Пристрій для керування адаптивним роботом
Номер патенту: 44204
Опубліковано: 25.09.2009
Автори: Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович

Формула / Реферат
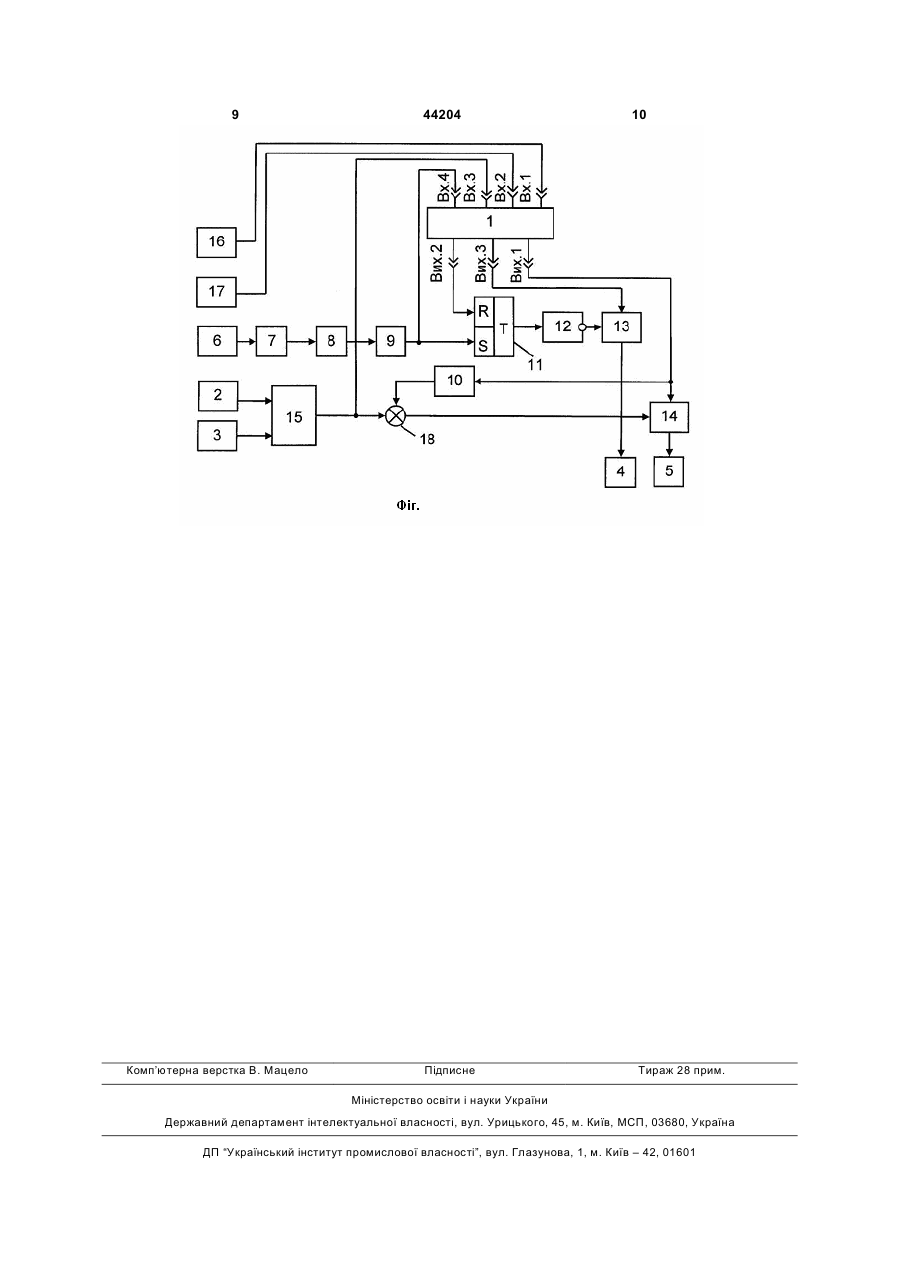
Пристрій для керування адаптивним роботом, що містить комп'ютерний блок керування, тактильні датчики, перший і другий приводи, датчик проковзування, вихід якого з'єднаний з входом підсилювача, послідовно з'єднані диференціатор, перший пороговий елемент, тригер, елемент заперечення та перший керований ключ, вихід якого підключений до входу першого привода, а сигнальний вхід - до третього виходу комп'ютерного блока керування, елемент І, перший та другий входи якого з'єднані з виходами відповідних тактильних датчиків, та другий керований ключ, вихід якого з'єднаний з входом другого привода, а сигнальний вхід - з першим виходом комп'ютерного блока керування, другий вихід якого підключений до другого входу тригера, вихід підсилювача з'єднаний з входом диференціатора, який відрізняється тим, що до складу пристрою додатково введені датчик вертикального переміщення і датчик стискального зусилля, виходи яких підключені відповідно до першого та другого входів комп'ютерного блока керування, а також послідовно з'єднані другий пороговий елемент і суматор, вихід якого підключений до керованого входу другого керованого ключа, а другий вхід - до виходу елемента І та третього входу комп'ютерного блока керування, четвертий вхід якого з'єднаний з виходом першого порогового елемента.
Текст
Пристрій для керування адаптивним роботом, що містить комп'ютерний блок керування, тактильні датчики, перший і другий приводи, датчик проковзування, вихід якого з'єднаний з входом підсилювача, послідовно з'єднані диференціатор, перший пороговий елемент, тригер, елемент заперечення та перший керований ключ, вихід якого підключений до входу першого привода, а сигнальний вхід - до третього виходу комп'ютерного 3 44204 4 захватного органа по відношенню до вертикальних чному режимі здійснювати процес корекції геометричних розмірів деталі, оскільки губки мо(центрування) положення губок захватного органа жуть суттєво зміщуватись при ідентифікації і ствопри захоплюванні деталей з невідомою масою в ренні необхідного стискального зусилля в режимі режимі неперервного підйому, а також підвищити неперервного підйому; надійність пристрою при реалізації адаптивним - низькі функціональні можливості пристрою роботом динамічних режимів з високими швидкопри захоплюванні в режимі неперервного підйому стями. деталей (з невідомою масою) з забезпеченням Поставлена задача вирішується тим, що до необхідного фіксованого (наприклад, центрованоскладу пристрою для керування адаптивним робого) положення губок на деталі перед реалізацією том, що містить комп'ютерний блок керування, адаптивним роботом запланованої траєкторії. тактильні датчики, перший і другий приводи, датНайбільш близьким до запропонованого є чик проковзування, вихід якого з'єднаний з входом пристрій для керування адаптивним роботом [Авт. підсилювача, послідовно з'єднані диференціатор, свід. СРСР №1188700, МКІ G05В19/00, опубл. перший пороговий елемент, тригер, елемент ЗАБюл. №40, 1985], що прийнятий як прототип. ПриПЕРЕЧЕННЯ та перший керований ключ, вихід стрій для керування адаптивним роботом містить якого підключений до входу першого привода, а захватний орган з губками, комп'ютерний блок сигнальний вхід -до третього виходу комп'ютернокерування, що виконує функції блока задавання го блоку керування, елемент І, перший та другий програми, перший і другий тактильні датчики, певходи якого з'єднані з виходами відповідних тактирший і другий приводи відповідно для стискання льних датчиків, та другий керований ключ, вихід губок та підйому захватного органу, датчик прокоякого з'єднаний з входом другого привода, а сигвзування, послідовно з'єднані підсилювач, дифенальний вхід - з першим виходом комп'ютерного ренціатор, пороговий елемент, тригер, елемент блоку керування, другий вихід якого підключений ЗАПЕРЕЧЕННЯ й перший ключ, а також послідовдо другого входу тригера, вихід підсилювача з'єдно підключені елемент І й другий ключ, вихід якого наний з входом диференціатора, згідно корисної з'єднаний з входом другого приводу, а другий сигмоделі додатково введені датчик вертикального нальний вхід - з першим виходом комп'ютерного переміщення і датчик стискального зусилля, вихоблоку керування, підключеного другим виходом до ди яких підключені відповідно до першого та друдругого входу тригера, а третім виходом - до другого входів комп'ютерного блоку керування, а тагого сигнального входу першого ключа, вихід якого кож послідовно з'єднані другий пороговий елемент з'єднаний із входом першого приводу стискання і суматор, вихід якого підключений до керованого губок, вихід датчика проковзування з'єднаний із входу другого керованого ключа, а другий вхід - до входом підсилювача, а виходи тактильних датчиків виходу елемента І та третього входу комп'ютерноз'єднані відповідно з першим і другим входами го блоку керування, четвертий вхід якого з'єднаний елемента І. Такий пристрій має наступні проблеми: з виходом першого порогового елемента. - пристрій після завершення процесу захоплюВинахідницький задум полягає в тому, що вання деталі захватним органом робота (в режимі схемотехнічна реалізація пристрою для керування неперервного підйому) забезпечує фіксацію губок адаптивним роботом дозволяє забезпечувати в на деталі в завжди зміщеному відносно центра автоматичному режимі процес самоцентрування деталі положенні. Величина такого зміщення - це губок захватного органу на деталі з невідомою відстань, яку проходить у вертикальному напрямку масою, тобто дає можливість адаптивному роботу захватний орган до спрацьовування датчика пров режимі неперервного підйому ідентифікувати ковзування, зокрема при здійсненні адаптивним необхідну величину стискального зусилля відповіроботом неперервного підйому в процесі формудно до маси захоплюваної деталі та остаточно вання необхідної величини стискального зусилля, створювати дане стискального зусилля між губкащо відповідає попередньо невідомій масі деталі. ми захватного пристрою після їх відповідного пеДаний недолік є причиною зниження швидкостей реміщення в апріорно задану (початкову) позицію переміщення адаптивним роботом деталей такого на деталі перед подальшою реалізацією адаптивкласу для надійної реалізації запланованих траєкним роботом запланованої траєкторії. При цьому торій, а в цілому - до зниження швидкодії автомасуттєво підвищується надійність (орієнтовно на 10тизованих технологічних процесів; 12%) процесів захоплювання та реалізації запла- мають місце обмежені функціональні можлинованих траєкторій з високими швидкостями певості пристрою, що не дозволяють адаптивному реміщення деталей. роботу здійснювати в автоматичному режимі кореНа мал. наведена функціональна схема прикцію (центрування) зміщеного в процесі неперестрою для керування адаптивним роботом. рвного підйому положення губок захватного органа Пристрій містить комп'ютерний блок керування при ідентифікації величини стискального зусилля 1, перший 2 і другий 3 тактильні датчики, які розгубок для деталі з невідомою масою перед початміщуються на затискних губках захватного органа ком реалізації запланованої траєкторії; (затискні губки і захватний орган на рисунку не - обмеженість використання пристрою через показано), перший 4 і другий 5 приводи відповідно відсутність можливості розпізнавання деталей, що стискання губок і підйому захватного органа, датвідрізняються між собою за масою. чик проковзування 6, підсилювач 7, диференціатор В основу винаходу поставлено задачу удоско8, перший 9 і другий 10 порогові елементи, тригер налення пристрою для керування адаптивним ро11, елемент ЗАПЕРЕЧЕННЯ 12, перший 13 і друботом шляхом введення додаткових електронних гий 14 керовані ключі, елемент І 15, датчик 16 верблоків обробки сигналів, які дозволять в автоматитикального переміщення захватного органа, дат 5 44204 6 захватного органа продовжують стискуватися, чик стискального зусилля 17 губок захватного орзбільшуючи величину стискального зусилля F(t) гана та суматор 18. Датчик проковзування 6 підгубок на деталі. При цьому через невідповідність ключений до входу підсилювача 7, що послідовно маси деталі величині стискального зусилля F(t) з'єднаний з диференціатором 8 та першим порогодеталь проковзує між губками, продовжуючи опивим елементом 9, вихід якого з'єднаний з першим ратися на поверхню стола. Поточне значення стивходом тригера 11 та четвертим входом комп'ютескального зусилля губок F(t) реєструється датчирного блоку керування 1, другий вхід якого з'єднаком зусилля 17 і надходить на другий вхід ний з датчиком стискального зусилля 17 губок, а комп'ютерного блоку керування 1. По мірі збільперший вхід - з датчиком 16 вертикального перешення стискального зусилля губок проковзування міщення захватного органа. Виходи тактильних деталі зменшується, при цьому зростає навантадатчиків 2 і 3 з'єднані відповідно з першим і другим ження на захватний орган. Навантаження зростає входами елемента І 15. Вихід першого керованого до тих пір, поки має місце процес проковзування ключа 13 підключений до входу першого привода деталі між губками захватного органа. Величину 4, його сигнальний вхід - до третього виходу комцього механічного навантаження реєструє датчик п'ютерного блоку керування 1, а керований вхід проковзування 6 (наприклад, тензорезистор). Надо виходу елемент ЗАПЕРЕЧЕННЯ 12. Перший пруга з датчика 6 підсилюється підсилювачем 7 і вхід суматора 18 підключений до виходу елемента диференціюється диференціатором 8. При невідІ 15 і третього входу комп'ютерного блоку керуванповідності величини F(t) стискального зусилля ня 1, а другий вхід - до виходу другого порогового губок масі деталі сигнал на виході диференціатора елемента 10. Вихід тригера 11 з'єднаний з входом 8 не досягає порогу спрацьовування Uпop1 першого елемента ЗАПЕРЕЧЕННЯ 12, вихід суматора 18 порогового елемента 9 з статичною характеристиз'єднаний з керованим входом другого керованого кою ключа 14, вихід якого з'єднаний з входом другого привода 5, а сигнальний вхід - з входом другого ì ï0, при Uвх 9 Unop1. Вихідний імпульс Uвих9=1 першого на привод 4 стискання губок, які починають напорогового елемента 9 надходить на четвертий ближуватись одна до одної. В момент, коли губки вхід комп'ютерного блоку керування 1, який при захватного органа торкаються деталі, спрацьовуцьому на своєму першому виході встановлює нують тактильні датчики 2 і 3, на виході елемента І льовий сигнал, припиняючи вертикальний підйом 15 встановлюється одиничний сигнал Uвих15=1, деталі, фіксує значення вихідного сигналу LВП датякий надходить на третій вхід комп'ютерного блоку чика вертикального переміщення 16 і значення керування 1 та на перший вхід суматора 18, вихідвихідного сигналу FД датчика зусилля 17, що відний сигнал Uвих18=1 якого переводить другий кероповідає масі захоплюваної деталі. За величиною ваний ключ 14 до замкнутого стану, команда U02 сигналу FД комп'ютерний блок керування 1 розпіна підйом захватного органа з першого виходу знає тип відповідної деталі і формує відповідну до комп'ютерного блоку керування 1 надходить на вимог технологічного процесу траєкторію її передругий привод 5 підйому захватного органа, який міщення. Крім того, вихідний імпульс першого попочинає рухатись вгору у вертикальному напрямрогового елемента 9 Uвих9=1 переводить тригер 11 ку. Поточне значення L(t) вертикального перемів одиничний стан, на виході елемента ЗАПЕРЕщення захватного органа реєструється датчиком ЧЕННЯ 12 встановлюється нульовий сигнал "0", вертикального переміщення 16 і надходить на пещо призводить до розмикання першого керованого рший вхід комп'ютерного блоку керування 1. Губки ключа 13. При цьому припиняється надходження 7 44204 8 команд з третього виходу комп'ютерного блоку ням губок в їх початковому положенні по віднокерування 1 на перший привод 4 стискання губок шенню до деталі, а на третьому виході захватного органа, а деталь надійно затиснута між комп'ютерного блоку керування 1 формується когубками захватного органа з зусиллям, що відповіманда U01 на стискання губок, яка через замкнутий дає її масі. При цьому положення точок контакту перший ключ 13 надходить до першого приводу 4. губок захватного органа на деталі буде зміщеним Повторне (парне) спрацьовування тактильних по відношенню до їх початкового (центрованого) датчиків 2, 3 і поява на виході елемента І 15 відпоположення перед початком здійснення неперевідного одиничного сигналу Uвих15=l призводить до рвного підйому на величину LВП. Для корекції позамикання другого керованого ключа 14, але для ложення губок (перед реалізацією роботом заплакомп'ютерного блоку керування 1 цей парний одинованої траєкторії) з другого виходу комп'ютерного ничний сигнал Uвих15=l є тільки командою, що підблоку керування 1 після призупинення процесу тверджує наявність контакту губок з деталлю. Стистискання губок на другий вхід тригера 11 надхоскання губок здійснюється при умові Uвих17(t) - U 02 , захоплювання деталей з невідомою масою при U вих10 = í ï 1 при Uвх9 £ - U02 заданому положенні точок контакту губок захватî , ного органа на відповідній деталі. При цьому заякий при цьому спрацьовує, а його вихідний безпечується коректна реалізація процесу захопсигнал Uвих10=1 поступає на другий вхід суматора лювання широкої номенклатури деталей з 18. Відповідний вихідний сигнал суматора 18 ідентифікацією на основі методу неперервного Uвих18=1 замикає другий керований ключ 14, забезпідйому необхідного стискального зусилля, що печуючи надходження реверсного сигналу - U02 на узгоджується з масою деталей, та автоматичне другий привод 5 вертикального переміщення зарозміщення захватного органа в центрованому хватного органа. Захватний орган з розтиснутими положенні по відношенню до відповідної деталі губками переміщується вниз у вертикальному наперед початком реалізації запланованої траєкторії. прямку, при цьому величина переміщення L(t) конНові властивості пристрою розширюють область тролюється комп'ютерним блоком керування 1 застосування адаптивних роботів, а також забеззгідно з вихідними сигналами датчика 16. При репечують на 10-12% підвищення надійності процеверсному переміщенні захватного органа на велисів захоплювання деталей та реалізації запланочину LВП на першому виході комп'ютерного блоку ваних траєкторій з високими швидкостями їх керування 1 встановлюється нульовий сигнал, що переміщення. призводить до призупинення процесу вертикального опускання захватного органа з розташуван 9 Комп’ютерна верстка В. Мацело 44204 Підписне 10 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of adaptive robot
Автори англійськоюKondratenko Yurii Panteliiovych, Kondratenko Volodymyr Yuriiovych
Назва патенту російськоюУстройство для управления адаптивным роботом
Автори російськоюКондратенко Юрий Пантелеевич, Кондратенко Владимир Юрьевич
МПК / Мітки
МПК: B25J 19/02, G05B 19/00
Мітки: роботом, адаптивним, пристрій, керування
Код посилання
<a href="https://ua.patents.su/5-44204-pristrijj-dlya-keruvannya-adaptivnim-robotom.html" target="_blank" rel="follow" title="База патентів України">Пристрій для керування адаптивним роботом</a>
Пристрій для керування адаптивним роботом
Номер патенту: 43682
Опубліковано: 25.08.2009
Автори: Кондратенко Юрій Пантелійович, Кондратенко Володимир Юрійович
МПК: B25J 19/02, G05B 19/00
Мітки: керування, адаптивним, пристрій, роботом
Формула / Реферат:
Пристрій для керування адаптивним роботом, що містить комп'ютерний блок керування, тактильні датчики, перший і другий приводи, датчик проковзування, вихід якого з'єднаний з входом підсилювача, послідовно з'єднані диференціатор, пороговий елемент, тригер та елемент ЗАПЕРЕЧЕННЯ, перший керований ключ, вихід якого підключений до входу першого привода, а сигнальний вхід - до третього виходу комп'ютерного блока керування, послідовно з'єднані...
Пристрій для керування адаптивним роботом
Номер патенту: 31511
Опубліковано: 10.04.2008
Автори: Чернов Сергій Констянтинович, Кондратенко Володимир Юрійович, Марковський Ігор Володимирович, Кондратенко Юрій Пантелійович, Кондратенко Галина Володимирівна
МПК: B25J 19/02, G05B 19/00
Мітки: адаптивним, роботом, керування, пристрій
Формула / Реферат:
Пристрій для керування адаптивним роботом, що містить захватний орган, дві затискні губки, послідовно з'єднані датчик проковзування, перший підсилювач, диференціатор, пороговий елемент, вихід якого з'єднаний з S-входом першого RS-тригера, R-вхід якого призначений для сприйняття імпульсу запуску, елемент І, перший і другий входи якого з'єднані з виходами тактильних датчиків, встановлених на затискних губках, і приводи стискання губок та...
Пристрій для керування інтелектуальним роботом
Номер патенту: 41121
Опубліковано: 12.05.2009
Автори: Кондратенко Володимир Юрійович, Аль Суод Махмуд мохаммад Салем, Кондратенко Галина Володимирівна, Кондратенко Юрій Пантелійович
МПК: G05B 19/00, B25J 19/02
Мітки: пристрій, роботом, інтелектуальним, керування
Формула / Реферат:
Пристрій для керування інтелектуальним роботом, що містить захватний орган, дві затискні губки, послідовно з'єднані датчик проковзування, перший підсилювач, диференціатор, перший пороговий елемент, вихід якого з'єднаний з S-входом першого RS-тригера, R-вхід якого призначений для сприйняття сигналу запуску і є входом пристрою, елемент І, перший і другий входи якого з'єднані з виходами тактильних датчиків, встановлених на затискних губках,...
Демонстраційна модель мікроконтролерної системи стабілізації тиску маслостанції у системі керування роботом

Номер патенту: 24487
Опубліковано: 10.07.2007
Автори: Ломонос Андрій Іванович, Бялобрежський Олексій Володимирович, Пащенко Роман Олександрович
МПК: F04D 15/00
Мітки: керування, демонстраційна, системі, мікроконтролерної, тиску, модель, стабілізації, маслостанції, роботом
Формула / Реферат:
Демонстраційна модель мікроконтролерної системи стабілізації тиску маслостанції у системі керування роботом, що містить насосний агрегат, привідний електродвигун насосного агрегату з'єднаний з перетворювачем частоти, обчислювальний блок, блок відображення інформації, блок зв'язку виходів датчиків з обчислювальним блоком, датчики тиску і витрат встановлені на виході насосного агрегату, датчик швидкості розташований на одному валу з електричним...
Пристрій керування

Номер патенту: 65665
Опубліковано: 15.04.2004
Автори: Чигирин Олег Трохимович, Маранов Олександр Вікторович, Чигирин Юрій Трохимович
МПК: G06F 11/00
Формула / Реферат:
Пристрій керування, що складається з багаторозрядного цифрового лічильного каналу, дешифратора, схеми керування, яка включає формувач і два елементи затримки, і генератора, вихід якого з'єднано з першими входами першого багаторозрядного цифрового лічильного каналу, схеми керування і дешифратора, вихід якого з'єднано з виходом пристрою керування, вхід схеми керування через перший елемент затримки, перший формувач і другий елемент затримки...
Попередній патент: Спосіб корегування середовища знаходження біологічного об’єкта та пристрій для його здійснення
Наступний патент: Захват для маніпулювання деталями тіл обертання
Випадковий патент: Спосіб і пристрій для переробки вугілля