Керований робототехнічний комплекс розвідки та розмінування
Номер патенту: 73976
Опубліковано: 10.10.2012
Автори: Васьківський Михайло Іванович, Рудаков Володимир Іванович, Кучеров Дмитро Павлович, Гусляков Олег Михайлович
Формула / Реферат
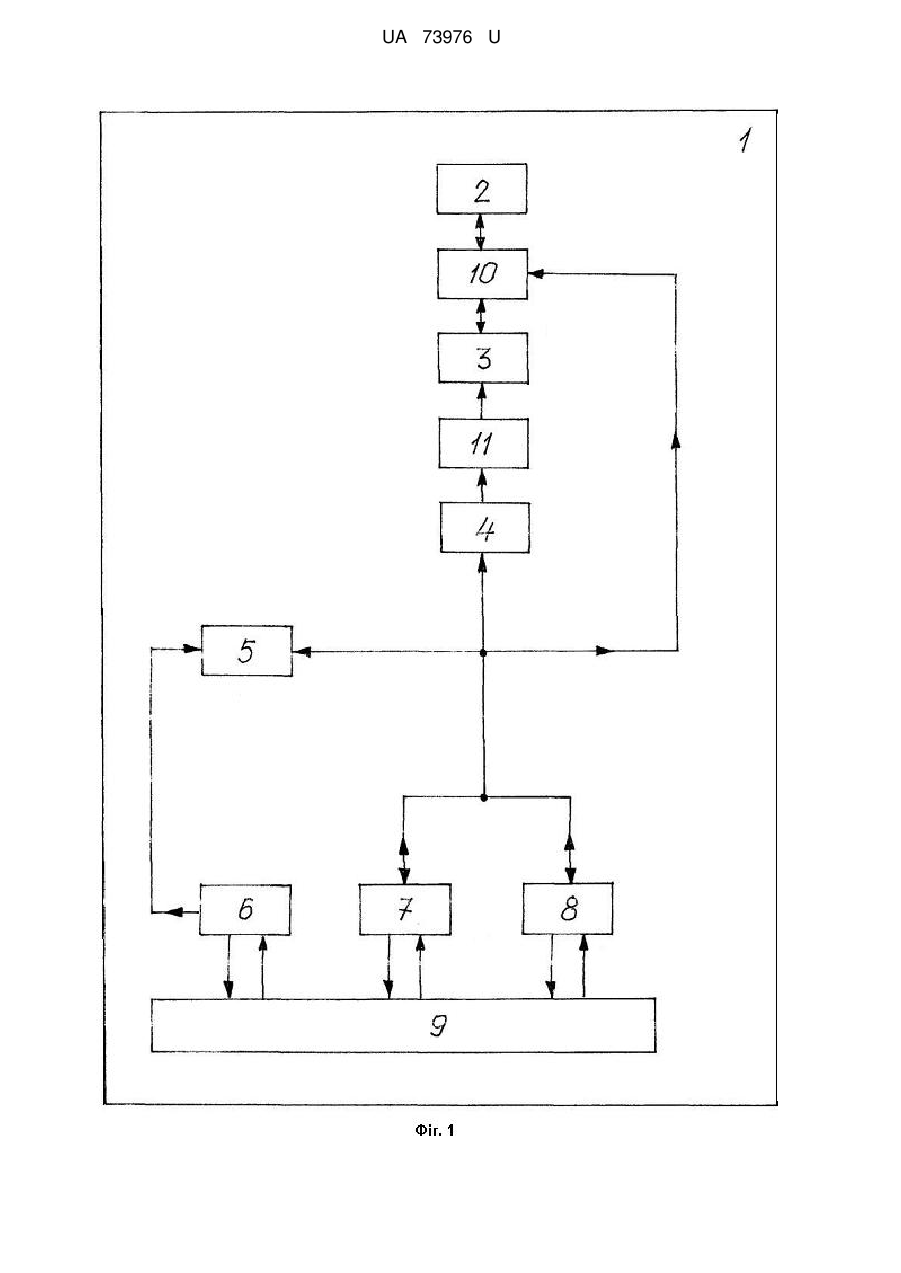
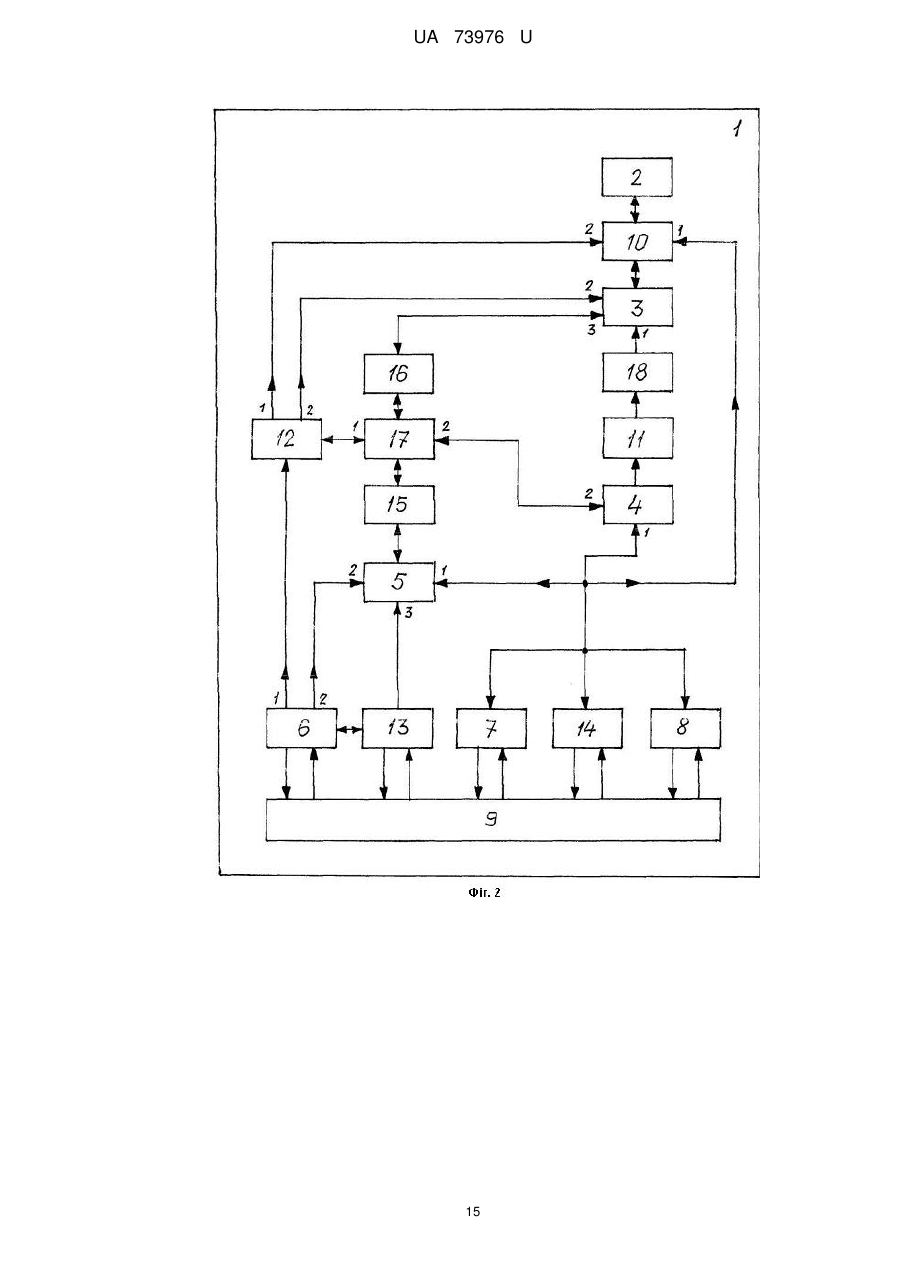
Керований робототехнічний комплекс розвідки та розмінування, що містить систему дистанційного управління, систему планування, управління та синхронізації, систему ідентифікації і визначення типу вибухонебезпечних пристроїв, систему автономного управління рухом шасі, систему управління виконавчими пристроями, телевізійну систему пошуку вибухонебезпечних пристроїв, систему пошуку вибухонебезпечних пристроїв, систему видачі інформаційних параметрів, блок інформаційних каналів зв'язку та блок управління маркуванням місця знаходження вибухонебезпечних пристроїв, при цьому до складу системи дистанційного управління входять пульт управління, монітори/дисплеї, блок зв'язку та блок живлення, до складу системи планування, управління та синхронізації входять блок планування операцій, блок аналізу і формування образів ситуації, блок формування команд управління та блок визначення економічної ефективності, до складу системи ідентифікації і визначення типу вибухонебезпечних пристроїв входять блок ідентифікації і визначення типу вибухової речовини, блок визначення маси/ваги вибухової речовини у вибухонебезпечному пристрої, блок визначення глибини закладання вибухонебезпечних пристроїв, блок визначення марки/типу вибухонебезпечних пристроїв та блок визначення можливого радіуса ураження, до складу системи автономного управління рухом шасі входять блок прогнозування траєкторії руху, блок команд контролю напрямку, блок виявлення та розпізнавання перешкод руху, блок визначення способу/напряму об'їзду перешкод руху, блок визначення можливості подолання перешкод руху, блок переключення режимів руху та блок запису маршруту руху, до складу системи управління виконавчими пристроями входять блок обробки сигналів внутрішніх датчиків та блок аналізу технічного стану виконавчих пристроїв, до складу телевізійної системи пошуку вибухонебезпечних пристроїв входять блок управління телевізійною системою пошуку вибухонебезпечних пристроїв та блок управління засобами освітлення, до складу системи пошуку вибухонебезпечних пристроїв входять блок управління приймально-передавальною антеною пошуку вибухонебезпечних пристроїв та блок вимірювання "сигнал/шум", причому безпосередньо в системі дистанційного управління пульт управління з'єднано з моніторами/дисплеями і виходом блока живлення та двостороннім зв'язком з блоком зв'язку, а в усіх інших системах, що входять до складу керованого робототехнічного комплексу, блоки, що входять до складу відповідних систем, з'єднано між собою безпосередньо в системі двостороннім зв'язком, який відрізняється тим, що до складу комплексу додатково введено систему інформаційних знань, систему обробки сигналів технічного зору, газоаналітичну систему пошуку вибухонебезпечних пристроїв, систему навігації та позиціонування, блок управління джерелами автономного енергопостачання, блок технічної самодіагностики та блок виявлення і блокування радіокерованих підривачів, при цьому до складу системи планування, управління та синхронізації додатково введено блок синхронізації і логічного самонавчання, до складу системи автономного управління рухом шасі додатково введено блок запису маршруту руху та блок визначення пройденої робототехнічним комплексом відстані, до складу телевізійної системи пошуку вибухонебезпечних пристроїв додатково введено блок аналізу помилок розпізнавання вибухонебезпечних пристроїв, встановлених на ґрунт, до складу системи пошуку вибухонебезпечних пристроїв додатково введено блок спецобчислювача та блок аналізу помилок розпізнавання вибухонебезпечних пристроїв, до складу системи інформаційних знань входять блок моделей зовнішнього середовища, блок внутрішньої моделі робототехнічного комплексу, блок моделей типових вибухонебезпечних пристроїв, блок обмежень по технологічних операціях робототехнічного комплексу, блок моделей метеорологічних умов та блок даних по ТТХ робототехнічного комплексу, до складу системи обробки сигналів технічного зору входять блок обробки вертикальних зображень, блок обробки горизонтальних зображень, блок обробки сигналів тактильних сенсорів та блок обробки сигналів дальномірів, до складу газоаналітичної системи пошуку вибухонебезпечних пристроїв входять блок управління хімічними датчиками виявлення молекул вибухової речовини та блок обробки сигналів хімічних датчиків, до складу системи навігації та позиціонування входять блок обробки сигналів GPS приймачів та блок бази картографічної інформації, причому безпосередньо в системі планування, управління та синхронізації блок планування операцій, блок аналізу і формування образів ситуації, блок формування команд управління, блок визначення економічної ефективності та блок синхронізації і логічного самонавчання з'єднано між собою двостороннім зв'язком, а комплект зазначених блоків, відповідно, двостороннім зв'язком з блоком інформаційних каналів зв'язку, з другим виходом системи інформаційних знань через другий вхід, з блоком управління джерелами автономного енергопостачання двостороннім зв'язком через третій вхід та з виходом блока виявлення і блокування радіокерованих підривачів через перший вхід, безпосередньо в системі ідентифікації і визначення типу вибухонебезпечних пристроїв, блок ідентифікації і визначення типу вибухової речовини, блок визначення маси/ваги вибухової речовини у вибухонебезпечному пристрої, блок визначення глибини закладання вибухонебезпечних пристроїв, блок визначення марки/типу вибухонебезпечних пристроїв та блок визначення можливого радіусу ураження з'єднано між собою двостороннім зв'язком, а комплект зазначених блоків, відповідно, з другим входом/виходом блока технічної самодіагностики через свій другий вхід/вихід, з входом блока управління маркуванням місця знаходження вибухонебезпечних пристроїв та пророблених проходів, і також двостороннім зв'язком з телевізійною системою пошуку вибухонебезпечних пристроїв, двоконтурною радіолокаторною системою пошуку вибухонебезпечних пристроїв, блоком інформаційних каналів зв'язку та з газоаналітичною системою пошуку вибухонебезпечних пристроїв, і також з системою автономного управління рухом шасі двостороннім зв'язком з її першим входом, безпосередньо в системі автономного управління рухом шасі блок прогнозування траєкторії руху, блок команд контролю напрямку, блок виявлення та розпізнавання перешкод руху, блок визначення способу/напряму об'їзду перешкод руху, блок визначення можливості подолання перешкод руху, блок переключення режимів руху, блок запису маршруту руху та блок визначення пройденої робототехнічним комплексом відстані з'єднано між собою двостороннім зв'язком, а комплект зазначених блоків, відповідно, двостороннім зв'язком з системою навігації та позиціонування, з другим виходом системи управління виконавчими пристроями через свій другий вхід, з виходом системи обробки сигналів технічного зору через свій другий вхід та двостороннім зв'язком через свій перший вхід, відповідно, з системою ідентифікації і визначення типу вибухонебезпечних пристроїв, телевізійною системою пошуку вибухонебезпечних пристроїв, двоконтурною радіолокаторною системою пошуку вибухонебезпечних пристроїв, блоком інформаційних каналів зв'язку та з газоаналітичною системою пошуку вибухонебезпечних пристроїв, безпосередньо в системі управління виконавчими пристроями блок обробки сигналів внутрішніх датчиків та блок аналізу технічного стану виконавчих пристроїв з'єднано між собою двостороннім зв'язком та, відповідно, з входом системи інформаційних знань через свій перший вихід, з другим входом системи автономного управління рухом шасі через свій другий вихід та двостороннім зв'язком через свій вхід/вихід з входом/виходом системи обробки сигналів технічного зору, безпосередньо в телевізійній системі пошуку вибухонебезпечних пристроїв блок управління телевізійною системою пошуку вибухонебезпечних пристроїв, блок управління засобами освітлення та блок аналізу помилок розпізнавання вибухонебезпечних пристроїв, встановлених на ґрунт з'єднано між собою двостороннім зв'язком, а комплект зазначених блоків, відповідно, двостороннім зв'язком з системою ідентифікації і визначення типу вибухонебезпечних пристроїв, блоком інформаційних каналів зв'язку, газоаналітичною системою пошуку вибухонебезпечних пристроїв і з двоконтурною радіолокаторною системою пошуку вибухонебезпечних пристроїв, та двостороннім зв'язком з системою автономного управління рухом шасі з її першим входом, безпосередньо в двоконтурній радіолокаторній системі пошуку вибухонебезпечних пристроїв блок управління прийомо-передавальною антеною пошуку вибухонебезпечних пристроїв, блок вимірювання "сигнал/шум", блок спецобчислювача та блок аналізу помилок розпізнавання вибухонебезпечних пристроїв з'єднано між собою двостороннім зв'язком, а комплект зазначених блоків, відповідно, двостороннім зв'язком з системою ідентифікації і визначення типу вибухонебезпечних пристроїв, телевізійною системою пошуку вибухонебезпечних пристроїв, блоком інформаційних каналів зв'язку і з газоаналітичною системою пошуку вибухонебезпечних пристроїв, і також двостороннім зв'язком з системою автономного управління рухом шасі з її першим входом, безпосередньо в системі інформаційних знань блок моделей зовнішнього середовища, блок внутрішньої моделі робототехнічного комплексу, блок моделей типових вибухонебезпечних пристроїв, блок обмежень по технологічних операціях робототехнічного комплексу, блок моделей метеорологічних умов та блок даних по ТТХ робототехнічного комплексу з'єднано між собою двостороннім зв'язком, а зазначений комплект блоків, відповідно, з другим входом блока інформаційних каналів зв'язку через свій перший вихід, з другим входом системи планування, управління та синхронізації через свій другий вихід, з першим виходом системи управління виконавчими пристроями та з першим входом/виходом блока технічної самодіагностики через свій вхід/вихід, безпосередньо в системі обробки сигналів технічного зору блок обробки вертикальних зображень, блок обробки горизонтальних зображень, блок обробки сигналів тактильних сенсорів та блок обробки сигналів дальномірів з'єднано між собою двостороннім зв'язком та, відповідно, двостороннім зв'язком з системою управління виконавчими пристроями і з третім входом системи автономного управління рухом шасі, безпосередньо в газоаналітичній системі пошуку вибухонебезпечних пристроїв блок управління хімічними датчиками виявлення молекул вибухової речовини та блок обробки сигналів хімічних датчиків з'єднано між собою двостороннім зв'язком, а комплект зазначених блоків, відповідно, двостороннім зв'язком з системою ідентифікації і визначення типу вибухонебезпечних пристроїв, блоком інформаційних каналів зв'язку, телевізійною системою пошуку вибухонебезпечних пристроїв і двоконтурною радіолокаторною системою пошуку вибухонебезпечних пристроїв, і також двостороннім зв'язком з системою автономного управління рухом шасі з її першим входом, безпосередньо в системі навігації та позиціонування блок обробки сигналів GPS приймачів та блок бази картографічної інформації з'єднано між собою двостороннім зв'язком та, відповідно, двостороннім зв'язком з системою автономного управління рухом шасі і з блоком технічної самодіагностики.
Текст
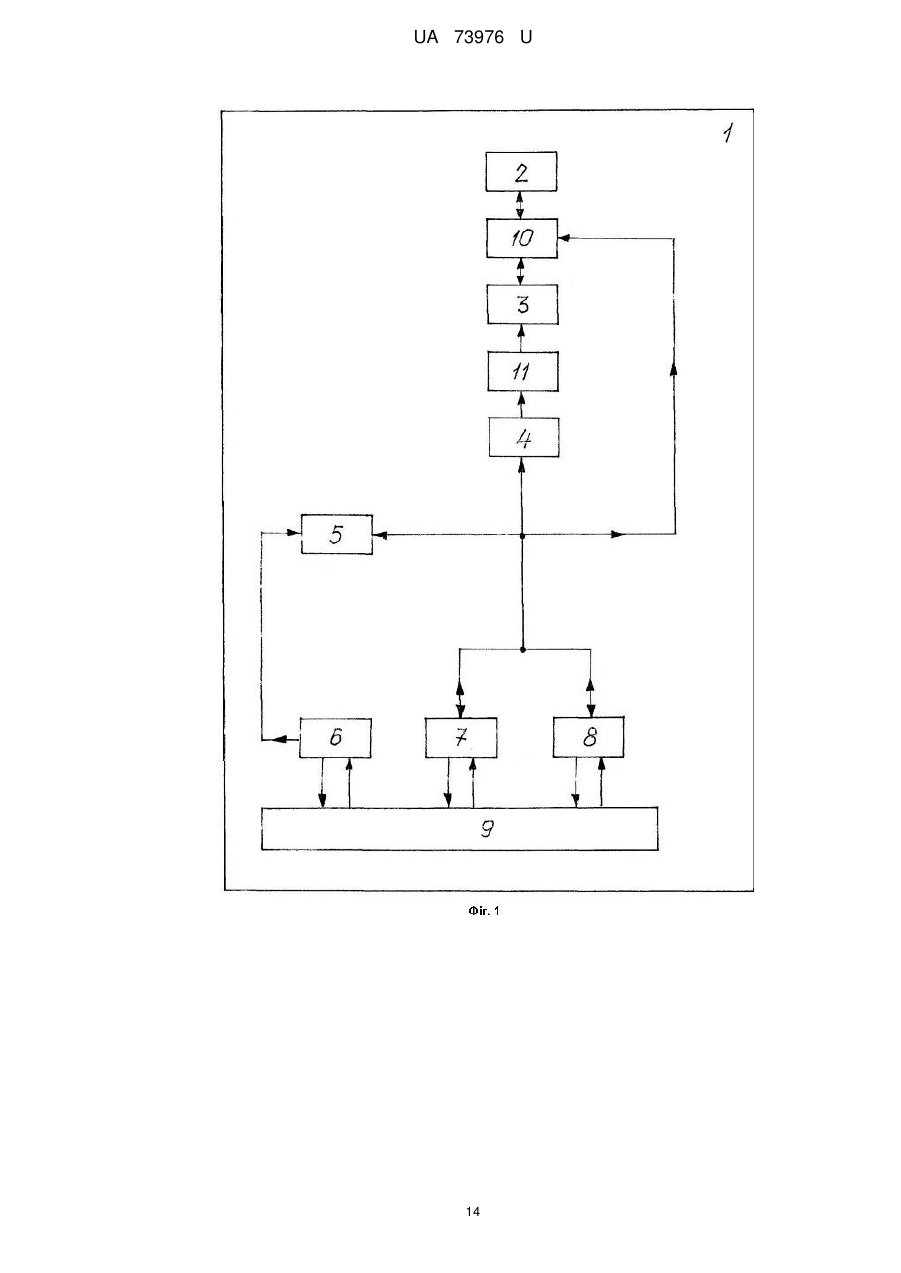
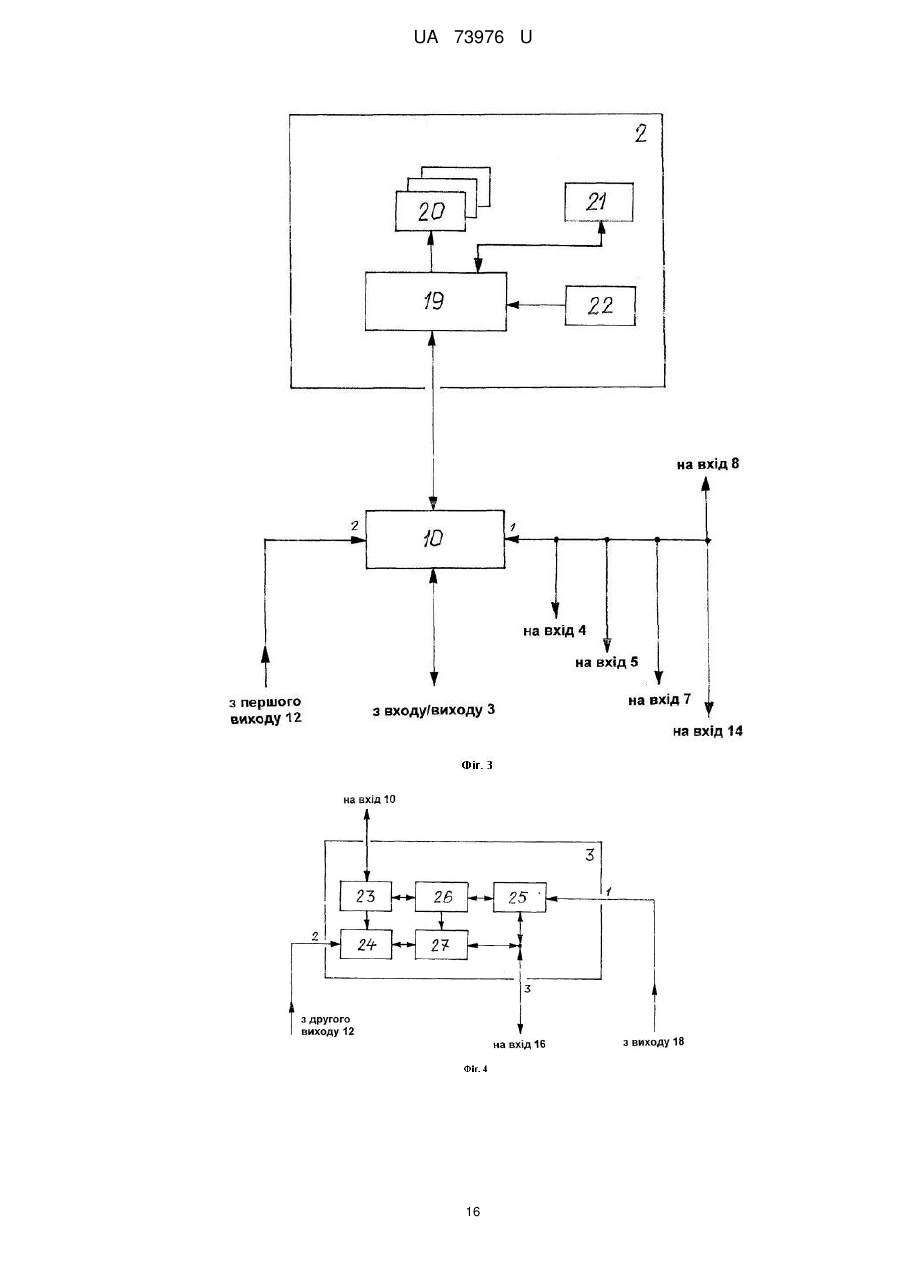
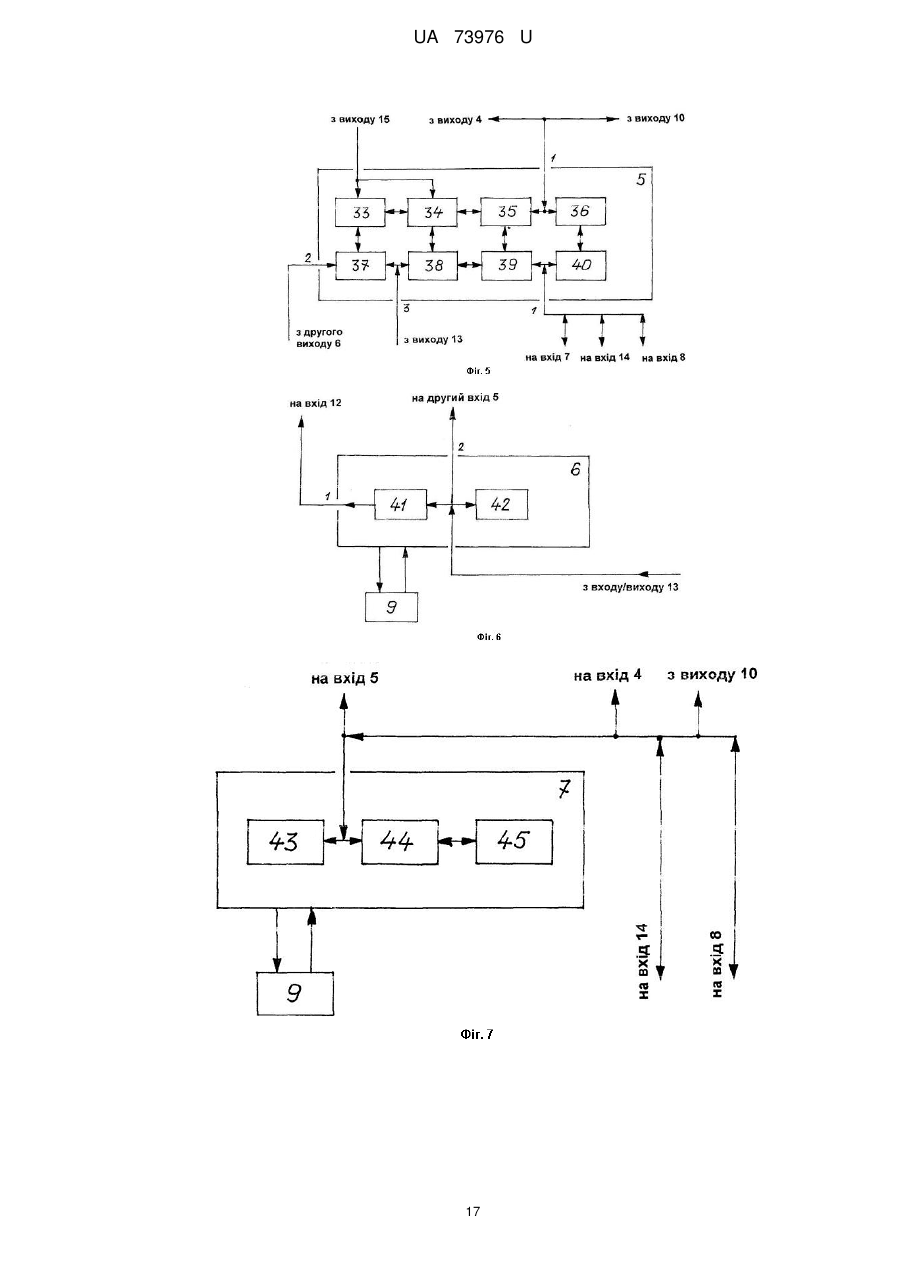
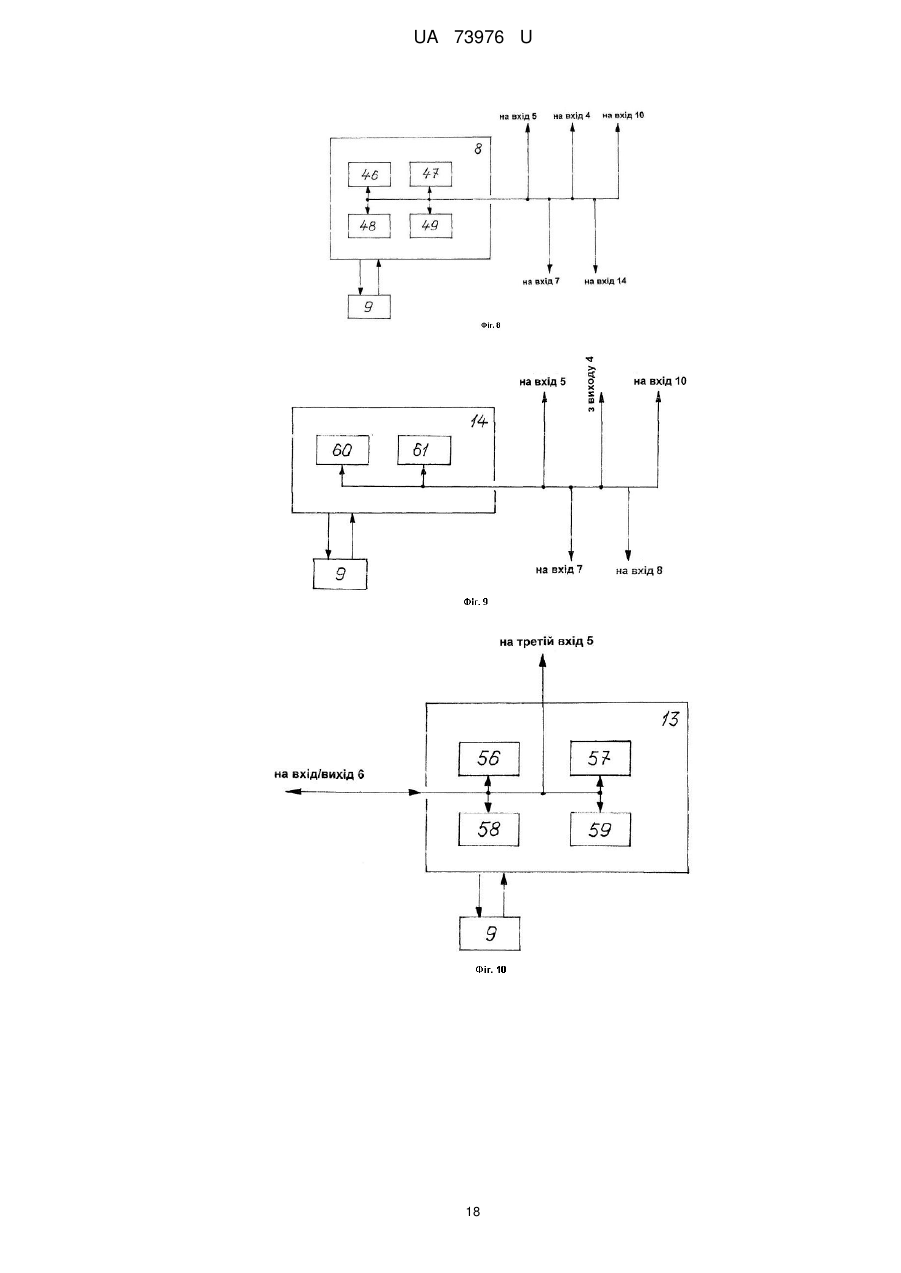
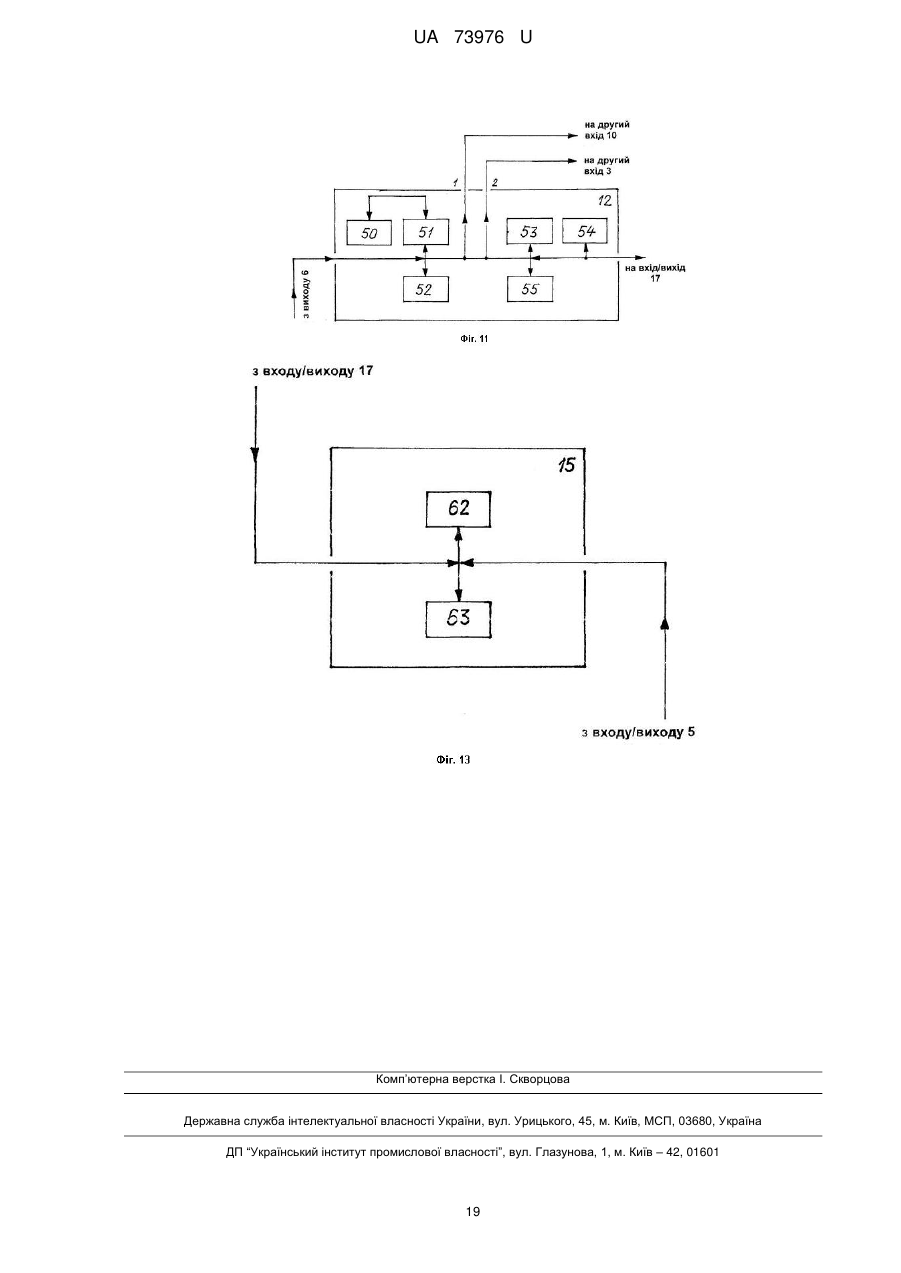
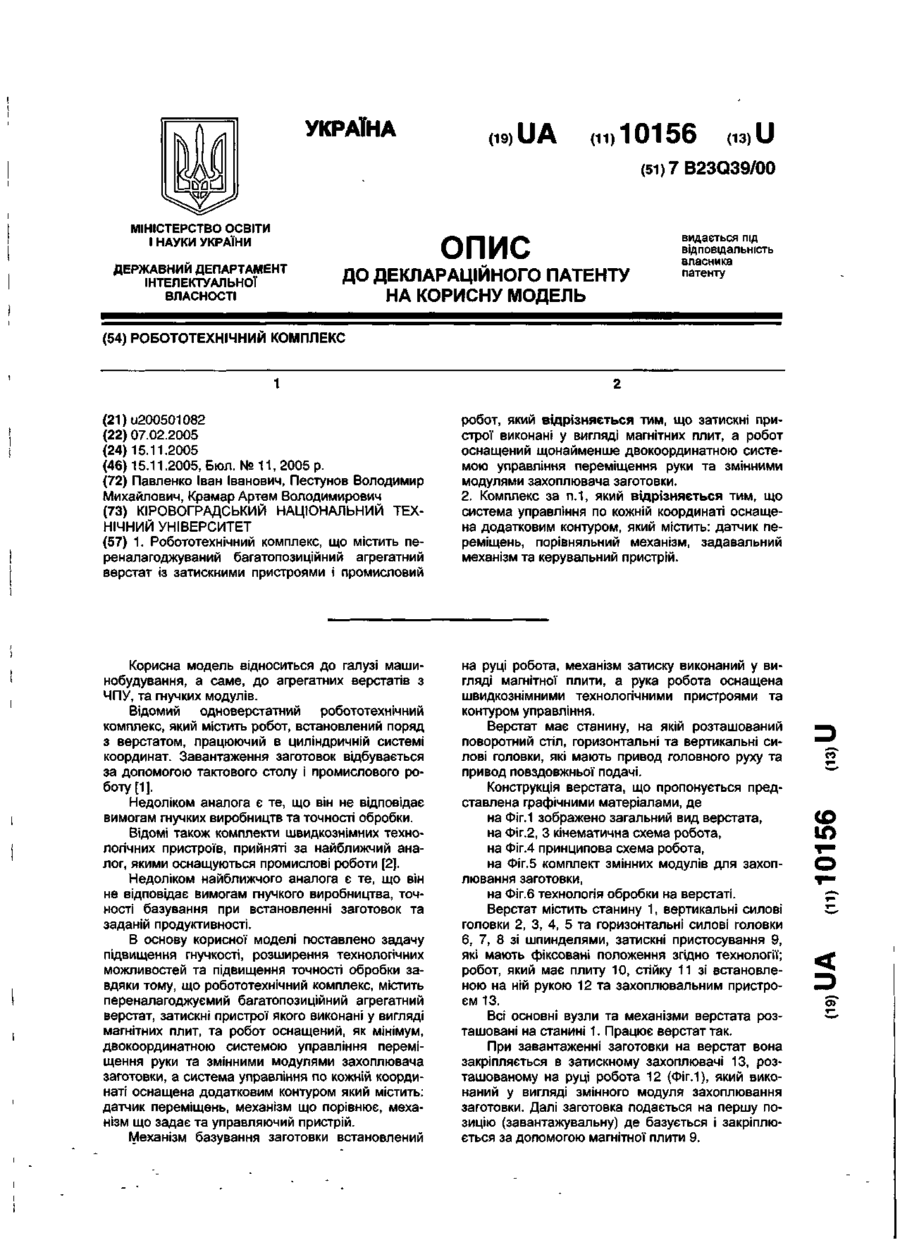
обробки горизонтальних зображень, блок (58) обробки сигналів тактильних сенсорів та блок (59) обробки сигналів дальномірів з'єднано між собою двостороннім зв'язком та, відповідно, з системою (6) управління виконавчими пристроями (двостороннім зв'язком) та з третім входом системи (5) автономного управління рухом шасі; - безпосередньо в газоаналітичній системі (14) пошуку вибухонебезпечних пристроїв (див. блок-схему на Фіг. 9) блок (60) управління хімічними датчиками виявлення молекул вибухової речовини та блок (61) обробки сигналів хімічних датчиків з'єднано між собою двостороннім зв'язком та, відповідно, з системами (позиції 4, 10, 7, 8 - двостороннім зв'язком) та з системою (5) автономного управління рухом шасі (двостороннім зв'язком з її першим входом); - безпосередньо в системі (15) навігації та позиціонування (див. блок-схему на Фіг. 13) блок (62) обробки сигналів GPS приймачів та блок (63) бази картографічної інформації з'єднано між собою двостороннім зв'язком та, відповідно, з системою (5) автономного управління рухом шасі та з блоком (17) технічної самодіагностики (двостороннім зв'язком). Керований робототехнічний комплекс (1) розвідки та розмінування, що заявляється (див. блок-схему на Фіг. 2), працює таким чином. При підготовці керованого робототехнічного комплексу (1) до застосування необхідна база даних завантажується в систему 12 інформаційних знань, а цифрові карти - в блок 63 бази картографічної інформації, при цьому здійснюється прив'язка керованого робототехнічного комплексу (1) до місцевості за допомогою системи 15 навігації та позиціонування (до складу якої входять блок 62 обробки сигналів GPS приймачів та блок 63 бази картографічної інформації - див. блок-схему на Фіг. 13). З початком роботи оператор за допомогою системи 2 дистанційного управління через блок 10 інформаційних каналів зв'язку вводить координати району проведення розвідки і 8 UA 73976 U 5 10 15 20 25 30 35 40 45 50 55 60 розмінування в систему 5 автономного управління рухом шасі і дає команду керованому робототехнічному комплексу (1) самостійно вирушити у вказаний район. За допомогою системи 3 планування, управління та синхронізації, блока 50 моделей зовнішнього середовища, блока 33 прогнозування траєкторії руху та блока 26 визначення економічної ефективності розраховується оптимальний маршрут руху керованого робототехнічного комплексу (1) і блок 34 команд контролю напрямку дає команду системі 6 управління виконавчими пристроями рухатися по розрахованому маршруту. Під час руху керованого робототехнічного комплексу (1) по маршруту руху (представленого системою 9 видачі інформаційних параметрів) здійснюється безперервний моніторинг навколишнього середовища приладами системи 13 обробки сигналів технічного зору, а саме блоком 56 обробки вертикальних зображень, блоком 57 обробки горизонтальних зображень, блоком 58 обробки сигналів тактильних сенсорів та блоком 59 обробки сигналів дальномірів (див. блок-схему на Фіг. 10). Інформація від зазначених блоків (позиції 56, 57, 58 і 59) системи 13 обробки сигналів технічного зору подається на блок 35 виявлення та розпізнавання перешкод руху (що входить до складу системи 5 автономного управління рухом шасі, а саме, через її третій вхід), та (через систему 6 управління виконавчими пристроями з її першого виходу) на входи блока 50 моделей зовнішнього середовища, блока 51 внутрішньої моделі РТК, блока 54 моделей метеорологічних умов, блока 55 даних по ТТХ РТК (що входять до складу системи 12 інформаційних знань). В результаті роботи зазначених блоків (позиції 50...55 - див. блок-схему на Фіг. 11) сигнали опрацьовуються та подаються на блок 36 визначення способу/напряму об'їзду перешкод руху і блок 37 визначення можливості подолання перешкод руху (що входять до складу системи 5 автономного управління рухом шасі) - див. блок-схему на Фіг. 2 та блок-схему на Фіг. 5. Враховуючи технічні можливості керованого робототехнічного комплексу (1) та характер виявленої перешкоди руху здійснюється подолання або об'їзд перешкоди і формування уточненого маршруту блоком 33 прогнозування траєкторії руху (що входить до складу системи 5 автономного управління рухом шасі) та вибирається швидкісний режим блоком 38 переключення режимів руху (що входить до складу системи 5 автономного управління рухом шасі) (див. блок-схему на Фіг. 5). При цьому, для контролю за виконанням управляючих сигналів і технічним станом керованого робототехнічного комплексу (1) під час його руху по маршруту сигнали від блоку 16 управління джерелами автономного енергопостачання (через блок 17 технічної самодіагностики і систему 15 навігації та позиціонування), від блоку 41 обробки сигналів внутрішніх датчиків та від блоку 42 аналізу технічного стану виконавчих пристроїв (що входять до складу системи 6 управління виконавчими пристроями) подаються на блок 39 запису маршруту руху і стану виконавчих пристроїв та на блок 40 визначення пройденої керованим робототехнічним комплексом (1) відстані (що входять до складу системи 5 автономного управління рухом шасі), при цьому сигнали від блоків (позиції 41 і 42) системи 6 управління виконавчими пристроями подаються з другого виходу зазначеної системи 6 управління виконавчими пристроями на другий вхід системи 5 автономного управління рухом шасі (див. блок-схеми, відповідно, на Фіг. 2, на Фіг. 6 та на Фіг. 5). Інформація про загальний технічний стан керованого робототехнічного комплексу (1) та його систем оброблюється в блоці 17 технічної самодіагностики, в якому визначається стан окремих елементів і здатність керованого робототехнічного комплексу (1) виконувати певні завдання (технологічні операції) та передається в блок 23 планування операцій, блок 24 аналізу і формування образів ситуацій, блок 25 формування команд управління, блок 27 синхронізації і логічного самонавчання (що входять до складу системи 3 планування, управління та синхронізації - див. блок-схему на Фіг. 4). Завдяки зазначеним блокам (позиції 23...27) здійснюється загальне управління і контроль за функціонуванням керованого робототехнічного комплексу (1). При прибутті керованого робототехнічного комплексу (1) у заданий район системою 15 навігації та позиціонування уточнюються необхідні координати на місцевості та подальший маршрут рух. Далі починається рух керованого робототехнічного комплексу (1) за вказаним вище способом (принципом) та одночасно вмикаються три дублюючі системи пошуку вибухонебезпечних пристроїв, в яких застосовано різні методи виявлення вибухонебезпечних пристроїв, а саме: - електромагнітний метод виявлення (пошуку) заглиблених у ґрунт вибухонебезпечних пристроїв застосовано у двоконтурній радіолокаторній системі 8 пошуку вибухонебезпечних пристроїв (див. блок-схему на Фіг. 8), яка складається з блока 46 управління приймально 9 UA 73976 U 5 10 15 20 25 30 35 40 45 50 55 60 передавальною антеною пошуку вибухонебезпечних пристроїв, блока 48 спецобчислювача, блока 47 вимірювання «сигнал/шум», блока 49 аналізу помилок розпізнавання вибухонебезпечних пристроїв; - оптичний метод виявлення для пошуку вибухонебезпечних пристроїв, що знаходяться на поверхні ґрунту застосовано у телевізійній системі 7 пошуку вибухонебезпечних пристроїв (див. блок-схему на Фіг. 7), яка складається з блока 43 управління телевізійною системою пошуку вибухонебезпечних пристроїв, блока 44 управління засобами освітлення, блока 45 аналізу помилок розпізнавання вибухонебезпечних пристроїв встановлених на ґрунт; - газоаналітичний метод виявлення молекул вибухової речовини у повітрі застосовано у газоанлітичній системі 14 пошуку вибухонебезпечних пристроїв (див. блок-схему на Фіг. 9), яка складається з блока 60 управління хімічними датчиками виявлення молекул вибухової речовини та блока 61 обробки сигналів хімічних датчиків. При цьому сигнали від зазначених вище систем (позиції 7, 8 і 14) пошуку вибухонебезпечних пристроїв подаються на систему 5 автономного управління рухом шасі, блок 10 інформаційних каналів зв'язку та систему 4 ідентифікації і визначення типу вибухонебезпечних пристроїв. Зазначена система 4 ідентифікації і визначення типу вибухонебезпечних пристроїв здійснює автоматизовану обробку отриманої інформації з метою визначення характеристик вибухонебезпечного пристрою та можливих наслідків несанкціонованого вибуху і складається з: блока 28 ідентифікації і визначення типу вибухової речовини, блока 29 визначення маси/ваги вибухової речовини у вибухонебезпечному пристрої, блока 30 визначення глибини закладання вибухонебезпечних пристроїв, блоку 31 визначення марки/типу вибухонебезпечних пристроїв та блока 32 визначення можливого радіуса ураження. Для ідентифікації вибухонебезпечного пристрою, вибору можливості і оптимального способу знешкодження вибухонебезпечного пристрою система 4 ідентифікації і визначення типу вибухонебезпечних пристроїв здійснює обмін інформації через блок 17 технічної самодіагностики з блоком 52 моделей типових вибухонебезпечних пристроїв, блоком 53 обмежень по технологічних операціях робототехнічного комплексу, блоками (позиції 50, 51, 54 та 55, що входять до складу системи 12 інформаційних знань) та при визначенні точного місця знаходження вибухонебезпечного пристрою подає сигнал до системи 3 планування, управління та синхронізації через блок 11 управління маркуванням місця знаходження вибухонебезпечних пристроїв та пророблених проходів і блок 18 виявлення і блокування радіокерованих підривачів. Інформаційні сигнали про стан і процес функціонування робототехнічного комплексу від систем (позиції 12, 3, 5, 4 - див. блок-схему на Фіг. 2), телевізійної системи 7 пошуку вибухонебезпечних пристроїв, газоаналітичної системи 14 пошуку вибухонебезпечних пристроїв та системи 8 пошуку вибухонебезпечних пристроїв через блок 10 інформаційних каналів зв'язку подаються для відображення оператору робототехнічного комплексу на систему 2 дистанційного управління (див. блок-схему на Фіг. 2), яка складається (див. блок-схему на Фіг. 3) з пульта 19 управління, моніторів/дисплеїв 20, блока 21 зв'язку і блока 22 живлення, при цьому при спрацюванні однієї з систем пошуку вибухонебезпечних пристроїв, а саме або телевізійної системи 7 пошуку вибухонебезпечних пристроїв, або газоаналітичної системи 14 пошуку вибухонебезпечних пристроїв, або двоконтурної радіолокаторної системи 8 пошуку вибухонебезпечних пристроїв, система 5 автономного управління рухом шасі автоматично зупиняє рух керованого робототехнічного комплексу (1). Вони ж подають сигнал оператору на систему 2 дистанційного управління. Системи (позиції 7, 14, 8, 4 - див. блок-схему на Фіг. 2) здійснюють поглиблений аналіз даних та через систему 3 планування, управління та синхронізації формують і надають пропозиції оператору щодо типу вибухонебезпечного пристрою та оптимальних методів їх знешкодження. Оператор, використовуючи отриману інформацію, а також фото/відео зображення приймає остаточне рішення про метод знешкодження (знищення) вибухонебезпечного пристрою. Знешкодження вибухонебезпечного пристрою проводиться дистанційно, за одним з алгоритмів, запропонованих керованим робототехнічним комплексом (1), чи методом (знешкодження або знищення на місці; переведення в безпечний стан, транспортування та подальше знищення вибухонебезпечного пристрою) завдяки чому зменшується фактор ризику та скоєння помилок. Якщо вибухонебезпечний пристрій за відомими даними неможливо знищити на місці, або якісно ідентифікувати вибухонебезпечний пристрій дистанційно - проводиться маркування місця знаходження вибухонебезпечного пристрою, збереження цифрових координат, об'їзд небезпечного місця та продовження пошуку по запланованому маршруту. Виходячи з послідовності дій алгоритм виконання розвідки та знешкодження за допомогою дистанційних засобів розмінування вибухонебезпечних пристроїв може стати основою 10 UA 73976 U 5 10 15 20 25 30 35 подальших розробок вітчизняних технічних засобів для безпечного та дистанційного знешкодження вибухонебезпечних пристроїв будь-яких типів. При цьому найбільш оптимальним є створення керованих робототехнічних пристроїв з комбінованою системою управління, коли більшість операцій буде виконуватись в автоматичному режимі з втручанням оператора у випадку прийняття складних рішень та адекватних дій робототехнічним комплексом. Система управління робототехнічним комплексом розроблена на основі апарата нечітких множин та адаптивних алгоритмів, що забезпечить необхідний рівень адаптування в змінюваному середовищі та самонавчання в процесі функціонування зазначеного вище керованого робототехнічного комплексу (чи пристрою). Керований робототехнічний комплекс при пошуку і знешкодженні вибухонебезпечних пристроїв характеризується позитивними сторонами, на відміну від відомих способів: - можливістю встановлення на одному зразку більшої кількості приладів і датчиків (сенсорні, електромагнітні, оптичні, звукові, газоаналітичні), їх швидкої заміни в залежності від умов навколишнього середовища що надає більшу інформацію про тип і стан вибухонебезпечного пристрою; - використання певної бази інформації за фотоданими, хімічному складу, масо-габаритними показниками щодо типу вибухонебезпечних пристроїв, яка оброблюється диспетчером та передається в керований робототехнічний комплекс для їх знешкодження; - при несанкціонованому підриву вибухонебезпечних пристроїв виникає менший об'єм і ступінь ушкодження керованого робототехнічного комплексу (пристрою) та більше можливостей його відновлення ніж при підриві озброєння та військової техніки; - можливість самонавчання керованого робототехнічного комплексу (чи пристрою) в процесі роботи та подальшого удосконалення параметрів його функціонування. Створення керованого робототехнічного комплексу (конструкція якого заявляється) обґрунтовано раціональністю розробленої моделі його застосування у вигляді адаптивного автомату для формалізації процесу його функціонування в реальних умовах. Джерела інформації: 1. Журнал «Мехатроника, автоматизация, управление». № 3, 2007, Волгоградский государственный технический университет. Издательство «Новые технологии», Статья «Мобильный робототехнический комплекс для гуманитарного разминирования». Авторы: Брискин Е.С., Жога В.В., Покровский Д.Н., Шурыгин В.А. (стр. 28-37). 2. Патент Російської Федерації № 2116608 "Мобильный носитель поискового оборудования и способ управления им" від 27.07.1998 року, МПК 6 F 41 Η 11/16, В 60 G 23/00, В 62 Μ27/00 аналог. 3. Патент Російської Федерації № 2168146 "Мобильный носитель поискового оборудования и способ управления им" від 27.05.2001 року, МПК 8 F 41 Η 11/16 - прототип. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 55 60 Керований робототехнічний комплекс розвідки та розмінування, що містить систему дистанційного управління, систему планування, управління та синхронізації, систему ідентифікації і визначення типу вибухонебезпечних пристроїв, систему автономного управління рухом шасі, систему управління виконавчими пристроями, телевізійну систему пошуку вибухонебезпечних пристроїв, систему пошуку вибухонебезпечних пристроїв, систему видачі інформаційних параметрів, блок інформаційних каналів зв'язку та блок управління маркуванням місця знаходження вибухонебезпечних пристроїв, при цьому до складу системи дистанційного управління входять пульт управління, монітори/дисплеї, блок зв'язку та блок живлення, до складу системи планування, управління та синхронізації входять блок планування операцій, блок аналізу і формування образів ситуації, блок формування команд управління та блок визначення економічної ефективності, до складу системи ідентифікації і визначення типу вибухонебезпечних пристроїв входять блок ідентифікації і визначення типу вибухової речовини, блок визначення маси/ваги вибухової речовини у вибухонебезпечному пристрої, блок визначення глибини закладання вибухонебезпечних пристроїв, блок визначення марки/типу вибухонебезпечних пристроїв та блок визначення можливого радіуса ураження, до складу системи автономного управління рухом шасі входять блок прогнозування траєкторії руху, блок команд контролю напрямку, блок виявлення та розпізнавання перешкод руху, блок визначення способу/напряму об'їзду перешкод руху, блок визначення можливості подолання перешкод руху, блок переключення режимів руху та блок запису маршруту руху, до складу системи управління виконавчими пристроями входять блок обробки сигналів внутрішніх датчиків та блок аналізу технічного стану виконавчих пристроїв, до складу телевізійної системи пошуку 11 UA 73976 U 5 10 15 20 25 30 35 40 45 50 55 60 вибухонебезпечних пристроїв входять блок управління телевізійною системою пошуку вибухонебезпечних пристроїв та блок управління засобами освітлення, до складу системи пошуку вибухонебезпечних пристроїв входять блок управління приймально-передавальною антеною пошуку вибухонебезпечних пристроїв та блок вимірювання "сигнал/шум", причому безпосередньо в системі дистанційного управління пульт управління з'єднано з моніторами/дисплеями і виходом блока живлення та двостороннім зв'язком з блоком зв'язку, а в усіх інших системах, що входять до складу керованого робототехнічного комплексу, блоки, що входять до складу відповідних систем, з'єднано між собою безпосередньо в системі двостороннім зв'язком, який відрізняється тим, що до складу комплексу додатково введено систему інформаційних знань, систему обробки сигналів технічного зору, газоаналітичну систему пошуку вибухонебезпечних пристроїв, систему навігації та позиціонування, блок управління джерелами автономного енергопостачання, блок технічної самодіагностики та блок виявлення і блокування радіокерованих підривачів, при цьому до складу системи планування, управління та синхронізації додатково введено блок синхронізації і логічного самонавчання, до складу системи автономного управління рухом шасі додатково введено блок запису маршруту руху та блок визначення пройденої робототехнічним комплексом відстані, до складу телевізійної системи пошуку вибухонебезпечних пристроїв додатково введено блок аналізу помилок розпізнавання вибухонебезпечних пристроїв, встановлених на ґрунт, до складу системи пошуку вибухонебезпечних пристроїв додатково введено блок спецобчислювача та блок аналізу помилок розпізнавання вибухонебезпечних пристроїв, до складу системи інформаційних знань входять блок моделей зовнішнього середовища, блок внутрішньої моделі робототехнічного комплексу, блок моделей типових вибухонебезпечних пристроїв, блок обмежень по технологічних операціях робототехнічного комплексу, блок моделей метеорологічних умов та блок даних по ТТХ робототехнічного комплексу, до складу системи обробки сигналів технічного зору входять блок обробки вертикальних зображень, блок обробки горизонтальних зображень, блок обробки сигналів тактильних сенсорів та блок обробки сигналів дальномірів, до складу газоаналітичної системи пошуку вибухонебезпечних пристроїв входять блок управління хімічними датчиками виявлення молекул вибухової речовини та блок обробки сигналів хімічних датчиків, до складу системи навігації та позиціонування входять блок обробки сигналів GPS приймачів та блок бази картографічної інформації, причому безпосередньо в системі планування, управління та синхронізації блок планування операцій, блок аналізу і формування образів ситуації, блок формування команд управління, блок визначення економічної ефективності та блок синхронізації і логічного самонавчання з'єднано між собою двостороннім зв'язком, а комплект зазначених блоків, відповідно, двостороннім зв'язком з блоком інформаційних каналів зв'язку, з другим виходом системи інформаційних знань через другий вхід, з блоком управління джерелами автономного енергопостачання двостороннім зв'язком через третій вхід та з виходом блока виявлення і блокування радіокерованих підривачів через перший вхід, безпосередньо в системі ідентифікації і визначення типу вибухонебезпечних пристроїв, блок ідентифікації і визначення типу вибухової речовини, блок визначення маси/ваги вибухової речовини у вибухонебезпечному пристрої, блок визначення глибини закладання вибухонебезпечних пристроїв, блок визначення марки/типу вибухонебезпечних пристроїв та блок визначення можливого радіусу ураження з'єднано між собою двостороннім зв'язком, а комплект зазначених блоків, відповідно, з другим входом/виходом блока технічної самодіагностики через свій другий вхід/вихід, з входом блока управління маркуванням місця знаходження вибухонебезпечних пристроїв та пророблених проходів, і також двостороннім зв'язком з телевізійною системою пошуку вибухонебезпечних пристроїв, двоконтурною радіолокаторною системою пошуку вибухонебезпечних пристроїв, блоком інформаційних каналів зв'язку та з газоаналітичною системою пошуку вибухонебезпечних пристроїв, і також з системою автономного управління рухом шасі двостороннім зв'язком з її першим входом, безпосередньо в системі автономного управління рухом шасі блок прогнозування траєкторії руху, блок команд контролю напрямку, блок виявлення та розпізнавання перешкод руху, блок визначення способу/напряму об'їзду перешкод руху, блок визначення можливості подолання перешкод руху, блок переключення режимів руху, блок запису маршруту руху та блок визначення пройденої робототехнічним комплексом відстані з'єднано між собою двостороннім зв'язком, а комплект зазначених блоків, відповідно, двостороннім зв'язком з системою навігації та позиціонування, з другим виходом системи управління виконавчими пристроями через свій другий вхід, з виходом системи обробки сигналів технічного зору через свій другий вхід та двостороннім зв'язком через свій перший вхід, відповідно, з системою ідентифікації і визначення типу вибухонебезпечних пристроїв, телевізійною системою пошуку вибухонебезпечних пристроїв, двоконтурною 12 UA 73976 U 5 10 15 20 25 30 35 40 45 радіолокаторною системою пошуку вибухонебезпечних пристроїв, блоком інформаційних каналів зв'язку та з газоаналітичною системою пошуку вибухонебезпечних пристроїв, безпосередньо в системі управління виконавчими пристроями блок обробки сигналів внутрішніх датчиків та блок аналізу технічного стану виконавчих пристроїв з'єднано між собою двостороннім зв'язком та, відповідно, з входом системи інформаційних знань через свій перший вихід, з другим входом системи автономного управління рухом шасі через свій другий вихід та двостороннім зв'язком через свій вхід/вихід з входом/виходом системи обробки сигналів технічного зору, безпосередньо в телевізійній системі пошуку вибухонебезпечних пристроїв блок управління телевізійною системою пошуку вибухонебезпечних пристроїв, блок управління засобами освітлення та блок аналізу помилок розпізнавання вибухонебезпечних пристроїв, встановлених на ґрунт з'єднано між собою двостороннім зв'язком, а комплект зазначених блоків, відповідно, двостороннім зв'язком з системою ідентифікації і визначення типу вибухонебезпечних пристроїв, блоком інформаційних каналів зв'язку, газоаналітичною системою пошуку вибухонебезпечних пристроїв і з двоконтурною радіолокаторною системою пошуку вибухонебезпечних пристроїв, та двостороннім зв'язком з системою автономного управління рухом шасі з її першим входом, безпосередньо в двоконтурній радіолокаторній системі пошуку вибухонебезпечних пристроїв блок управління прийомо-передавальною антеною пошуку вибухонебезпечних пристроїв, блок вимірювання "сигнал/шум", блок спецобчислювача та блок аналізу помилок розпізнавання вибухонебезпечних пристроїв з'єднано між собою двостороннім зв'язком, а комплект зазначених блоків, відповідно, двостороннім зв'язком з системою ідентифікації і визначення типу вибухонебезпечних пристроїв, телевізійною системою пошуку вибухонебезпечних пристроїв, блоком інформаційних каналів зв'язку і з газоаналітичною системою пошуку вибухонебезпечних пристроїв, і також двостороннім зв'язком з системою автономного управління рухом шасі з її першим входом, безпосередньо в системі інформаційних знань блок моделей зовнішнього середовища, блок внутрішньої моделі робототехнічного комплексу, блок моделей типових вибухонебезпечних пристроїв, блок обмежень по технологічних операціях робототехнічного комплексу, блок моделей метеорологічних умов та блок даних по ТТХ робототехнічного комплексу з'єднано між собою двостороннім зв'язком, а зазначений комплект блоків, відповідно, з другим входом блока інформаційних каналів зв'язку через свій перший вихід, з другим входом системи планування, управління та синхронізації через свій другий вихід, з першим виходом системи управління виконавчими пристроями та з першим входом/виходом блока технічної самодіагностики через свій вхід/вихід, безпосередньо в системі обробки сигналів технічного зору блок обробки вертикальних зображень, блок обробки горизонтальних зображень, блок обробки сигналів тактильних сенсорів та блок обробки сигналів дальномірів з'єднано між собою двостороннім зв'язком та, відповідно, двостороннім зв'язком з системою управління виконавчими пристроями і з третім входом системи автономного управління рухом шасі, безпосередньо в газоаналітичній системі пошуку вибухонебезпечних пристроїв блок управління хімічними датчиками виявлення молекул вибухової речовини та блок обробки сигналів хімічних датчиків з'єднано між собою двостороннім зв'язком, а комплект зазначених блоків, відповідно, двостороннім зв'язком з системою ідентифікації і визначення типу вибухонебезпечних пристроїв, блоком інформаційних каналів зв'язку, телевізійною системою пошуку вибухонебезпечних пристроїв і двоконтурною радіолокаторною системою пошуку вибухонебезпечних пристроїв, і також двостороннім зв'язком з системою автономного управління рухом шасі з її першим входом, безпосередньо в системі навігації та позиціонування блок обробки сигналів GPS приймачів та блок бази картографічної інформації з'єднано між собою двостороннім зв'язком та, відповідно, двостороннім зв'язком з системою автономного управління рухом шасі і з блоком технічної самодіагностики. 13 UA 73976 U 14 UA 73976 U 15 UA 73976 U 16 UA 73976 U 17 UA 73976 U 18 UA 73976 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 19
ДивитисяДодаткова інформація
Назва патенту англійськоюControlled robotic system for survey and mine clearing
Автори англійськоюHusliakov Oleh Mykhailovych, Rudakov Volodymyr Ivanovych, Vaskivskyi Mykhailo Ivanovych, Kucherov Dmytro Pavlovych
Назва патенту російськоюУправляемый робототехнический комплекс разведки и разминирования
Автори російськоюГусляков Олег Михайлович, Рудаков Владимир Иванович, Васильковский Михаил Иванович, Кучеров Дмитрий Павлович
МПК / Мітки
МПК: B60G 23/00, B62M 27/00, F41H 11/16
Мітки: комплекс, керований, розвідки, робототехнічний, розмінування
Код посилання
<a href="https://ua.patents.su/21-73976-kerovanijj-robototekhnichnijj-kompleks-rozvidki-ta-rozminuvannya.html" target="_blank" rel="follow" title="База патентів України">Керований робототехнічний комплекс розвідки та розмінування</a>
Робототехнічний комплекс
Номер патенту: 10156
Опубліковано: 15.11.2005
Автори: Крамар Артем Володимирович, Пестунов Володимир Михайлович, Павленко Іван Іванович
МПК: B23Q 39/00
Мітки: робототехнічний, комплекс
Формула / Реферат:
1. Робототехнічний комплекс, що містить переналагоджуваний багатопозиційний агрегатний верстат із затискними пристроями і промисловий робот, який відрізняється тим, що затискні пристрої виконані у вигляді магнітних плит, а робот оснащений щонайменше двокоординатною системою управління переміщення руки та змінними модулями захоплювача заготовки.2. Комплекс за п. 1, який відрізняється тим, що система управління по кожній координаті...
Робототехнічний комплекс
Номер патенту: 46125
Опубліковано: 10.12.2009
Автори: Скоріков Олексій Михайлович, Карпенко Юрій Володимирович, Кузнєцов Юрій Миколайович, Тацюк Світлана Юріївна, Луценко Ірина Олександрівна
МПК: B23Q 39/00
Мітки: робототехнічний, комплекс
Формула / Реферат:
Робототехнічний комплекс, що містить токарний верстат з передньою і задньою бабками, супортом, які оснащені приводами подач, портал з маніпулятором, завантажувально-розвантажувальні позиції, який відрізняється тим, що супорт розташований на платформі із штангами постійної довжини з можливістю їх переміщення від приводів, а портал виконаний у вигляді каркасу клиноподібної форми, нижні кінці якого жорстко закріплені на станині верстата, а...
Робототехнічний комплекс для здійснення мікропереміщень
Номер патенту: 30449
Опубліковано: 25.02.2008
Автори: Діордіца Ірина Миколаївна, Барабаш Ярослав Васильович, Вострікова Ольга Анатоліївна, Філіппова Марина В`ячеславівна, Остафьєв Володимир Олександрович
МПК: B23Q 17/22
Мітки: здійснення, мікропереміщень, комплекс, робототехнічний
Формула / Реферат:
Робототехнічний комплекс для здійснення мікропереміщень, що містить пристрій для здійснення мікропереміщень, до складу якого входить корпус, в якому розташовані два гвинтових з'єднання з різними значеннями кроків різьби, одного й того ж направлення, який відрізняється тим, що робототехнічний комплекс для здійснення мікропереміщень споряджено п'єзоелектричним двигуном, вихід якого підключений до пристрою для здійснення мікропереміщень, а вхід...
Комплекс радіоелектронної розвідки та радіоелектронної протидії
Номер патенту: 80774
Опубліковано: 25.10.2007
Автори: Горбулін Володимир Павлович, Рябкін Юрій Вікторович, Коротков Вячеслав Валентинович, Марченко Василь Васильович, Гришко Микола Мефодійович, Яковлев Віталій Васильович, Немчин Олександр Федорович
Мітки: протидії, комплекс, радіоелектронної, розвідки
Формула / Реферат:
1. Комплекс радіоелектронної розвідки та радіоелектронної протидії, який містить станцію пункту керування комплексом, станцію багатоцільової радіорозвідки короткохвильового і ультракороткохвильового діапазонів, станції радіозавад короткохвильового та ультракороткохвильового діапазонів, засоби радіозавад яких виконані з діапазоном робочих частот до 150 МГц, станції комплексу виконані мобільними і зв'язані засобами радіозв'язку, який...
Пересувний комплекс розвідки наземних цілей “барс”
Номер патенту: 12326
Опубліковано: 15.02.2006
Автори: Москаленко Олег Віталійович, Фотченков Олександр Дмитрович, Лейда Борис Володимирович, Ніценко Дмитро Анатолійович
МПК: B60R 11/00, B60R 5/00
Мітки: пересувний, наземних, комплекс, цілей, розвідки, барс
Формула / Реферат:
1. Пересувний комплекс розвідки наземних цілей, що має в своєму складі базовий автомобіль, на борту якого розташовано радіолокаційні станції, ПЕОМ з рідкокристалічним дисплеєм, бортову акумуляторну батарею, який відрізняється тим, що радіолокаційні станції виконані функціонально пов’язаними з прожектором, приладами оптичного та електронно-оптичного спостереження, сигналізаційними приладами, приладами GPS, крім того, бортову акумуляторну...
Попередній патент: Спосіб лікування хворих на ішемію нижніх кінцівок
Наступний патент: Пасовий привід
Випадковий патент: Спосіб використання леза бритви при видалення волосяного покрову з лицевої частини людини