Кінематичне з’єднання
Номер патенту: 6060
Опубліковано: 15.04.2005
Автори: Маргуліс Михайло Володимирович, Суханов Дмитро Валентинович
Формула / Реферат
1. Кінематичне з'єднання, що містить обертальну й кульову кінематичні пари, розташовані з можливістю взаємодіяти між собою, яке відрізняється тим, що взаємодія здійснена через одну чи дві додаткові кінематичні пари, введені в з'єднання.
2. Кінематичне з'єднання за п. 1, яке відрізняється тим, що додаткова кінематична пара виконана у вигляді стрічкоподібної пари.
3. Кінематичне з'єднання за п. 1, яке відрізняється тим, що додаткові кінематичні пари виконані у вигляді двох пар - площинної та обертальної.
Текст
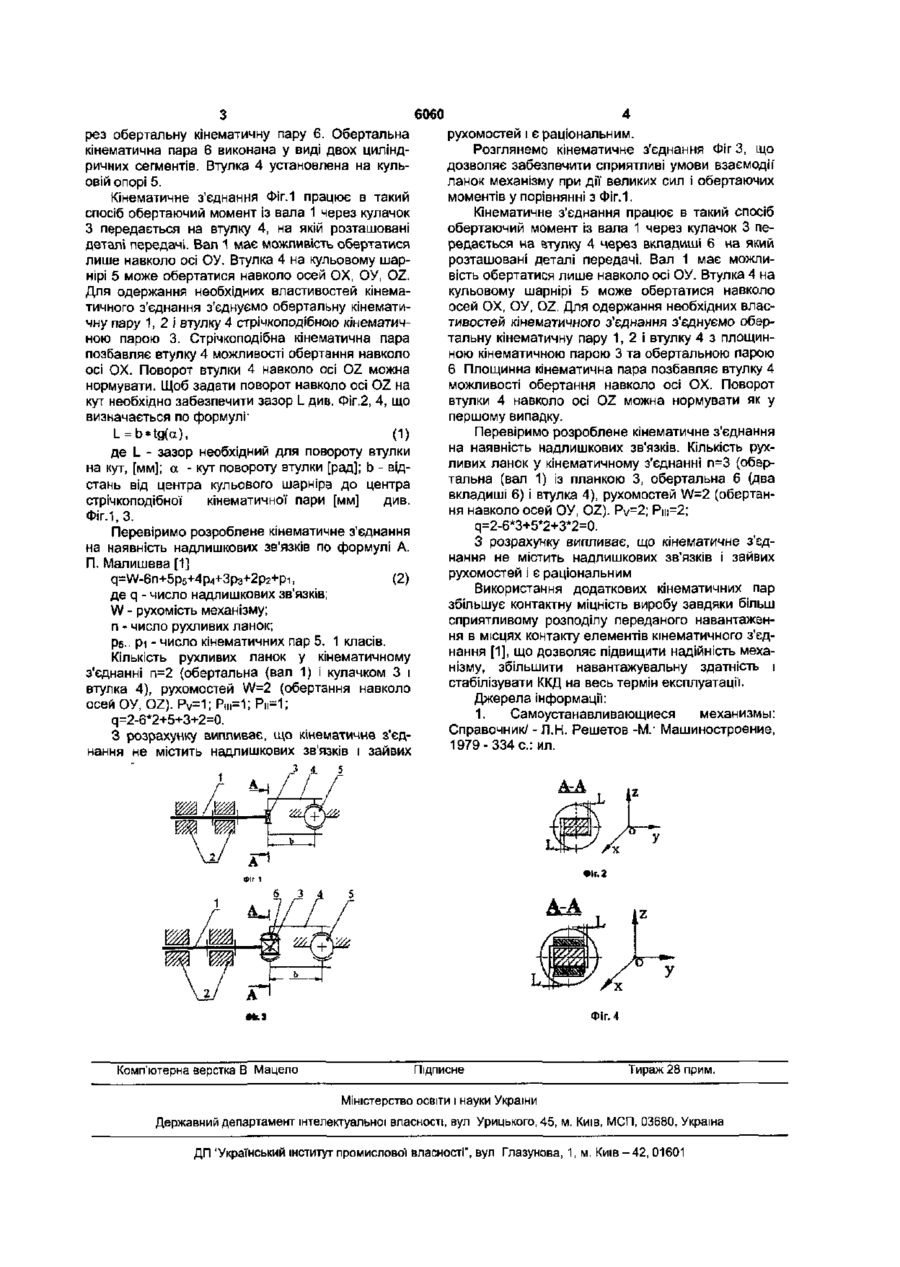
1. Кінематичне з'єднання, що містить обертальну й кульову кінематичні пари, розташовані з можливістю взаємодіяти між собою, яке відрізняється тим, що взаємодія здійснена через одну чи дві додаткові кінематичні пари, введені в з'єднання. 2. Кінематичне з'єднання за п. 1, яке відрізняється тим, що додаткова кінематична пара виконана у вигляді стрічкоподібної пари З Кінематичне з'єднання за п 1, яке відрізняється тим, що додаткові кінематичні пари виконані у вигляді двох пар - площинно)'та обертальної. Корисна модель відноситься до деталей машин і може бути використана в механічних передачах і ходовій частині засобів пересування. Відомо кінематичне з'єднання без надлишкових зв'язків і зайвих рухливостей, що містить дві обертальні пари і проміжний вал [1]. Це кінематичне з'єднання здатне передавати переміщення уздовж двох координатних осей і обертання також навколо двох координатних осей До технічних недоліків розглянутого кінематичного з'єднання можна віднести незадовільний розподіл кінематичних зв'язків. Це кінематичне з'єднання не забезпечує додаткового обертання навколо заданої осі Відомо кінематичне з'єднання без надлишкових зв'язків і зайвих рухливостей, що містить одну обертальну та одну поступальну пари [1]. Це кінематичне з'єднання здатне передавати переміщення уздовж двох координатних осей та обертання також навколо двох координатних осей, але в іншім сполученні. До технічних недоліків розглянутого кінематичного з'єднання також можна віднести незадовільний розподіл кінематичних зв'язків. Це кінематичне з'єднання не дозволяє нормувати кут обертання навколо заданої осі Найбільш близьким технічним рішенням - прототипом є кінематичне з'єднання без надлишкових зв'язків і зайвих рухомостей, яке утримує дві обертальні пари, розміщені на качанах і взаємодіючі через хрест [1 ] Це кінематичне з'єднання здатне передавати переміщення уздовж трьох координатних осей і обертання навколо однієї координатної осі До технічних недоліків розглянутого кінематичного з'єднання можна віднести незадовільний розподіл кінематичних зв'язків і відсутність можли вості нормувати поворот навколо заданої координатної осі В основу корисної моделі поставлена задача створити кінематичне з'єднання, у якому за рахунок введення додаткових елементів створюються необхідні рухомості і зв'язки, а також можливість задавати кут повороту однієї ланки щодо іншої ланки, що дозволить збільшити навантажувальну здатність, ККД, довговічність, надійність пристрою в цілому. Для рішення поставленої задачі в кінематичне з'єднання, що містить обертальну і кульову кінематичні пари, розташовані з можливістю взаємодіяти між собою, що відрізняється тим, що взаємодія здійснюється через одну чи дві додаткові кінематичні пари, введені в з'єднання При цьому додаткова пара виконана у виді стрічкоподібної чи площинної та обертальної пар. Суть корисної моделі пояснюється кресленнями: на Фіг.1 показане кінематичне з'єднання з обертальною 1, 2, стрічкоподібною 3 і кульовою 5 кінематичними парами, а на Фіг.2 зображений розріз А - А Фіг.1; на Фіг.З зображене кінематичне з'єднання з обертальною 1, 2, площинною 3, обертальною 6, і кульовою 5 кінематичними парами. На Фіг.4 - розріз А - А Фіг.З. Розглянемо це кінематичне з'єднання Фіг 1, що дозволяє забезпечити сприятливі умови взаємодії ланок механізму. Обертальна пара утворена валом 1 і опорами 2 На валі 1 знаходиться кулачок З, що вставлений у паз втулки 4 Втулка 4 установлена на кульовій опорі 5. Розглянемо кінематичне з'єднання по другому варіанту Фіг.З, що дозволяє забезпечити сприятливі умови взаємодії ланок механізму. Обертальна пара утворена валом 1 і опорами 2. На валі 1 знаходиться кулачок 3, що взаємодіє з втулкою 4 че О (О 6060 рез обертальну кінематичну пару 6. Обертальна кінематична пара 6 виконана у виді двох циліндричних сегментів. Втулка 4 установлена на кульовій опорі 5. Кінематичне з'єднання Фіг.1 працює в такий спосіб обертаючий момент із вала 1 через кулачок З передається на втулку 4, на якій розташовані деталі передачі. Вал 1 має можливість обертатися лише навколо осі ОУ. Втулка 4 на кульовому шарнірі 5 може обертатися навколо осей ОХ, ОУ, OZ. Для одержання необхідних властивостей кінематичного з'єднання з'єднуємо обертальну кінематичну пару 1, 2 і втулку 4 стрічкоподібною кінематичною парою 3. Стрічкоподібна кінематична пара позбавляє втулку 4 можливості обертання навколо осі ОХ. Поворот втулки 4 навколо осі OZ можна нормувати. Щоб задати поворот навколо осі OZ на кут необхідно забезпечити зазор L див. ФІг.2, 4, що визначається по формулі1 L = b*tg(a), (1) де L - зазор необхідний для повороту втулки на кут, [MM]; a - кут повороту втулки [рад]; b - відстань від центра кульового шарніра до центра стрічкоподібної кінематичної пари [мм] див. Фіг.1, 3. Перевіримо розроблене кінематичне з'єднання на наявність надлишкових зв'язків по формулі А. П. Малишева [1] q=W-6n+5p5+4p4+3p3+2p2+Pi, (2) де q - число надлишкових зв'язків; W - рухомість механізму; п - число рухливих ланок; Рб.. Рі - число кінематичних пар 5. 1 класів. Кількість рухливих ланок у кінематичному з'єднанні п=2 (обертальна (вал 1) і кулачком 3 і втулка 4), рухомостей W=2 (обертання навколо осей ОУ, OZ). Pv=1; Рш=1; Ри=1; q=2-6*2+5+3+2=0. З розрахунку випливає, що кінематичне з'єднання не містить надлишкових зв'язків і зайвих рухомостей і є раціональним. Розглянемо кінематичне з'єднання Фіг 3, що дозволяє забезпечити сприятливі умови взаємодії' ланок механізму при дії великих сил і обертаючих моментів у порівнянні з Фіг.1. Кінематичне з'єднання працює в такий спосіб обертаючий момент із вала 1 через кулачок 3 передається на втулку 4 через вкладиші 6 на який розташовані деталі передачі. Вал 1 має можливість обертатися лише навколо осі ОУ. Втулка 4 на кульовому шарнірі 5 може обертатися навколо осей ОХ, ОУ, OZ. Для одержання необхідних властивостей кінематичного з'єднання з'єднуємо обертальну кінематичну пару 1, 2 і втулку 4 з площинною кінематичною парою 3 та обертальною парою 6 Площинна кінематична пара позбавляє втулку 4 можливості обертання навколо осі ОХ. Поворот втулки 4 навколо осі OZ можна нормувати як у першому випадку. Перевіримо розроблене кінематичне з'єднання на наявність надлишкових зв'язків. Кількість рухливих ланок у кінематичному з'єднанні п=3 (обертальна (вал 1) із планкою 3, обертальна 6 (два вкладиші 6) і втулка 4), рухомостей W=2 (обертання навколо осей ОУ, OZ). Pv=2; Рщ=2; q=2-6*3+5*2+3*2=0. З розрахунку випливає, що кінематичне з'єднання не містить надлишкових зв'язків І зайвих рухомостей і є раціональним Використання додаткових кінематичних пар збільшує контактну міцність виробу завдяки більш сприятливому розподілу переданого навантаження в місцях контакту елементів кінематичного з'єднання [1], що дозволяє підвищити надійність механізму, збільшити навантажувальну здатність і стабілізувати ККД на весь термін експлуатації. Джерела інформації: 1. Самоустанавливающиеся механизмы: Справочник/-Л.Н. Решетов-М.1 Машиностроение, 1979-334 с : ил. Фіг. 2 Комп'ютерна верстка В Мацело Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул Урицького, 45, м. Київ, МСП, 03680, Україна ДП 'Український інститут промислової власності", вул Глазунова, 1, м. Київ - 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюKinematic joint
Автори англійськоюSukhanov Dmytro Valentynovych, Marhulis Mykhailo Volldymyrovyh
Назва патенту російськоюКинематическое соединение
Автори російськоюСуханов Дмитрий Валентинович, Маргулис Михаил Владимирович
МПК / Мітки
МПК: F16C 13/02
Мітки: з'єднання, кінематичне
Код посилання
<a href="https://ua.patents.su/2-6060-kinematichne-zehdnannya.html" target="_blank" rel="follow" title="База патентів України">Кінематичне з’єднання</a>
Пристрій для з’єднання співвісно згрупованих сигарет і фільтрів
Номер патенту: 68400
Опубліковано: 16.08.2004
Автори: Озере Філєфф, Кальверак Робер
МПК: A24C 5/00
Мітки: згрупованих, пристрій, сигарет, з'єднання, співвісно, фільтрів
Формула / Реферат:
1. Пристрій для з'єднання співвісно згрупованих сигарет і фільтрів, що має рухому обертальну поверхню, яка утворює разом з опорною обертальною поверхнею обертальний канал для обертання та відповідного перекочування згрупованих комплектів, тобто фільтрів з сигаретними відрізками, і для обгортання останніх у зоні склеювання відрізками паперу, причому на вхідній ділянці обертального каналу розташована стартова планка для примусового й...
Поступальна пара кочення кривошипно-повзунного приводу
Номер патенту: 46279
Опубліковано: 15.05.2002
Автори: Марцінковський Олег Михайлович, Воробйов Микола Степанович
МПК: B30B 1/00
Мітки: кочення, кривошипно-повзунного, приводу, пара, поступальна
Формула / Реферат:
Поступальна пара кочення кривошипно-повзунного приводу, що складається з повзуна і напрямних роликів, яка відрізняється тим, що напрямні ролики виконані різного діаметра, посаджені співвісно та вільно на кожній з двох нерухомих осей стояка перпендикулярно напрямку руху повзуна, схрещені у просторі під кутом a, а на бокових гранях повзуна виконані повздовжні глухі прорізи з можливістю однобічної взаємодії кочення з внутрішньої сторони з...
Основов’язальна машина

Номер патенту: 39814
Опубліковано: 15.06.2001
Автори: Семенюк Микола Федорович, Параска Георгій Борисович, Смутко Світлана Валеріївна
МПК: D04B 23/00, D04B 27/00
Мітки: машина, основов'язальна
Формула / Реферат:
1. Основов'язальна машина, яка включає механізми голок, движків, кінематично зв’язаних з головним валом машини, вушковин та платин, яка відрізняється тим, що приводи петлетвірних органів виконані у вигляді однотипних зубчато-важільних планетарних механізмів. 2. Основов'язальна машина по п. 1, яка відрізняється тим, що сателіти приводів петлетвірних органів виконані з різними радіусами початкових кіл.3. ...
Вузол передачі обертального руху ланцюгового варіатора
Номер патенту: 30855
Опубліковано: 15.08.2002
Автор: Спісак Андрій Владиславович
МПК: F16H 9/02
Мітки: вузол, передачі, ланцюгового, обертального, руху, варіатора
Формула / Реферат:
1. Вузол передачі обертального руху ланцюгового варіатора, що містить корпус, вал, оснащений рухомими у радіальному напрямку з можливістю передачі на вал обертального руху секторами з закріпленими на їх кінцях зубчастими елементами для взаємодії з ролико-втулковим ланцюгом, який відрізняється тим, що вал має два діаметрально протилежні сектори, зубчасті елементи закріплені на секторі через важіль, зубчасті елементи кожного сектора виконані...
Cпосіб передачі обертового руху та регулювання швидкості втулочно-роліковим ланцюгом
Номер патенту: 30855
Опубліковано: 15.12.2000
Автор: Спісак Андрій Владиславович
МПК: F16H 9/02
Мітки: обертового, регулювання, cпосіб, ланцюгом, швидкості, втулочно-роліковим, передачі, руху
Формула / Реферат:
1. Вузол передачі обертального руху ланцюгового варіатора, що містить корпус, вал, оснащений рухомими у радіальному напрямку з можливістю передачі на вал обертального руху секторами з закріпленими на їх кінцях зубчастими елементами для взаємодії з ролико-втулковим ланцюгом, який відрізняється тим, що вал має два діаметрально протилежні сектори, зубчасті елементи закріплені на секторі через важіль, зубчасті елементи кожного сектора виконані...
Попередній патент: Вітровий двигун
Наступний патент: Магніотерапевтичний пристрій мк-1
Випадковий патент: Спосіб одержання біологічно активної композиції