Захват для маніпулювання деталями тіл обертання
Номер патенту: 44205
Опубліковано: 25.09.2009
Автори: Калініна Мирослава Федорівна, Багомедова Таміла Багомедівна, Кузнєцов Юрій Миколайович
Формула / Реферат
Захват для маніпулювання деталями тіл обертання, що містить корпус, до якого на осях з одного боку прикріплені паралелограмні важільно-шарнірні механізми з ведучими і веденими важелями, а також замикаючими ланками з другого боку, зв'язаними із затискними пальцями з можливістю приведення в дію від зубчатої рейки через сектори на кінці ведучих важелів, який відрізняється тим, що затискні пальці виконані у вигляді еластичних гнучких пустотілих елементів із гофрами на зовнішній стороні і оснащені датчиками контакту пальців із заготовкою.
Текст
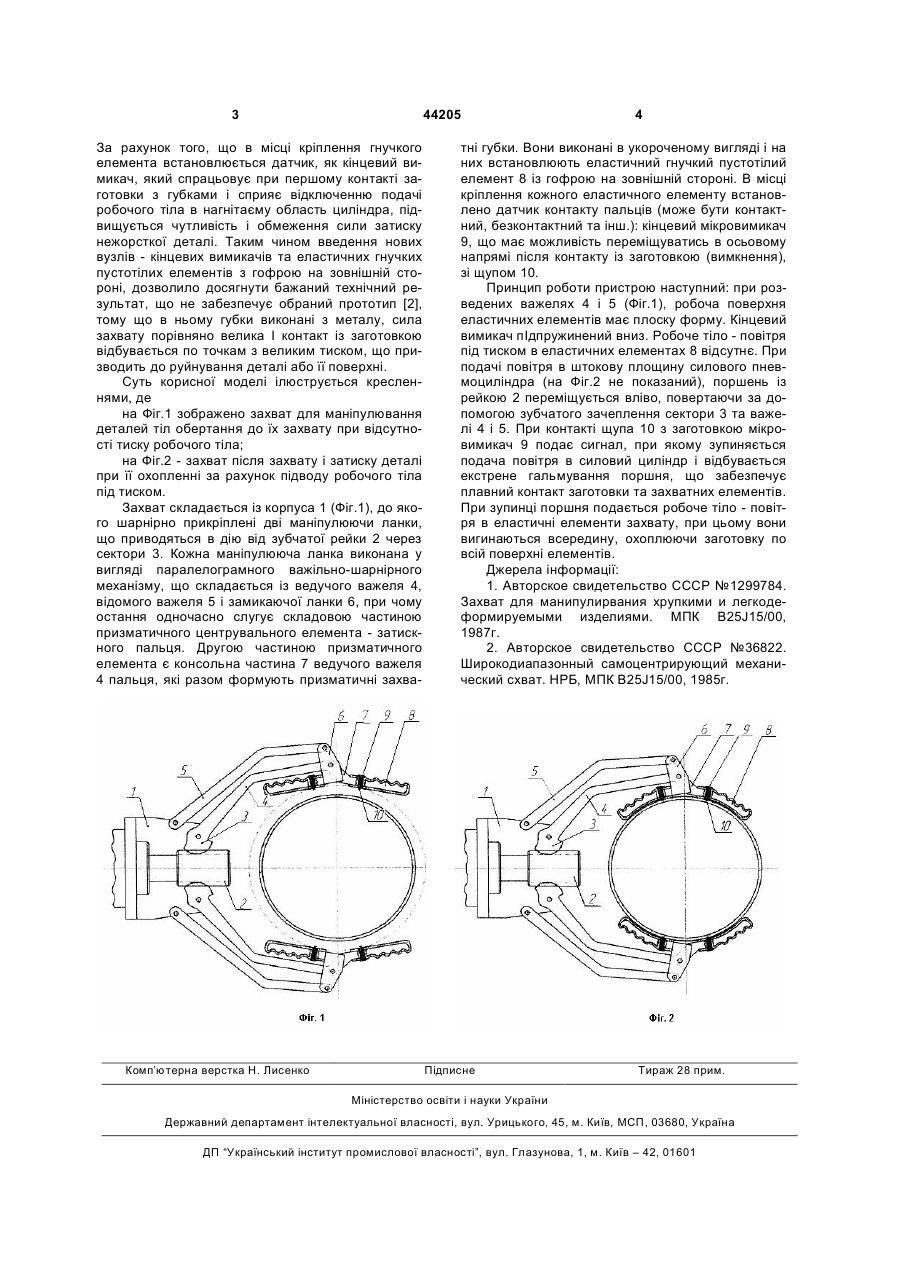
Захват для маніпулювання деталями тіл обертання, що містить корпус, до якого на осях з од 3 44205 За рахунок того, що в місці кріплення гнучкого елемента встановлюється датчик, як кінцевий вимикач, який спрацьовує при першому контакті заготовки з губками і сприяє відключенню подачі робочого тіла в нагнітаєму область циліндра, підвищується чутливість і обмеження сили затиску нежорсткої деталі. Таким чином введення нових вузлів - кінцевих вимикачів та еластичних гнучких пустотілих елементів з гофрою на зовнішній стороні, дозволило досягнути бажаний технічний результат, що не забезпечує обраний прототип [2], тому що в ньому губки виконані з металу, сила захвату порівняно велика І контакт із заготовкою відбувається по точкам з великим тиском, що призводить до руйнування деталі або її поверхні. Суть корисної моделі ілюструється кресленнями, де на Фіг.1 зображено захват для маніпулювання деталей тіл обертання до їх захвату при відсутності тиску робочого тіла; на Фіг.2 - захват після захвату і затиску деталі при її охопленні за рахунок підводу робочого тіла під тиском. Захват складається із корпуса 1 (Фіг.1), до якого шарнірно прикріплені дві маніпулюючи ланки, що приводяться в дію від зубчатої рейки 2 через сектори 3. Кожна маніпулююча ланка виконана у вигляді паралелограмного важільно-шарнірного механізму, що складається із ведучого важеля 4, відомого важеля 5 і замикаючої ланки 6, при чому остання одночасно слугує складовою частиною призматичного центрувального елемента - затискного пальця. Другою частиною призматичного елемента є консольна частина 7 ведучого важеля 4 пальця, які разом формують призматичні захва Комп’ютерна верстка Н. Лиcенко 4 тні губки. Вони виконані в укороченому вигляді і на них встановлюють еластичний гнучкий пустотілий елемент 8 із гофрою на зовнішній стороні. В місці кріплення кожного еластичного елементу встановлено датчик контакту пальців (може бути контактний, безконтактний та інш.): кінцевий мікровимикач 9, що має можливість переміщуватись в осьовому напрямі після контакту із заготовкою (вимкнення), зі щупом 10. Принцип роботи пристрою наступний: при розведених важелях 4 і 5 (Фіг.1), робоча поверхня еластичних елементів має плоску форму. Кінцевий вимикач пІдпружинений вниз. Робоче тіло - повітря під тиском в еластичних елементах 8 відсутнє. При подачі повітря в штокову площину силового пневмоциліндра (на Фіг.2 не показаний), поршень із рейкою 2 переміщується вліво, повертаючи за допомогою зубчатого зачеплення сектори 3 та важелі 4 і 5. При контакті щупа 10 з заготовкою мікровимикач 9 подає сигнал, при якому зупиняється подача повітря в силовий циліндр і відбувається екстрене гальмування поршня, що забезпечує плавний контакт заготовки та захватних елементів. При зупинці поршня подається робоче тіло - повітря в еластичні елементи захвату, при цьому вони вигинаються всередину, охоплюючи заготовку по всій поверхні елементів. Джерела інформації: 1. Авторское свидетельство СССР №1299784. Захват для манипулирвания хрупкими и легкодеформируемыми изделиями. МПК В25J15/00, 1987г. 2. Авторское свидетельство СССР №36822. Широкодиапазонный самоцентрирующий механический схват. НРБ, МПК В25J15/00, 1985г. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGripping device for manipulation of components of bodies of revolution
Автори англійськоюKuznietsov Yurii Mykolaiovych, Bahomedova Tamila Bahomedivna, Kalinina Myroslava Fedorivna
Назва патенту російськоюЗахват для манипулирования деталями тел вращения
Автори російськоюКузнецов Юрий Николаевич, Багомедова Тамила Багомедовна, Калинина Мирослава Федоровна
МПК / Мітки
МПК: B25J 15/00
Мітки: обертання, деталями, тіл, захват, маніпулювання
Код посилання
<a href="https://ua.patents.su/2-44205-zakhvat-dlya-manipulyuvannya-detalyami-til-obertannya.html" target="_blank" rel="follow" title="База патентів України">Захват для маніпулювання деталями тіл обертання</a>
Пристрій для маніпулювання м’якими деталями
Номер патенту: 51982
Опубліковано: 16.12.2002
Автори: Драпак Георгій Мефодійович, Онофрійчук Володимир Іванович, Романець Тарас Петрович
МПК: B65H 3/22
Мітки: маніпулювання, деталями, пристрій, м'якими
Формула / Реферат:
Пристрій для маніпулювання м'якими деталями, який містить голкотримачі з голками, шарнірно закріплені в корпусі, який відрізняється тим, що голкотримачі додатково шарнірно з'єднані з підковоподібною пружною траверсою, а посередині корпусу розташований регулювальний гвинт, під яким розміщена підпружинена опорна планка, встановлена з можливістю вертикальних переміщень відносно корпусу, у поздовжніх пазах якої знаходяться вістря голок.
Важільно-механічний двопальцьовий захват
Номер патенту: 38544
Опубліковано: 15.05.2001
Автори: Уріх Євген Йосипович, Хмара Леонід Андрійович, Блехарська Олена Миколаївна, Соколов Ігор Анатолійович
МПК: E02F 3/28
Мітки: двопальцьовий, важільно-механічний, захват
Текст:
...Блехарська Олена Миколаївна 38544 обертаючись проти годинникової стрілки, за допомогою тяги 9 обертає ведену щелепу 8 за годинниковою стрілкою відносно шарніра її кріплення до корпусу тримача 6, при цьому відбувається захват матеріалу та його утримання в щелепах захвату. Використання важільно-механічного двопальцьового захвату дозволяє спростити конструкцію захвату, розширити технологічні можливості робочого обладнання. Джерела...
Захват для утримування ємності

Номер патенту: 17545
Опубліковано: 15.09.2006
Автори: Гутеньов Віталій Олександрович, Воскобойник Володимир Володимирович, Коновальський Роман Олександрович, Аржанов Сергій Юрійович
Мітки: ємності, захват, утримування
Формула / Реферат:
Захват для утримування ємності, який складається з корпусу захвата, на якому встановлено губки захвата із закріпленими накладками, профільованими під форму ємності у місці її утримання, вузол повороту захвата в полі сил тяжіння, вузол повороту губок захвата для їх відведення у крайнє положення та повернення у вихідне положення, який відрізняється тим, що одна губка захвата є частиною корпусу захвата або закріплена на ньому; вузол повороту...
Захват для тари пляшкового типу
Номер патенту: 48560
Опубліковано: 15.08.2002
Автори: Корчменюк Олександр Іванович, Грисенко Микола Архипович
МПК: B65D 23/10, B67B 7/00
Мітки: захват, пляшкового, тари, типу
Формула / Реферат:
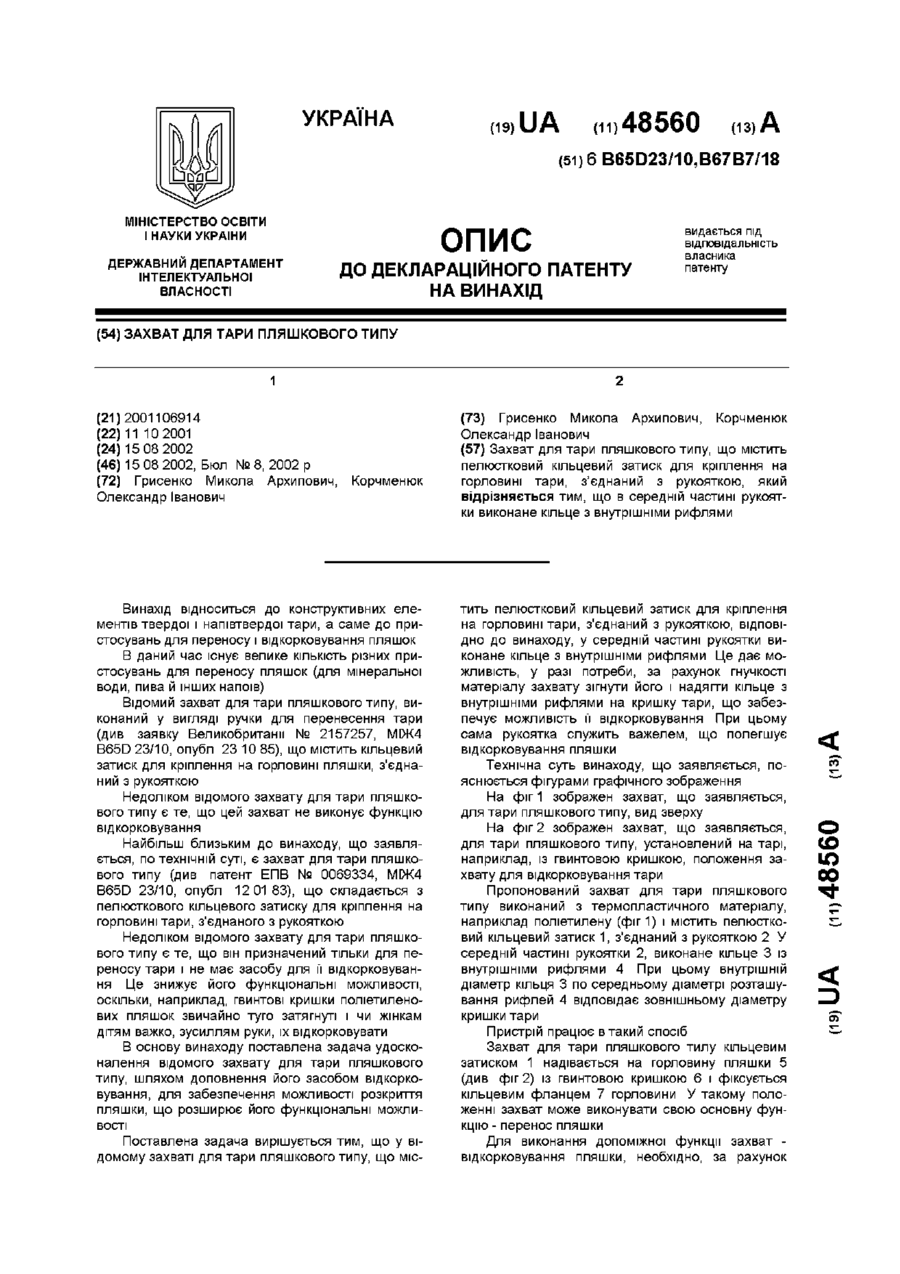
Захват для тари пляшкового типу, що містить пелюстковий кільцевий затиск для кріплення на горловині тари, з’єднаний з рукояткою, який відрізняється тим, що в середній частині рукоятки виконане кільце з внутрішніми рифлями.
Захват для механічних випробувань тонкостінних трубчастих взірців
Номер патенту: 32773
Опубліковано: 15.02.2001
Автори: Рач Валентин Анатолійович, Калюжний Валерій Вілінович
МПК: G01N 3/04
Мітки: випробувань, механічних, тонкостінних, трубчастих, захват, взірців
Формула / Реферат:
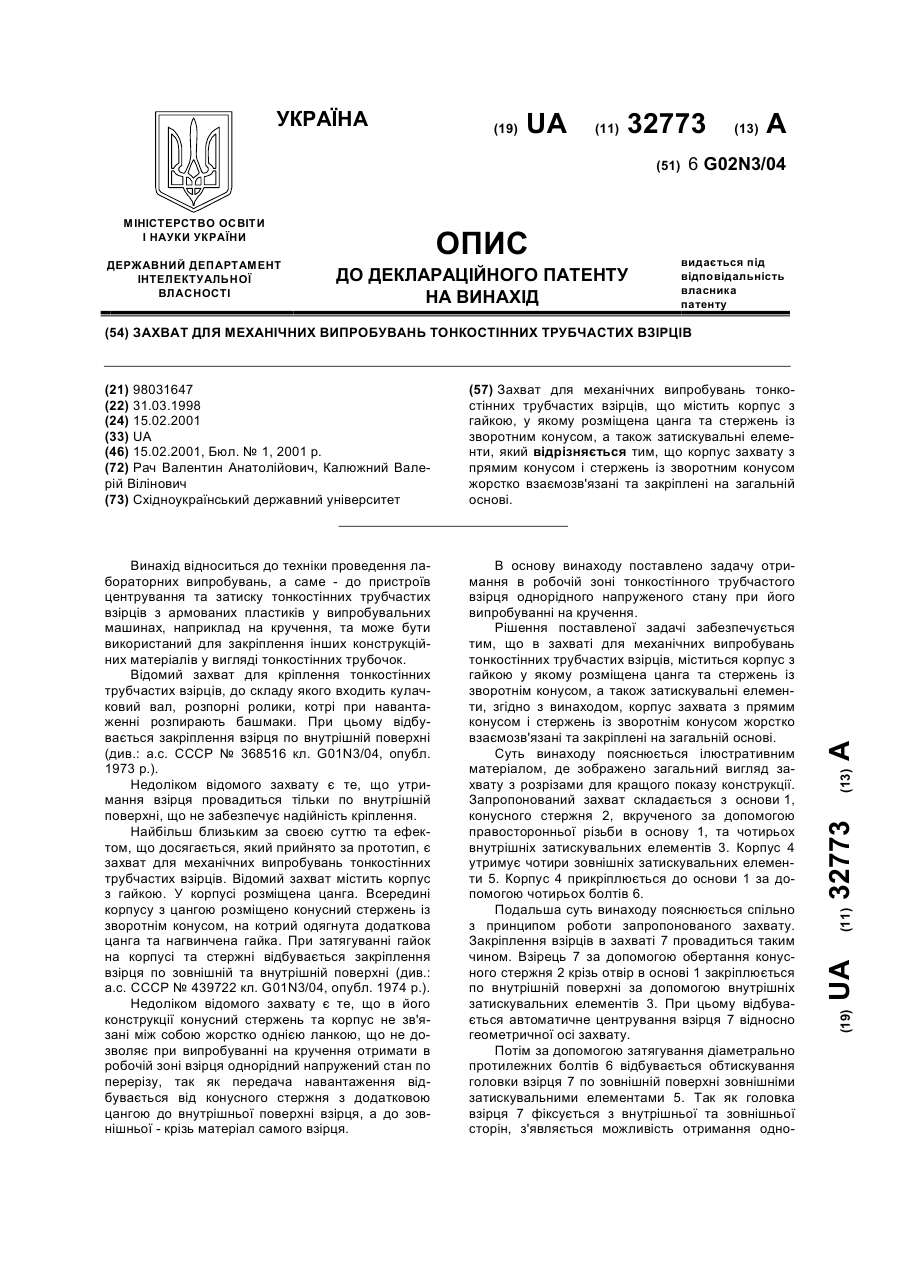
Захват для механічних випробувань тонкостінних трубчастих взірців, що містить корпус з гайкою, у якому розміщена цанга та стержень із зворотним конусом, а також затискувальні елементи, який відрізняється тим, що корпус захвату з прямим конусом і стержень із зворотним конусом жорстко взаємозв'язані та закріплені на загальній основі.
Попередній патент: Пристрій для керування адаптивним роботом
Наступний патент: Апарат для ультразвукової терапії
Випадковий патент: Пристрій розширення по входу для мікрокомп'ютера