Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм в.п. сабліна

Формула / Реферат
1. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм, що містить підставу й кінематичний ланцюг, що містить структурні групи ланок, кожна з яких містить щонайменше дві рухливі ланки, що утворюють між собою щонайменше одну обертальну кінематичну пару першого роду і щонайменше одну зовнішню обертальну кінематичну пару першого роду з підставою, причому осі обертання вказаних обертальних кінематичних пар першого роду паралельні між собою, при цьому осі обертання обертальних кінематичних пар першого роду щонайменше двох структурних груп ланок розташовані під кутом одна до одної, а щонайменше два важелі щонайменше двох структурних груп ланок зв'язані між собою щонайменше безпосередньо й принаймні безпосередньо й через групу проміжних ланок, який відрізняється тим, що його кінематичний ланцюг містить щонайменше три плоскі структурні групи ланок, з яких щонайменше дві плоскі структурні групи ланок утворюють між собою плоску симетричну групу ланок, при цьому площина розташування ланок щонайменше однієї іншої структурної групи ланок, осі обертання обертальних кінематичних пар першого роду яких розташовані під кутом до осей обертання обертальних кінематичних пар першого роду симетричної групи рухливих ланок, проходить через вісь симетрії групи рухливих ланок або паралельна вказаній осі симетрії.
2. Механізм за п. 1, який відрізняється тим, що безпосередній зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок виконано у вигляді дворухливого сферичного шарніра з пальцем на одній сферичній поверхні й круговим пазом на іншій сферичній поверхні.
3. Механізм за п. 1, який відрізняється тим, що безпосередній зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок виконано у вигляді трирухливого сферичного шарніра.
4. Механізм за п. 1, який відрізняється тим, що зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок через проміжну ланку виконано у вигляді двошарнірного з'єднання із проміжною ланкою, наприклад, у вигляді шарніра Гука.
5. Механізм за п. 1, який відрізняється тим, що кут між площиною розташування плоскої симетричної групи рухливих ланок й площиною розташування щонайменше однієї іншої структурної групи ланок виконано прямим.
6. Механізм за п. 1, який відрізняється тим, що кут між площиною розташування плоскої симетричної групи рухливих ланок й площиною розташування щонайменше однієї іншої структурної групи ланок виконано відмінним від прямого.
7. Механізм за п. 1, який відрізняється тим, що зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок, що утворюють плоску симетричну групу рухливих ланок, виконана через проміжну ланку, при цьому щонайменше одна плоска рухлива структурна група ланок вказаної плоскої симетричної групи ланок зміщена плоско-паралельно відносно напрямку переміщення проміжної ланки в площині розташування вказаної плоскої симетричної групи ланок або в площині, що паралельна площині розташування вказаної плоскої симетричної групи ланок.
8. Механізм за п. 1, який відрізняється тим, що його кінематичний ланцюг містить, щонайменше чотири плоскі структурні групи ланок, при цьому вони попарно утворюють щонайменше одну пару плоских симетричних груп рухливих ланок, які розташовані у пересічних площинах.
Текст
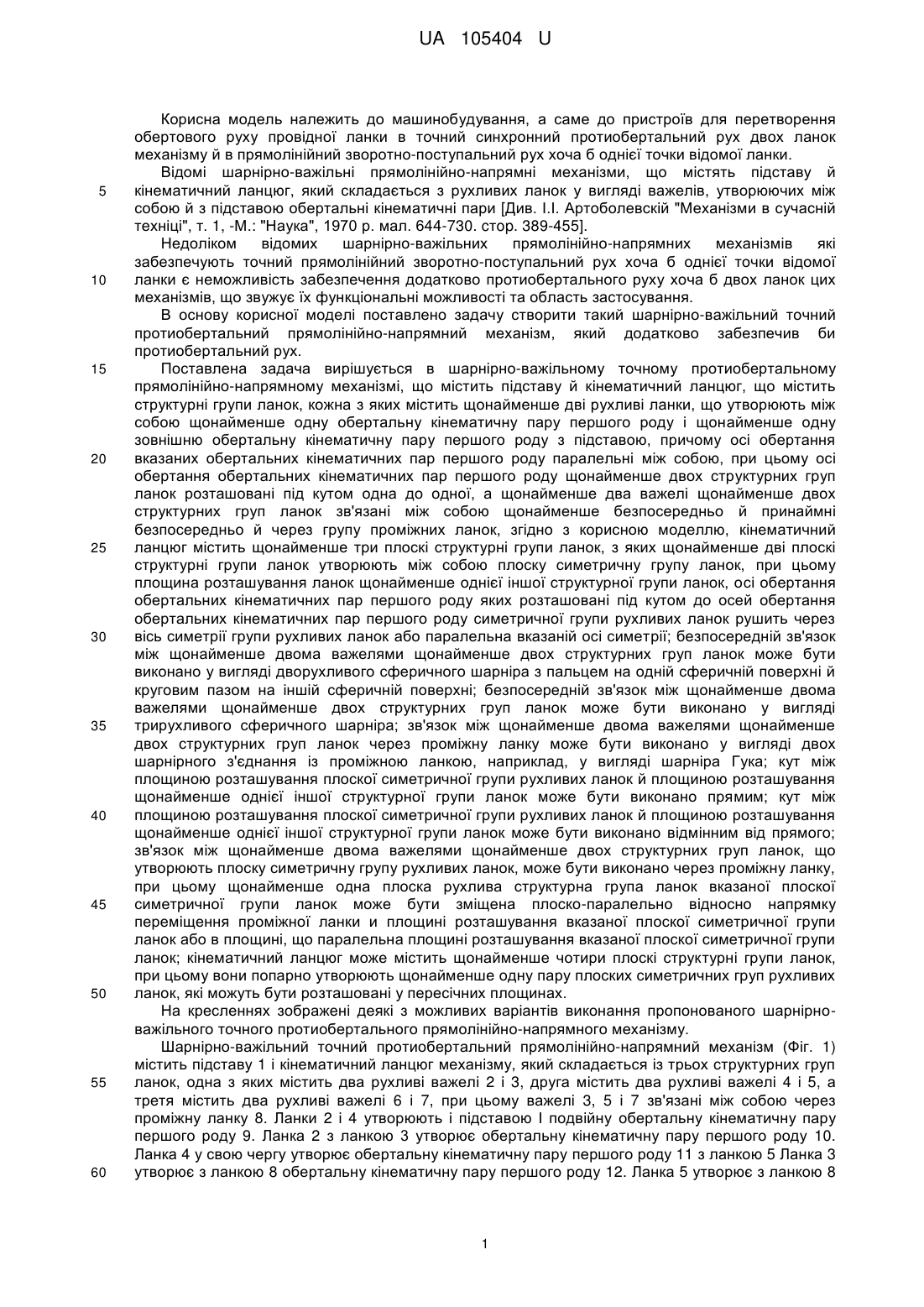
Реферат: UA 105404 U UA 105404 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до машинобудування, а саме до пристроїв для перетворення обертового руху провідної ланки в точний синхронний протиобертальний рух двох ланок механізму й в прямолінійний зворотно-поступальний рух хоча б однієї точки відомої ланки. Відомі шарнірно-важільні прямолінійно-напрямні механізми, що містять підставу й кінематичний ланцюг, який складається з рухливих ланок у вигляді важелів, утворюючих між собою й з підставою обертальні кінематичні пари [Див. І.І. Артоболевскій "Механізми в сучасній техніці", т. 1, -М.: "Наука", 1970 р. мал. 644-730. cтop. 389-455]. Недоліком відомих шарнірно-важільних прямолінійно-напрямних механізмів які забезпечують точний прямолінійний зворотно-поступальний рух хоча б однієї точки відомої ланки є неможливість забезпечення додатково протиобертального руху хоча б двох ланок цих механізмів, що звужує їх функціональні можливості та область застосування. В основу корисної моделі поставлено задачу створити такий шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм, який додатково забезпечив би протиобертальний рух. Поставлена задача вирішується в шарнірно-важільному точному протиобертальному прямолінійно-напрямному механізмі, що містить підставу й кінематичний ланцюг, що містить структурні групи ланок, кожна з яких містить щонайменше дві рухливі ланки, що утворюють між собою щонайменше одну обертальну кінематичну пару першого роду і щонайменше одну зовнішню обертальну кінематичну пару першого роду з підставою, причому осі обертання вказаних обертальних кінематичних пар першого роду паралельні між собою, при цьому осі обертання обертальних кінематичних пар першого роду щонайменше двох структурних груп ланок розташовані під кутом одна до одної, а щонайменше два важелі щонайменше двох структурних груп ланок зв'язані між собою щонайменше безпосередньо й принаймні безпосередньо й через групу проміжних ланок, згідно з корисною моделлю, кінематичний ланцюг містить щонайменше три плоскі структурні групи ланок, з яких щонайменше дві плоскі структурні групи ланок утворюють між собою плоску симетричну групу ланок, при цьому площина розташування ланок щонайменше однієї іншої структурної групи ланок, осі обертання обертальних кінематичних пар першого роду яких розташовані під кутом до осей обертання обертальних кінематичних пар першого роду симетричної групи рухливих ланок рушить через вісь симетрії групи рухливих ланок або паралельна вказаній осі симетрії; безпосередній зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок може бути виконано у вигляді дворухливого сферичного шарніра з пальцем на одній сферичній поверхні й круговим пазом на іншій сферичній поверхні; безпосередній зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок може бути виконано у вигляді трирухливого сферичного шарніра; зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок через проміжну ланку може бути виконано у вигляді двох шарнірного з'єднання із проміжною ланкою, наприклад, у вигляді шарніра Гука; кут між площиною розташування плоскої симетричної групи рухливих ланок й площиною розташування щонайменше однієї іншої структурної групи ланок може бути виконано прямим; кут між площиною розташування плоскої симетричної групи рухливих ланок й площиною розташування щонайменше однієї іншої структурної групи ланок може бути виконано відмінним від прямого; зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок, що утворюють плоску симетричну групу рухливих ланок, може бути виконано через проміжну ланку, при цьому щонайменше одна плоска рухлива структурна група ланок вказаної плоскої симетричної групи ланок може бути зміщена плоско-паралельно відносно напрямку переміщення проміжної ланки и площині розташування вказаної плоскої симетричної групи ланок або в площині, що паралельна площині розташування вказаної плоскої симетричної групи ланок; кінематичний ланцюг може містить щонайменше чотири плоскі структурні групи ланок, при цьому вони попарно утворюють щонайменше одну пару плоских симетричних груп рухливих ланок, які можуть бути розташовані у пересічних площинах. На кресленнях зображені деякі з можливих варіантів виконання пропонованого шарнірноважільного точного протиобертального прямолінійно-напрямного механізму. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 1) містить підставу 1 і кінематичний ланцюг механізму, який складається із трьох структурних груп ланок, одна з яких містить два рухливі важелі 2 і 3, друга містить два рухливі важелі 4 і 5, а третя містить два рухливі важелі 6 і 7, при цьому важелі 3, 5 і 7 зв'язані між собою через проміжну ланку 8. Ланки 2 і 4 утворюють і підставою І подвійну обертальну кінематичну пару першого роду 9. Ланка 2 з ланкою 3 утворює обертальну кінематичну пару першого роду 10. Ланка 4 у свою чергу утворює обертальну кінематичну пару першого роду 11 з ланкою 5 Ланка 3 утворює з ланкою 8 обертальну кінематичну пару першого роду 12. Ланка 5 утворює з ланкою 8 1 UA 105404 U 5 10 15 20 25 30 35 40 45 50 55 60 обертальну кінематичну пару першого роду 13. При цьому осі обертання обертальних кінематичних пар першого роду 9-13 паралельні між собою. Ланка 6 утворює з підставою 1 обертальну кінематичну пару першого роду 14, а з ланкою 7 утворює обертальну кінематичну пару першого роду 15. Ланка 7 утворює з ланкою 8 обертальну кінематичну пару першого роду 16. При цьому осі обертання обертальних кінематичних пар першого роду 14-16 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 9-13. Ланки 2-5 утворюють плоску симетричну групу рухливих ланок з площиною симетрії а-а. Ланка 7 розташована у площині симетрії. Ланка 6 розташована паралельно площині симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 2) містить підставу 17 і кінематичний ланцюг механізму, який складається із трьох структурних груп ланок, одна з яких містить два рухливі важелі 18 і 19, друга містить два рухливі важелі 20 і 21, а третя містить два рухливі важелі 22 і 23, при цьому важелі 19, 21 і 23 зв'язані між собою через проміжну ланку 24. Ланка 18 утворює з підставою 17 обертальну кінематичну пару першого роду 25, а з ланкою 19 утворює обертальну кінематичну пару першого роду 26. Ланка 19 утворює з ланкою 24 дворухливий сферичний шарнір з пальцем і коловим пазом 27. Ланка 20 утворює з підставою 17 обертальну кінематичну пару першого роду 28, а з ланкою 21 утворює обертальну кінематичну пару першого роду 29. Ланка 21 утворює з ланкою 21 дворухливий сферичний шарнір з пальцем і коловим пазом 30. При цьому осі обертання обертальних кінематичних пар першого роду 25, 26, 28 і 29 паралельні між собою. Ланка 22 утворює з підставою 17 обертальну кінематичну пару першого роду 31, а з ланкою 23 утворює обертальну кінематичну пару першого роду 32. Ланка 23 утворює з ланкою 24 обертальну кінематичну пару першого роду 33. При цьому осі обертання обертальних кінематичних пар першого роду 31-33 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 25, 26, 27 і 29. Ланки 18-21 утворюють плоску симетричну групу рухливих ланок з площиною симетрії б-б. Ланка 23 розташована у площині симетрії. Ланка 22 розташована паралельно площині симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 3) містить підставу 34 і кінематичний ланцюг механізму, який складається із трьох структурних груп ланок, одна з яких містить два рухливі важелі 35 і 36, друга містить два рухливі важелі 37 і 38, а третя містить два рухливі важелі 39 і 39а, при цьому важелі 36, 38 і 39а зв'язані між собою через проміжну ланку 40. Ланки 35 і 37 утворюють з підставою 34 подвійну обертальну кінематичну пару першого роду 41. Ланка 35 з ланкою 36 утворює обертальну кінематичну пару першого роду 42. Ланка 36 утворює з ланкою 40 трихрухливий сферичний шарнір 43. Ланка 37 з ланкою 38 утворює обертальну кінематичну пару першого роду 44. Ланка 38 утворює з ланкою 40 трирухливий сферичний шарнір 45. При цьому осі обертання обертальних кінематичних пар першого роду 41-44 паралельні між собою. Ланка 39 утворює з підставою 34 обертальну кінематичну пару першого роду 46, а з ланкою 39а утворює обертальну кінематичну пару першого роду 47. Ланка 39а утворює з ланкою 40 обертальну кінематичну пару першого роду 48. При цьому осі обертання обертальних кінематичних пар першого роду 46-48 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 41-44. Ланки 35-38 утворюють плоску симетричну групу рухливих ланок з площиною симетрії в-в. Ланка 39а розташована у площині симетрії. Ланка 39 розташована паралельно площині симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 4) містить підставу 49 і кінематичний ланцюг механізму, який складається із трьох структурних груп ланок, одна з яких містить два рухливі важелі 50 і 51, друга містить два рухливі важелі 52 і 53, а третя містить два рухливі важелі 54 і 55, при цьому важелі 51, 53 і 55 зв'язані між собою через проміжну ланку 56. Ланки 50 і 52 утворюють з підставою 49 подвійну обертальну кінематичну пару першого роду 57. Ланка 50 з ланкою 51 утворює обертальну кінематичну пару першого роду 58. Ланка 51 у свою чергу утворює обертальну кінематичну пару першого роду 59 з ланкою 56. Ланка 52 утворює з ланкою 53 обертальну кінематичну пару першого роду 60. Ланка 53 утворює з ланкою 56 обертальну кінематичну пару першого роду 61. При цьому осі обертання обертальних кінематичних пар першого роду 57-61 паралельні між собою. Ланка 54 утворює з підставою 49 обертальну кінематичну пару першого роду 62, а з ланкою 55 утворює обертальну кінематичну пару першого роду 63. Ланка 55 утворює з ланкою 56 обертальну кінематичну пару першого роду 64. При цьому осі обертання обертальних кінематичних пар першого роду 62-64 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першою роду 57-61. Ланки 50-53 утворюють плоску симетричну групу рухливих ланок з площиною симетрії г-г. Ланка 55 розташована у площині симетрії. Ланка 54 розташована паралельно площині симетрії. 2 UA 105404 U 5 10 15 20 25 30 35 40 45 50 55 60 Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 5) містить підставу 65 і кінематичний ланцюг механізму, який складається із трьох структурних груп ланок, одна з яких містить два рухливі важелі 66 і 67, друга містить два рухливі важелі 68 і 69, а третя містить два рухливі важелі 70 і 71, при цьому важелі 67, 69 і 71 зв'язані між собою за допомогою проміжної ланки 72. Ланка 66 утворює з підставою 65 обертальну кінематичну пару першою роду 73. а з ланкою 67 утворює обертальну кінематичну пару першого роду 74. Ланка 67 утворює з ланкою 72 дворухливий сферичний шарнір з пальцем і круговим пазом 75. Ланка 68 утворює з підставою 65 обертальну кінематичну пару першого роду 76, а з ланкою 69 утворює обертальну кінематичну пару першого роду 77. Ланка 69 утворює з ланкою 11 дворухливий сферичний шарнір з пальцем і круговим пазом 78. При цьому осі обертання обертальних кінематичних пар першого роду 73, 74, 76 і 77 паралельні між собою. Ланка 70 утворює з підставою 65 обертальну кінематичну пару першого роду 79, а з ланкою 71 утворює обертальну кінематичну пару першого роду 80. Ланка 71 утворює з ланкою 72 обертальну кінематичну пару першого роду 81. При цьому осі обертання обертальних кінематичних пар першого роду 79-81 паралельні між собою її перпендикулярні осям обертання обертальних кінематичних пар першого роду 73, 74, 76 і 77. Ланки 66-69 утворюють плоску симетричну групу рухливих ланок із площиною симетрії д-д. Ланка 71 розташована в площині симетрії. Ланка 70 розташована паралельно площині симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 6) містить підставу 82 і кінематичний ланцюг механізму, який складається із чотирьох структурних груп ланок, одна з яких містить два рухливі важелі 83 і 84, друга містить два рухливі важелі 85 і 86, третя містить два рухливі важелі 87 і 88, а четверта містить два рухливі важелі 90 і 91, при цьому важелі 84, 86, 88 і 91 зв'язані між собою за допомогою проміжної ланки 89. Ланки 83 і 85 утворюють із підставою 82 подвійну обертальну кінематичну пару першого роду 92. Ланка 83 з ланкою 84 утворює обертальну кінематичну пару першого роду 93. Ланка 85 у свою чергу утворює обертальну кінематичну пару першого роду 95 з ланкою 86. Ланка 84 утворює з ланкою 89 трирухливий сферичний шарнір 94. Ланка 86 утворює з ланкою 89 трирухливий сферичний шарнір 96. При цьому осі обертання обертальних кінематичних пар першого роду 92, 93 і 95 паралельні між собою. Ланка 87 утворює з підставою 82 обертальну кінематичну пару першого роду 97, а з ланкою 88 утворює обертальну кінематичну пару першого роду 98. Ланка 88 утворює з ланкою 89 обертальну кінематичну пару першого роду 99. Ланка 90 утворює з підставою 82 обертальну кінематичну пару першого роду 100, а з ланкою 91 утворює обертальну кінематичну пару першого роду 101. Ланка 91 утворює з ланкою 89 обертальну кінематичну пару першого роду 102. При цьому осі обертання обертальних кінематичних пар першого роду 97-102 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 92, 93 і 95. Ланки 83-86 утворюють плоску симетричну групу рухливих ланок із площиною симетрії е-е. Ланка 88 розташована в площині симетрії. Ланки 87, 90 і 91 розташовані паралельно площині симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 7) містить підставу 103 і кінематичний ланцюг механізму, який складається із трьох структурних груп ланок, одна з яких містить два рухливі важелі 104 і 105, друга містить два рухливі важелі 106 і 107, а третя містить два рухливі важелі 108 і 109, при цьому важелі 105, 107 і 109 зв'язані між собою через проміжну ланку 110 у вигляді хрестовини шарніра Гука. Ланки 104 і 106 утворюють із підставою 103 подвійну обертальну кінематичну пару першого роду 111. Ланка 104 з ланкою 105 утворює обертальну кінематичну пару першого роду 112. Ланка 106 у свою чергу утворює обертальну кінематичну пару першого роду 114 з ланкою 107. Ланки 105 і 107 утворюють із ланкою 110 подвійну обертальну кінематичну пару першого роду 113. При цьому осі обертання обертальних кінематичних пар першого роду 111-114 паралельні між собою. Ланка 108 утворює з підставою 103 обертальну кінематичну пару першого роду 115, а з ланкою 109 утворює обертальну кінематичну пару першого роду 116. Ланка 109 утворює з ланкою 110 обертальну кінематичну пару першого роду 117. При цьому осі обертання обертальних кінематичних пар першого роду 115-117 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 111-114. Ланки 104-107 утворюють плоску симетричну групу рухливих ланок із площиною симетрії ж-ж. Ланка 109 розташована в площині симетрії. Ланка 108 розташована паралельно площини симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 8) містить підставу 118 і кінематичний ланцюг механізму, який складається із трьох структурних груп ланок, одна з яких містить два рухливі важелі 119 і 120, друга містить два рухливі важелі 121 і 122, а третя містить два рухливі важелі 123 і 124, при цьому важелі 120, 122 і 124 зв'язані між собою безпосередньо. Ланка 119 утворює з підставою 118 обертальну кінематичну пару 3 UA 105404 U 5 10 15 20 25 30 35 40 45 50 55 60 першого роду 125, а з ланкою 120 утворює обертальну кінематичну пару першого роду 126. Ланка 120 утворює з ланками 122 і 124 подвійний дворухливий сферичний шарнір з пальцем і круговим пазом 127. Ланка 121 утворює з підставою 118 обертальну кінематичну пару першого роду 128, а з ланкою 122 утворює обертальну кінематичну пару першого роду 129. При цьому осі обертання обертальних кінематичних пар першого роду 125, 126, 128 і 129 паралельні між собою. Ланка 123 утворює з підставою 118 обертальну кінематичну пару першого роду 130, а з ланкою 124 утворює обертальну кінематичну пару першого роду 131. При цьому осі обертання обертальних кінематичних пар першого роду 130 і 131 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 125, 126, 128 і 129. Ланки 119-122 утворюють плоску симетричну групу рухливих ланок із площиною симетрії з-з. Ланка 124 розташована в площині симетрії. Ланка 124 розташована паралельно площини симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 9) містить підставу 132 і кінематичний ланцюг механізму, який складається із трьох структурних груп ланок, одна з яких містить два рухливі важелі 133 і 134, друга містить два рухливі важелі 135 і 136, а третя містить два рухливі важелі 137 і 138, при цьому важелі 134, 136 і 138 зв'язані між собою безпосередньо. Ланки 133 і 135 утворюють із підставою 132 подвійну обертальну кінематичну пару першого роду 139. Ланка 133 з ланкою 134 утворює обертальну кінематичну пару першого роду 140. Ланка 135 у свою чергу утворює обертальну кінематичну пару першого роду 142 з ланкою 136. Ланки 134 і 136 утворюють із ланкою 138 подвійний трирухомий сферичний шарнір 141. При цьому осі обертання обертальних кінематичних пар першого роду 139, 140 і 142 паралельні між собою. Ланка 137 утворює з підставою 132 обертальну кінематичну пару першого роду 143, а з ланкою 138 утворює обертальну кінематичну пару першого роду 144. При цьому осі обертання обертальних кінематичних пар першого роду 143 і 144 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 139, 140 і 142. Ланки 133-136 утворюють плоску симетричну групу рухливих ланок із площиною симетрії. Ланка 138 розташована в площині симетрії. Ланка 137 розташована паралельно площини симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 10) містить підставу 145 і кінематичний ланцюг механізму, який складається із чотирьох структурних груп ланок, одна з яких містить два рухливі важелі 146 і 147, друга містить два рухливі важелі 148 і 149, третя містить два рухливі важелі 150 і 151, а четверта містить два рухливі важелі 152 і 153, при цьому важелі 150, 151 і 153 зв'язані між собою через проміжну ланку 154 у вигляді хрестовини. Ланки 146 і 147 утворюють із підставою 145 подвійну обертальну кінематичну пару першого роду 155, ланка 146 з ланкою 147 утворює обертальну кінематичну пару першого роду 156. Ланка 148 утворює обертальну кінематичну пару першого роду 157 з ланкою 149. Ланка 147 у свою чергу утворюють обертальну кінематичну пару першого роду 158 з ланкою 149. Ланку 149 утворюють обертальну кінематичну пару першого роду 159 з ланкою 150, а ланка 147 утворює обертальну кінематичну пару першого роду 160 з ланкою 151. Ланки 150 і 151 утворюють між собою й із хрестовиною 154 подвійну обертальну кінематичну пару першого роду 170. При цьому осі обертання обертальних кінематичних пар першого роду 155-160 і 170 паралельні між собою. Ланка 152 утворює з підставою 145 обертальну кінематичну пару першого роду 171, а з ланкою 153 утворює обертальну кінематичну пару першого роду 172. Ланка 153 у свою чергу утворює обертальну кінематичну пару першого роду 173 із хрестовиною 154. При цьому осі обертання обертальних кінематичних пар першого роду 171-173 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першою роду 155 160 і 170. Ланки 146-151 утворюють плоску симетричну групу рухливих ланок із площиною симетрії до-до. Ланка 153 розташована в площині симетрії. Ланка 152 розташована паралельно площині симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 11) містить підставу 174 і кінематичний ланцюг механізму, який складається із чотирьох структурних груп ланок, одна з яких містить два рухливі важелі 175 і 176, друга містить два рухливі важелі 177 і 178, третя містить два рухливі важелі 179 і 180, а четверта містить два рухливі важелі 181 і 182, при цьому важелі 179, 180 і 182 зв'язані між собою через проміжну ланку 183 у вигляді хрестовини. Ланки 175 і 176 утворюють подвійну обертальну кінематичну пару першого роду 184 з підставою 174, ланка 177 з ланкою 178 утворює обертальну кінематичну пару першого роду 185. Ланка 176 утворює обертальну кінематичну пару першого роду 188 з ланкою 179. Ланка 175 утворює обертальну кінематичну пару першого роду 189 з ланкою 180. Ланки 179 і 180 у свою чергу утворюють подвійну обертальну кінематичну пару першою роду 190 із хрестовиною 183. При цьому осі обертання обертальних кінематичних пар першого роду 184190 паралельні між собою. Ланка 181 утворює з підставою 174 обертальну кінематичну пару 4 UA 105404 U 5 10 15 20 25 30 35 40 45 50 55 60 першого роду 191, а з ланкою 182 утворює обертальну кінематичну пару першого роду 192. Ланка 182 у свою чергу утворює обертальну кінематичну пару першого роду 193 із хрестовиною 183. При цьому осі обертання обертальних кінематичних пар першого роду 191-193 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 184190. Ланки 175-180 утворюють плоску симетричну групу рухливих ланок із площиною симетрії лл. Ланка 182 розташоване в площині симетрії. Ланка 181 розташоване паралельно площині симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 12) містить підставу 194 і кінематичний ланцюг механізму, який складається із чотирьох структурних груп ланок, одна з яких містить два рухливі важелі 195 і 196, друга містить два рухливі важелі 197 і 198, третя містить два рухливі важелі 199 і 200, а четверта містить два рухливі важелі 201 і 202, при цьому важелі 199, 200 і 202 зв'язані між собою через проміжну ланку 203 у вигляді хрестовини. Ланки 195 і 196 утворюють подвійну обертальну кінематичну пару першого роду 204 підставою 194, ланка 197 з ланкою 198 утворює обертальну кінематичну пару першого роду 205. Ланка 195 утворює обертальну кінематичну пару першого роду 206 з ланкою 197. Ланки 196 і 198 у свою чергу утворююють, обертальну кінематичну пару першого роду 207, а також ланка 197 утворює обертальну кінематичну пару першого роду 208 з ланкою 199. Ланка 198 утворює обертальну кінематичну пару першого роду 209 з ланкою 200. Ланки 199 і 200 утворюють між собою й із хрестовиною 203 подвійну обертальну кінематичну пару першого роду 210. При цьому осі обертання обертальних кінематичних пар першого роду 204-210 паралельні між собою. Ланка 201 утворює з підставою 194 обертальну кінематичну пару першого роду 211, а з ланкою 202 утворює обертальну кінематичну пару першого роду 212. Ланка 202 у свою чергу утворює обертальну кінематичну пиру першого роду 213 із хрестовиною 203. При цьому осі обертання обертальних кінематичних пар першого роду 211-213 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 204210. Ланки 195-200 утворюють плоску симетричну групу рухливих ланок із площиною симетрії м-м. Ланка 202 розташована в площині симетрії. Ланка 201 розташована паралельно площині симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 13) містить, підставу 214 і кінематичний ланцюг механізму, який складається з п'яти структурних груп ланок, одна з яких містить два рухливі важелі 215 і 216, друга містить два рухливі важелі 217 і 218, третя містить два рухливі важелі 219 і 220, четверта містить два рухливі важелі 221 і 222,а п'ята містить два рухливі важелі223 і 224, при цьому важелі 216, 218, 220 і 222 зв'язані між собою через проміжну ланку 225 у вигляді хрестовини шарніра Гука. Ланки 215, 217, 219 і 221 утворюють із підставою 214 четверту обертальну кінематичну пару першого роду 226. Ланка 215 з ланкою 216 утворює обертальну кінематичну пару першого роду 227. Ланка 217 у свою чергу утворює обертальну кінематичну пару першого роду 228 з ланкою 218. Ланка 219 з ланкою 220 утворює обертальну кінематичну пару першого роду 229. Ланка 221 у свою чергу утворює обертальну кінематичну пару першого роду 230 з ланкою 222. Ланки 216, 218, 220 і 222 утворюють із ланкою 225 четверту обертальну кінематичну пару першого роду 231. При цьому осі обертання обертальних кінематичних пар першого роду 226-231 паралельні між собою. Ланка 223 утворює з підставою 214 обертальну кінематичну пару першого роду 232, а з ланкою 224 утворює обертальну кінематичну пару першого роду 233. Ланка 224 утворює з ланкою 225 обертальну кінематичну пару першого роду 234. При цьому осі обертання обертальних кінематичних пар першого роду 232-234 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 226-231. Ланки 215-222 утворюють плоску симетричну групу рухливих ланок із площиною симетрії н-н. Ланка 224 розташована в площині симетрії. Ланка 223 розташована паралельно площині симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 14) містить підставу 235 і кінематичний ланцюг механізму, який складається з п'яти структурних груп ланок, одна з яких містить два рухливі важелі 236 і 237, друга містить два рухливі важелі 238 і 239, третя містить два рухливі важелі 240 і 241, четверта містить два рухливі важелі 242 і 243, а п'ята містить два рухливі важелі 244 і 245, при цьому важелі 237, 241 і 245 зв'язані між собою через проміжну ланку 246 у вигляді хрестовини шарніра Гука. Ланки 236 і 238 утворюють із підставою 235 подвійну обертальну кінематичну пару першого роду 247. Ланка 236 з ланкою 237 утворює обертальну кінематичну пару першого роду 248. Ланка 238 у свою чергу утворює обертальну кінематичну пару першого роду 249 з ланкою 239. Ланка 237 з ланкою 239 утворює обертальну кінематичну пару першого роду 250. Ланки 240 і 242 утворюють із підставою 235 подвійну обертальну кінематичну пару першого роду 251. Ланка 240 з ланкою 241 утворює обертальну кінематичну пару першого роду 252. Ланка 242 у свою чергу утворює обертальну 5 UA 105404 U 5 10 15 20 25 30 35 40 45 50 55 60 кінематичну пару першого роду 253 з ланкою 243. Ланка 241 з ланкою 243 утворює обертальну кінематичну пару першого роду 254. Ланки 237 і 241 утворюють із ланкою 246 подвійну обертальну кінематичну пару першого роду 255. При цьому осі обертання обертальних кінематичних пар першого роду 247-255 паралельні між собою. Ланка 244 утворює з підставою 235 обертальну кінематичну пару першого роду 256, а з ланкою 245 утворює обертальну кінематичну пару першого роду 257. Ланка 245 утворює з ланкою 246 обертальну кінематичну пару першого роду 258. При цьому осі обертання обертальних кінематичних пар першого роду 256-258 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 247-255. Ланки 236-243 утворюють плоску симетричну групу рухливих ланок із площиною симетрії про. Ланка 245 розташована в площині симетрії. Ланка 244 розташована паралельно площині симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 15) містить підставу 259 і кінематичний ланцюг механізму, який складається з п'яти структурних груп ланок, одна з яких містить два рухливі важелі 260 і 261, друга містить два рухливі важелі 262 і 263, третя містить два рухливі важелі 264 і 265, четверта містить два рухливі важелі 266 і 267, а п'ята містить два рухливі важелі 268 і 269, при цьому важелі 261, 263, 265, 267 і 269 зв'язані між собою через проміжну ланку 270 у вигляді хрестовини шарніра Гука. Ланки 260 і 262 утворюють із підставою 259 подвійну обертальну кінематичну пару першого роду 271. Ланка 260 з ланкою 261 утворює обертальну кінематичну пару першого роду 272. Ланка 262 у свою чергу утворює обертальну кінематичну пару першого роду 273 з ланкою 263. Ланки 264 і 266 утворюють із підставою 259 подвійну обертальну кінематичну пару першого роду 274. Ланка 264 з ланкою 265 утворює обертальну кінематичну пару першого роду 275. Ланка 266 у свою чергу утворює обертальну кінематичну пар) першого роду 276 і ланкою 267. Ланки 261, 263, 265 і 267 утворюють із ланкою 270 четверну обертальну кінематичну пару першого роду 277. При цьому осі обертання обертальних кінематичних пар першого роду 271-277 паралельні між собою. Ланка 268 утворює з підставою 259 обертальну кінематичну пару першого роду 278, а з ланкою 269 утворює обертальну кінематичну пару першого роду 279. Ланка 269 утворює з ланкою 270 обертальну кінематичну пару першого роду 280. При цьому осі обертання обертальних кінематичних пар першого роду 278-280 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 271-277. Ланки 260-267 утворюють плоску симетричну групу рухливих ланок із площиною симетрії п-п. Ланка 269 розташована в площині симетрії. Ланка 268 розташована паралельно площині симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 16) містить підставу 281 і кінематичний ланцюг механізму, який складається з п'яти структурних груп ланок, одна з яких містить два рухливі важелі 282 і 283, друга містить два рухливі важелі 284 і 285, третя містить два рухливі важелі 286 і 287, четверта містить два рухливі важелі 288 і 289, а п'ята містить два рухливі важелі 290 і 291, при цьому важелі 283, 285, 287, 289 і 291 зв'язані між собою через проміжну ланку 292 у вигляді хрестовини шарніра Гука. Ланки 282 і 284 утворюють із підставою 281 подвійну обертальну кінематичну пару першого роду 293. Ланка 282 з ланкою 283 утворює обертальну кінематичну пару першого роду 294. Ланка 284 у свою чергу утворює обертальну кінематичну пару першого роду 295 з ланкою 285. Ланки 286 і 288 утворюють із підставою 281 подвійну обертальну кінематичну пару першого роду 296. Ланка 286 з ланкою 287 утворює обертальну кінематичну пару першого роду 297. Ланка 288 у свою чергу утворює обертальну кінематичну пару першого роду 298 з ланкою 289. Ланки 283, 285, 287 і 289 утворюють із ланкою 292 почетверену обертальну кінематичну пару першого роду 299. При цьому осі обертання обертальних кінематичних пар першого роду 293-299 паралельні між собою. Ланка 290 утворює з підставою 281 обертальну кінематичну пару першого роду 300, а з ланкою 291 утворює обертальну кінематичну пару першого роду 301. Ланка 291 утворює з ланкою 292 обертальну кінематичну пару першого роду 302. При цьому осі обертання обертальних кінематичних пар першого роду 300-302 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних нар першого роду 293-299. Ланки 282-289 утворюють плоску симетричну групу рухливих ланок із площиною симетрії р-р. Ланка 291 розташована в площині симетрії. Ланка 290 розташована паралельно площині симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 17) містить підставу 303 і кінематичний ланцюг механізму, який складається з п'яти структурних груп ланок, одна з яких містить два рухливі важелі 304 і 305, друга містить два рухливі важелі 306 і 307 третя містить два рухливі важелі 308 і 309, четверта містить два рухливі важелі 310 і 311, а п'ята містить два рухливі важелі 312 і 313, при цьому важелі 307,311 і 313 зв'язані між собою через проміжну ланку 314 у вигляді хрестовини шарніра Гука. Ланка 304 утворює з підставою 303 обертальну кінематичну пару першого роду 315. Ланка 304 з ланкою 306 утворює 6 UA 105404 U 5 10 15 20 25 30 35 40 45 50 55 60 обертальну кінематичну пару першого роду 316. Ланка 304 у свою чергу утворює обертальну кінематичну пару першого роду 317 з ланкою 305. Ланка 306 з ланкою 307 утворює обертальну кінематичну пару першого роду 318. Ланка 305 з ланкою 307 утворює обертальну кінематичну пару першого роду 319. Ланка 308 утворює з підставою 303 обертальну кінематичну пару першого роду 320. Ланка 308 з ланкою 310 утворює обертальну кінематичну пару першого роду 321. Ланка 308 у свою чергу утворює обертальну кінематичну пару першого роду 322 з ланкою 309. Ланка 310 з ланкою 311 утворює обертальну кінематичну пару першого роду 323. Ланка 309 з ланкою 311 утворює обертальну кінематичну пару першого роду 324. Ланки 307 і 311 утворюють із ланкою 314 подвійну обертальну кінематичну пару першого роду 325. При цьому осі обертання обертальних кінематичних пар першого роду 315-325 паралельні між собою. Ланка 312 утворює з підставою 314 обертальну кінематичну пару першого роду 326, а з ланкою 313 утворює обертальну кінематичну пару першого роду 327. Ланка 313 утворює з ланкою 314 обертальну кінематичну пару першого роду 328. При цьому осі обертання обертальних кінематичних пар першого роду 326-328 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 315-325. Ланки 304-311 утворюють плоску симетричну групу рухливих ланок із площиною симетрії з-з. Ланка 313 розташована в площині симетрії. Ланка 312 розташована паралельно площині симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 18) містить підставу 329 і кінематичний ланцюг механізму, який складається з п'яти структурних груп ланок, одна з яких містить два рухливі важелі 330 і 331, друга містить два рухливі важелі 332 і 333, третя містить два рухливі важелі 334 і 335, четверта містить два рухливі важелі 336 і 337, а п'ята містить два рухливі важелі 338 і 339, при цьому важелі 331, 335 і 339 зв'язані між собою через проміжну ланку 340 у вигляді хрестовини шарніра Гука. Ланка 330 утворює з підставою 329 обертальну кінематичну пару першого роду 341. Ланка 330 з ланкою 332 утворює обертальну кінематичну пару першого роду 342. Ланка 330 у свою чергу утворює обертальну кінематичну пару першого роду 343 з ланкою 331. Ланка 332 з ланкою 333 утворює обертальну кінематичну пару першого роду 344. Ланка 331 з ланкою 333 утворює обертальну кінематичну пару першого роду 345. Ланка 334 утворює з підставою 329 обертальну кінематичну пару першого роду 346. Ланка 334 з ланкою 336 утворює обертальну кінематичну пару першого роду 347. Ланка 334 у свою чергу утворює обертальну кінематичну пару першого роду 348 з ланкою 335. Ланка 336 з ланкою 337 утворює обертальну кінематичну пару першого роду 349. Ланка 335 з ланкою 337 утворює обертальну кінематичну пару першого роду 350. Ланки 331 і 335 утворюють із ланкою 340 подвійну обертальну кінематичну пару першого роду 351. При цьому осі обертання обертальних кінематичних пар першого роду 341-351 паралельні між собою. Ланка 338 утворює з підставою 329 обертальну кінематичну пару першого роду 352, а з ланкою 339 утворює обертальну кінематичну пару першого роду 353. Ланка 339 утворює з ланкою 340 обертальну кінематичну пару першого роду 354. При цьому осі обертання обертальних кінематичних пар першого роду 352-354 паралельні між собою і перпендикулярні осям обертання обертальних кінематичних пар першого роду 341-351. Ланки 330-337 утворюють плоску симетричну групу рухливих ланок із площиною симетрії т-т. Ланка 339 розташована в площині симетрії. Ланка 338 розташована паралельно площині симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 19) містить підставу 355 і кінематичний ланцюг механізму, який складається із чотирьох структурних груп ланок, одна з яких містить два рухливі важелі 356 і 357, друга містить два рухливі важелі 358 і 359, третя містить два рухливі важелі 360 і 361, а четверта містить два рухливі важелі 362 і 363, при цьому важелі 357, 359 і 363 зв'язані між собою безпосередньо. Ланка 356 утворює з підставою 355 обертальну кінематичну пару першого роду 364. Ланка 356 з ланками 357 і 360 утворює подвійну обертальну кінематичну пару першого роду 365. Ланка 358 утворює з підставою 355 обертальну кінематичну пару першого роду 366. Ланка 358 з Ланками 359 і 361 утворює подвійну обертальну кінематичну пару першого роду 367. Ланка 360 у свою чергу утворює обертальну кінематичну пару першого роду 368 з ланкою 361. Ланки 357 і 359 утворюють із ланкою 363 подвійний дворухливий сферичний шарнір s пальцем на одній і циліндричним пазом на іншій сферичній поверхні 369. При цьому осі обертання обертальних кінематичних пар першого роду 364-368 паралельні між собою. Ланка 362 утворює з підставою 355 обертальну кінематичну пару першого роду 370, а з ланкою 363 утворює обертальну кінематичну пару першого роду 371. При цьому осі обертання обертальних кінематичних пар першого роду 370 і 371 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 364-368. Ланки 356-361 утворюють плоску симетричну групу рухливих ланок із площиною симетрії. Ланка 363 розташована в площині симетрії. Ланка 362 розташована паралельно площині симетрії. 7 UA 105404 U 5 10 15 20 25 30 35 40 45 50 55 60 Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 20) містить підставу 372 і кінематичний ланцюг механізму, який складається з п'яти структурних груп ланок, одна з яких містить два рухливі важелі 373 і 374, друга містить два рухливі важелі 375 і 376, третя містить два рухливі важелі 377 і 378, четверта містить два рухливі важелі 379 і 380, а п'ята містить два рухливі важелі 381 і 382, при цьому важелі 374, 376, 378, 380 і 382 зв'язані між собою безпосередньо. Ланка 373 утворює з підставою 372 обертальну кінематичну пару першого роду 383. Ланка 373 з ланкою 374 утворює обертальну кінематичну пару першого роду 384. Ланка 375 у свою чергу утворює обертальну кінематичну пару першого роду 385 з підставою 372. Ланка 375 з ланкою 376 утворює обертальну кінематичну пару першого роду 366. Ланки 377 і 379 з підставою 372 утворює подвійну обертальну кінематичну пиру першого роду 387. Ланка 377 з ланкою 378 утворює обертальну кінематичну пару першого роду 388. Ланка 379 у свою чергу утворює обертальну кінематичну пару першого роду 389 з ланкою 380. Ланки 374, 376, 378 і 380 утворюють із ланкою 382 четверний дворухливий сферичний шарнір з пальцем на одній і циліндричним пазом на іншій сферичній поверхні 390. При цьому осі обертання обертальних кінематичних пар першого роду 383-389 паралельні між собою. Ланка 381 утворює з підставою 372 обертальну кінематичну пару першого роду 391, а з ланкою 382 утворює обертальну кінематичну пару першого роду 392. При цьому осі обертання обертальних кінематичних пар першого роду 391 і 392 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 383-389. Ланки 373-380 утворюють плоску симетричну групу рухливих ланок із площиною симетрії ф-ф. Ланка 382 розташована в площині симетрії. Ланка 381 розташована паралельно площині симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 21) містить підставу 393 і кінематичний ланцюг механізму, який складається з п'яти структурних груп ланок, одна з яких містить два рухливі важелі 394 і 395, друга містить два рухливі важелі 396 і 397, третя містить два рухливі важелі 398 і 399, четверта містить два рухливі важелі 400 і 401, а п'ята містить два рухливі важелі 402 і 403, при цьому важелі 395, 397, 399, 401 і 403 зв'язані між собою за допомогою проміжної ланки 404. Ланка 394 утворює з підставою 393 обертальну кінематичну пару першого роду 405. Ланка 394 з ланкою 395 утворює обертальну кінематичну пару першого роду 406. Ланка 396 у свою чергу утворює обертальну кінематичну пару першого роду 407 з підставою 393. Ланка 396 з ланкою 397 утворює обертальну кінематичну пару першого роду 408. Ланки 395 і 397 із проміжною ланкою 404 утворюють подвійну обертальну кінематичну пару першого роду 409. Ланка 398 утворює з підставою 393 обертальну кінематичну пару першого роду 410. Ланка 398 і ланкою 399 утворює обертальну кінематичну пару першого роду 411. Ланка 400 у свою чергу утворює обертальну кінематичну пару першого роду 412 з підставою 393. Ланка 400 з ланкою 401 утворює обертальну кінематичну пару першого роду 413. Ланки 399 і 401 із проміжною ланкою 404 утворюють подвійну обертальну кінематичну тіару першого роду 414. При цьому осі обертання обертальних кінематичних пар першого роду 405-414 паралельні між собою. Ланка 402 утворює з підставою 393 обертальну кінематичну пару першого роду 415, а з ланкою 403 утворює обертальну кінематичну пару першого роду 416. Ланка 403 утворює обертальну кінематичну пару першого роду 417 із проміжною ланкою 404. При цьому осі обертання обертальних кінематичних пар першого роду 415-417 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 405-414. Ланки 394-401 утворюють плоску симетричну групу рухливих ланок із площиною симетрії х-х. Ланка 403 розташована в площині симетрії. Ланка 402 розташована паралельно площині симетрії. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Фіг. 22) містить підставу 418 і кінематичний ланцюг механізму, який складається з п'яти структурних груп ланок, одна з яких містить два рухливі важелі 419 і 420, друга містить два рухливі важелі 421 і 422, третя містить два рухливі важелі 423 і 424, четверта містить два рухливі важелі 425 і 426, а п'ята містить дна рухливі важелі 427 і 428, при цьому важелі 420, 422, 424, 426 і 428 зв'язані між собою за допомогою проміжної ланки 429. Ланки 419 і 421 утворюють із підставою 418 подвійну обертальну кінематичну пару першого роду 430. Ланка 419 з ланкою 420 утворює обертальну кінематичну пару першого роду 431. Ланка 421 у свою чергу утворює обертальну кінематичну пару першого роду 432 з ланкою 422. Ланки 420 і 422 утворюють із підставою 418 подвійну обертальну кінематичну пару першого роду 433. Ланка 423 утворює з підставою 418 обертальну кінематичну пару першого роду 434. Ланка 423 з ланкою 424 утворює обертальну кінематичну пару першого роду 435. Ланка 424 у свою чергу утворює обертальну кінематичну пару першого роду 436 із проміжною ланкою 429. Ланка 425 утворює з підставою 418 обертальну кінематичну пару першого роду 437. Ланка 425 з ланкою 426 утворює обертальну кінематичну пару першого роду 438. Ланка 426 у свою чергу утворює обертальну кінематичну 8 UA 105404 U 5 10 15 20 25 30 35 40 45 50 55 60 пару першого роду 439 із проміжною ланкою 429. При цьому осі обертання обертальних кінематичних пар першого роду 430-439 паралельні між собою. Ланка 427 утворює з підставою 418 обертальну кінематичну пару першого роду 440, а з ланкою 428 утворює обертальну кінематичну пару першого роду 441. Ланка 428 утворює обертальну кінематичну пару першого роду 442 із проміжною ланкою 429. При цьому осі обертання обертальних кінематичних пар першого роду 440-442 паралельні між собою й перпендикулярні осям обертання обертальних кінематичних пар першого роду 430-439. Ланки 419-426 утворюють плоску симетричну групу рухливих ланок із площиною симетрії ц-ц. Ланка 428 розташована в площині симетрії. Ланка 427 розташована паралельно площині симетрії. Наведені приклади виконання пропонованого шарнірно-важільного точного протиобертального прямолінійно-напрямного механізму не вичерпують усіх його можливих варіантів. Так число структурних груп ланок у йото кінематичному ланцюзі може бути й більше п'яти. Так число проміжних ланок може бути й більше одної. Так число структурних груп ланок, осі обертальних пар яких розташовані під кутом один до одного може бути й більше двох, кут між осями обертальних пар різних структурних груп ланок може бути й менше 90°. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 1) працює в такий спосіб. При обертанні провідної ланки 6 приводиться в рух ланка 7, яка через обертальну кінематичну пару першого роду 16 приводить ланку 8 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 3 і 4 виконують складний рух у площині й надають руху ланкам 2 і 4 які виконують точне синхронне протиобертання навколо осі обертання подвійної обертальної кінематичної пари першого роду 9. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 2) працює в такий спосіб. При обертанні провідної ланки 22 приводиться в рух ланка 23, яка через обертальну кінематичну пару першого роду 33 приводить ланку 24 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 19 і 21 виконують складний рух у площині й приводять в рух ланки 18 і 20 які виконують точне синхронно протиобертання навколо осей обертання обертальних кінематичних пар першого роду 25 і 28. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 3) працює в такий спосіб. При обертанні провідної ланки 39 приводиться в рух ланка 39а, яка через обертальну кінематичну пару першого роду 48 приводить ланку 40 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 36 і 38 виконують складний рух у площині й надають руху ланкам 35 і 37, які виконують, точне синхронне протиобертання навколо осі обертання подвійної обертальної кінематичної пари першого роду 41. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 4) працює в такий спосіб. При обертанні провідної ланки 54 приводиться в рух ланка 55. яка через обертальну кінематичну пару першого роду 64 приводить ланку 56 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 51 і 53 виконують складний рух у площині й надають руху ланкам 50 і 52 які виконують точне синхронне протиобертання навколо осі обертання подвійної обертальної кінематичної пари першого роду 57. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 5) працює в такий спосіб. При обертанні провідної ланки 70 приводиться в рух ланка 71, яка через обертальну кінематичну пару першого роду 81 приводить ланку 72 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 67 і 69 виконують складний рух у площині й надають руху ланкам 66 і 68, які роблять точне синхронне протиобертання навколо осей обертання обертальних кінематичних пар першого роду 73 і 76. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 6) працює в такий спосіб. При обертанні провідної ланки 87 приводиться в рух ланка 88, яка через обертальну кінематичну пару першого роду 99 приводить ланку 89 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних 9 UA 105404 U 5 10 15 20 25 30 35 40 45 50 55 груп ланок. При цьому ланки 84 і 86 виконують складний рух у площині й надають руху ланкам 83 і 85, які виконують точне синхронне протиобертання навколо осі обертання подвійної обертальної кінематичної пари першого роду 92. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 7) працює в такий спосіб. При обертанні провідної ланки 108 приводиться в рух ланка 109, яка через обертальну кінематичну пару першого роду 117 приводить ланку 110 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 105 і 107 виконують складний рух у площині й падають руху ланкам 104 і 106 які виконують точне синхронне протиобертання навколо осі обертання подвійної обертальної кінематичної пари першого роду 111. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 8) працює в такий спосіб. При обертанні провідної ланки 123 приводиться в рух ланка 124, яка через дворухливий сферичний шарнір 127 приводить центр шарніра в прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 120 і 122 виконують складний рух у площині й надають руху ланкам 119 і 121 які виконують точне синхронне протиобертання навколо осей обертання обертальних кінематичних пар першого роду 125 і 128. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 9) працює в такий спосіб. При обертанні провідної ланки 137 приводиться в рух ланка 138, яка через трирухливий сферичний шарнір 141 приводить центр шарніра в прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 134 і 136 виконують складний рух у площині й надають руху ланкам 133 і 135, які виконують точне синхронне протиобертання навколо осі обертання подвійної обертальної кінематичної нари першого роду 139. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 10) працює в такий спосіб. При обертанні провідної ланки 152 приводиться в рух ланка 153, яка через обертальну кінематичну пару першого роду 173 приводить ланку 154 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 147, 149, 150 і 151 виконують складний рух j площині й надають руху ланкам 146 і 148 які виконують точне синхронне протиобертання навколо осі обертання подвійної обертальної кінематичної пари першого роду 155. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 11) працює в такий спосіб. При обертанні провідної ланки 181 приводиться в рух ланка 182, яка через обертальну кінематичну пару першого роду 193 приводить ланку 183 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 177-180 виконують складний рух у площині й надають руху ланкам 175 і 176, які виконують точне синхронне протиобертання навколо осі обертання подвійної обертальної кінематичної пари першого роду 184. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 12) працює в такий спосіб. При обертанні провідної ланки 201 приводиться в рух ланка 202, яка через обертальну кінематичну пару першого роду 213 приводить ланку 203 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 197-200 виконують складний рух у площині й надають руху ланкам 195 і 196, які виконують точне синхронне протиобертання навколо осі обертання подвійної обертальної кінематичної пари першого роду 204. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 13) працює в такий спосіб. При обертанні провідної ланки 223 приводиться в рух ланка 224, яка через обертальну кінематичну пару першого роду 234 приводить ланку 225 у прямолінійний поступальний рух у напрямку. співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 216, 218, 220 і 222 виконують складний рух у площині й надають руху ланкам 215, 217, 219 і 221, які виконують точне синхронне протиобертання навколо осі обертання подвійної обертальної кінематичної пари першого роду 226. 10 UA 105404 U 5 10 15 20 25 30 35 40 45 50 55 Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 14) працює в такий спосіб. При обертанні провідної ланки 244 приводиться в рух ланка 245, яка через обертальну кінематичну пару першого роду 258 приводить ланку 246 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 237, 239, 241 і 243 виконують складний рух у площині й надають руху ланкам 236, 238, 240 і 242, які виконують точне синхронне протиобертання навколо осей обертання обертальних кінематичних пар першого роду 247 і 251. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 15) працює в такий спосіб. При обертанні провідної ланки 268 приводиться в рух ланка 269, яка через обертальну кінематичну пару першого роду 280 приводить ланку 270 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 261, 263, 265 і 267 виконують складний рух у площині й падають руху ланкам 260, 262, 264 і 266, які виконують точне синхронне протиобертання навколо осей обертання обертальних кінематичних пар першого роду 271 і 274. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 16) працює в такий спосіб. При обертанні провідної ланки 290 приводиться в рух ланка 291, яка через обертальну кінематичну пару першого роду 302 приводить проміжну ланку 292 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 283, 285, 287 і 289 виконують складний рух у площині й падають руху ланкам 282, 284, 286 і 288, які виконують точне синхронне протиобертання навколо осей обертання обертальних кінематичних пар першого роду 293 і 296. Шарнірно-важільний точний проти обертальний прямолінійно-напрямний механізм (Див. Фіг. 17) працює в такий спосіб. При обертанні провідної лайки 312 приводиться в рух ланка 313, яка через обертальну кінематичну пару першого роду 328 приводить проміжну ланку 314 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 305-307 і 309-311 виконують складний рух у площині й надають руху ланкам 304 і 308, які виконують точне синхронне протиобертання навколо осей обертання обертальних кінематичних пар першого роду 315 і 320. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 18) працює в такий спосіб. При обертанні провідної ланки 338 приводиться в рух ланка 339, яка через обертальну кінематичну пару першого роду 354 приводить проміжну ланку 340 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 331-333 і 335-337 виконують складний рух у площині й надають руху ланкам 330 і 334, які виконують точне синхронне протиобертання навколо осей обертання обертальних кінематичних пар першого роду 341 і 346. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 19) працює в такий спосіб. При обертанні провідної ланки 362 приводиться в рух ланка 363, яка через дворухливий сферичний шарнір 369 приводить центр шарніра в прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 357, 359, 360 і 361 виконують складний рух у площині й надають руху ланкам 356 і 358, які виконують точне синхронне протиобертання навколо осей обертання обертальних кінематичних пар першого роду 364 і 366. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 20) працює в такий спосіб. При обертанні провідної ланки 381 приводиться в рух ланка 382, яка через дворухливий сферичний шарнір 390 приводить центр шарніра в прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 374. 376, 378 і 380 виконують складний рух у площині й падають руху ланкам 373 і 375, які виконують точне синхронне протиобертання навколо осей обертання обертальних кінематичних пар першого роду 383 і 385, а також ланки 377 і 379, які виконують точне синхронне протиобертання навколо осі подвійної обертальної кінематичної пари першого роду 387. 11 UA 105404 U 5 10 15 20 Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 21) працює в такий спосіб. При обертанні провідної ланки 402 приводиться в рух ланка 403, яка через обертальну кінематичну пару першого роду 417 приводить проміжну ланку 404 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 395, 397, 399 і 401 виконують складний рух у площині й надають руху ланкам 394, 396, 398 і 400, які виконують точне синхронне протиобертання навколо осей обертання обертальних кінематичних пар першого роду 405, 407, 410 і 412. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм (Див. Фіг. 22) працює в такий спосіб. При обертанні провідної ланки 427 приводиться в рух ланка 428, яка через обертальну кінематичну пару першого роду 442 приводить ланку 429 у прямолінійний поступальний рух у напрямку, співпадаючому з лінією перетинання площин розташування двох плоских структурних груп ланок. При цьому ланки 420, 422, 424 і 426 виконують складний рух у площині й надають руху ланкам 419 і 421, які виконують точне синхронне протиобертання навколо осі обертання подвійної обертальної кінематичної пари першого роду 430, а також ланки 423 і 425, які виконують точне синхронне протиобертання навколо осей обертання обертальних кінематичних пар першого роду 434 і 437. Пропонований шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм у порівнянні з відомими механізмами має більш широкі функціональні можливості та область застосування. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 45 50 55 60 1. Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм, що містить підставу й кінематичний ланцюг, що містить структурні групи ланок, кожна з яких містить щонайменше дві рухливі ланки, що утворюють між собою щонайменше одну обертальну кінематичну пару першого роду і щонайменше одну зовнішню обертальну кінематичну пару першого роду з підставою, причому осі обертання вказаних обертальних кінематичних пар першого роду паралельні між собою, при цьому осі обертання обертальних кінематичних пар першого роду щонайменше двох структурних груп ланок розташовані під кутом одна до одної, а щонайменше два важелі щонайменше двох структурних груп ланок зв'язані між собою щонайменше безпосередньо й принаймні безпосередньо й через групу проміжних ланок, який відрізняється тим, що його кінематичний ланцюг містить щонайменше три плоскі структурні групи ланок, з яких щонайменше дві плоскі структурні групи ланок утворюють між собою плоску симетричну групу ланок, при цьому площина розташування ланок щонайменше однієї іншої структурної групи ланок, осі обертання обертальних кінематичних пар першого роду яких розташовані під кутом до осей обертання обертальних кінематичних пар першого роду симетричної групи рухливих ланок, проходить через вісь симетрії групи рухливих ланок або паралельна вказаній осі симетрії. 2. Механізм за п. 1, який відрізняється тим, що безпосередній зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок виконано у вигляді дворухливого сферичного шарніра з пальцем на одній сферичній поверхні й круговим пазом на іншій сферичній поверхні. 3. Механізм за п. 1, який відрізняється тим, що безпосередній зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок виконано у вигляді трирухливого сферичного шарніра. 4. Механізм за п. 1, який відрізняється тим, що зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок через проміжну ланку виконано у вигляді двошарнірного з'єднання із проміжною ланкою, наприклад, у вигляді шарніра Гука. 5. Механізм за п. 1, який відрізняється тим, що кут між площиною розташування плоскої симетричної групи рухливих ланок й площиною розташування щонайменше однієї іншої структурної групи ланок виконано прямим. 6. Механізм за п. 1, який відрізняється тим, що кут між площиною розташування плоскої симетричної групи рухливих ланок й площиною розташування щонайменше однієї іншої структурної групи ланок виконано відмінним від прямого. 7. Механізм за п. 1, який відрізняється тим, що зв'язок між щонайменше двома важелями щонайменше двох структурних груп ланок, що утворюють плоску симетричну групу рухливих ланок, виконана через проміжну ланку, при цьому щонайменше одна плоска рухлива структурна 12 UA 105404 U 5 група ланок вказаної плоскої симетричної групи ланок зміщена плоско-паралельно відносно напрямку переміщення проміжної ланки в площині розташування вказаної плоскої симетричної групи ланок або в площині, що паралельна площині розташування вказаної плоскої симетричної групи ланок. 8. Механізм за п. 1, який відрізняється тим, що його кінематичний ланцюг містить, щонайменше чотири плоскі структурні групи ланок, при цьому вони попарно утворюють щонайменше одну пару плоских симетричних груп рухливих ланок, які розташовані у пересічних площинах. 13 UA 105404 U 14 UA 105404 U 15 UA 105404 U 16 UA 105404 U 17 UA 105404 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 18
ДивитисяДодаткова інформація
Назва патенту англійськоюArticulation accurate anti-rotary straightforward-guiding mechanism by v.p. sablin
Автори англійськоюSablin Viktor Petrovych
Назва патенту російськоюШарнирно-рычажный точный антивращательный прямолинейно-направляющий механизм в.п. саблина
Автори російськоюСаблин Виктор Петрович
МПК / Мітки
МПК: F16H 21/04
Мітки: шарнірно-важільний, сабліна, в.п, механізм, прямолінійно-напрямний, протиобертальний, точний
Код посилання
<a href="https://ua.patents.su/20-105404-sharnirno-vazhilnijj-tochnijj-protiobertalnijj-pryamolinijjno-napryamnijj-mekhanizm-vp-sablina.html" target="_blank" rel="follow" title="База патентів України">Шарнірно-важільний точний протиобертальний прямолінійно-напрямний механізм в.п. сабліна</a>
Шарнірно-важільний точний прямолінійно-напрямний механізм в.п. сабліна
Номер патенту: 102668
Опубліковано: 10.11.2015
Автор: Саблін Віктор Петрович
МПК: F16H 21/04
Мітки: точний, в.п, сабліна, механізм, прямолінійно-напрямний, шарнірно-важільний
Формула / Реферат:
1. Шарнірно-важільний точний прямолінійно-напрямний механізм, що містить підставу й кінематичний ланцюг, який складається з рухомих ланок у вигляді важелів, утворюючих між собою й з підставою обертальні кінематичні пари, який відрізняється тим, що його кінематичний ланцюг містить щонайменше дві структурні групи ланок, кожна з яких містить щонайменше дві рухомі ланки, які утворюють між собою щонайменше одну обертальну кінематичну пару першого...
Шарнірно-важільний точний протиобертальний механізм в.п. сабліна
Номер патенту: 104799
Опубліковано: 25.02.2016
Автор: Саблін Віктор Петрович
МПК: F16C 3/00, F16H 51/00, F16H 21/26
Мітки: механізм, шарнірно-важільний, точний, протиобертальний, сабліна, в.п
Формула / Реферат:
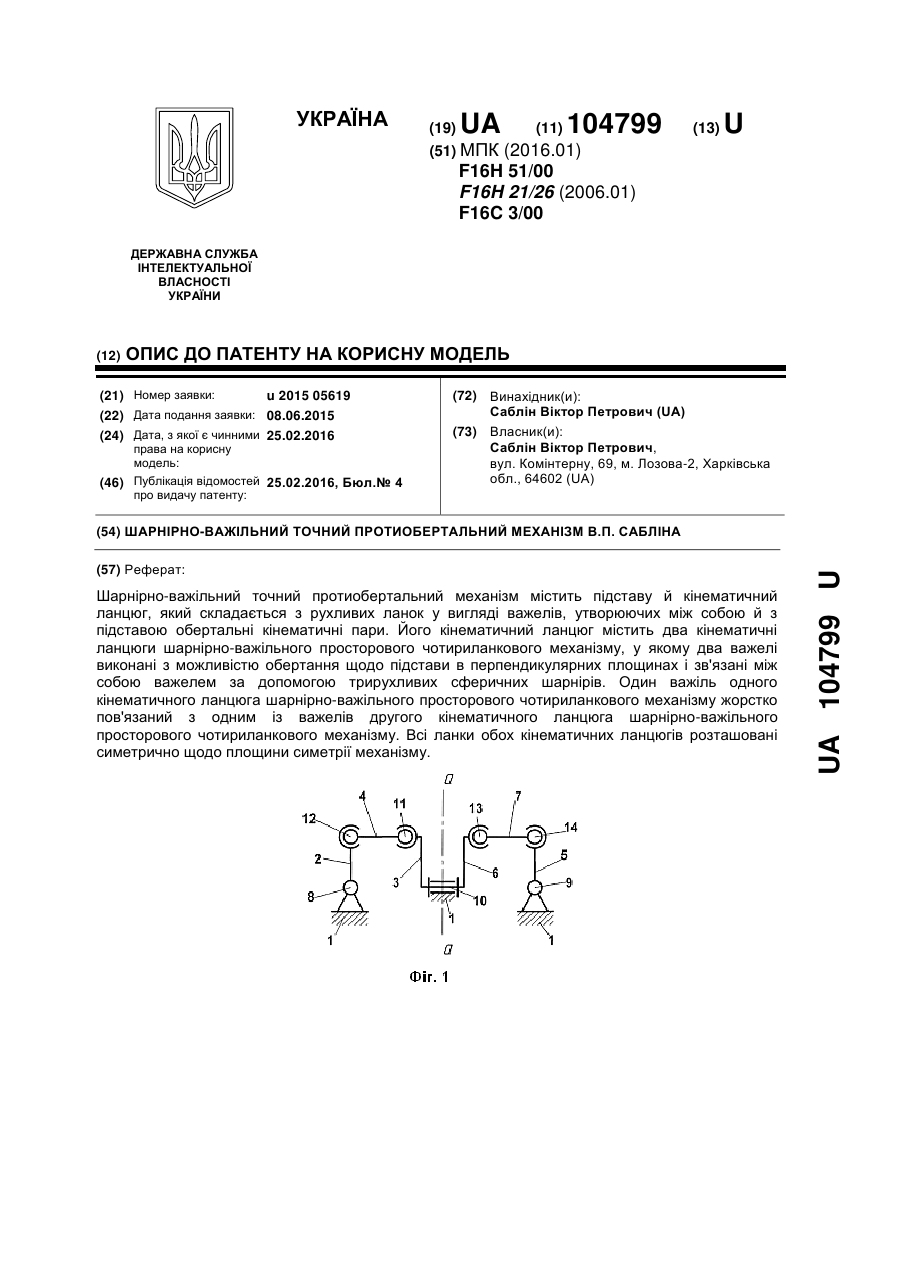
1. Шарнірно-важільний точний протиобертальний механізм, що містить підставу й кінематичний ланцюг, який складається з рухливих ланок у вигляді важелів, утворюючих між собою й з підставою обертальні кінематичні пари, який відрізняється тим, що його кінематичний ланцюг містить два кінематичні ланцюги шарнірно-важільного просторового чотириланкового механізму, у якому два важелі виконані з можливістю обертання щодо підстави в перпендикулярних...
Кулісно-важільний прямолінійно-напрямний механізм
Номер патенту: 86369
Опубліковано: 25.12.2013
Автор: Музичишин Сергій Володимирович
МПК: F16H 21/00
Мітки: механізм, прямолінійно-напрямний, кулісно-важільний
Формула / Реферат:
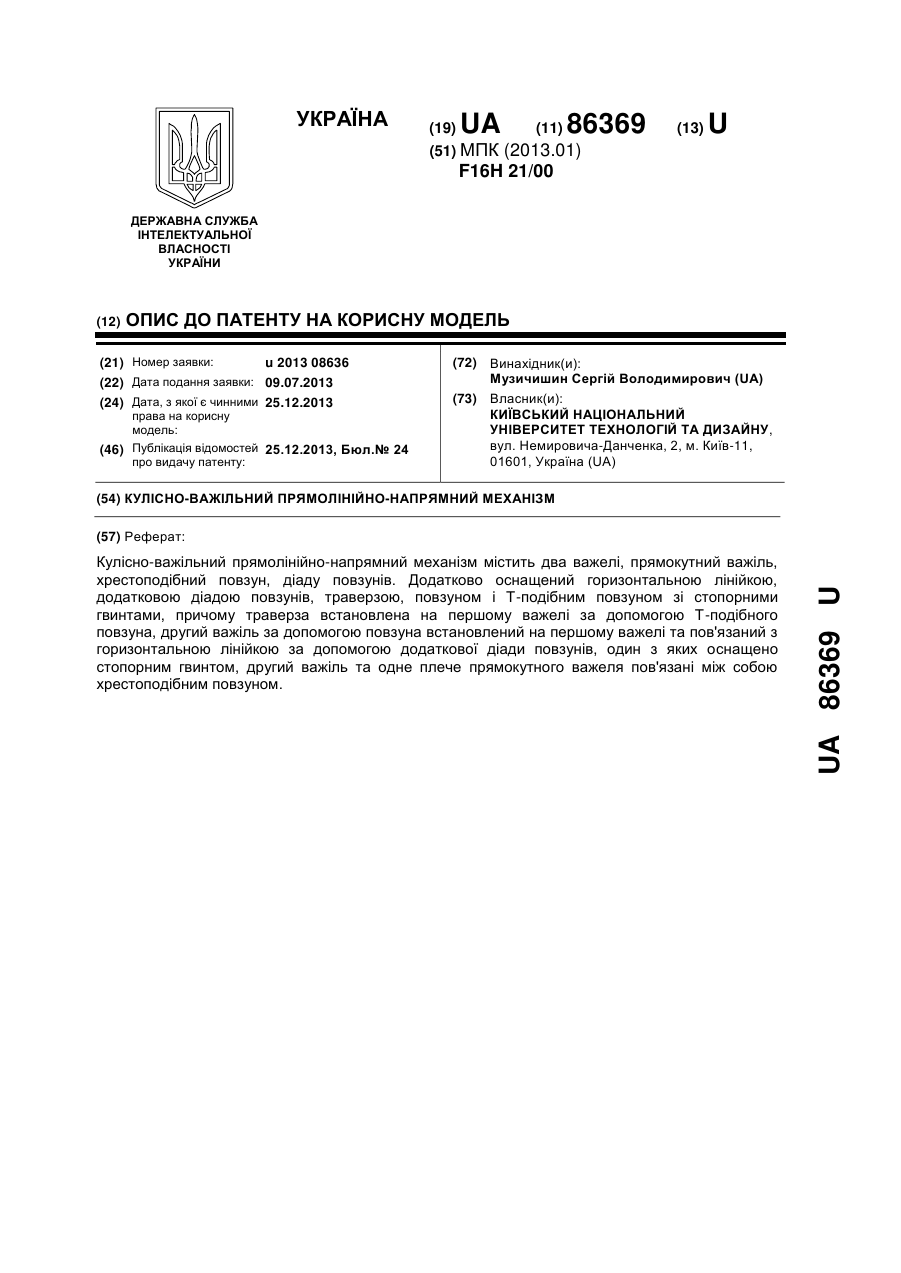
Кулісно-важільний прямолінійно-напрямний механізм, що містить два важелі, прямокутний важіль, хрестоподібний повзун, діаду повзунів, який відрізняється тим, що додатково оснащений горизонтальною лінійкою, додатковою діадою повзунів, траверзою, повзуном і Т-подібним повзуном зі стопорними гвинтами, причому траверза встановлена на першому важелі за допомогою Т-подібного повзуна, другий важіль за допомогою повзуна встановлений на першому важелі...
Механізм в.п. сабліна з гнучкою ланкою
Номер патенту: 104774
Опубліковано: 25.02.2016
Автор: Саблін Віктор Петрович
МПК: F16H 19/00
Мітки: ланкою, гнучкою, в.п, сабліна, механізм
Формула / Реферат:
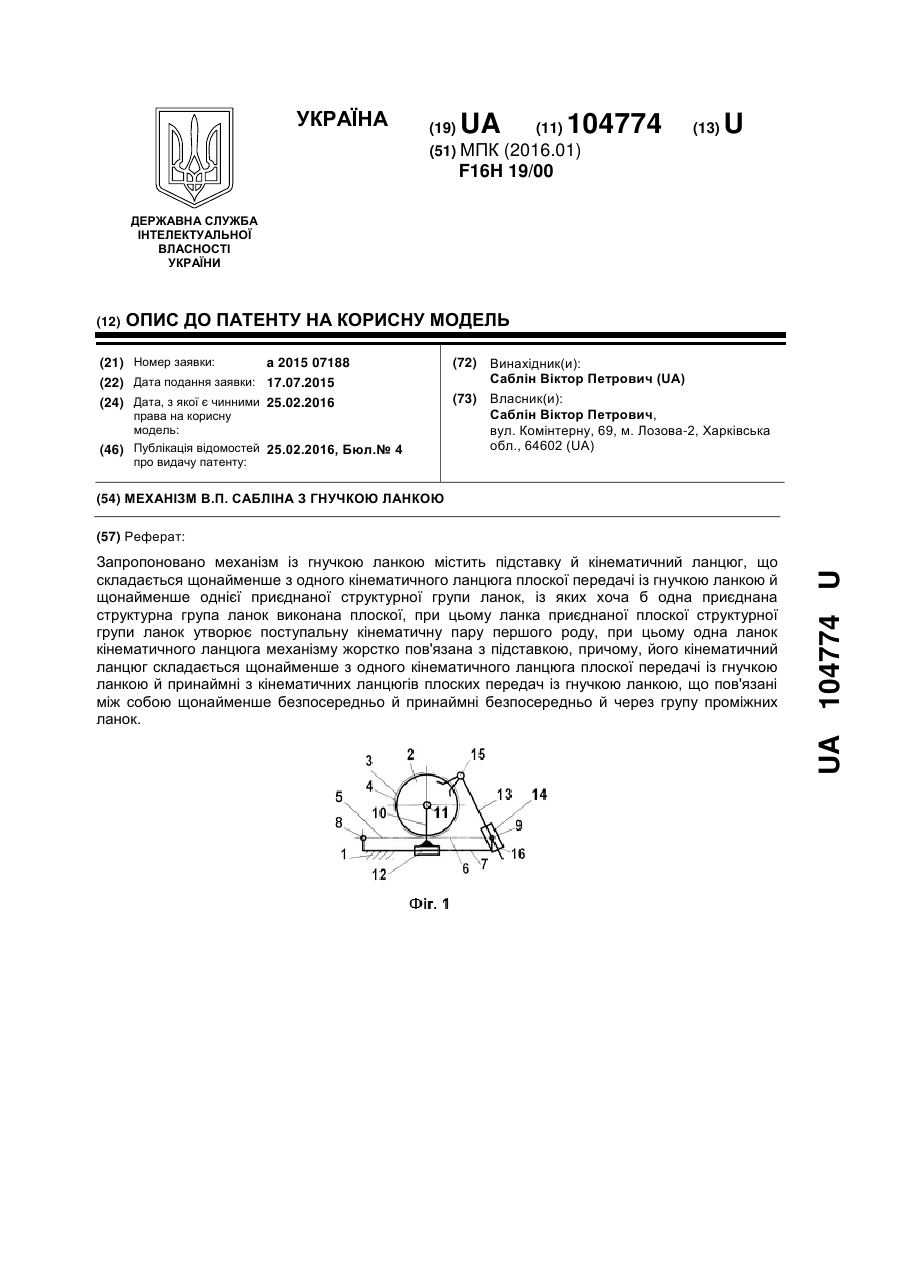
1. Механізм із гнучкою ланкою, що містить підставку й кінематичний ланцюг, що складається з кінематичного ланцюга плоскої передачі із гнучкою ланкою, а також щонайменше з однієї приєднаної структурної групи ланок, з яких хоча б одна приєднана структурна група ланок виконана плоскою, при цьому ланка приєднаної плоскої структурної групи ланок утворює поступальну кінематичну пару першого роду з ланкою його кінематичного ланцюга, причому одна з...
Механізм в.п. сабліна з гнучкою ланкою
Номер патенту: 90317
Опубліковано: 26.05.2014
Автор: Саблін Віктор Петрович
МПК: F16H 19/00
Мітки: ланкою, гнучкою, в.п, сабліна, механізм
Формула / Реферат:
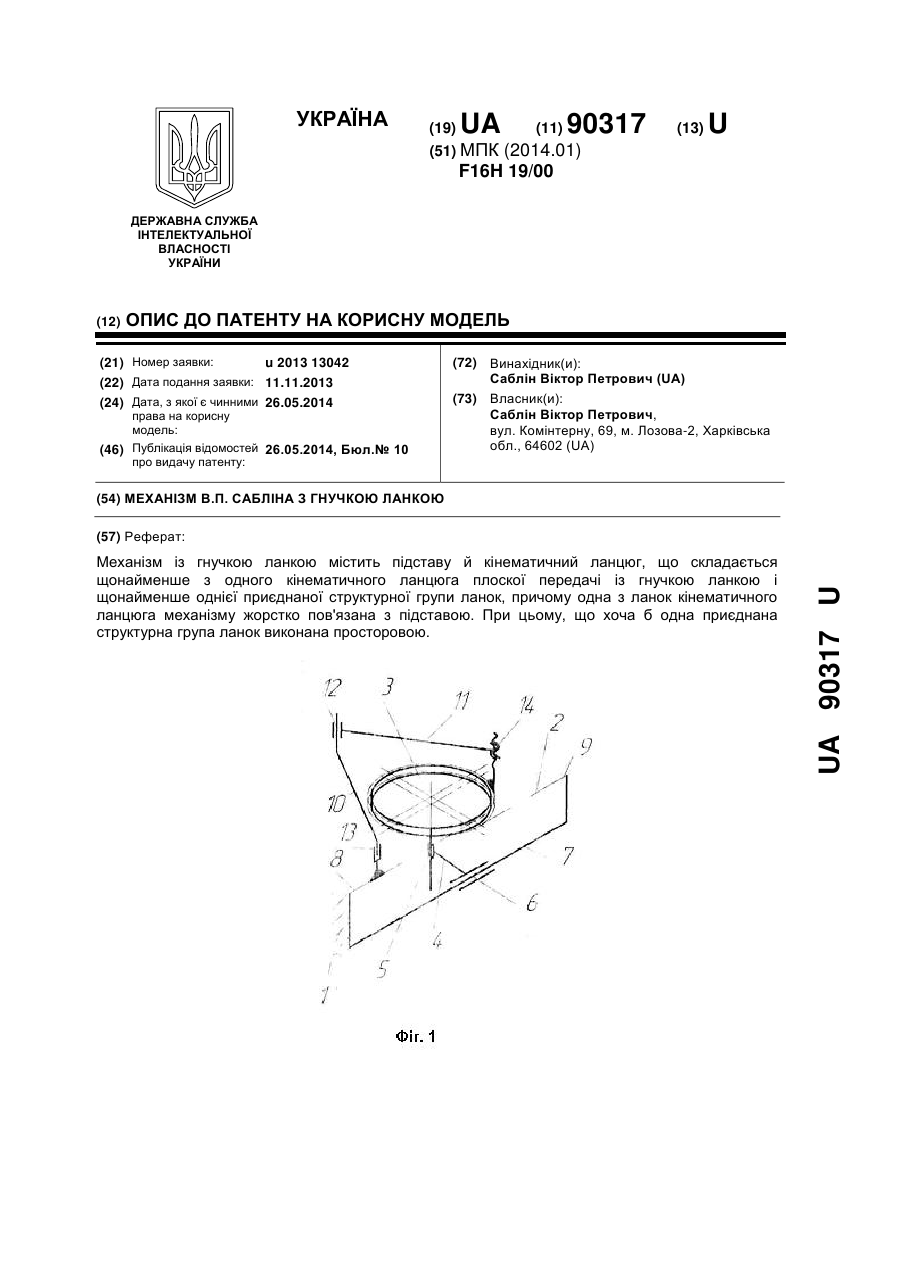
1. Механізм із гнучкою ланкою, що містить підставу й кінематичний ланцюг, що складається щонайменше з одного кінематичного ланцюга плоскої передачі із гнучкою ланкою і щонайменше однієї приєднаної структурної групи ланок, причому одна з ланок кінематичного ланцюга механізму жорстко пов'язана з підставою, який відрізняється тим, що хоча б одна приєднана структурна група ланок виконана просторовою.2. Механізм за п. 1, який відрізняється...
Попередній патент: Спосіб відновлення чавунних прокатних валків з пошкодженими шийками
Наступний патент: Система управління тиском в автомобільних шинах
Випадковий патент: Пристрій віброгасіння