Робототехнічний комплекс
Номер патенту: 46125
Опубліковано: 10.12.2009
Автори: Кузнєцов Юрій Миколайович, Скоріков Олексій Михайлович, Луценко Ірина Олександрівна, Карпенко Юрій Володимирович, Тацюк Світлана Юріївна
Формула / Реферат
Робототехнічний комплекс, що містить токарний верстат з передньою і задньою бабками, супортом, які оснащені приводами подач, портал з маніпулятором, завантажувально-розвантажувальні позиції, який відрізняється тим, що супорт розташований на платформі із штангами постійної довжини з можливістю їх переміщення від приводів, а портал виконаний у вигляді каркасу клиноподібної форми, нижні кінці якого жорстко закріплені на станині верстата, а верхні - з'єднані балкою з консольними кінцями по обидві її сторони для переміщення маніпулятора до завантажувально-розвантажувальної позиції.
Текст
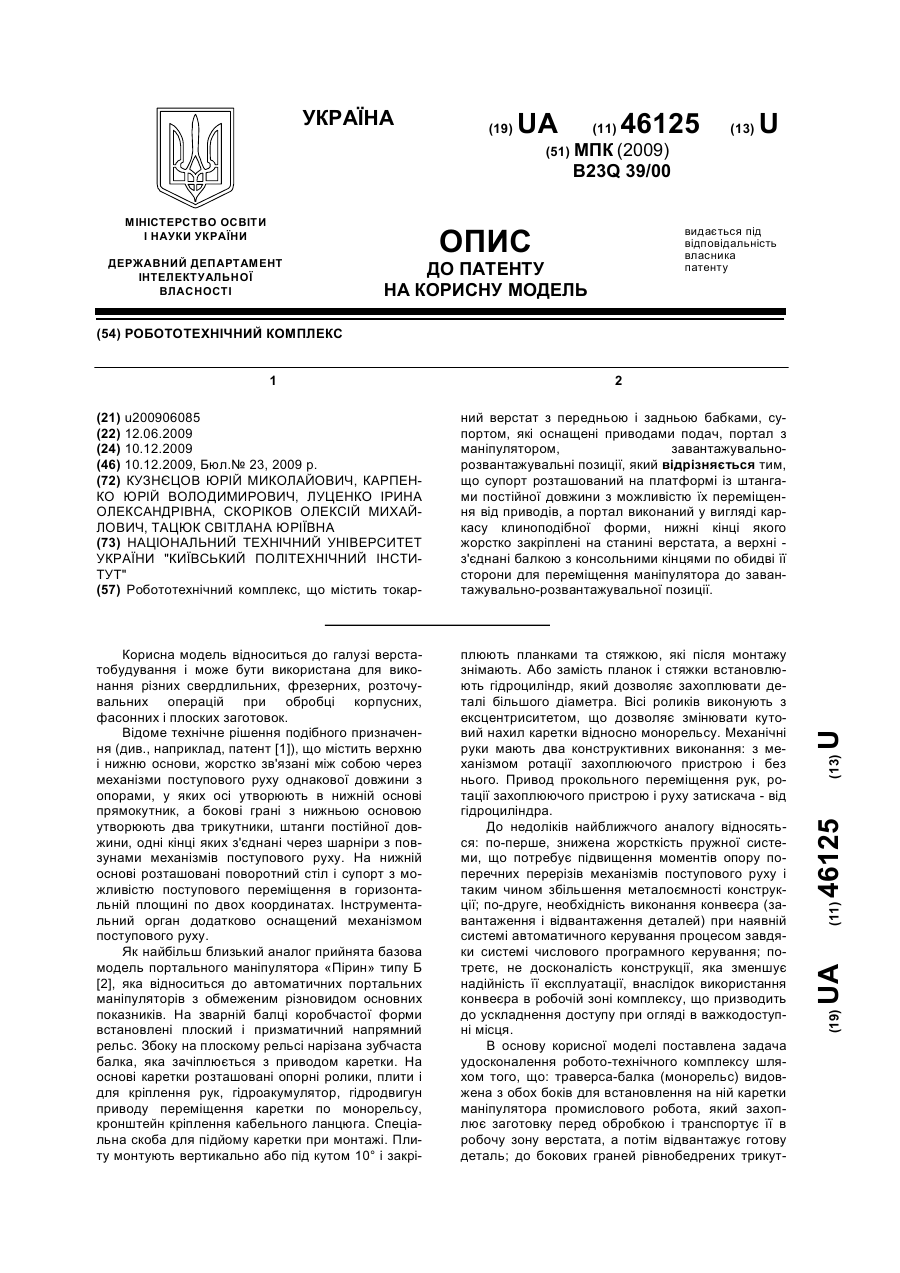
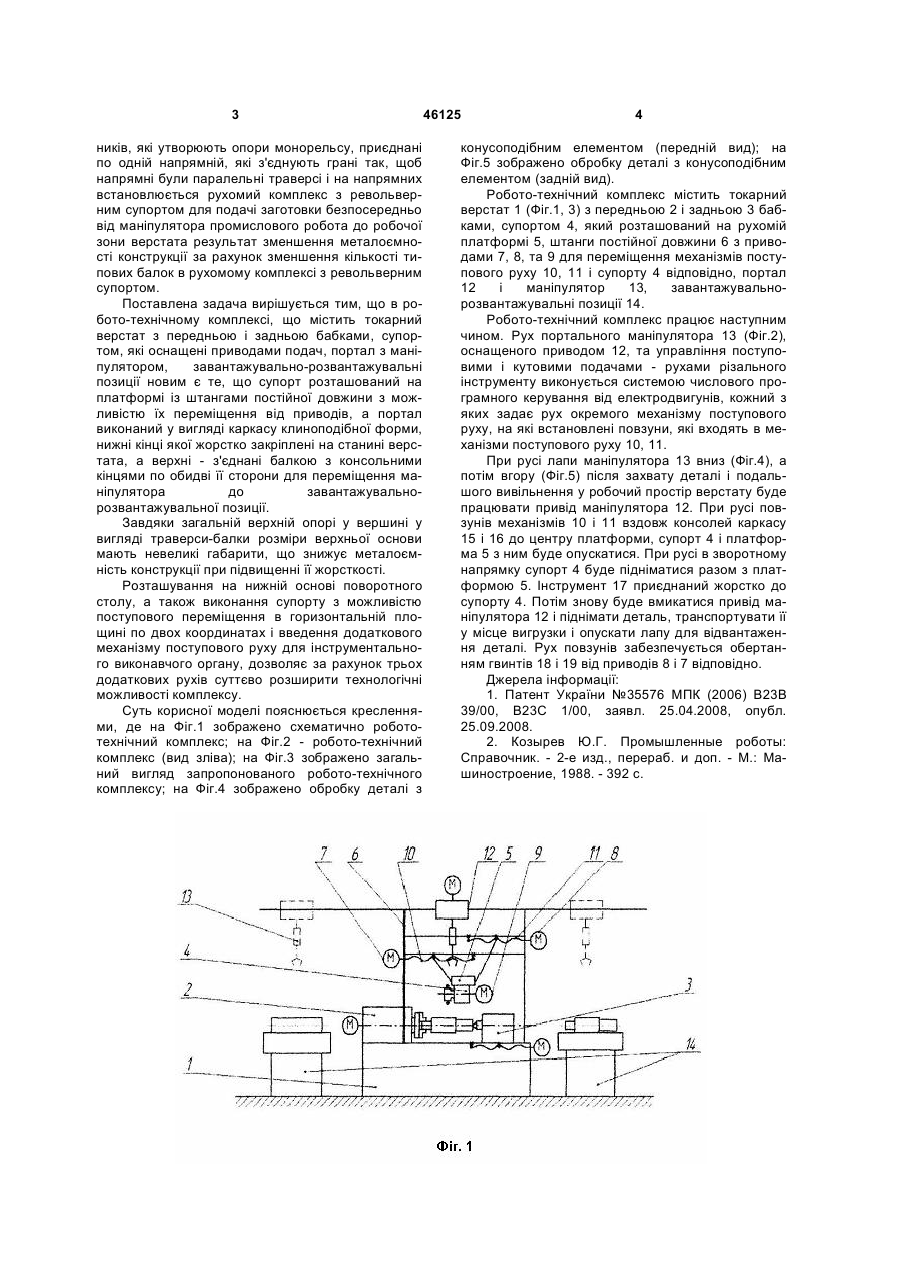
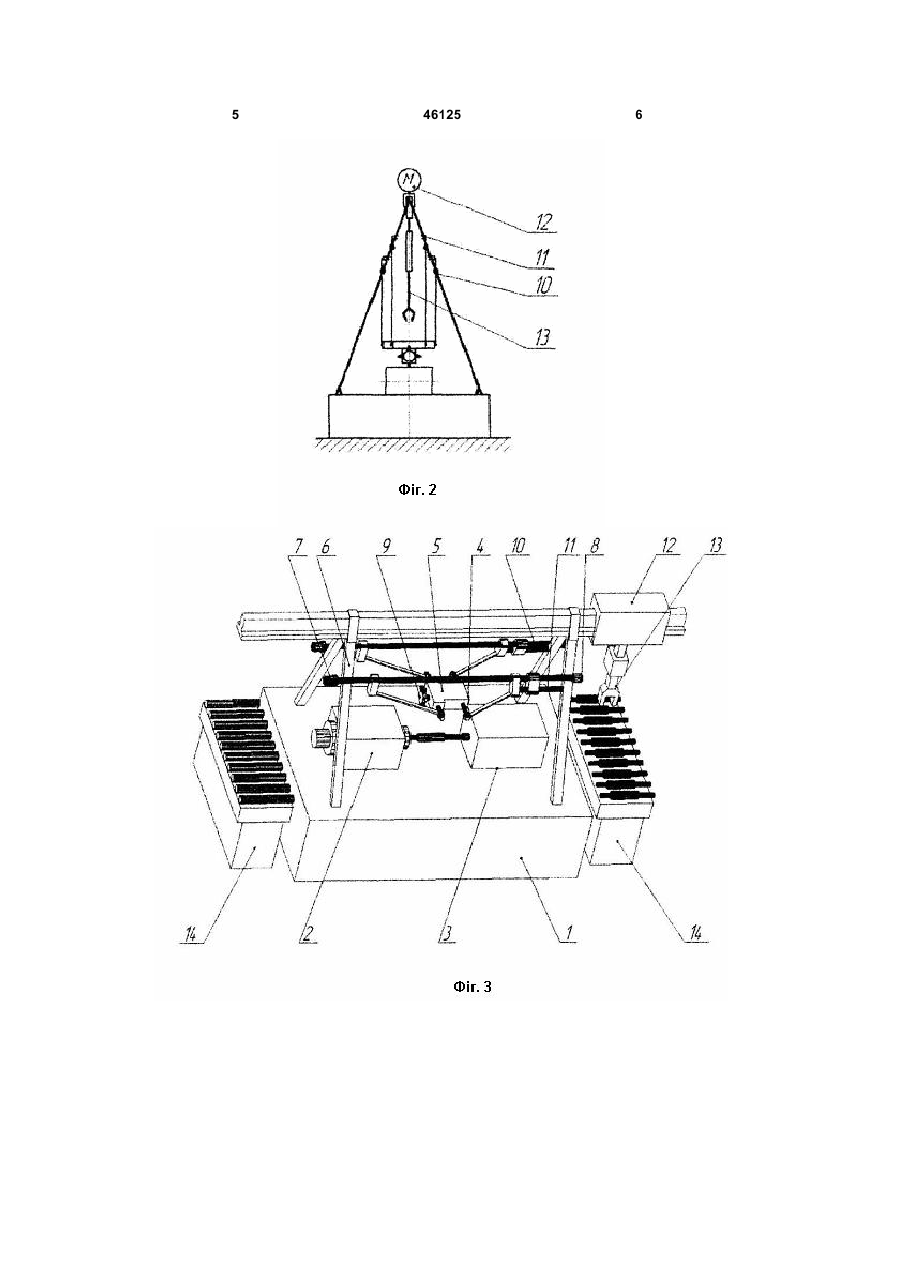
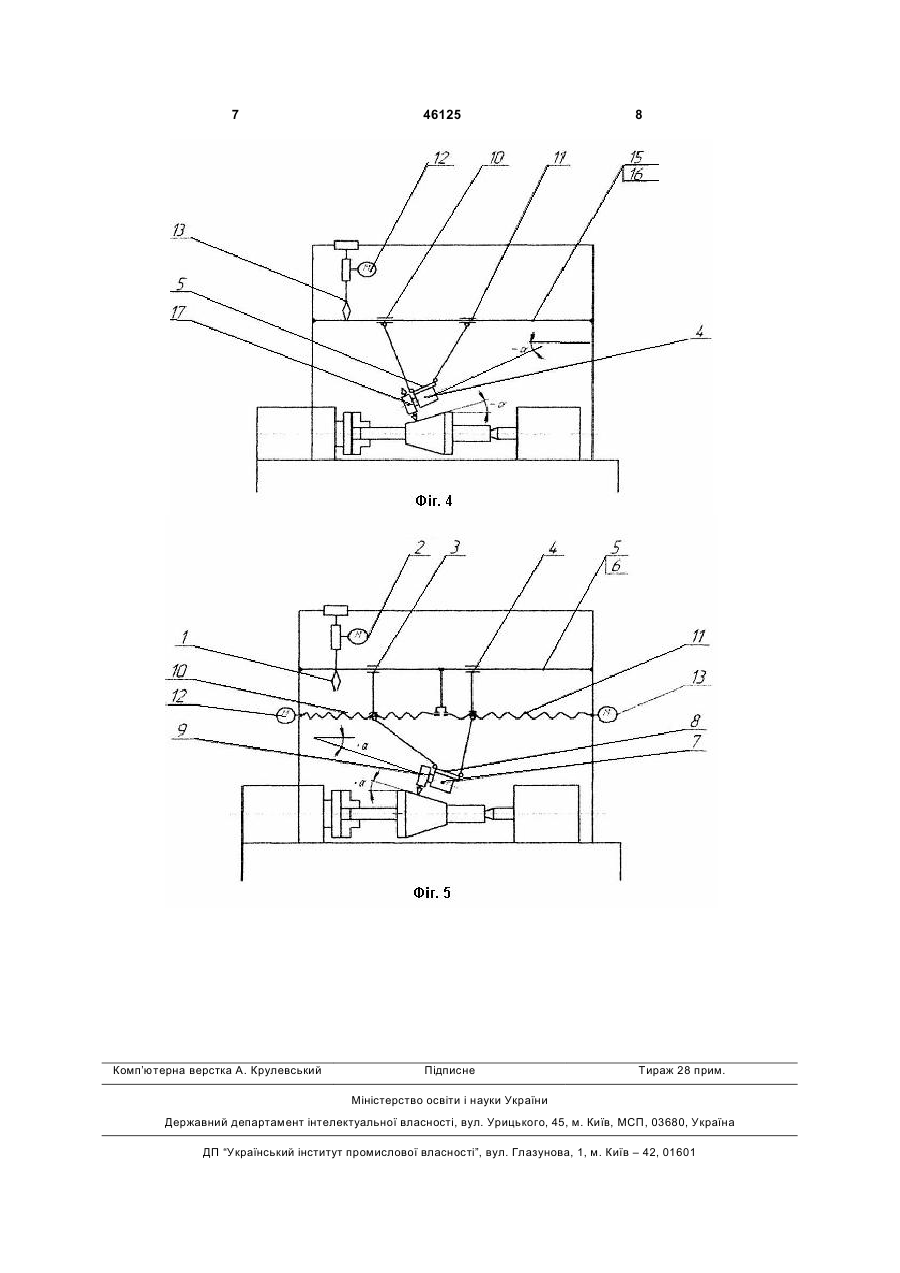
Робототехнічний комплекс, що містить токар 3 ників, які утворюють опори монорельсу, приєднані по одній напрямній, які з'єднують грані так, щоб напрямні були паралельні траверсі і на напрямних встановлюється рухомий комплекс з револьверним супортом для подачі заготовки безпосередньо від маніпулятора промислового робота до робочої зони верстата результат зменшення металоємності конструкції за рахунок зменшення кількості типових балок в рухомому комплексі з револьверним супортом. Поставлена задача вирішується тим, що в робото-технічному комплексі, що містить токарний верстат з передньою і задньою бабками, супортом, які оснащені приводами подач, портал з маніпулятором, завантажувально-розвантажувальні позиції новим є те, що супорт розташований на платформі із штангами постійної довжини з можливістю їх переміщення від приводів, а портал виконаний у вигляді каркасу клиноподібної форми, нижні кінці якої жорстко закріплені на станині верстата, а верхні - з'єднані балкою з консольними кінцями по обидві її сторони для переміщення маніпулятора до завантажувальнорозвантажувальної позиції. Завдяки загальній верхній опорі у вершині у вигляді траверси-балки розміри верхньої основи мають невеликі габарити, що знижує металоємність конструкції при підвищенні її жорсткості. Розташування на нижній основі поворотного столу, а також виконання супорту з можливістю поступового переміщення в горизонтальній площині по двох координатах і введення додаткового механізму поступового руху для інструментального виконавчого органу, дозволяє за рахунок трьох додаткових рухів суттєво розширити технологічні можливості комплексу. Суть корисної моделі пояснюється кресленнями, де на Фіг.1 зображено схематично робототехнічний комплекс; на Фіг.2 - робото-технічний комплекс (вид зліва); на Фіг.3 зображено загальний вигляд запропонованого робото-технічного комплексу; на Фіг.4 зображено обробку деталі з 46125 4 конусоподібним елементом (передній вид); на Фіг.5 зображено обробку деталі з конусоподібним елементом (задній вид). Робото-технічний комплекс містить токарний верстат 1 (Фіг.1, 3) з передньою 2 і задньою 3 бабками, супортом 4, який розташований на рухомій платформі 5, штанги постійної довжини 6 з приводами 7, 8, та 9 для переміщення механізмів поступового руху 10, 11 і супорту 4 відповідно, портал 12 і маніпулятор 13, завантажувальнорозвантажувальні позиції 14. Робото-технічний комплекс працює наступним чином. Рух портального маніпулятора 13 (Фіг.2), оснащеного приводом 12, та управління поступовими і кутовими подачами - рухами різального інструменту виконується системою числового програмного керування від електродвигунів, кожний з яких задає рух окремого механізму поступового руху, на які встановлені повзуни, які входять в механізми поступового руху 10, 11. При русі лапи маніпулятора 13 вниз (Фіг.4), а потім вгору (Фіг.5) після захвату деталі і подальшого вивільнення у робочий простір верстату буде працювати привід маніпулятора 12. При русі повзунів механізмів 10 і 11 вздовж консолей каркасу 15 і 16 до центру платформи, супорт 4 і платформа 5 з ним буде опускатися. При русі в зворотному напрямку супорт 4 буде підніматися разом з платформою 5. Інструмент 17 приєднаний жорстко до супорту 4. Потім знову буде вмикатися привід маніпулятора 12 і піднімати деталь, транспортувати її у місце вигрузки і опускати лапу для відвантаження деталі. Рух повзунів забезпечується обертанням гвинтів 18 і 19 від приводів 8 і 7 відповідно. Джерела інформації: 1. Патент України №35576 МПК (2006) В23В 39/00, В23С 1/00, заявл. 25.04.2008, опубл. 25.09.2008. 2. Козырев Ю.Г. Промышленные роботы: Справочник. - 2-е изд., перераб. и доп. - М.: Машиностроение, 1988. - 392 с. 5 46125 6 7 Комп’ютерна верстка А. Крулевський 46125 8 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRobot complex
Автори англійськоюKuznietsov Yurii Mykolaiovych, Karpenko Yurii Volodymyrovych, Lutsenko Iryna Oleksandrivna, Skorikov Oleksii Mykhailovych, Tatsiuk Svitlana Yuriivna
Назва патенту російськоюРобототехнический комплекс
Автори російськоюКузнецов Юрий Николаевич, Карпенко Юрий Владимирович, Луценко Ирина Александровна, Скориков Алексей Михайлович, Тацюк Светлана Юрьевна
МПК / Мітки
МПК: B23Q 39/00
Мітки: робототехнічний, комплекс
Код посилання
<a href="https://ua.patents.su/4-46125-robototekhnichnijj-kompleks.html" target="_blank" rel="follow" title="База патентів України">Робототехнічний комплекс</a>
Автоматизований робототехнічний комплекс дистанційного керування для закриття (відкриття) кришок первинних контейнерів з радіоактивними відходами
Номер патенту: 7711
Опубліковано: 15.07.2005
Автори: Бланар Олег Володимирович, Зубко Микола Олексійович, Кондратенко Віктор Васильович, Рафалович Михайло Григорович
МПК: G21F 5/005
Мітки: контейнерів, первинних, робототехнічний, відходами, керування, відкриття, комплекс, автоматизований, кришок, радіоактивними, закриття, дистанційного
Формула / Реферат:
1. Автоматичний робототехнічний комплекс дистанційного керування для закриття (відкриття) кришок первинних контейнерів з радіоактивними відходами, що містить транспортну магістраль, транспортний візок, піддон з первинними контейнерами, кроковий підйомник, касету з кришками, маніпулятор, що містить, в тому числі, гайки в корпусах, механізм переміщення маніпулятора, який відрізняється тим, що гайки, які подають рухому частину маніпулятора з...
Робототехнічний комплекс для здійснення мікропереміщень
Номер патенту: 30449
Опубліковано: 25.02.2008
Автори: Діордіца Ірина Миколаївна, Остафьєв Володимир Олександрович, Барабаш Ярослав Васильович, Вострікова Ольга Анатоліївна, Філіппова Марина В`ячеславівна
МПК: B23Q 17/22
Мітки: робототехнічний, мікропереміщень, комплекс, здійснення
Формула / Реферат:
Робототехнічний комплекс для здійснення мікропереміщень, що містить пристрій для здійснення мікропереміщень, до складу якого входить корпус, в якому розташовані два гвинтових з'єднання з різними значеннями кроків різьби, одного й того ж направлення, який відрізняється тим, що робототехнічний комплекс для здійснення мікропереміщень споряджено п'єзоелектричним двигуном, вихід якого підключений до пристрою для здійснення мікропереміщень, а вхід...
Робототехнічний комплекс
Номер патенту: 10156
Опубліковано: 15.11.2005
Автори: Пестунов Володимир Михайлович, Павленко Іван Іванович, Крамар Артем Володимирович
МПК: B23Q 39/00
Мітки: робототехнічний, комплекс
Формула / Реферат:
1. Робототехнічний комплекс, що містить переналагоджуваний багатопозиційний агрегатний верстат із затискними пристроями і промисловий робот, який відрізняється тим, що затискні пристрої виконані у вигляді магнітних плит, а робот оснащений щонайменше двокоординатною системою управління переміщення руки та змінними модулями захоплювача заготовки.2. Комплекс за п. 1, який відрізняється тим, що система управління по кожній координаті...
Робото-технологічний комплекс
Номер патенту: 12497
Опубліковано: 15.02.2006
Автори: Коваленко Сергій Вікторович, Артюхов Анатолій Миколайович, Пестунов Володимир Михайлович
МПК: B65G 63/00
Мітки: робото-технологічний, комплекс
Формула / Реферат:
1. Робото-технологічний комплекс, що містить багатоопераційні верстати, датчики, роботи зв'язані системою керування і проміжними столами, який відрізняється тим, що додатково оснащений транспортною системою, на вході якої встановлена цифрова фотокамера, що через комп'ютер зв'язана з розподілювачем потоку заготовок та багатоопераційними верстатами з числовим програмним керуванням.2. Робото-технологічний комплекс за п. 1, який...
Автоматизований складальний комплекс

Номер патенту: 61472
Опубліковано: 17.11.2003
Автори: Горященко Сергій Леонідович, Панчук Володимир Васильович, Драпак Георгій Мефодійович
МПК: A43D 111/00
Мітки: складальний, комплекс, автоматизований
Формула / Реферат:
Автоматизований складальний комплекс, що містить закріплений на станині механізм для подачі деталей на позицію складання, який встановлений на штоці силового циліндра і оснащений кареткою, що несе засоби для поштучного відокремлення і маніпулювання деталями, пристрій для завантаження деталей з блоком касет, встановлених за допомогою напрямних, та пов'язаний з ним механізм для підтримання постійного рівня верхньої деталі, а також пристосування...
Попередній патент: Пристрій для випробування матеріалів на тертя і спрацьовування при змінних температурних режимах мащення
Наступний патент: Спосіб безперервного вимірювання спрацювання в умовах мащення
Випадковий патент: Секційний радіатор водяного опалення та опора для його установки