mechanism by v.p. sablin
Автори англійськоюSablin Viktor Petrovych
Назва патенту російськоюШарнирно-рычажный точный прямолинейно-направляющий механизм в.п. саблина
Автори російськоюСаблин Виктор Петрович
МПК / Мітки
МПК: F16H 21/04
Мітки: в.п, сабліна, шарнірно-важільний, точний, прямолінійно-напрямний, механізм
Код посилання
<a href="https://ua.patents.su/19-102668-sharnirno-vazhilnijj-tochnijj-pryamolinijjno-napryamnijj-mekhanizm-vp-sablina.html" target="_blank" rel="follow" title="База патентів України">Шарнірно-важільний точний прямолінійно-напрямний механізм в.п. сабліна</a>
Кулісно-важільний прямолінійно-напрямний механізм
Номер патенту: 86369
Опубліковано: 25.12.2013
Автор: Музичишин Сергій Володимирович
МПК: F16H 21/00
Мітки: механізм, кулісно-важільний, прямолінійно-напрямний
Формула / Реферат:
Кулісно-важільний прямолінійно-напрямний механізм, що містить два важелі, прямокутний важіль, хрестоподібний повзун, діаду повзунів, який відрізняється тим, що додатково оснащений горизонтальною лінійкою, додатковою діадою повзунів, траверзою, повзуном і Т-подібним повзуном зі стопорними гвинтами, причому траверза встановлена на першому важелі за допомогою Т-подібного повзуна, другий важіль за допомогою повзуна встановлений на першому важелі...
Механізм в.п. сабліна з гнучкою ланкою
Номер патенту: 90317
Опубліковано: 26.05.2014
Автор: Саблін Віктор Петрович
МПК: F16H 19/00
Мітки: гнучкою, в.п, ланкою, механізм, сабліна
Формула / Реферат:
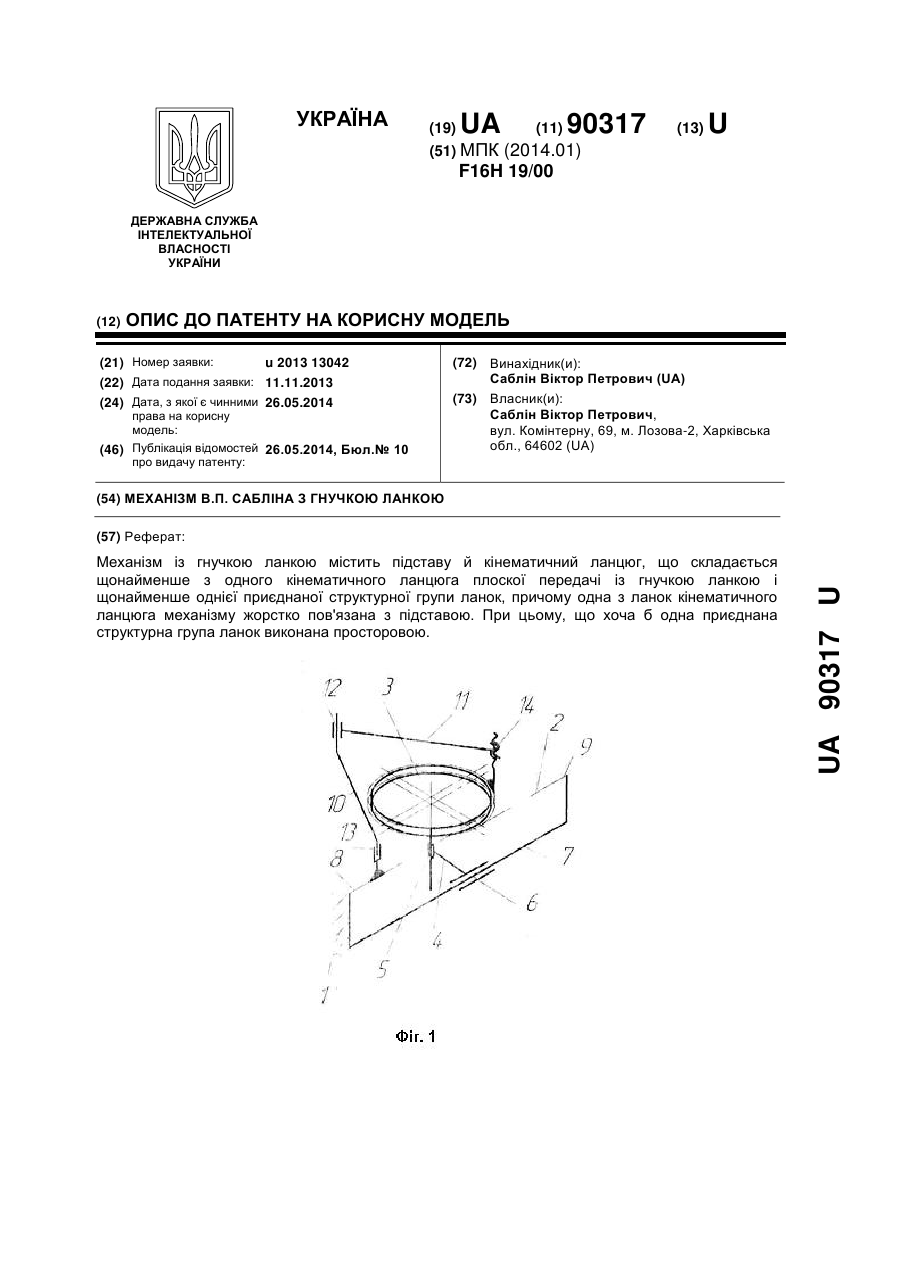
1. Механізм із гнучкою ланкою, що містить підставу й кінематичний ланцюг, що складається щонайменше з одного кінематичного ланцюга плоскої передачі із гнучкою ланкою і щонайменше однієї приєднаної структурної групи ланок, причому одна з ланок кінематичного ланцюга механізму жорстко пов'язана з підставою, який відрізняється тим, що хоча б одна приєднана структурна група ланок виконана просторовою.2. Механізм за п. 1, який відрізняється...
Шарнірно-важільний механізм з зупинками

Номер патенту: 44535
Опубліковано: 15.02.2002
Автори: Свєтловський Олександр Борисович, Кіницький Ярослав Тимофійович
МПК: F16H 21/00
Мітки: зупинками, механізм, шарнірно-важільний
Формула / Реферат:
Шарнірно-важільний механізм з зупинками, який має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, який шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом який відрізняється тим, що іншим плечем він зв'язаний з двома або більше: трьома, чотирма, п'ятьма, шістьма шатунами, які відповідно шарнірно зв'язані з повзунами, завдяки чому забезпечується зупинка двох або більше вихідних ланок.
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідних ланок
Номер патенту: 51985
Опубліковано: 16.12.2002
Автори: Свєтловський Олександр Борисович, Кіницький Ярослав Тимофійович
МПК: F16H 21/00
Мітки: вихідних, ланок, зупинки, шарнірно-важільний, регульованою, тривалістю, механізм
Формула / Реферат:
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідних ланок містить основу, на якій встановлені кривошип, коромисло і шатун у вигляді двоплечого важеля, що шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом, а іншим плечем за допомогою одного або декількох шатунів - з повзунами, який відрізняється тим, що довжина шатунів регульована.
Шестиланковий шарнірно-важільний механізм поступального переміщення об’єкта
Номер патенту: 32393
Опубліковано: 12.05.2008
Автори: Амбарцумянц Карен Робертович, Амбарцумянц Роберт Вачаганович
МПК: F16H 21/00
Мітки: механізм, шестиланковий, шарнірно-важільний, поступального, об'єкта, переміщення
Формула / Реферат:
Шестиланковий шарнірно-важільний механізм поступального переміщення об'єкта, що містить кривошип, шатуни, повзуни, об'єкт, що утворює шарнірні з'єднання з шатунами і поступальною парою з повзуном, який відрізняється тим, що об'єкт одним кінцем шарнірно з'єднаний з шатуном кривошипно-повзунного механізму, а іншим кінцем шарнірно з'єднаний з іншим шатуном, що утворює шарнірне з'єднання з повзуном, а лінії, що з'єднують центри шарнірів об'єкта...
Попередній патент: Віброекструдер для формування прямокутних у поперечному перерізі фібробетонних виробів
Наступний патент: Термоелектричний термостат
Випадковий патент: Трипроменева дистанційна розпірка