Промисловий робот
Номер патенту: 67181
Опубліковано: 15.06.2004
Автори: Бергер Еміль Григорович, Осадчий Володимир Степанович, Бергер Євгеній Емильович
Формула / Реферат
Промисловий робот, що містить опору, вертикальну і горизонтальну каретки, механічну руку із схватом, виконану у вигляді куліси, і гвинтову пару, гайка якої зв'язана з горизонтальною кареткою, який відрізняється тим, що він обладнаний зв'язаною з горизонтальною кареткою і встановленою в поворотному камені кулісою з профільованим кулачком, який зв'язаний за допомогою штовхача з вертикальною кареткою, при цьому поворотний камінь на важелі, схват на механічній руці і вертикальна каретка на штовхачі виконані переставними з можливістю їхньої фіксації.
Текст
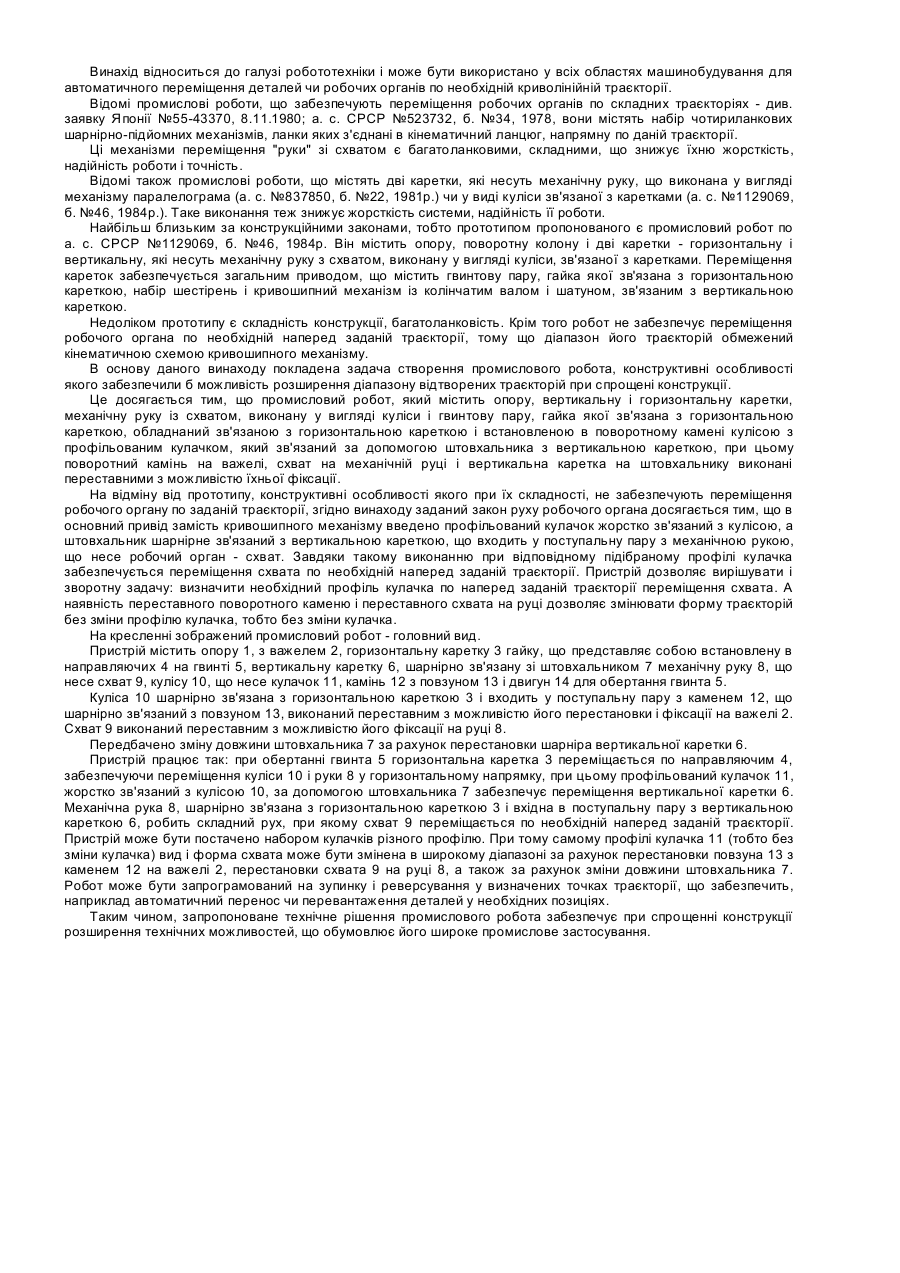
Винахід відноситься до галузі робототехніки і може бути використано у всіх областях машинобудування для автоматичного переміщення деталей чи робочих органів по необхідній криволінійній траєкторії. Відомі промислові роботи, що забезпечують переміщення робочих органів по складних траєкторіях - див. заявку Японії №55-43370, 8.11.1980; а. с. СРСР №523732, б. №34, 1978, вони містять набір чотириланкових шарнірно-підйомних механізмів, ланки яких з'єднані в кінематичний ланцюг, напрямну по даній траєкторії. Ці механізми переміщення "руки" зі схватом є багатоланковими, складними, що знижує їхню жорсткість, надійність роботи і точність. Відомі також промислові роботи, що містять дві каретки, які несуть механічну руку, що виконана у вигляді механізму паралелограма (а. с. №837850, б. №22, 1981р.) чи у виді куліси зв'язаної з каретками (а. с. №1129069, б. №46, 1984р.). Таке виконання теж знижує жорсткість системи, надійність її роботи. Найбільш близьким за конструкційними законами, тобто прототипом пропонованого є промисловий робот по а. с. СРСР №1129069, б. №46, 1984р. Він містить опору, поворотну колону і дві каретки - горизонтальну і вертикальну, які несуть механічну руку з схватом, виконану у вигляді куліси, зв'язаної з каретками. Переміщення кареток забезпечується загальним приводом, що містить гвинтову пару, гайка якої зв'язана з горизонтальною кареткою, набір шестірень і кривошипний механізм із колінчатим валом і шатуном, зв'язаним з вертикальною кареткою. Недоліком прототипу є складність конструкції, багатоланковість. Крім того робот не забезпечує переміщення робочого органа по необхідній наперед заданій траєкторії, тому що діапазон його траєкторій обмежений кінематичною схемою кривошипного механізму. В основу даного винаходу покладена задача створення промислового робота, конструктивні особливості якого забезпечили б можливість розширення діапазону відтворених траєкторій при спрощені конструкції. Це досягається тим, що промисловий робот, який містить опору, вертикальну і горизонтальну каретки, механічну руку із схватом, виконану у вигляді куліси і гвинтову пару, гайка якої зв'язана з горизонтальною кареткою, обладнаний зв'язаною з горизонтальною кареткою і встановленою в поворотному камені кулісою з профільованим кулачком, який зв'язаний за допомогою штовхальника з вертикальною кареткою, при цьому поворотний камінь на важелі, схват на механічній руці і вертикальна каретка на штовхальнику виконані переставними з можливістю їхньої фіксації. На відміну від прототипу, конструктивні особливості якого при їх складності, не забезпечують переміщення робочого органу по заданій траєкторії, згідно винаходу заданий закон руху робочого органа досягається тим, що в основний привід замість кривошипного механізму введено профільований кулачок жорстко зв'язаний з кулісою, а штовхальник шарнірне зв'язаний з вертикальною кареткою, що входить у поступальну пару з механічною рукою, що несе робочий орган - схват. Завдяки такому виконанню при відповідному підібраному профілі кулачка забезпечується переміщення схвата по необхідній наперед заданій траєкторії. Пристрій дозволяє вирішувати і зворотну задачу: визначити необхідний профіль кулачка по наперед заданій траєкторії переміщення схвата. А наявність переставного поворотного каменю і переставного схвата на руці дозволяє змінювати форму траєкторій без зміни профілю кулачка, тобто без зміни кулачка. На кресленні зображений промисловий робот - головний вид. Пристрій містить опору 1, з важелем 2, горизонтальну каретку 3 гайку, що представляє собою встановлену в направляючих 4 на гвинті 5, вертикальну каретку 6, шарнірно зв'язану зі штовхальником 7 механічну руку 8, що несе схват 9, кулісу 10, що несе кулачок 11, камінь 12 з повзуном 13 і двигун 14 для обертання гвинта 5. Куліса 10 шарнірно зв'язана з горизонтальною кареткою 3 і входить у поступальну пару з каменем 12, що шарнірно зв'язаний з повзуном 13, виконаний переставним з можливістю його перестановки і фіксації на важелі 2. Схват 9 виконаний переставним з можливістю його фіксації на руці 8. Передбачено зміну довжини штовхальника 7 за рахунок перестановки шарніра вертикальної каретки 6. Пристрій працює так: при обертанні гвинта 5 горизонтальна каретка 3 переміщається по направляючим 4, забезпечуючи переміщення куліси 10 і руки 8 у горизонтальному напрямку, при цьому профільований кулачок 11, жорстко зв'язаний з кулісою 10, за допомогою штовхальника 7 забезпечує переміщення вертикальної каретки 6. Механічна рука 8, шарнірно зв'язана з горизонтальною кареткою 3 і вхідна в поступальну пару з вертикальною кареткою 6, робить складний рух, при якому схват 9 переміщається по необхідній наперед заданій траєкторії. Пристрій може бути постачено набором кулачків різного профілю. При тому самому профілі кулачка 11 (тобто без зміни кулачка) вид і форма схвата може бути змінена в широкому діапазоні за рахунок перестановки повзуна 13 з каменем 12 на важелі 2, перестановки схвата 9 на руці 8, а також за рахунок зміни довжини штовхальника 7. Робот може бути запрограмований на зупинку і реверсування у визначених точках траєкторії, що забезпечить, наприклад автоматичний перенос чи перевантаження деталей у необхідних позиціях. Таким чином, запропоноване технічне рішення промислового робота забезпечує при спрощенні конструкції розширення технічних можливостей, що обумовлює його широке промислове застосування.
ДивитисяДодаткова інформація
Назва патенту англійськоюIndustrial robot
Автори англійськоюBerher Emil Hryhorovych
Назва патенту російськоюПромышленный робот
Автори російськоюБергер Эмиль Григорьевич
МПК / Мітки
МПК: B25J 11/00
Мітки: промисловий, робот
Код посилання
<a href="https://ua.patents.su/2-67181-promislovijj-robot.html" target="_blank" rel="follow" title="База патентів України">Промисловий робот</a>
Промисловий робот
Номер патенту: 24123
Опубліковано: 31.08.1998
Автор: Баньковський Петро Андрійович
МПК: B25J 1/00
Мітки: промисловий, робот
Формула / Реферат:
Промышленный робот, содержащий руку, состоящую из платформ треугольной формы, каждая из которых связана с соседней платформой посредством трех приводов линейного перемещения, шарнирно установленных на этих платформах, а также расположенный на крайней платформе руки схват, в корпусе которого установлен привод перемещения его губок, отличающийся тем, что, с целью расширения технологических возможностей за счет увеличения рабочей зоны,...
Промисловий робот
Номер патенту: 27488
Опубліковано: 15.09.2000
Автор: Малетті Енріко
МПК: B25J 9/10, B21D 43/04
Мітки: робот, промисловий
Текст:
...на нём два двигателя с понижающими передачами, соединённые с ними два манипулятора с возможностью вращения вокруг первой и второй осей, причём оси параллельны и расположены на расстоянии одна от другой, два предплечья, шарнирно сочленённые одними концами с манипуляторами с возможностью вращения вокруг третьей и четвёртой осей, параллельных первой и второй осям вращения манипуляторов, и шарнирно сочленённые противоположными концами с...
Промисловий пиловсмоктувач

Номер патенту: 60038
Опубліковано: 15.09.2003
Автори: Батлук Василь Кирилович, БАТЛУК ВІКТОРІЯ АРСЕНІЇВНА
МПК: B01D 45/00, B04C 1/00
Мітки: пиловсмоктувач, промисловий
Формула / Реферат:
Спосіб очищення відхідних газів котельних текстильних підприємств, що включає їх нейтралізацію, який відрізняється тим, що кислу (рН=5) газоповітряну суміш котельних текстильних підприємств, яка вміщує такі небезпечні інгредієнти, як SO2, СО2, сажу, абсорбують лужними стічними водами (рН=10-12) до приведення концентрацій цих сполук, до допустимих норм, а стічні води при цьому повністю знебарвлюються.
Мисливсько- промисловий карабін

Номер патенту: 33124
Опубліковано: 15.02.2001
Автори: Шейко Володимир Олександрович, Ломакін Володимир Володимирович, Комаров Володимир Олександрович, Жарков Анатолій Володимирович, Анатольєв Анатолій Анатолійович
МПК: F41G 1/00, F41C 23/00, F41C 7/00
Мітки: мисливської, карабін, промисловий
Текст:
...рамз 12 із гззовнм поршнем 13 і ручкою заряджений 14, і зворотня пружина 15, шо контактує одним кінцем із затворною рзмокї 12. £ іншим - із торцевою частиною ствольної коробки 2 Затворна рамз 12 виконана з можливістю зворотно-поступэльногс pv x v '/здовж ствольно! коробки 2 Відвід ЧЭСТИНЙ ГаГїІЙ ^ППіі^НЗМРЇИИ^ ЛПЯ ПЙПЄГїаПЙД"йСаНИЯ ГїЬПОії УЛ КЛНЗПУ (позицій 1) ствола 1 здійснюється через отвір (позицій II) у каналі а І за попомогою...
Промисловий пристрій для тралового лову
Номер патенту: 65640
Опубліковано: 15.04.2004
Автор: Середа Володимир Григорович
МПК: A01K 73/00
Мітки: промисловий, лову, тралового, пристрій
Формула / Реферат:
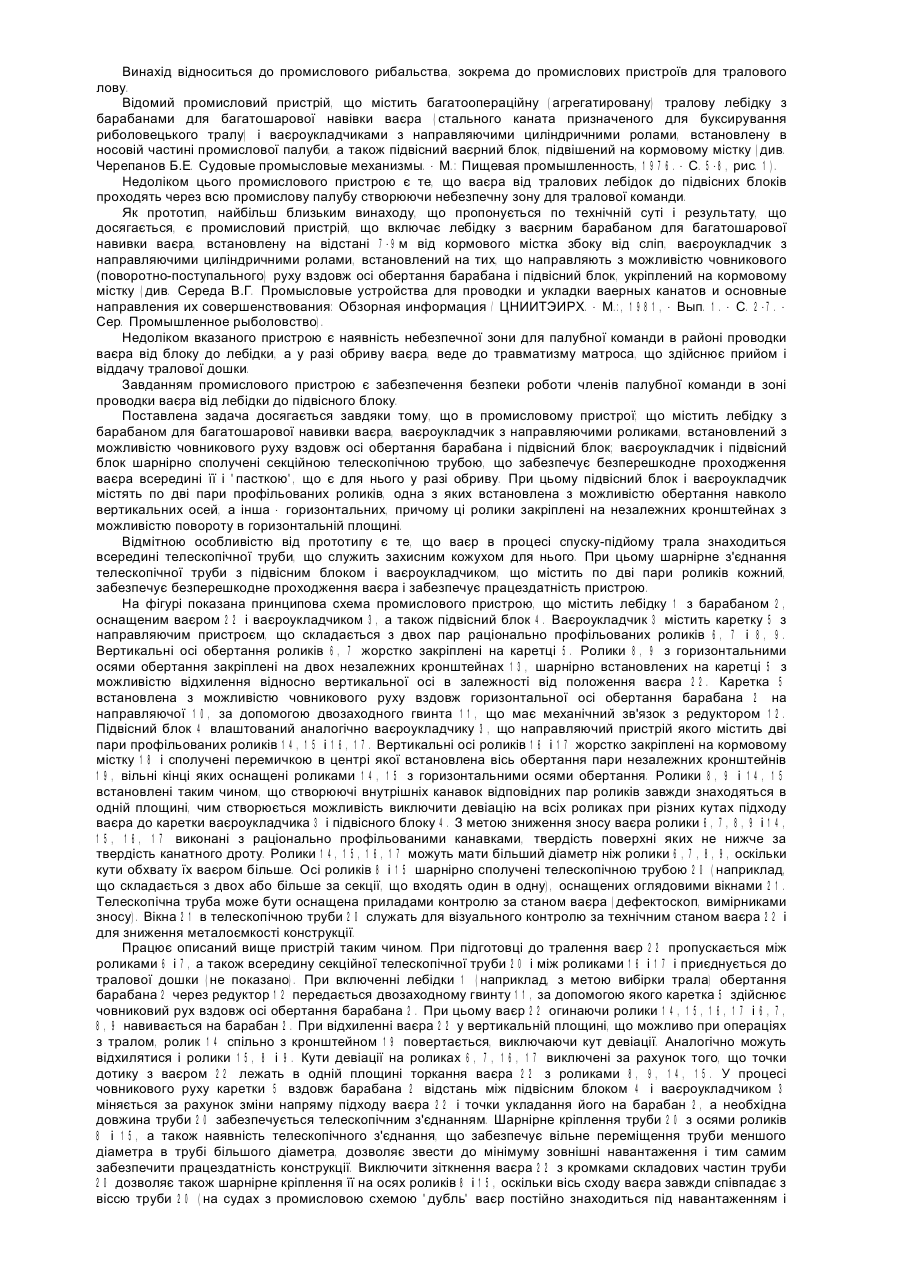
Промисловий пристрій для тралового лову, що включає лебідку з барабаном для багатошарової навивки ваєра, ваєроукладач з направляючими роликами, встановлений з можливістю човникового руху вздовж осі обертання барабана, і підвісний блок, який відрізняється тим, що ваєроукладач і підвісний блок, кожний з яких містить по дві пари роликів, шарнірно сполучені секційною телескопічною трубою, з можливістю безперешкодного проходження ваєра всередині...
Попередній патент: Пристрій для очистки і утилізації тепла відхідних газів
Наступний патент: Спосіб виконання стегново-підколінного артеріального шунтування
Випадковий патент: Спосіб виготовлення ковбасних виробів з низьким вмістом жиру