Шарнірно-важільний точний протиобертальний механізм в.п. сабліна

Формула / Реферат
1. Шарнірно-важільний точний протиобертальний механізм, що містить підставу й кінематичний ланцюг, який складається з рухливих ланок у вигляді важелів, утворюючих між собою й з підставою обертальні кінематичні пари, який відрізняється тим, що його кінематичний ланцюг містить два кінематичні ланцюги шарнірно-важільного просторового чотириланкового механізму, у якому два важелі виконані з можливістю обертання щодо підстави в перпендикулярних площинах і зв'язані між собою важелем за допомогою трирухливих сферичних шарнірів, при цьому один важіль одного кінематичного ланцюга шарнірно-важільного просторового чотириланкового механізму жорстко пов'язаний з одним із важелів другого кінематичного ланцюга шарнірно-важільного просторового чотириланкового механізму, причому всі ланки обох кінематичних ланцюгів розташовані симетрично щодо площини симетрії механізму.
2. Механізм за п. 1, який відрізняється тим, що один із важелів кожного з двох кінематичних ланцюгів шарнірно-важільних просторових чотириланкових механізмів має вісь обертання щодо підстави, паралельну площини симетрії механізму.
3. Механізм за п. 1, який відрізняється тим, що один із важелів кожного з двох кінематичних ланцюгів шарнірно-важільних просторових чотириланкових механізмів має загальну вісь обертання щодо підстави, яка розташована в площині симетрії механізму.
Текст
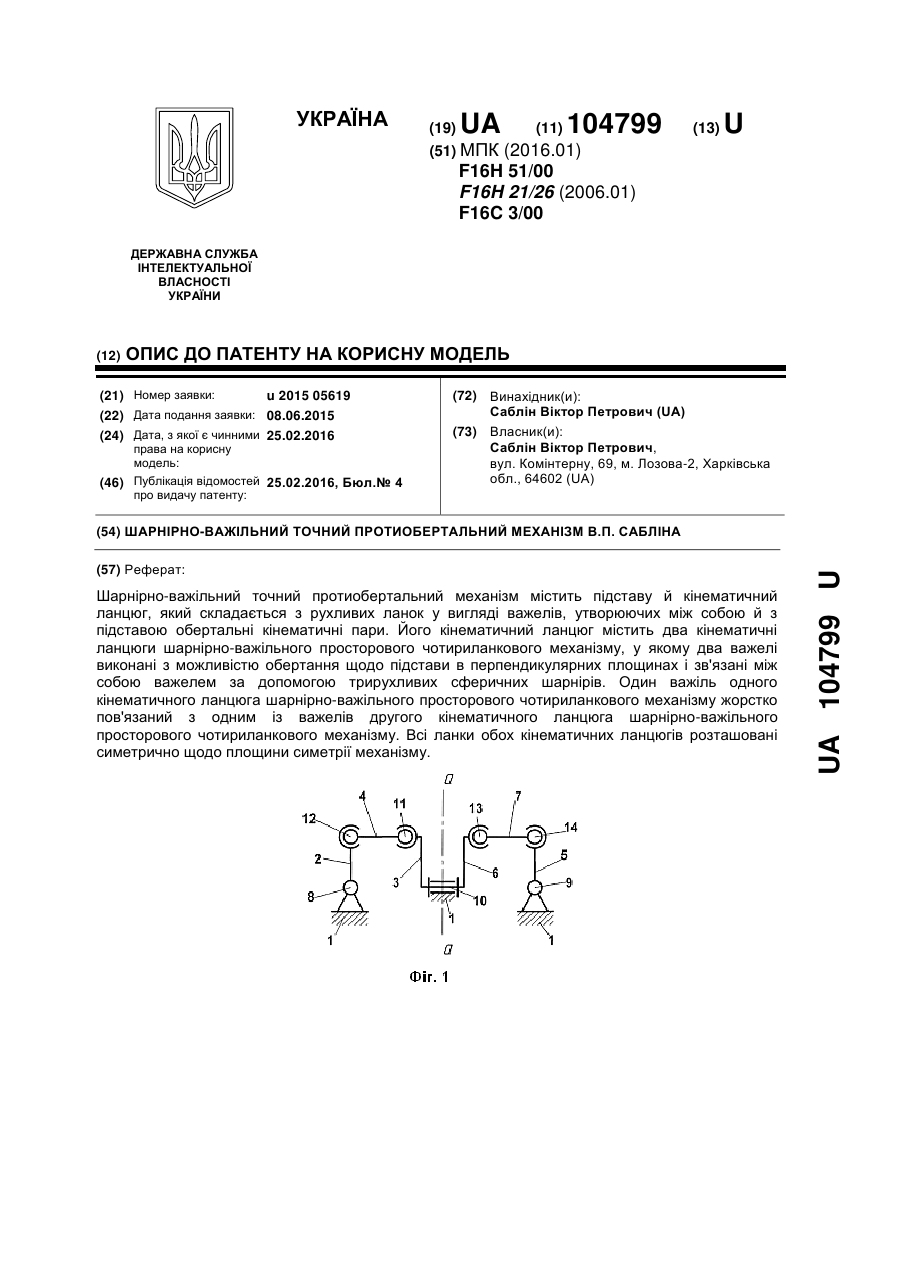
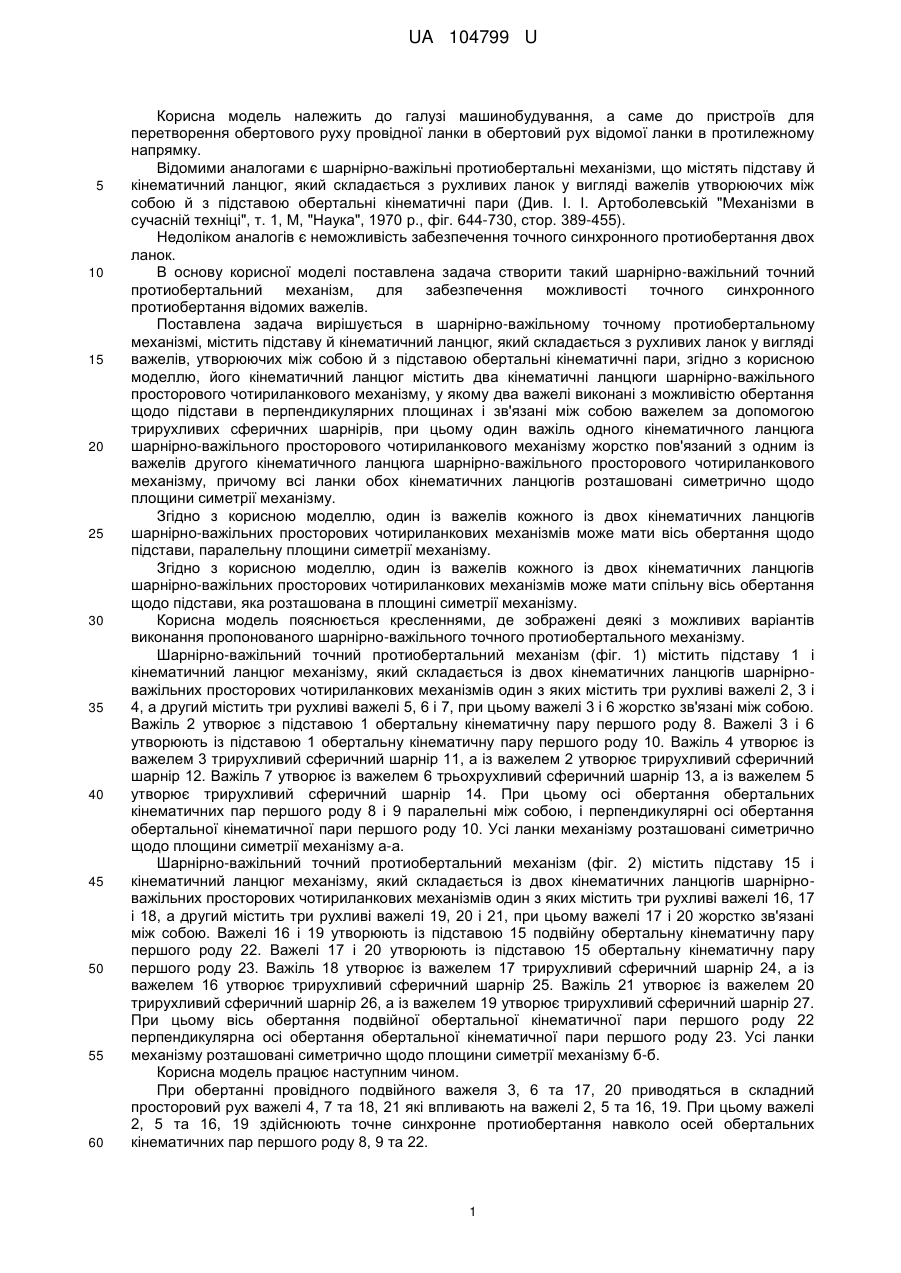
Реферат: Шарнірно-важільний точний протиобертальний механізм містить підставу й кінематичний ланцюг, який складається з рухливих ланок у вигляді важелів, утворюючих між собою й з підставою обертальні кінематичні пари. Його кінематичний ланцюг містить два кінематичні ланцюги шарнірно-важільного просторового чотириланкового механізму, у якому два важелі виконані з можливістю обертання щодо підстави в перпендикулярних площинах і зв'язані між собою важелем за допомогою трирухливих сферичних шарнірів. Один важіль одного кінематичного ланцюга шарнірно-важільного просторового чотириланкового механізму жорстко пов'язаний з одним із важелів другого кінематичного ланцюга шарнірно-важільного просторового чотириланкового механізму. Всі ланки обох кінематичних ланцюгів розташовані симетрично щодо площини симетрії механізму. UA 104799 U (54) ШАРНІРНО-ВАЖІЛЬНИЙ ТОЧНИЙ ПРОТИОБЕРТАЛЬНИЙ МЕХАНІЗМ В.П. САБЛІНА UA 104799 U UA 104799 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі машинобудування, а саме до пристроїв для перетворення обертового руху провідної ланки в обертовий рух відомої ланки в протилежному напрямку. Відомими аналогами є шарнірно-важільні протиобертальні механізми, що містять підставу й кінематичний ланцюг, який складається з рухливих ланок у вигляді важелів утворюючих між собою й з підставою обертальні кінематичні пари (Див. І. І. Артоболевській "Механізми в сучасній техніці", т. 1, М, "Наука", 1970 р., фіг. 644-730, стор. 389-455). Недоліком аналогів є неможливість забезпечення точного синхронного протиобертання двох ланок. В основу корисної моделі поставлена задача створити такий шарнірно-важільний точний протиобертальний механізм, для забезпечення можливості точного синхронного протиобертання відомих важелів. Поставлена задача вирішується в шарнірно-важільному точному протиобертальному механізмі, містить підставу й кінематичний ланцюг, який складається з рухливих ланок у вигляді важелів, утворюючих між собою й з підставою обертальні кінематичні пари, згідно з корисною моделлю, його кінематичний ланцюг містить два кінематичні ланцюги шарнірно-важільного просторового чотириланкового механізму, у якому два важелі виконані з можливістю обертання щодо підстави в перпендикулярних площинах і зв'язані між собою важелем за допомогою трирухливих сферичних шарнірів, при цьому один важіль одного кінематичного ланцюга шарнірно-важільного просторового чотириланкового механізму жорстко пов'язаний з одним із важелів другого кінематичного ланцюга шарнірно-важільного просторового чотириланкового механізму, причому всі ланки обох кінематичних ланцюгів розташовані симетрично щодо площини симетрії механізму. Згідно з корисною моделлю, один із важелів кожного із двох кінематичних ланцюгів шарнірно-важільних просторових чотириланкових механізмів може мати вісь обертання щодо підстави, паралельну площини симетрії механізму. Згідно з корисною моделлю, один із важелів кожного із двох кінематичних ланцюгів шарнірно-важільних просторових чотириланкових механізмів може мати спільну вісь обертання щодо підстави, яка розташована в площині симетрії механізму. Корисна модель пояснюється кресленнями, де зображені деякі з можливих варіантів виконання пропонованого шарнірно-важільного точного протиобертального механізму. Шарнірно-важільний точний протиобертальний механізм (фіг. 1) містить підставу 1 і кінематичний ланцюг механізму, який складається із двох кінематичних ланцюгів шарнірноважільних просторових чотириланкових механізмів один з яких містить три рухливі важелі 2, 3 і 4, а другий містить три рухливі важелі 5, 6 і 7, при цьому важелі 3 і 6 жорстко зв'язані між собою. Важіль 2 утворює з підставою 1 обертальну кінематичну пару першого роду 8. Важелі 3 і 6 утворюють із підставою 1 обертальну кінематичну пару першого роду 10. Важіль 4 утворює із важелем 3 трирухливий сферичний шарнір 11, а із важелем 2 утворює трирухливий сферичний шарнір 12. Важіль 7 утворює із важелем 6 трьохрухливий сферичний шарнір 13, а із важелем 5 утворює трирухливий сферичний шарнір 14. При цьому осі обертання обертальних кінематичних пар першого роду 8 і 9 паралельні між собою, і перпендикулярні осі обертання обертальної кінематичної пари першого роду 10. Усі ланки механізму розташовані симетрично щодо площини симетрії механізму а-а. Шарнірно-важільний точний протиобертальний механізм (фіг. 2) містить підставу 15 і кінематичний ланцюг механізму, який складається із двох кінематичних ланцюгів шарнірноважільних просторових чотириланкових механізмів один з яких містить три рухливі важелі 16, 17 і 18, а другий містить три рухливі важелі 19, 20 і 21, при цьому важелі 17 і 20 жорстко зв'язані між собою. Важелі 16 і 19 утворюють із підставою 15 подвійну обертальну кінематичну пару першого роду 22. Важелі 17 і 20 утворюють із підставою 15 обертальну кінематичну пару першого роду 23. Важіль 18 утворює із важелем 17 трирухливий сферичний шарнір 24, а із важелем 16 утворює трирухливий сферичний шарнір 25. Важіль 21 утворює із важелем 20 трирухливий сферичний шарнір 26, а із важелем 19 утворює трирухливий сферичний шарнір 27. При цьому вісь обертання подвійної обертальної кінематичної пари першого роду 22 перпендикулярна осі обертання обертальної кінематичної пари першого роду 23. Усі ланки механізму розташовані симетрично щодо площини симетрії механізму б-б. Корисна модель працює наступним чином. При обертанні провідного подвійного важеля 3, 6 та 17, 20 приводяться в складний просторовий рух важелі 4, 7 та 18, 21 які впливають на важелі 2, 5 та 16, 19. При цьому важелі 2, 5 та 16, 19 здійснюють точне синхронне протиобертання навколо осей обертальних кінематичних пар першого роду 8, 9 та 22. 1 UA 104799 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 1. Шарнірно-важільний точний протиобертальний механізм, що містить підставу й кінематичний ланцюг, який складається з рухливих ланок у вигляді важелів, утворюючих між собою й з підставою обертальні кінематичні пари, який відрізняється тим, що його кінематичний ланцюг містить два кінематичні ланцюги шарнірно-важільного просторового чотириланкового механізму, у якому два важелі виконані з можливістю обертання щодо підстави в перпендикулярних площинах і зв'язані між собою важелем за допомогою трирухливих сферичних шарнірів, при цьому один важіль одного кінематичного ланцюга шарнірно-важільного просторового чотириланкового механізму жорстко пов'язаний з одним із важелів другого кінематичного ланцюга шарнірно-важільного просторового чотириланкового механізму, причому всі ланки обох кінематичних ланцюгів розташовані симетрично щодо площини симетрії механізму. 2. Механізм за п. 1, який відрізняється тим, що один із важелів кожного з двох кінематичних ланцюгів шарнірно-важільних просторових чотириланкових механізмів має вісь обертання щодо підстави, паралельну площини симетрії механізму. 3. Механізм за п. 1, який відрізняється тим, що один із важелів кожного з двох кінематичних ланцюгів шарнірно-важільних просторових чотириланкових механізмів має загальну вісь обертання щодо підстави, яка розташована в площині симетрії механізму. Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюSablin Viktor Petrovych
Автори російськоюСаблин Виктор Петрович
МПК / Мітки
МПК: F16H 21/26, F16C 3/00, F16H 51/00
Мітки: сабліна, в.п, механізм, протиобертальний, точний, шарнірно-важільний
Код посилання
<a href="https://ua.patents.su/4-104799-sharnirno-vazhilnijj-tochnijj-protiobertalnijj-mekhanizm-vp-sablina.html" target="_blank" rel="follow" title="База патентів України">Шарнірно-важільний точний протиобертальний механізм в.п. сабліна</a>
Шарнірно-важільний точний прямолінійно-напрямний механізм в.п. сабліна
Номер патенту: 102668
Опубліковано: 10.11.2015
Автор: Саблін Віктор Петрович
МПК: F16H 21/04
Мітки: шарнірно-важільний, сабліна, в.п, прямолінійно-напрямний, точний, механізм
Формула / Реферат:
1. Шарнірно-важільний точний прямолінійно-напрямний механізм, що містить підставу й кінематичний ланцюг, який складається з рухомих ланок у вигляді важелів, утворюючих між собою й з підставою обертальні кінематичні пари, який відрізняється тим, що його кінематичний ланцюг містить щонайменше дві структурні групи ланок, кожна з яких містить щонайменше дві рухомі ланки, які утворюють між собою щонайменше одну обертальну кінематичну пару першого...
Шестиланковий шарнірно-важільний механізм поступального переміщення об’єкта
Номер патенту: 32393
Опубліковано: 12.05.2008
Автори: Амбарцумянц Карен Робертович, Амбарцумянц Роберт Вачаганович
МПК: F16H 21/00
Мітки: переміщення, об'єкта, шарнірно-важільний, механізм, поступального, шестиланковий
Формула / Реферат:
Шестиланковий шарнірно-важільний механізм поступального переміщення об'єкта, що містить кривошип, шатуни, повзуни, об'єкт, що утворює шарнірні з'єднання з шатунами і поступальною парою з повзуном, який відрізняється тим, що об'єкт одним кінцем шарнірно з'єднаний з шатуном кривошипно-повзунного механізму, а іншим кінцем шарнірно з'єднаний з іншим шатуном, що утворює шарнірне з'єднання з повзуном, а лінії, що з'єднують центри шарнірів об'єкта...
Шарнірно-важільний механізм з зупинками

Номер патенту: 44535
Опубліковано: 15.02.2002
Автори: Свєтловський Олександр Борисович, Кіницький Ярослав Тимофійович
МПК: F16H 21/00
Мітки: зупинками, шарнірно-важільний, механізм
Формула / Реферат:
Шарнірно-важільний механізм з зупинками, який має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, який шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом який відрізняється тим, що іншим плечем він зв'язаний з двома або більше: трьома, чотирма, п'ятьма, шістьма шатунами, які відповідно шарнірно зв'язані з повзунами, завдяки чому забезпечується зупинка двох або більше вихідних ланок.
Шарнірно-важільний механізм з двома регульованими зупинками вихідної ланки
Номер патенту: 66042
Опубліковано: 15.04.2004
Автори: Кіницький Ярослав Тимофійович, Харжевський В'ячеслав Олександрович
МПК: F16H 21/00
Мітки: механізм, двома, ланки, зупинками, вихідної, шарнірно-важільний, регульованими
Формула / Реферат:
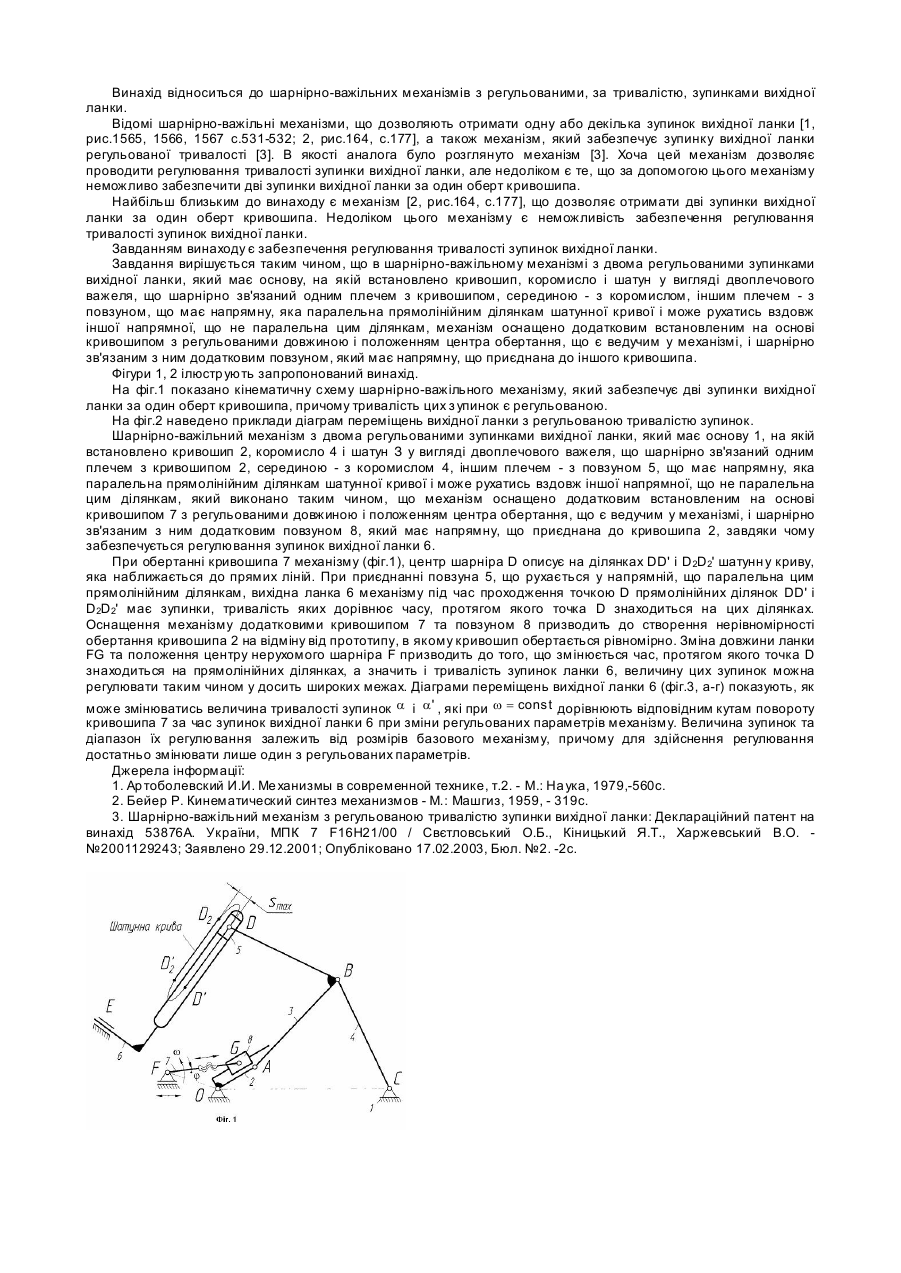
Шарнірно-важільний механізм з двома регульованими зупинками вихідної ланки, який має основу, на якій встановлений кривошип, коромисло і шатун у вигляді двоплечого важеля, що шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом, іншим плечем - з повзуном, що має напрямну, яка паралельна прямолінійним ділянкам шатунної кривої і може рухатись вздовж іншої напрямної, що не паралельна цим ділянкам, який відрізняється тим, що...
Регульований шестиланковий шарнірно-важільний механізм поступального переміщення об’єкта
Номер патенту: 87316
Опубліковано: 10.02.2014
Автори: Амбарцумянц Карен Робертович, Амбарцумянц Роберт Вачаганович, Арабаджи Олена Дмитрівна
МПК: F16H 21/00
Мітки: механізм, об'єкта, регульованій, поступального, шарнірно-важільний, шестиланковий, переміщення
Формула / Реферат:
Шестиланковий важільний механізм поступального переміщення об'єкта, що містить корпус, ведучий вал, кривошип, шатун кривошипно-повзунного механізму, повзун, додатковий шатун, циліндричні пальці, який відрізняється тим, що на циліндричному пальці шарнірного з'єднання шатуна кривошипно-повзунного механізму і повзуна рухливо і співісно з пальцем встановлено черв'ячне колесо, зачеплене з черв'яком, рухливо встановленим на підставі, жорстко...
Попередній патент: Спосіб визначення компенсувальної дози азоту при застосуванні на добриво рослинних решток
Наступний патент: Багатофункціональний посуд
Випадковий патент: Тампонажний розчин