Спосіб і пристрій для автоматичного неруйнуючого контролю трубчастих колісних осей з профілями з змінними внутрішнім і зовнішнім радіусами
Номер патенту: 98964
Опубліковано: 10.07.2012
Автори: Ногейра де Паула Ренато, Лезаж Фредерік, Ноель Александр
Формула / Реферат
1. Спосіб контролю колісних осей за допомогою ультразвукового(их) зонда(ів), який відрізняється тим, що цей спосіб включає наступні етапи, на яких:
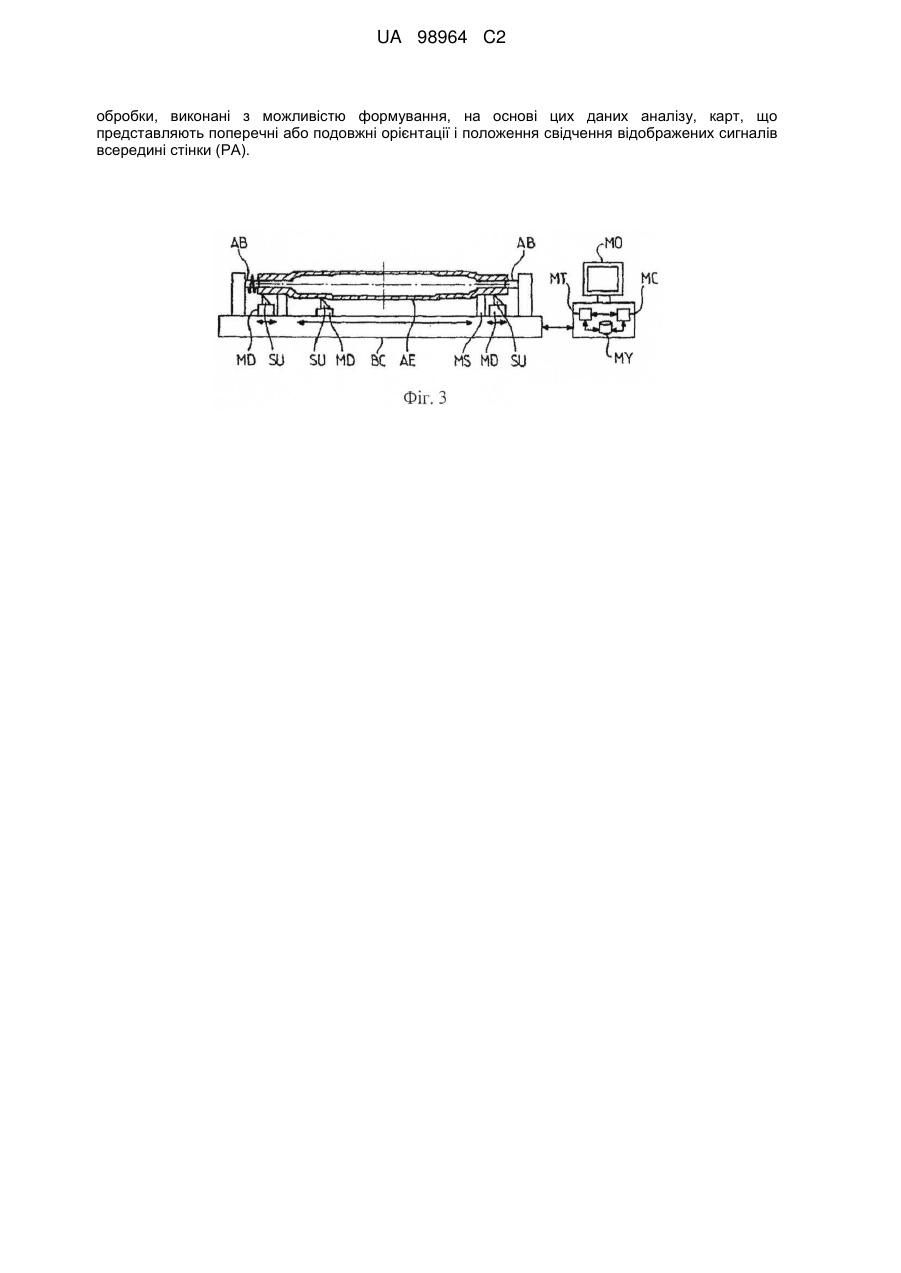
a) розміщують на контрольному стенді (ВС) трубчасту колісну вісь (АЕ), що містить стінку (РА), яка має профілі із змінними і відомими зовнішнім і внутрішнім радіусами;
b) розміщують щонайменше один ультразвуковий зонд (SU) на зовнішній (SE) або на внутрішній (SI) поверхні згаданої стінки (РА) в першому місці, яке вибирається в залежності від її профілів і можливого загромадження осі (АЕ), потім аналізують з використанням кожного зонда (SU) першу вибрану ділянку згаданої стінки (РА) в першому вибраному кутовому секторі, орієнтованому вздовж першого подовжнього або поперечного напряму, таким чином, щоб одержати дані аналізу для різних відносних кутових положень осі (АЕ) відносно зонда (SU);
c) знов розміщують щонайменше один зонд (SU) в щонайменше одному другому місці, яке вибирається в залежності від профілів стінки (РА) і можливого загромадження осі (АЕ), аналізують з використанням кожного зонда (SU) другу вибрану ділянку згаданої стінки (РА) у другому вибраному кутовому секторі, орієнтованому вздовж другого напряму, протилежного згаданому першому напряму, таким чином, щоб одержати інші дані аналізу для різних відносних кутових положень згаданої осі (АЕ) відносно зонда (SU;
d) формують, на основі згаданих одержаних даних аналізу, карти, характерні для поперечних або подовжніх орієнтацій і положень показань відбитих сигналів всередині згаданої стінки (РА).
2. Спосіб за п. 1, який відрізняється тим, що здійснюють перший раз етапи з b) пo d), розміщуючи кожний ультразвуковий зонд (SU) на зовнішній поверхні (SE) стінки (РА) для того, щоб сформувати карти, характерні для положень і орієнтацій показань відображених сигналів всередині згаданої стінки (РА), після чого здійснюють другий раз щонайменше етапи b) і d), розміщуючи щонайменше один ультразвуковий зонд (SU) на внутрішній поверхні (SI) стінки (РА) в щонайменше одному третьому місці, яке вибирається в залежності від її профілів, а потім аналізують, з використанням кожного зонда (SU), третю вибрану ділянку стінки (РА) в третьому вибраному кутовому секторі, орієнтованому вздовж щонайменше одного вибраного подовжнього або поперечного напряму, таким чином, щоб одержати дані аналізу для різних відносних кутових положень осі (АЕ) відносно зонда (SU) і сформувати карти, характерні для положень і орієнтацій показань відбитих сигналів всередині стінки (РА).
3. Спосіб за одним з пунктів 1 і 2, який відрізняється тим, що здійснюють етапи з b) пo d) щонайменше один раз, розміщуючи кожний ультразвуковий зонд (SU) на зовнішній (SE) або внутрішній (SI) поверхні стінки (РА) таким чином, щоб виконати ультразвуковий аналіз в кутовому секторі, орієнтованому вздовж подовжнього напряму, і сформувати таким чином карти, характерні для поперечних орієнтацій і положень показань відображених сигналів всередині стінки (РА), після чого знову здійснюють етапи з b) пo d) ще щонайменше один раз, розміщуючи щонайменше один ультразвуковий зонд (SU) на зовнішній (SE) або на внутрішній (SI) поверхні стінки (РА) таким чином, щоб виконати ультразвуковий аналіз в кутовому секторі, орієнтованому вздовж поперечного напряму, і сформувати таким чином карти, характерні для подовжніх орієнтацій і положень показань відбитих сигналів всередині стінки (РА).
4. Спосіб за одним з пунктів з 1 по 3, який відрізняється тим, що після здійснення етапу d) передбачають етап e), на якому здійснюють аналіз щонайменше зовнішньої поверхні (SE) стінки (РА) за допомогою іншої технології аналізу, відмінної від технології, основаної на ультразвуку, таким чином, щоб одержати дані аналізу для різних відносних кутових положень осі (АЕ) відносно зонда (SU).
5. Спосіб за п. 4, який відрізняється тим, що після здійснення етапу e) здійснюють етап f), на якому на основі цих одержаних даних аналізу формують карти, характерні для положень і орієнтацій показань поверхні стінки (РА).
6. Спосіб за одним з пунктів 4 і 5, який відрізняється тим, що згадану іншу технологію аналізу вибирають в групі, що містить так звану технологію потоку витоку і так звану технологію з використанням струмів Фуко.
7. Спосіб за одним з пунктів з 1 по 6, який відрізняється тим, що аналізують кожну з перших, других і можливих третіх ділянок згаданої стінки за допомогою подовжнього відносного переміщення щонайменше одного зонда (SU) відносно осі (АЕ) і/або за допомогою електронного сканування з використанням щонайменше одного зонда (SU).
8. Спосіб за одним з пунктів з 1 по 7, який відрізняється тим, що на одному щонайменше із згаданих етапів b), с) і e) одержують різні відносні кутові положення осі (АЕ) відносно зонда (SU), приводячи у обертання згадану вісь (АЕ) відносно зонда (SU).
9. Спосіб за одним з пунктів з 1 по 8, який відрізняється тим, що на одному щонайменше із згаданих етапів b), с) і e) одержують різні відносні кутові положення осі (АЕ) відносно зонда (SU), приводячи у обертання щонайменше один зонд (SU) відносно осі (АЕ).
10. Спосіб за одним з пунктів з 1 по 9, який відрізняється тим, що він включає етап g), на якому порівнюють дані з карт, одержаних в процесі етапу d), з даними з перших еталонних карт, одержаних на першій еталонній осі того ж типу, що і контрольована вісь, але позбавленій дефектів, таким чином, щоб запам'ятовувати тільки ті дані, які характерні для показань відбитих сигналів, не присутніх в згаданих перших еталонних картах, і сформувати, таким чином, "скореговані" карти.
11. Спосіб за одним з пунктів з 1 по 10, який відрізняється тим, що він включає етап h), на якому порівнюють дані з карт, одержаних в процесі етапу d) або g), з даними з других еталонних карт, одержаних на другій еталонній осі того ж типу, що і контрольована вісь, але яка містить відомі дефекти, таким чином, щоб запам'ятати тільки ті дані, які характерні для показань відбитих сигналів, характерних для згаданих відомих дефектів, присутніх в згаданих других еталонних картах, і сформувати, таким чином, карти дефектів.
12. Спосіб за одним з пунктів з 1 по 11, який відрізняється тим, що він включає етап і), на якому порівнюють амплітуди даних з карт, одержаних в процесі етапу d) або g), з вибраною пороговою амплітудою для того, щоб запам'ятати тільки ті дані, які характерні для показань відбитих сигналів, амплітуди яких перевищують згадану порогову амплітуду і сигналізують про наявність дефектів, і сформувати, таким чином, карти дефектів.
13. Спосіб за п. 12, який відрізняється тим, що у випадку виявлення амплітуди, що перевищує згадану порогову амплітуду, генерують попереджувальний сигнал.
14. Спосіб за одним з пунктів з 1 по 13, який відрізняється тим, що він включає етап j), на якому відображають щонайменше одну карту на екрані (EC).
15. Спосіб за одним з пунктів з 1 по 14, який відрізняється тим, що використовують зонди (SU), здатні випромінювати ультразвук вздовж одного єдиного напряму із змінним кутом.
16. Спосіб за п. 15, який відрізняється тим, що згаданий кут змінюється між приблизно 0° і приблизно 70° відносно подовжнього або поперечного напряму.
17. Спосіб за одним з пунктів з 1 по 14, який відрізняється тим, що використовують зонди (SU) з так званою фазованою решіткою, здатні випромінювати ультразвук вздовж напрямів, що знаходяться у вибраному кутовому секторі.
18. Спосіб за п. 15, який відрізняється тим, що згаданий кутовий сектор знаходиться між приблизно 0° і приблизно 70° відносно подовжнього або поперечного напряму.
19. Пристрій контролю колісних осей, який відрізняється тим, що він має в своєму складі: і) контрольний стенд (ВС), виконаний з можливістю прийому трубчастої осі (АЕ), що містить стінку (РА), яка має профілі із змінними і відомими зовнішнім і внутрішнім радіусами, іі) щонайменше один ультразвуковий зонд (SU), виконаний з можливістю аналізу щонайменше однієї вибраної ділянки згаданої стінки (РА) у вибраному кутовому секторі і одержання, таким чином, даних аналізу, ііі) засоби контролю (МС), виконані з можливістю керування контрольним стендом (ВС) таким чином, щоб розміщувати кожний зонд (SU) на зовнішній (SE) або на внутрішній (SI) поверхні стінки (РА) в першому місці, яке вибирається в залежності від профілів цієї стінки і можливого загромадження згаданої осі, таким чином, щоб він аналізував щонайменше одну першу і щонайменше одну другу вибрані ділянки згаданої стінки (РА) відповідно в щонайменше одному першому і в щонайменше одному другому вибраних кутових секторах, орієнтованих вздовж першого і другого подовжніх або поперечних протилежних напрямів, і щоб він одержував, таким чином, дані аналізу для різних відносних кутових положень осі (АЕ) відносно зонда (SU), iv) засоби (МТ) обробки, виконані з можливістю формування, на основі згаданих одержаних даних аналізу, карт, що є репрезентативними для поперечних або подовжніх орієнтацій і положень показань відбитих сигналів всередині стінки (РА).
20. Пристрій за п. 19, який відрізняється тим, що згадані засоби (МС) контролю виконані з можливістю контролю, перший раз, відносного переміщення щонайменше одного зонда (SU) відносно зовнішньої поверхні (SE) стінки (РА) таким чином, щоб він одержував дані аналізу для різних відносних кутових положень згаданої осі (АЕ) відносно нього (SU), з подальшим контролем, другий раз, відносного переміщення щонайменше одного зонда (SU) відносно внутрішньої поверхні (SI) стінки (РА) таким чином, щоб він аналізував щонайменше одну третю вибрану ділянку стінки (РА) в щонайменше одному третьому вибраному кутовому секторі, орієнтованому вздовж вибраного подовжнього або поперечного напряму, і щоб одержував, таким чином, інші дані аналізу для різних відносних кутових положень згаданої осі (АЕ) відносно нього (SU), а також тим, що згадані засоби (МТ) обробки виконані з можливістю формування, на основі одержаних даних аналізу, карт, характерних для положень і орієнтацій показань відбитих сигналів всередині стінки (РА).
21. Пристрій за одним з пунктів 19 і 20, який відрізняється тим, що згадані засоби (МС) контролю виконані з можливістю: і) контролю, щонайменше перший раз, відносного переміщення щонайменше одного зонда (SU) відносно зовнішньої (SE) або внутрішньої (SI) поверхні стінки (РА) таким чином, щоб він здійснював ультразвуковий аналіз в кутовому секторі, орієнтованому вздовж подовжнього напряму, і щоб він одержував дані аналізу, на основі яких засоби (МТ) обробки сформують карти, характерні для поперечних орієнтацій і положень показань відображених сигналів, потім іі) контролю, щонайменше другий раз, відносного переміщення щонайменше одного зонда (SU) відносно зовнішньої (SE) або внутрішньої (SI) поверхні стінки (РА) таким чином, щоб він здійснював ультразвуковий аналіз в кутовому секторі, орієнтованому вздовж поперечного напряму, і щоб він одержував дані аналізу, на основі яких засоби (МТ) обробки сформують карти, характерні для подовжніх орієнтацій і положень показань відбитих сигналів.
22. Пристрій за одним з пунктів з 19 по 21, який відрізняється тим, що він має в своєму складі засоби аналізу поверхні, виконані з можливістю аналізу щонайменше зовнішньої поверхні (SE) стінки (РА) за допомогою іншої технології аналізу, відмінної від технології, основаної на ультразвуку, таким чином, щоб одержати дані аналізу для різних відносних положень осі (АЕ) відносно зонда (SU).
23. Пристрій за п. 22, який відрізняється тим, що згадані засоби (МТ) обробки виконані з можливістю формування, на основі цих даних аналізу, одержаних за допомогою згаданих засобів аналізу поверхні (MAS) карт, характерних для положень і орієнтацій показань поверхні стінки (РА).
24. Пристрій за одним з пунктів 22 і 23, який відрізняється тим, що згадані засоби аналізу поверхні вибираються в групі, що містить засоби аналізу потоку витоку і засоби аналізу за допомогою струмів Фуко.
25. Пристрій за одним з пунктів з 19 по 24, який відрізняється тим, що він має в своєму складі засоби (MD) переміщення, виконані з можливістю забезпечення відносного переміщення в подовжньому напрямі щонайменше одного зонда (SU) відносно осі (АЕ), і тим, що згадані засоби (МС) контролю виконані з можливістю контролю згаданих засобів (MD) переміщення так, щоб вони переміщували подовжньо і відносно щонайменше один зонд (SU) відносно осі (АЕ) для того, щоб він аналізував частину щонайменше згаданих перших, других і можливих третіх ділянок стінки (РА).
26. Пристрій за одним з пунктів з 19 по 25, який відрізняється тим, що згадані засоби (МС) контролю виконані з можливістю здійснення електронного сканування з використанням щонайменше одного зонда (SU) для того, щоб він аналізував частину щонайменше згаданих перших, других і можливих третіх ділянок стінки (РА).
27. Пристрій за одним з пунктів з 19 по 26, який відрізняється тим, що згаданий стенд (ВС) виконаний з можливістю приведення у обертання осі (АЕ) відносно кожного зонда (SU) таким чином, щоб визначити різні відносні кутові положення цієї осі (АЕ) відносно кожного зонда (SU).
28. Пристрій за одним з пунктів з 19 по 27, який відрізняється тим, що згаданий стенд (ВС) виконаний з можливістю приведення у обертання щонайменше одного зонда (SU) відносно осі (АЕ) таким чином, щоб визначити різні відносні кутові положення згаданої осі (АЕ) відносно зонда (SU).
29. Пристрій за одним з пунктів з 19 по 28, який відрізняється тим, що згадані засоби (МТ) обробки виконані з можливістю порівняння даних з карт, одержаних на підлягаючій контролю осі (АЕ), з даними з перших еталонних карт, одержаних на першій еталонній осі того ж типу, що і контрольована вісь, але позбавленій дефектів, і запам'ятовування тільки тих даних, які є характерними для показань відбитих сигналів, які не присутні в перших еталонних картах, і формування, таким чином, скорегованих карт.
30. Пристрій за одним з пунктів з 19 по 29, який відрізняється тим, що згадані засоби (МТ) обробки виконані з можливістю порівняння даних з карт, одержаних на підлягаючій контролю осі (АЕ), з даними з других еталонних карт, одержаних на другій еталонній осі того ж типу, що і контрольована вісь, але яка містить відомі дефекти, і запам'ятовування тільки даних, характерних для показань відбитих сигналів, характерних для відомих дефектів, присутніх в згаданих других еталонних картах, і формування, таким чином, карт дефектів.
31. Пристрій за одним з пунктів з 19 по 30, який відрізняється тим, що згадані засоби (МТ) обробки виконані з можливістю порівняння амплітуд даних з карт, одержаних на підлягаючій контролю осі (АЕ), з вибраною пороговою амплітудою, і запам'ятовування тільки даних, характерних для показань відбитих сигналів, амплітуди яких перевищують цю порогову амплітуду і сигналізують про наявність дефектів, і формування, таким чином, карт дефектів.
32. Пристрій за п. 31, який відрізняється тим, що згадані засоби (МТ) обробки виконані з можливістю генерування попереджувального сигналу у випадку виявлення амплітуди, що перевищує згадану порогову амплітуду.
33. Пристрій за одним з пунктів з 19 по 32, який відрізняється тим, що він має в своєму складі екран (EC), здатний відображати щонайменше деякі з карт, сформованих засобами (МТ) обробки.
34. Пристрій за одним з пунктів з 19 по 33, який відрізняється тим, що згадані зонди (SU) здатні випромінювати ультразвук вздовж одного єдиного напряму із змінним кутом.
35. Пристрій за п. 34, який відрізняється тим, що згаданий кут змінюється між 0° і приблизно 70°, відносно подовжнього або поперечного напряму.
36. Пристрій за одним з пунктів з 19 по 33, який відрізняється тим, що згадані зонди (SU) являють собою так звані зонди з фазованою решіткою і здатні випромінювати ультразвук вздовж напрямів, що знаходяться у вибраному кутовому секторі.
37. Пристрій за п. 36, який відрізняється тим, що згаданий кутовий сектор знаходиться між приблизно 0° і приблизно 70° відносно подовжнього або поперечного напряму.
Текст
Реферат: Пристрій контролю колісних осей, що має в своєму складі: і) контрольний стенд (ВС), виконаний з можливістю прийому трубчастої колісної осі (АЕ), що містить стінку (РА), що має профілі із змінними і відомими зовнішнім і внутрішнім радіусами, іі) щонайменше один ультразвуковий зонд (SU), виконаний з можливістю аналізу щонайменше однієї вибраної ділянки цієї стінки (РА) у вибраному кутовому секторі і одержання, таким чином, даних аналізу, ііі) засоби (МС) контролю, виконані з можливістю керування контрольним стендом (ВС) таким чином, щоб розміщувати кожний зонд (SU) на зовнішній поверхні (SE) або на внутрішній (SI) поверхні стінки (РА) в щонайменше одному першому місці, яке вибирається в залежності від її профілів, і можливого загромадження цієї осі (АЕ), таким чином, щоб він аналізував перші і другі вибрані ділянки стінки (РА) відповідно в щонайменше одному першому вибраному кутовому секторі і в щонайменше одному другому вибраному кутовому секторі, орієнтованому вздовж першого і другого подовжніх або поперечних протилежних напрямів, і щоб він одержував, таким чином, дані аналізу для різних відносних кутових положень осі (АЕ) відносно нього, iv) засоби (МТ) UA 98964 C2 (12) UA 98964 C2 обробки, виконані з можливістю формування, на основі цих даних аналізу, карт, що представляють поперечні або подовжні орієнтації і положення свідчення відображених сигналів всередині стінки (РА). UA 98964 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід, що пропонується, стосується колісних осей, які використовуються, наприклад, в галузі залізничного транспорту, і, кажучи більш конкретно, цей винахід стосується контролю (або інспектуванню) таких осей за допомогою технології(й) неруйнуючого контролю. Як це відоме фахівцеві в даній галузі техніки, деякі колісні осі, зокрема, колісні осі, які повинні витримувати значні навантаження, повинні бути об'єктом виконання неруйнуючого контролю на різних стадіях їх виготовлення і технічного обслуговування для того, щоб вони могли відповідати міжнародним стандартам. Відомі способи неруйнуючого контролю в цей час досить добре адаптовані для контролю суцільних (або масивних) колісних осей. Вони засновуються звичайно на акустичному аналізі, за допомогою ультразвукових зондів, а також, у випадку необхідності, на додатковому аналізі, такому, наприклад, як аналіз поверхні або радіографічний аналіз. Серед стандартів, яким повинні відповідати суцільні колісні осі, можна згадати, зокрема, такі нормативні документи, як NF EN 13261-2004 для Європи і ISO 5948-1994 і ISO 6933-1986 для всього світу, а також М 101/90-А для Сполучених Штатів Америки (Association of American Railroads (AAR)), NBR 7947-1989 для Бразілії і JIS E 4502-1-2002 для Японії. На основі одержаних даних аналізу можна оцінити положення нестач і дефектів, поперечних або подовжніх, всередині суцільного матеріалу, який утворює вісь, і визначити, таким чином, відповідає або не відповідає ця вісь міжнародному стандарту (на виготовлення або на періодичне технічне обслуговування). Нещодавно було запропоновано замінювати деякі суцільні (або масивні) колісні осі на трубчасті колісні осі, стінка яких має профілі із змінними зовнішнім і внутрішнім радіусами. Ці нові трубчасті осі виявляються особливо переважними, оскільки вони дозволяють забезпечити істотне зниження ваги, що звичайно становить приблизно 30 % і, відповідно, збільшення навантаження, що транспортується, що супроводжується зниженням витрати енергії і, відповідно, зменшенням забруднення навколишнього середовища. Однак, контроль трубчастої осі цього типу пов'язаний з певною кількістю проблем. Дійсно, по міркуваннях існування профілю із змінним внутрішнім радіусом, виявляється скрутним диференціювати відображені сигнали, що з'являються внаслідок наявності кутових зон (або кутів), виникаючих внаслідок наявності структурних нестач або дефектів. У той же час, значна кількість цих нестач і/або дефектів представляє розміри, менші, ніж розміри нестач і/або дефектів, що зустрічаються в суцільній осі, що робить їх виявлення ще більш скрутним, беручи до уваги відносно невеликі відстані, прохідні ультразвуком. І нарешті, позиціонування на певних ділянках трубчастої осі деяких видів обладнання, такого, зокрема, як колеса (насаджені на цю вісь з натягом) і гальмові диски, з метою формування колісної осі, також здатне спричинити появу додаткових структурних нестач і/або дефектів, і навіть збільшити розміри деяких структурних дефектів і/або недоліків, виникаючих в процесі виконання попередніх операцій гарячого кування і механічної обробки. З цього слідує, що в ще більшій мірі необхідно контролювати ці ділянки і примикаючі до них зони, як в процесі первинного збирання, так і в процесі виконання операцій технічного обслуговування (зі зняттям або без зняття обладнання колісної осі). Однак, здійснення такого аналізу з використанням існуючих способів контролю виявляється скрутним, і навіть неможливим, на деяких ділянках осі в тому випадку, коли ця колісна вісь захаращена обладнанням. Таким чином, технічна задача даного винаходу полягає в тому, щоб запропонувати спосіб і пристрій неруйнуючого контролю, що дозволяє контролювати щонайменше напівавтоматичним чином і з досить високою точністю, велику частину і, якщо це можливе, всю трубчасту колісну вісь (або, в більш загальному значенні, порожнистого (трубчастого) виробу в формі тіла обертання), в тому числі в тих випадках, коли остання забезпечена обладнанням. Для рішення цієї технічної задачі в даному винаході пропонується спосіб контролю трубчастих колісних осей, що включає наступні етапи, на яких: а) розміщують на контрольному стенді трубчасту колісну вісь, що містить стінку, яка має профілі із змінними і відомими зовнішнім і внутрішнім радіусами; b) розміщують щонайменше один ультразвуковий зонд на зовнішній або внутрішній поверхні цієї стінки в першому місці, яке вибирається в залежності від її профілів і можливого загромадження осі, потім аналізують з використанням кожного зонда першої вибраної ділянки стінки в першому вибраному кутовому секторі, орієнтованому вздовж першого подовжнього або поперечного напряму, з метою одержання даних аналізу для різних відносних кутових положень осі по відношенню до зонда; c) знов розміщують щонайменше один зонд у друге місце, яке також вибирається в залежності від профілів і можливого загромадження осі, потім аналізують з використанням кожного знову розміщеним таким чином зонда другу вибрану ділянку стінки у другому 1 UA 98964 C2 5 10 15 20 25 30 35 40 45 50 55 60 вибраному кутовому секторі, орієнтованому вздовж другого напряму, протилежного першому напряму, з метою одержання інших даних аналізу для різних відносних кутових положень осі по відношенню до зонда; d) формують на основі одержаних даних аналізу карти, характерні для поперечних або подовжніх орієнтацій і положень показань відображених сигналів всередині стінки. Тут під виразом "свідчення відображеного сигналу" потрібно розуміти інформацію, одержану в стінці внаслідок відображення на поверхні розділу (між матеріалом і повітрям), або на недоліку, або ж на дефекті (структурному). У той же час, тут під виразом " недолік" потрібно розуміти ту частину стінки, яка викликає відображений сигнал, амплітуда якого менша, ніж вибраний поріг, і яка, таким чином, не носить характеру, що вимагає відбраковування даної осі. І нарешті, тут під виразом "дефект" потрібно розуміти ту частину стінки, яка викликає відображений сигнал, амплітуда якого перевищує згаданий вибраний поріг, і яка, таким чином, має характер, що вимагає відбраковування даної осі. Спосіб відповідно до винаходу, що пропонується, може містити численні варіанти реалізації, щонайменше деякі характеристики яких можуть бути взяті в різних сполученнях один з одним, зокрема: - можна, наприклад, здійснити, перший раз, етапи з b) по d), розміщуючи кожний ультразвуковий зонд на зовнішній поверхні стінки для того, щоб сформувати карти, характерні для положень і орієнтацій показань відображених сигналів всередині стінки, після чого можна здійснити, другий раз, щонайменше етапи b) і d), розміщуючи щонайменше один ультразвуковий зонд на внутрішній поверхні стінки в деякому третьому місці, яке вибирається в залежності від її профілів, а потім проаналізувати з використанням кожного зонда третю вибрану ділянку стінки в третьому вибраному кутовому секторі, орієнтованому вздовж щонайменше одного вибраного подовжнього або поперечного напряму, для того, щоб одержати дані аналізу для різних відносних кутових положень осі по відношенню до зонда і сформувати карти, характерні для положень і орієнтацій показань відображених сигналів всередині стінки; - можна, наприклад, здійснити етапи з b) по d) щонайменше один раз, розміщуючи кожний ультразвуковий зонд на зовнішній або внутрішній поверхні стінки для того, щоб виконати ультразвуковий аналіз в кутовому секторі, орієнтованому вздовж подовжнього напряму, і сформувати таким чином карти, характерні для поперечних орієнтацій і положень показань відображених сигналів всередині стінки, а потім можна знов виконати етапи з b) по d) ще щонайменше один раз, розміщуючи щонайменше один ультразвуковий зонд на зовнішній або внутрішній поверхні стінки для того, щоб виконати ультразвуковий аналіз в кутовому секторі, орієнтованому вздовж поперечного напряму, і сформувати таким чином карти, характерні для подовжніх орієнтацій і положень показань відображених сигналів всередині цієї стінки; - після здійснення етапу d) можна, наприклад, передбачити етап е), на якому здійснюють аналіз щонайменше зовнішньої поверхні стінки за допомогою іншої технології аналізу, відмінної від технології, основаної на використанні ультразвуку, для того, щоб одержати дані аналізу для різних відносних кутових положень щонайменше одного зонда по відношенню до осі, а також можливий етап f), на якому на основі цих одержаних даних аналізу формують карти, характерні для положень і орієнтацій показань поверхні стінки; - наприклад, ця інша технологія аналізу може бути вибрана серед так званої технології потоку витоку і так званої технології з використанням струмів Фуко; - можна, наприклад, аналізувати кожний з перших, других і можливих третіх ділянок стінки за допомогою відносного подовжнього переміщення щонайменше одного зонда по відношенню до осі і/або за допомогою електронного сканування з використанням щонайменше одного зонда; - в процесі здійснення щонайменше одного з етапів b), с) і е) можна, наприклад, забезпечити різні відносні кутові положення осі по відношенню до кожного зонда, або приводячи у обертання цю вісь по відношенню до кожного зонда, або приводячи у обертання кожний зонд по відношенню до цієї осі; - спосіб, що пропонується може включати етап g), на якому порівнюють дані з карт, які були одержані в процесі етапу d), з даними з перших еталонних карт, які заздалегідь були одержані на першій еталонній осі того ж типу, що і вісь, що контролюється, але позбавленої дефектів, для того, щоб запам'ятати тільки ті дані, які характерні для показань відображених сигналів, не представленого в цих перших еталонних картах, і сформувати, таким чином, "скореговані" карти; - спосіб, що пропонується може включати етап h), на якому порівнюють дані з карт, які були одержані в процесі етапу d) або g), з даними з других еталонних карт, які були одержані на другій еталонній колісній осі того ж типу, що і вісь, що контролюється, але що містить відомі дефекти, для того, щоб запам'ятати тільки ті дані, які характерні для показань відображених 2 UA 98964 C2 5 10 15 20 25 30 35 40 45 50 55 60 сигналів, характерного для відомих дефектів, присутніх у других еталонних каргах, і сформувати, таким чином, карти дефектів; - спосіб, що пропонується може включати етап і), на якому порівнюють амплітуди даних з карт, які були одержані в процесі етапу d) або g), з вибраною пороговою амплітудою для того, щоб запам'ятати тільки ті дані, які характерні для показань відображених сигналів, амплітуди яких перевищують згадану порогову амплітуду і які, отже, сигналізують про наявність дефектів, і сформувати, таким чином, карти дефектів; - у випадку виявлення амплітуди, що перевищує порогову амплітуду, можна, у випадку необхідності, генерувати попереджаючий сигнал; - спосіб, що пропонується, може включати етап j), що перебуває у відображенні щонайменше однієї карти на екрані; - можна, наприклад, використовувати зонди, здатні випромінювати ультразвук вздовж одного єдиного напряму із змінним кутом; - наприклад, кут може змінюватися між приблизно 0° і приблизно 70° по відношенню до подовжнього або поперечного напряму; - як варіант реалізації можна, наприклад, використовувати так звані вимірювальні зонди з фазованою решіткою (або "phased array"), здатною випромінювати ультразвук вздовж напрямів, які укладені у вибраному кутовому секторі; - наприклад, згаданий кутовий сектор може бути укладений між приблизно 0° і приблизно 70° по відношенню до подовжнього або поперечного напряму. Тут потрібно зазначити, що етапи з а) по d) повинні здійснюватися в цьому порядку, але що інші згадані вище етапи з е) по j) не обов'язково повинні виконуватися в цьому порядку. Зокрема, етап j) може бути здійснений безпосередньо після етапу d). У даному винаході також пропонується пристрій контролю колісних осей, призначений для здійснення представленого в попередньому викладі способу. Цей пристрій, кажучи більш конкретно, має в своєму складі: - контрольний стенд, виконаний з можливістю прийому трубчастої колісної осі, що містить стінку, яка має профілі із змінними і відомими зовнішнім і внутрішнім радіусами; - щонайменше один ультразвуковий зонд, виконаний з можливістю аналізу щонайменше однієї вибраної ділянки цієї стінки у вибраному кутовому секторі і одержання, таким чином, даних аналізу; - засоби контролю, виконані з можливістю керування контрольним стендом таким чином, щоб розміщувати кожний зонд на зовнішній або внутрішній поверхні стінки в першому місці, яке вибирається в залежності від її профілів, і можливого загромадження даної осі, таким чином, щоб згаданий зонд аналізував щонайменше одну першу вибрану ділянку і щонайменше одна друга вибрана ділянка стінки відповідно в щонайменше одному першому і в щонайменше одному другому вибраних кутових секторах, орієнтованих вздовж першого і другого подовжніх або поперечних протилежних напрямів, і щоб він одержував, таким чином, дані аналізу для різних відносних кутових положень осі по відношенню до нього; - засоби обробки, виконані з можливістю формування, на основі одержаних даних аналізу, карт, що представляють подовжні або поперечні орієнтації і подовжні і поперечні положення свідчення відображених сигналів всередині стінки. Цей пристрій відповідно до винаходу, що пропонується може мати множину варіантів реалізації, в яких можуть бути скомбіновані між собою щонайменше деякі з наведених нижче ознак: - його засоби контролю можуть бути виконані з можливістю контролю, перший раз, відносного переміщення кожного зонда по відношенню до зовнішньої поверхні стінки для того, щоб він одержав дані аналізу для різних відносних кутових положень осі по відношенню до нього, з подальшим контролем, другий раз, відносного переміщення щонайменше одного зонда по відношенню до внутрішньої поверхні стінки для того, щоб аналізувати щонайменше одну вибрану третю ділянку стінки в щонайменше одному третьому кутовому секторі, орієнтованому вздовж вибраного подовжнього або поперечного напряму, і для одержання, таким чином, інших даних аналізу для різних відносних кутових положень осі по відношенню до цього вимірювального зонда. У цьому випадку засобу обробки виконані з можливістю формування, на основі одержаних даних аналізу, карт, що представляють положення і орієнтації свідчення відображених сигналів всередині стінки; - засоби контролю цього пристрою можуть бути виконані з можливістю, і) контролю щонайменше перший раз, відносного переміщення кожного зонда по відношенню до зовнішньої або внутрішньої поверхні стінки для того, щоб він здійснював ультразвуковий аналіз в кутовому секторі, орієнтованому вздовж подовжнього напряму, і для того, щоб він одержував дані 3 UA 98964 C2 5 10 15 20 25 30 35 40 45 50 55 60 аналізу, на основі яких засоби обробки сформують карти, характерні для поперечних орієнтацій і положень показань відображених сигналів, потім іі) контролю щонайменше другий раз, відносного переміщення кожного вимірювального зонда по відношенню до зовнішньої або внутрішньої поверхні стінки для того, щоб він здійснював ультразвуковий аналіз в кутовому секторі, орієнтованому вздовж поперечного напряму, і щоб він одержував дані аналізу, на основі яких засоби обробки сформують карти, характерні для подовжніх орієнтацій і положень показань відображених сигналів; - цей пристрій може мати в своєму складі засобу аналізу поверхні, виконані з можливістю аналізу щонайменше зовнішньої поверхні стінки за допомогою іншої технології аналізу, відмінної від технології, основаної на використанні ультразвуку, для того, щоб одержати дані аналізу для різних відносних положень осі по відношенню до зонда. У цьому випадку засобу обробки можуть, у випадку необхідності, бути виконані з можливістю формування, на основі цих даних аналізу (вилучених за допомогою засобів аналізу поверхні), карт, що представляють положення і орієнтації свідчення поверхні даної стінки; - наприклад, згадані засоби аналізу поверхні вибираються серед засобів аналізу за допомогою потоку витоку і засобів аналізу за допомогою струмів Фуко; - цей пристрій може мати в своєму складі засобу переміщення, виконані з можливістю забезпечення відносного переміщення в подовжньому напрямі щонайменше одного зонда по відношенню до осі. У цьому випадку засоби контролю даного пристрою виконані з можливістю контролю згаданих засобів переміщення для того, щоб вони переміщували подовжньо і відносно щонайменше один зонд по відношенню до осі для того, щоб він аналізував частину щонайменше перших, других і можливих третіх ділянок стінки; - як варіант реалізації, або в доповнення до нього, засоби контролю цього пристрою можуть бути виконані з можливістю здійснення електронного сканування з використанням щонайменше одного зонда для того, щоб він аналізував частину щонайменше перших, других і можливих третіх ділянок стінки; - стенд цього пристрою може бути виконаний з можливістю приведення у обертання осі по відношенню до кожного зонда для того, щоб визначити різні відносні кутові положення цієї осі по відношенню до зонда. У якості варіанті реалізації, згаданий стенд може бути виконаний з можливістю приведення у обертання щонайменше одного зонда по відношенню до осі для того, щоб визначити різні відносні кутові положення цієї осі по відношенню до згаданого зонда; - засоби обробки пристрою, що пропонуються, можуть бути виконані з можливістю порівняння даних з карт, одержаних на підлягаючій контролю осі, з даними з перших еталонних карт, які були одержані на першій еталонній колісній осі того ж типу, що і вісь, що контролюється, але позбавленої дефектів, і запам'ятовування тільки тих даних, які є характерними для показань відображених сигналів, яке не було представлені в перших еталонних картах, і формування, таким чином, скорегованих карт; - засоби обробки цього пристрою можуть бути виконані з можливістю порівняння даних з карт, одержаних на підлягаючій контролю осі, з даними других еталонних карт, одержаних на другій еталонній осі того ж типу, що і вісь, що контролюється, але що містить відомі дефекти, і запам'ятовування тільки даних, характерних для показань відображених сигналів, характерного для відомих дефектів, присутніх в згаданих других еталонних картах, і формування, таким чином, карт дефектів; - засоби обробки пристрою, що пропонується можуть бути виконані з можливістю порівняння амплітуд даних з карт, одержаних на підлягаючій контролю колісній осі, з вибраною пороговою амплітудою і запам'ятовування тільки даних, характерних для показань відображених сигналів, амплітуди яких перевищують цієї порогової амплітуди і сигналізують про наявність дефектів, а також формування, таким чином, карт дефектів; - засоби обробки пристрою, що пропонується, можуть бути виконані з можливістю генерування попереджаючого сигналу у випадку виявлення амплітуди, що перевищує згадану порогову амплітуду; - пристрій, що пропонується може мати в своєму складі екран, здатний відображати щонайменше деякі з карт, які були сформовані за допомогою засобів обробки даного пристрою; - кожний зонд може, наприклад, бути виконаний з можливістю випромінювання ультразвуку вздовж одного єдиного напряму із змінним кутом, наприклад, між приблизно 0°і приблизно 70°, по відношенню до подовжнього або до поперечного напряму; - як варіант реалізації, кожний зонд може являти собою, наприклад, так званий зонд з фазованою решіткою і може забезпечувати випромінювання ультразвуку вздовж напрямів, укладених у вибраному кутовому секторі, наприклад, укладеному між приблизно 0° і приблизно 70° по відношенню до подовжнього або поперечного напряму. 4 UA 98964 C2 5 10 15 20 25 30 35 40 45 50 55 60 Інші характеристики і переваги винаходу, що пропонується будуть краще зрозумілі з наведеного нижче опису прикладів його реалізації, де даються посилання на приведені в додатку креслення, серед яких: - Фіг.1 являє собою схематичний вигляд в подовжньому розрізі, ілюструючий приклад трубчастої колісної осі, що не містить обладнання; - Фіг.2 являє собою схематичний вигляд в подовжньому розрізі, що ілюструє частину прикладу трубчастої колісної осі, забезпеченої обладнанням; - Фіг.3 схематично і функціонально, ілюструє приклад реалізації пристрою контролю відповідно до винаходу, що пропонується; - Фіг.4А і 4В схематично представляють два приклади розміщення зонда в двох різних вибраних місцях зовнішньої поверхні частини стінки осі (в перспективному вигляді) для здійснення подовжнього аналізу; - Фіг.5 схематично представляє приклад розміщення зонда на вибраному місці зовнішньої поверхні частини стінки осі (в перспективному уявленні) з метою виконання поперечного аналізу; - Фіг.6 схематично представляє приклад розміщення зонда на вибраному місці внутрішньої поверхні частини стінки осі (в перспективному уявленні) з метою виконання подовжнього аналізу; - Фіг.7А-7С представляють перші ділянки частини стінки, покриті трьома однонаправленими зондами, що зміщаються подовжньо праворуч наліво для кутів випромінювання, відповідно рівних 30°, 45° і 60° і орієнтованих вздовж першого подовжнього напряму; - Фіг.8А-8С ілюструють другі ділянки частини стінки, показані на Фіг.7А-7С, покриті трьома такими ж однонаправленими зондами, що зміщаються подовжньо зліва направо для кутів випромінювання, відповідно рівних 30°, 45° і 60° і орієнтованих вздовж другого подовжнього напряму; - Фіг.9А і 9В ілюструють перші і другі ділянки частини стінки, показані на Фіг.7А-7С, покриті трьома зондами з фазованою решіткою для кутових секторів, укладених між 30° і 70° і орієнтованих відповідно вздовж першого і другого подовжніх напрямів; - Фіг.10 ілюструє третю ділянку частини стінки, покритої одним зондом з фазованою решіткою, розміщеною на внутрішній поверхні, для кутового сектора, укладеного між 30° і 70° і орієнтованого вздовж подовжнього напряму; - Фіг.11А і 11В ілюструють два приклади карт, одержаних на одній і тій же стінці колісної осі. Наведені в додатку креслення можуть бути використані не тільки для доповнення опису винаходу, що пропонується, але також можуть, у випадку необхідності, сприяти визначенню цього винаходу. Технічна задача винаходу, що пропонується полягає в тому, щоб забезпечити можливість виконання щонайменше напівавтоматичним чином неруйнуючого контролю більшої частини і навіть всієї трубчастої колісної осі, якщо це можливе, причому і в тому випадку, коли ця вісь забезпечена обладнанням. У подальшому викладі мається на увазі, що підлягаючі контролю трубчасті осі являють собою колісні осі для товарних або пасажирських залізничних вагонів. Однак, винахід, що пропонується, не обмежується цим типом застосування. По суті цей винахід торкається будьякого виробу у вигляді порожнистого (трубчастого) тіла обертання, що зазнає в процесі експлуатації впливу механічних напружень, зокрема, втомлюваних напружень, і стінка якого містить профілі із змінними і відомими зовнішнім і внутрішнім радіусами. Як це подане на Фіг.1, трубчаста (колісна) вісь АЕ містить стінку РА, яка визначена за допомогою виконання операції гарячого кування і механічної обробки і яка зрештою представляє профілі із змінними зовнішнім R1 і внутрішнім R2 радіусами. Тут потрібно зазначити, що товщина цієї стінки в радіальному напрямі (тобто вздовж напряму, перпендикулярного по відношенню до подовжньої осі XX) не обов'язково є постійною. Кажучи іншими словами, профілі із зовнішнім R1 і внутрішнім R2 радіусами, не обов'язково піддаються накладенню з точністю до гомотетії. Автоматичний контроль осі цього типу, чи позбавлена вона додаткового обладнання, як це показане в прикладі, проілюстрованому на Фіг.1, або забезпечена цим додатковим обладнанням EQ (таким, зокрема, як колеса і/або гальмові диски), як це показане в прикладі, проілюстрованому на Фіг.2, здійснюється за допомогою пристрою контролю типу того, який схематично і функціонально проілюстрований на Фіг.3. Такий пристрій має в своєму складі щонайменше один контрольний стенд ВР, щонайменше один ультразвуковий зонд SU (тут представлені три таких зонди), модуль "контролю МС і модуль обробки МТ, а також, переважним чином, екран EC. 5 UA 98964 C2 5 10 15 20 25 30 35 40 45 50 55 60 Тут потрібно зазначити, що модуль контролю МС, модуль обробки МТ і екран EC можуть являти собою частину мікрокомп'ютера (або частина робочої станції) МО, сполученого з контрольним стендом ВР і з кожним зондом SU, як це проілюстроване як що не є обмежувальним прикладу на Фіг.3. У подальшому викладі передбачається, що пристрій, що пропонується має в своєму складі щонайменше два зонди SU. Контрольний стенд ВР має в своєму складі, наприклад, опори MS, на яких може бути встановлена колісна вісь АЕ (разом з своїм обладнанням або без нього), і привідний вали АВ, призначена для приведення цієї колісної осі у обертання відповідно до вибраних кутових ділянок у випадку прийому інструкцій, що видаються з модуля МС контролю. Тут потрібно зазначити, що вибрана кутова ділянка у випадку необхідності може дорівнювати 360°, що відповідає повному обороту. Тут також потрібно зазначити, що можна обійтися від опор MS, оскільки привідні вали АВ самі мають можливість також і утримувати колісну вісь АЕ. Зрозуміло, може бути розглянуто і будь-який інший засіб, що забезпечує можливість приведення колісної осі АЕ у обертання. Тут важливо зазначити, що в цьому випадку істотна лише та обставина, що стенд ВР може бути виконаний з можливістю або приведення колісної осі АЕ у обертання по відношенню до зондів SU з метою визначення різних відносних кутових положень цієї колісної осі АЕ по відношенню до зондів SU, або приведення цих зондів SU у обертання по відношенню до колісної осі АЕ з метою визначення різних відносних кутових положень цієї колісної осі АЕ по відношенню до зондів SU. Кажучи іншими словами, стенд ВР контролює відносне позиціонування колісної осі АЕ по відношенню до зондів SU. У подальшому викладі, як що не є обмежувальним прикладу, вважається, що стенд ВР має можливість приводити у обертання вісь АЕ по відношенню до зондів SU. Ультразвукові зонди SU можуть бути виконані або з можливістю випромінювання ультразвуку вздовж одного єдиного напряму, кут якого вибирається і може бути змінений в залежності від конкретних потреб, або вони можуть являти собою так звані зонди з фазованою решіткою (або "phased array"), тобто виконані таким чином, щоб випромінювати ультразвук вздовж множини напрямів, укладених в кутовому секторі, вибираному в залежності від конкретних потреб (за допомогою електронного кутового сканування). Можна також забезпечити еквівалент подовжнього переміщення датчика за допомогою електронного сканування. У першому випадку (однонаправленому) кожний зонд SU містить один єдиний елемент детектування, виконаний з можливістю прийому відображених сигналів, що поступають з стінки РА, що є об'єктом аналізу. У другому випадку (зонд з фазованою решіткою) кожний зонд SU містить декілька елементів детектування, виконаних з можливістю прийому відображених сигналів, що поступають з стінки РА, що с об'єктом аналізу, після заломлення і/або відображення (у деяких разах численного) під різними кутами. Тут потрібно нагадати, що елементи детектування звичайно виготовляються з композитного матеріалу і встановлюються на перетворювачах. Коли елементи детектування зонда збуджені, вони проводять пучок випромінювання, що розходяться для аналізу. Форма цих пучок і його загальний напрям падіння можуть бути змінені електронним чином шляхом введення затримок за часом на рівні моментів збудження вибраних елементів детектування зонда. Звичайно називають "віртуальним зондом" комбінацію елементів детектування зонда і можливих пов'язаних з ними затримок за часом, які використовуються для виробництва пучок аналізу в загальному заданому напрямі. Таким чином, зонд з фазованою решіткою має можливість формувати декілька (наприклад, декілька десятків) віртуальних зондів в залежності від комбінацій, об'єктом яких він є. Частота збудження перетворювачів звичайно має величину порядку декількох мегагерц (наприклад, від 2 МГц до 5 МГц). У тому випадку, коли ці перетворювачі не збуджені для випромінювання, ці ж елементи детектування служать для детектування відображених сигналів, що поступають від поверхонь розділу між матеріалом і повітрям або матеріалом і рідиною, а також від нестач і дефектів. Таким чином, ці елементи детектування утворюють датчики типу передавач/приймач. Профілі з внутрішнім радіусом R2 і зовнішнім радіусом R1, які має стінка РА, і можливі загромадження осі АЕ аналізуються, наприклад, за допомогою програмного забезпечення моделювання типу CIVA 8.0 (розробленої і поширюваної на ринку Комісаріатом Атомної Енергетики (СЕА)), таким чином, щоб визначити кількість зондів SU, які будуть необхідні для аналізу всієї або тільки вибраної частини осі АЕ, беручи до уваги тип цих зондів (однонаправлений або з фазованою решіткою (і в цьому другому випадку з урахуванням кількості елементів детектування)), що використовується і з урахуванням того, що вони можуть бути орієнтовані таким чином, щоб здійснювати подовжній аналіз або поперечний аналіз вздовж першого і другого протилежних напрямів. Тут під виразом "подовжній аналіз" потрібно розуміти аналіз, здійснюваний з метою пошуку дефектів і/або недоліків, орієнтованих переважним чином в подовжньому напрямі або під 6 UA 98964 C2 5 10 15 20 25 30 35 40 45 50 55 60 невеликим гострим кутом до цього подовжнього напряму XX (гострий кут звичайно менше ±25° і переважним чином менше ±5°). Іноді використовують термін "похиле положення" для того, щоб визначити таку орієнтацію дефекту. Цей аналіз здійснюється за допомогою пучка, що випромінюються вздовж напряму, перпендикулярного по відношенню до подовжнього напряму XX, тобто загальний напрям якого по суті розташовується в площині, перпендикулярній до подовжнього напряму XX або складає невеликий гострий кут (звичайно менше ±10°) по відношенню до цього перпендикулярного напряму. У той же час, тут під виразом "поперечний аналіз" потрібно розуміти аналіз, здійснюваний з метою пошуку дефектів і/або недоліків, орієнтованих переважним чином в поперечному напрямі або під невеликим гострим кутом по відношенню до площини, перпендикулярної до подовжнього напряму XX (цей гострий кут звичайно менше ±25° і переважним чином менше ±5°). Іноді використовують термін "похиле положення" для того, щоб визначити таку орієнтацію дефекту. Цей аналіз здійснюється за допомогою пучка, що випромінюються вздовж напряму, паралельного по відношенню до подовжнього напряму XX, тобто загальне напряму якого по суті розташовується в площині, яка сама містить подовжній напрям XX або складає невеликий гострий кут (звичайно менше ±10°) з цим подовжнім напрямом. Беручи до уваги форми профілів з внутрішнім R2 і зовнішнім R1 радіусами, які звичайно має стінка РА осей АЕ, і звичайне загромадження цих осей, кут випромінювання однонаправленого зонда SU звичайно повинен мати можливість змінюватися між приблизно 0° і приблизно 70° по відношенню до подовжньої осі XX, і кутовий сектор випромінювання зонда SU з фазованою решіткою звичайно повинен бути укладений між приблизно 0° і приблизно 70° по відношенню до подовжньої осі XX. Після того, як для кожного зонда SU визначено вибране (перше) місце розташування, де цей зонд повинен бути спочатку розміщений по відношенню до осі АЕ таким чином, щоб аналізувати першу вибрану ділянку стінки РА в першому вибраному кутовому секторі, орієнтованому вздовж першого подовжнього або поперечного напряму, а також можливе вибране (друге) місце, де цей зонд повинен бути згодом розміщений відносно осі АЕ таким чином, щоб аналізувати другу вибрану ділянку стінки РА у другому вибраному кутовому секторі, орієнтованому вздовж другого подовжнього або поперечного напряму, протилежного першому напряму, можна розмістити зонди SU в їх перших відповідних вибраних місцях. Це відносне розміщення зондів SU по відношенню до осі АЕ може здійснюватися в перших вибраних місцях, які розташовуються або на зовнішній поверхні SE стінки РА, або на внутрішній поверхні SI цієї стінки РА, в залежності від реальних потреб (і конфігурації даної осі АЕ). Можна, наприклад, почати з виконання ультразвукового аналізу, розміщуючи зонди SU на зовнішній поверхні SE стінки РА, доповнюючи, потім, цей аналіз, у випадку необхідності, шляхом розміщення зондів SU на внутрішній поверхні SI стінки РА (тобто всередині трубчастої осі АЕ). Однак, варіант дій в зворотному порядку також можливий. З'єднання між зондами SU і внутрішньою поверхнею SI або зовнішньою поверхнею SE стінки РА може здійснюватися за допомогою будь-якого засобу, відомого фахівцеві в даній галузі техніки, зокрема, за допомогою гліцерину або за допомогою занурення у воду, переважним чином змішану з протикорозійним продуктом. На Фіг.4А і 4В представлені два приклади відносного розміщення зонда SU в двох вибраних місцях зовнішньої поверхні SE частини стінки РА осі АЕ з метою виконання подовжнього аналізу. На Фіг.5 також представлений приклад відносного розміщення зонда SU у вибраному місці зовнішньої поверхні SE частини стінки РА осі АЕ з метою виконання поперечного аналізу. На Фіг.6 також представлений приклад відносного розміщення зонда SU у вибраному місці внутрішньої поверхні SI частини стінки РА осі АЕ з метою виконання подовжнього аналізу. Тут важливо зазначити, що зонд SU має можливість аналізувати ділянку, яка була для нього призначеною, або залишаючись на рівні вибраного місця, або переміщаючись відносно і в подовжньому напрямі і/або в поперечному напрямі між вихідним положенням (відповідним спочатку вибраному місцю) і кінцевим положенням (відповідним іншому вибраному місцю), у випадку необхідності, через одне або декілька проміжних положень (кожне з яких відповідає іншому вибраному місцю). Ці відносні переміщення зонда(ів) SU можуть бути здійснені за допомогою засобів MD переміщення, які пов'язані з цими зондами. При цьому кожний засіб MD переміщення являє собою, наприклад, тримач зонда, встановлений з можливістю поступального переміщення по відношенню до стенда ВР таким чином, щоб мати можливість бути переміщеним в подовжньому напрямі в залежності від інструкцій, що видаються модулем МС контролю. Тут потрібно зазначити, що кожний держатель MD зонда у випадку необхідності може бути приведений у обертання таким чином, щоб змінити орієнтацію свого зонда SU або на кут 180° так, щоб цей 7 UA 98964 C2 5 10 15 20 25 30 35 40 45 50 55 60 зонд мав можливість перейти від подовжнього або поперечного аналізу (загальний напрям випромінювання, перпендикулярний по відношенню до подовжнього напряму XX) в першому вибраному кутовому секторі, орієнтованому вздовж першого подовжнього або поперечного напряму, до подовжнього або поперечного аналізу у другому вибраному кутовому секторі, орієнтованому вздовж другого подовжнього або поперечного напряму, протилежного першому напряму, або на кут 90° таким чином, щоб цей зонд мав можливість перейти від подовжнього аналізу в першому і другому вибраних кутових секторах до поперечного аналізу в третьому вибраному кутовому секторі, і навпаки. Можна також розглядати здійснення аналізу, що є результатом комбінованого подовжнього і поперечного переміщення. Тут потрібно зазначити, що зонди SU можуть бути нерухомо зафіксовані, тоді як стенд ВР може переміщувати в подовжньому напрямі вісь АЕ і/або може приводити її у обертання. Також є можливість переміщувати зонди SU подовжньо по відношенню до осі АЕ і приводити останню у обертання, або навпаки. Як варіант реалізації модуль МС контролю може забезпечувати здійснення електронного сканування з використанням щонайменше деяких зондів SU для того, щоб вони аналізували частину щонайменше перших, других і можливих третіх ділянок стінки РА. Тут потрібно нагадати, що електронне сканування забезпечується для зонда SU шляхом використання деяких з цих елементів детектування, розташованих у вибраних місцях його фазованої решітки, і привласнення цим вибраним елементам детектування вибраних затримок за часом таким чином, щоб вони випромінювали послідовно. Цей "електронний" спосіб переміщення є переважним, оскільки він дозволяє відмовитися від механічного переміщення зонда SU. Тут потрібно зазначити, що може бути також розглянуто поєднання одночасного переміщення в подовжньому напрямі (механічного) і електронного сканування для того, щоб забезпечити, щонайменше для деяких зондів SU, можливість аналізу ділянки стінки, який був для них призначений. У цьому випадку саме модуль МС контролю може забезпечувати створення інструкцій, необхідних для засобів MD переміщення для забезпечення відносних і подовжніх переміщень вибраних зондів SU, і інструкцій, необхідних для вибраних зондів SU, щоб спричинити електронне сканування. Також потрібно зазначити, що технічне рішення, що використовується для аналізу будь-якої вибраної ділянки стінки РА, залежить від типу зонда, що є SU і, крім того, у випадку зондів з фазованою решіткою, від кількості елементів детектування, які їх утворюють. Дійсно, зрозуміло, що якщо кількість елементів детектування зонда SU адаптована для покриття ділянки стінки РА, яка призначена цьому зонду, марно передбачати механічне переміщення в подовжньому напрямі, оскільки його можна замінити електронним скануванням. Як приклад можна сказати, що якщо зонд SU повинен покривати ділянку стінки РА, що має подовжню протяжність, рівну 100 мм, цей зонд повинен містити щонайменше 200 елементів детектування розміром 0,5 мм, попарно відділених один від одного, наприклад, відстанню, що становить приблизно 0,1 мм. Тут потрібно нагадати, що чим менше розміри елементів детектування, тим більше широкими можуть бути кутові сектори аналізу. Може бути знайдений компроміс між кількістю елементів детектування зондів SU і можливостями розширення покриття, що забезпечується за допомогою електронного сканування, таким чином, щоб виключити механічні подовжні переміщення. Тут також потрібно зазначити, що використання зондів з фазованою решіткою є більш переважним, ніж використання однонаправлених зондів, оскільки зонди з фазованою решіткою дозволяють забезпечити кращу безперервність аналізу в одному і тому ж кутовому секторі, виключаючи всяке кутове переміщення ультразвукового джерела. Відповідно до винаходу, що пропонується після того, як вимірювальні зонди були розміщені на зовнішній поверхні SE або на внутрішній поверхні SI стінки РА в перших місцях (вибраних в залежності від її профілів і можливого загромадження осі АЕ), кожний з цих зондів SU приступає до аналізу першої ділянки стінки РА, який був для нього призначений, в першому вибраному кутовому секторі, який орієнтований вздовж першого подовжнього або поперечного напряму. Кожний зонд SU може, таким чином, одержувати дані аналізу для поточного відносного положення осі АЕ по відношенню до згаданого зонда SU. Приводячи вісь АЕ у обертання на послідовно розташованих вибраних кутових секторах (тут за допомогою контрольного стенда ВР і, наприклад, за допомогою його привідних валів АВ), кожний зонд SU може здійснювати нове одержання даних аналізу після кожного кутового переміщення. Таким чином, можна мати в своєму розпорядженні дані аналізу, що відносяться до всієї сукупності кола кожної першої ділянки стінки, що контролюється РА. Ці дані аналізу містять, наприклад, кути випромінювання, моменти випромінювання і прийому ультразвуку (або те, що еквівалентно часовим інтервалам між моментами 8 UA 98964 C2 5 10 15 20 25 30 35 40 45 50 55 60 випромінювання і прийому), і кути прийому. Вони передаються зондами SU, наприклад, в модуль МС контролю, який призначений для зберігання цих даних в запам'ятовуючому пристрої МУ відповідно до подовжніх і кутових положень перших ділянок, що контролюються, по відношенню до вибраної системи координат, а також, у випадку необхідності, ідентифікатор зонда SU, використаного для одержання згаданих даних. Потім щонайменше деякі із зондів SU знов розміщуються (відносно) на зовнішній поверхні SE або на внутрішній поверхні SI стінки РА у другі місця (вибрані в залежності від профілів цієї стінки і можливого загромадження осі АЕ), для того, щоб вони приступили до аналізу других ділянок стінки РА, які відповідно були для них призначені, у других вибраних кутових секторах, які орієнтовані вздовж другого подовжнього або поперечного напряму, протилежного першому напряму. Наприклад, якщо перший напрям відповідає напряму, що проходить зліва направо вздовж подовжньої осі XX, то другий напрям відповідає напряму, що проходить праворуч наліво вздовж цієї подовжньої осі XX. Таким же чином, якщо перший напрям відповідає напряму, що проходить зліва направо вздовж другої осі, перпендикулярної до подовжньої осі XX, то другий напрям відповідає напряму, що проходить праворуч наліво вздовж цієї другої осі. Кожний знов розміщений зонд SU може, таким чином, одержувати дані аналізу для поточного кутового положення осі АЕ. Приводячи цю вісь АЕ у обертання у вибраних кутових секторах, кожний зонд SU може здійснювати нове одержання даних аналізу після кожного кутового переміщення. Таким чином, можна мати в своєму розпорядженні дані аналізу, що відносяться до всієї сукупності кола кожної другої ділянки стінки, що контролюється РА. Ці дані аналізу передаються зондами SU, наприклад, в модуль МС контролю, який призначений для зберігання цих даних в запам'ятовуючому пристрої відповідно до подовжніх і кутових положень других ділянок, що контролюються по відношенню до вибраної системи координат, а також, у випадку необхідності, ідентифікатор зонда SU, використаного для одержання згаданих даних. Завдяки цьому подвійному аналізу вздовж протилежних напрямів, можна проконтролювати всю або частину колісної осі АЕ (в залежності від конкретних потреб), як це схематично проілюстроване на Фіг.7-10. Кажучи більш конкретно: - на Фіг.7А-7С представлені перші ділянки частини стінки, які можуть бути покриті трьома однонаправленими вимірювальними зондами, розміщеними на зовнішній поверхні SE і переміщуваними відносно і подовжньо праворуч наліво, для кутів випромінювання, що складають відповідно 30°, 45° і 60° і орієнтованих вздовж першого подовжнього напряму (що проходить праворуч наліво); - на Фіг.8А-8С представлені другі ділянки тієї ж самої частини стінки, які можуть бути покриті трьома тими ж самими однонаправленими зондами, розміщеними на зовнішній поверхні SE і переміщуваними відносно і подовжньо зліва направо, для кутів випромінювання, що складають відповідно 30°, 45° і 60° і орієнтованих вздовж другого подовжнього напряму (що проходить зліва направо); - на Фіг.9А представлені перші ділянки тієї ж самої частини стінки, які можуть бути покриті трьома зондами з фазованою решіткою, розміщеною на зовнішній поверхні SE, для кутового сектора, укладеного між 30° і 70° і орієнтованого вздовж першого подовжнього напряму (що проходить праворуч наліво); - на Фіг.9В представлені другі ділянки тієї ж самої частини стінки, які можуть бути покриті трьома зондами з фазованою решіткою, розміщеною на зовнішній поверхні SE, для кутового сектора, укладеного між 30° і 70° і орієнтованого вздовж другого подовжнього напряму (що проходить зліва направо); - на Фіг.10 представлені треті ділянки тієї ж самої частини стінки, які можуть бути покриті одним зондом з фазованою решіткою, розміщеною на внутрішній поверхні SI, для кутового сектора, укладеного між 30° і 70° і орієнтованого вздовж подовжнього напряму (що проходить зліва направо). Беручи до уваги форми профілів з внутрішнім R2 і зовнішнім R1 радіусами, які звичайно має стінка РА осей АЕ, і звичайне загромадження цих осей, кут випромінювання однонаправленого зонда SU звичайно повинен мати можливість змінюватися між приблизно 0° і приблизно 70° по відношенню до подовжнього напряму XX або до поперечного напряму, і кутовий сектор випромінювання зонда SU з фазованою решіткою звичайно повинен бути укладений між приблизно 0° і приблизно 70° по відношенню до подовжнього напряму XX або до поперечного напряму. У прикладах реалізації, представлених на Фіг.7-10, кожна двонаправлена стрілка демонструє подовжню протяжність (першої) ділянки, що аналізується одним зондом SU (розміщеним зверху). Повинно бути зрозуміло, що загромадження колісної осі АЕ в певних її 9 UA 98964 C2 5 10 15 20 25 30 35 40 45 50 55 частинах істотно знижує подовжню протяжність ділянок, яка може бути технічно проаналізована (тобто покрита) одним і тим же зондом SU. Це, зокрема, стосується частин, які розташовуються під колесами і які мають більш високу імовірність вмісту структурних дефектів, викликаних насадженням на цю вісь коліс з натягом і/або впливаючими навантаженнями, внаслідок чого ці ділянки повинні бути об'єктом як можна більш точного і як можна більш повного контролю (аналізу). Накопичені дані аналізу витягуються модулем МТ обробки, який потім забезпечує їх групування в залежності від зон осі, до яких вони відносяться, таким чином, щоб сформувати карти, які представляють поперечні або подовжні орієнтації і положення свідчення відображених сигналів всередині стінки РА. Тут потрібно нагадати, що свідчення відображених сигналів є результатом відображення або на поверхні розділення матеріалу з повітрям або матеріалу з рідиною, або на недоліку, або на дефекті. Також потрібно нагадати, що подовжні аналізи більш специфічним чином адаптовані для виявлення поперечних нестач і дефектів (які звичайно зустрічаються найчастіше), тоді як поперечні аналізи більш специфічним чином адаптовані для виявлення подовжніх нестач і дефектів. Факт контролю матеріалів вздовж двох протилежних напрямів і, отже, вздовж вельми різних напрямів аналізу, дозволяє виявляти недоліки і дефекти менших розмірів і, отже, виявляти більшу кількість таких нестач і дефектів, ніж при використанні способів і пристроїв контролю, відомих з існуючого рівня техніки і адаптованих до суцільних (або масивним) осей. Але це дозволяє також забезпечити задовільне виявлення косих або похилих нестач і дефектів (або "tiltes") всередині стінки РА. Тут потрібно зазначити, що модуль МТ обробки у випадку необхідності може бути виконаний таким чином, щоб здійснювати "кореляції" між даними аналізу, що відносяться до ідентичних зон, створюючих зони перекриття першої (перших) і/або другої (других) ділянок стінки. Вони можуть, таким чином, сформувати так звані "необроблені" карти цих зон перекриття, у випадку необхідності трьохмірного типу (3D). Файли даних, що формують необроблені карти, переважним чином зберігаються в запам'ятовуючому пристрої МУ. При цьому ці карти можуть бути або відображатися індивідуальним чином (одні за іншими) або груповим чином (декілька карт одночасно) на екрані EC з метою їх аналізу фахівцем, або спочатку проаналізовані автоматизованим чином, а потім перетворені в "скореговані" карти або карти "дефектів", які можуть бути відображені на екрані EC індивідуальним чином або груповим чином. На "необроблених" картах можуть бути виконані декілька типів порівняльного аналізу. Так, наприклад, модуль МТ обробки може забезпечувати порівняння даних з щонайменше деяких карт, які були одержані на підлягаючій контролю осі АЕ, з даними з перших еталонних карт, які були одержані на першій еталонній осі того ж типу, що і вісь, що контролюється, але позбавленої дефектів. У цьому випадку модуль МТ обробки запам'ятовує тільки ті дані, які є характерними для показань відображених сигналів, не присутнього в згаданих перших еталонних картах, для того, щоб сформувати скореговані карти, які цей модуль зберігає в запам'ятовуючому пристрої МУ. Як варіант реалізації, або додатково, модуль МТ обробки може забезпечувати порівняння даних з щонайменше деяких карт (необроблених або скорегованих), які були одержані на підлягаючій контролю осі АЕ, з даними з других еталонних карт, які були одержані на другій еталонній осі того ж типу, що і вісь, що контролюється, але що містить відомі дефекти. У цьому випадку модуль МТ обробки запам'ятовує тільки ті дані, які є характерними для показань відображених сигналів, характерного для відомих дефектів, присутніх в згаданих других еталонних картах, для того, щоб сформувати карти дефектів, які цей модуль зберігає в запам'ятовуючому пристрої МУ. Як варіант реалізації, або додатково, модуль МТ обробки може забезпечувати порівняння амплітуд свідчення відображених сигналів, представлених на щонайменше деяких з карт, з вибраною пороговою амплітудою. У цьому випадку модуль МТ обробки запам'ятовує тільки ті дані, які є характерними для показань відображених сигналів, амплітуди яких перевищують вибрану порогову амплітуду і які внаслідок цього передбачаються вихідними від дефектів, для того, щоб сформувати карти дефектів. У той же час, можна також передбачити, щоб модуль МТ обробки генерував попереджаючий сигнал (звуковий або візуальний (що тобто відображається на екрані EC)) всякий раз, коли він виявляє, що амплітуда перевищує вибрану порогову амплітуду. 10 UA 98964 C2 5 10 15 20 25 30 35 40 45 50 55 60 На Фіг.11А і 11В представлені два приклади необроблених карт, одержаних на одній і тій же стінці РА колісної осі АЕ. Виявлені структурні дефекти позначені позиціями DS. Як вже було сказано в попередньому викладі, можна аналізувати стінку РА, переміщуючи зонди SU на зовнішній поверхні SE або на внутрішній поверхні SI. Однак, може також бути розглянуто здійснення подвійного аналізу, наприклад, починаючи з розміщення зондів SU на зовнішній поверхні SE стінки, а потім розміщуючи деякі з цих зондів SU на внутрішній поверхні SI стінки. Кажучи більш конкретно, в цьому випадку розміщують зонди SU на зовнішній поверхні SE стінки РА в перших вибраних місцях і аналізують за допомогою цих зондів SU перші вибрані ділянки стінки РА в перших вибраних кутових секторах, орієнтованих вздовж першого подовжнього (або поперечного) напряму з тим, щоб одержати дані аналізу для різних відносних кутових положень осі АЕ по відношенню до зондів SU. Потім розміщують щонайменше деякі із зондів SU на зовнішній поверхні SE стінки РА у других вибраних місцях і за допомогою цих зондів SU аналізують другі вибрані ділянки стінки РА у других вибраних кутових секторах, орієнтованих вздовж другого подовжнього (або поперечного) напряму, протилежного першому напряму, для того, щоб одержати дані аналізу для різних відносних кутових положень осі АЕ по відношенню до зондів SU. І, нарешті, розміщують щонайменше деякі із зондів SU на внутрішній поверхні SI стінки РА в третіх вибраних місцях і здійснюють аналіз з використанням цих зондів SU третіх вибраних ділянок стінки РА в третіх вибраних кутових секторах, орієнтованих вздовж щонайменше одного подовжнього (або поперечного) напряму, і навіть вздовж двох протилежних напрямів, для того, щоб одержати дані аналізу для різних відносних кутових положень осі АЕ по відношенню до зондів SU. Модуль МТ обробки формує, таким чином, на основі сукупності даних аналізу карти, характерні для положень і орієнтацій показань відображених сигналів всередині стінки РА. Цей подвійний аналіз із зовнішньої сторони і з внутрішньої сторони може забезпечити можливість покриття всіх ділянок підлягаючої контролю стінки РА, при тому, що це може виявитися неможливим за допомогою одного єдиного аналізу із зовнішньої сторони через профілі цієї стінки РА і/або загромадження осі АЕ. Є також можливість здійснювати перший подовжній аналіз в двох напрямах (як про це сказано вище) і із зовнішньої сторони (або з внутрішньої сторони), а потім другий поперечний аналіз в щонайменше одному напрямі і із зовнішньої сторони (або з внутрішньої сторони) таким чином, щоб сформувати карти, характерні для поперечних орієнтацій і положень показань відображених сигналів всередині стінки РА, і карти, характерні для подовжніх орієнтацій і положень показань відображених сигналів всередині тієї ж самої стінки РА. Є також можливість здійснювати перший подовжній аналіз в двох напрямах і із зовнішньої сторони, а потім другий поперечний аналіз в щонайменше одному напрямі і з внутрішньої сторони. Є також можливість здійснювати перший поперечний аналіз в двох напрямах і з внутрішньої сторони, а потім другий аналіз в щонайменше одному напрямі і із зовнішньої сторони. У загальному випадку можуть бути розглянуті будь-які поєднання подовжнього(іх) і поперечного(их) аналізів з внутрішньої сторони і із зовнішньої сторони. Потрібно зазначити, що аналізи з внутрішньої сторони можуть в деяких випадках вимагати повторної розточки щонайменше кінців трубчастої колісної осі АЕ з тим, щоб забезпечити можливість розміщення щонайменше одного зонда SU всередині цієї осі АЕ, на внутрішній поверхні її стінки РА, а також її можливе відносне переміщення відповідними засобами MD переміщення. Тут потрібно зазначити, що місця розміщення зондів SU, різні кути або різні кутові сектори аналізу за допомогою ультразвуку кожного із зондів SU і ділянки стінки, призначені різним зондам, у випадку необхідність може бути вибрана в залежності від існуючих вимог. Таким чином, можна передбачити, що частина контролю буде здійснена за допомогою пучка, загальний напрям якого розташовується по суті в площині, яка сама, в свою чергу, містить подовжній напрям XX, і на ділянках стінки, що представляють попарно вибрані міри перекриття, наприклад, 50 %, і/або що частина контролю буде здійснена за допомогою послідовних пучків, загальні напрями яких розташовуються по суті в площинах, які утворюють гострі кути з цим подовжнім напрямом XX і які перетинаються між 0° і +20° і між 0° і -20°. У той же час, кут нахилу елементів детектування зонда SU може бути вибраний в залежності від конкретних потреб. Як що не є обмежувальним прикладу може бути вибраний кут 45° по відношенню до подовжнього напряму XX. Тут також потрібно зазначити, що, як це відоме фахівцеві в даній галузі техніки, коефіцієнт посилення кожного перетворювача повинен бути об'єктом регулювання під час фази калібрування, наприклад, для того, щоб амплітуда одержаного сигналу на першому 11 UA 98964 C2 5 10 15 20 25 30 35 40 45 50 55 60 відображеному сигналі, що поступає від поверхні розділу стінки РА, відповідала амплітуді, що складає, наприклад, порядку 50 % від загальної динаміки амплітуди, що використовується для карт. У той же час, фаза калібрування переважним чином містить також першу частину, призначену для одержання згаданих вище еталонних карт, які представляють результати ультразвукових аналізів, виконаних на еталонній трубчастій колісній осі того ж типу, що і колісна вісь, яка повинна стати об'єктом контролю, але в хорошому стані (тобто позбавленої нестач і дефектів). Ця перша частина фази калібрування по суті дозволяє попередньо мати уявлення про відображені сигнали, які породжуються геометричними параметрами стінки РА (зокрема, її кутами і, кажучи в більш загальному значенні, тими її зонами, в яких її внутрішній радіус R2 або її зовнішній радіус R1 змінюються істотним чином) і, таким чином, диференціювати їх від тих відображених сигналів, які породжуються структурними недоліками або дефектами в підлягаючих контролю трубчастих колісних осях АЕ. Крім того, фаза калібрування також може містити другу частину, призначену для одержання згаданих вище еталонних карт, які представляють результати ультразвукових аналізів, виконаних на еталонній трубчастій колісній осі того ж типу, що колісна вісь, яка повинна стати об'єктом контролю, але при цьому згадана еталонна колісна вісь містить характерні структурні або штучні дефекти (такі, наприклад, як характерні виїмки або порожнини), що визначаються у вибраних місцях. Ці характерні структурні або штучні дефекти визначаються відповідно до технічних вимог і/або нормативних документів, які фіксують сортуючий поріг між недоліками і дефектами. У тому випадку, коли амплітуда сигналу, що відбувається від відображеного сигналу від природних дефектів, виявляється меншою, ніж згаданий сортуючий поріг, вважається, що має місце недолік. У іншому випадку (вище за поріг) вважається, що має місце дефект. Ця друга частина фази калібрування по суті дозволяє попередньо мати уявлення про відображені сигнали, які викликаються характерними структурними або штучними дефектами, і дає, таким чином, можливість більш легко виявляти в картах, шляхом порівняння з сортуючим порогом, "об'єкти", які викликають відображені сигнали (або сигнатури) подібних типів в підлягаючих контролю трубчастих колісних осях АЕ. Після того, як завершений подовжній і/або поперечний ультразвуковий аналіз трубчастої колісної осі АЕ, є можливість виконати щонайменше один аналіз іншого типу. Наприклад, можна виконати аналіз зовнішньої поверхні SE стінки РА для того, щоб одержати дані аналізу поверхні для різних відносних положень осі АЕ по відношенню до засобів аналізу поверхні. Серед технологій аналізу поверхні, які можуть бути використані в цьому випадку, можна згадати, зокрема, так звану технологію потоку витоку і так звану технологію з використанням струмів Фуко. Деякі з цих технологій є переважними внаслідок того, що вони дозволяють одержати дані аналізу поверхні, на основі яких можна сформувати карти, характерні для положень і орієнтацій дефектів поверхні стінки РА. Файли даних, створюючі ці карти дефектів поверхні, переважним чином зберігаються в запам'ятовуючому пристрої МУ для того, щоб згадані карти дефектів поверхні могли бути відображені індивідуальним чином (тобто одні за іншими) або згрупованим чином (декілька карт одночасно), у випадку необхідності, з картами структурних дефектів (одержаних ультразвуковими методами), на екрані EC з метою аналізу фахівцем і/або зіставлення з картами, одержаними з використанням зондів SU. Це також може забезпечити можливість автоматичного порівняння за допомогою даного пристрою карт дефектів поверхні і карт, одержаних ультразвуковими методами. Тут потрібно зазначити, що можна також виконати аналіз поверхні з використанням технології типу МРІ ("Magnetic Particle Inspection", тобто контроль з використанням намагнічених часток). При цьому потрібно нагадати, що ця технологія складається в покритті зовнішньої поверхні SE стінки РА магнітними частками і індикатором, з подальшим намагніченням підлягаючої контролю стінки і спостереженням після цього візуально (тобто неозброєним оком) під ультрафіолетовим світлом нерівномірності орієнтації цих магнітних часток, тобто нерівномірності орієнтації, пов'язаної з наявністю дефектів або недоліків. Недолік цієї технології аналізу поверхні полягає в тому, що вона не дозволяє в цей час забезпечити одержання карт дефектів поверхні і, відповідно, в тому, що ця технологія засновується виключно на результатах візуального спостереження фахівцем, що здійснює контроль осі АЕ, і вимагає потім візуального, а не автоматичного порівняння з картами, одержаними за допомогою ультразвукових методів. Таким чином, цей метод залежить від інтерпретації оператора і пов'язаної з цією обставиною випадковості. Тут також потрібно зазначити, що всі карти, про які йшла мова в попередньому викладі, можуть являти собою карти, відомі фахівцеві в даній галузі техніки, зокрема, карти типу A-Scan, B-Scan, C-Scan, D-Scan, S-Scan (або Sector Scan). Як виключно ілюстративний приклад можна, 12 UA 98964 C2 5 10 15 наприклад, сформувати карти типу C-Scan (які забезпечують представлення локалізації недоліку по відношенню до геометрії даної деталі), а також, у випадку необхідності, карти типу S-Scan (які забезпечують одержання свідчення локалізації в певному об'ємі в фіксованому положенні зонда). Завдяки винаходу, що пропонується, є можливість виявляти недоліки і дефекти приблизно 2 мм в товщину (тобто приблизно 5 % від номінальної товщини стінки РА в радіальному напрямі), приблизно 5 мм в довжину, і 1 мм завширшки. У той же час, тут можуть бути виявлені подовжні і поперечні недоліки і дефекти, що представляють нахил на гострі кути, звичайне (25°), і переважно менше (за 5°). Крім того, можуть бути виявлені подовжні або поперечні порожнини (або "flaws"), що представляють кути дезорієнтації (або "tilt angles"), які можуть дійти приблизно до 60°. Винахід, що пропонується, не обмежується описаними в попередньому викладі прикладами способу і пристрою контролю трубчастих колісних осей, описаного тут тільки як приклад, але воно охоплює всі варіанти, які можуть бути розглянуті фахівцем в даній галузі техніки в рамках наведеної нижче формули винаходу, що пропонується. ФОРМУЛА ВИНАХОДУ 20 25 30 35 40 45 50 55 60 1. Спосіб контролю колісних осей за допомогою ультразвукового(их) зонда(ів), який відрізняється тим, що цей спосіб включає наступні етапи, на яких: a) розміщують на контрольному стенді (ВС) трубчасту колісну вісь (АЕ), що містить стінку (РА), яка має профілі із змінними і відомими зовнішнім і внутрішнім радіусами; b) розміщують щонайменше один ультразвуковий зонд (SU) на зовнішній (SE) або на внутрішній (SI) поверхні згаданої стінки (РА) в першому місці, яке вибирається в залежності від її профілів і можливого загромадження осі (АЕ), потім аналізують з використанням кожного зонда (SU) першу вибрану ділянку згаданої стінки (РА) в першому вибраному кутовому секторі, орієнтованому вздовж першого подовжнього або поперечного напряму, таким чином, щоб одержати дані аналізу для різних відносних кутових положень осі (АЕ) відносно зонда (SU); c) знов розміщують щонайменше один зонд (SU) в щонайменше одному другому місці, яке вибирається в залежності від профілів стінки (РА) і можливого загромадження осі (АЕ), аналізують з використанням кожного зонда (SU) другу вибрану ділянку згаданої стінки (РА) у другому вибраному кутовому секторі, орієнтованому вздовж другого напряму, протилежного згаданому першому напряму, таким чином, щоб одержати інші дані аналізу для різних відносних кутових положень згаданої осі (АЕ) відносно зонда (SU; d) формують, на основі згаданих одержаних даних аналізу, карти, характерні для поперечних або подовжніх орієнтацій і положень показань відбитих сигналів всередині згаданої стінки (РА). 2. Спосіб за п. 1, який відрізняється тим, що здійснюють перший раз етапи з b) пo d), розміщуючи кожний ультразвуковий зонд (SU) на зовнішній поверхні (SE) стінки (РА) для того, щоб сформувати карти, характерні для положень і орієнтацій показань відображених сигналів всередині згаданої стінки (РА), після чого здійснюють другий раз щонайменше етапи b) і d), розміщуючи щонайменше один ультразвуковий зонд (SU) на внутрішній поверхні (SI) стінки (РА) в щонайменше одному третьому місці, яке вибирається в залежності від її профілів, а потім аналізують, з використанням кожного зонда (SU), третю вибрану ділянку стінки (РА) в третьому вибраному кутовому секторі, орієнтованому вздовж щонайменше одного вибраного подовжнього або поперечного напряму, таким чином, щоб одержати дані аналізу для різних відносних кутових положень осі (АЕ) відносно зонда (SU) і сформувати карти, характерні для положень і орієнтацій показань відбитих сигналів всередині стінки (РА). 3. Спосіб за одним з пунктів 1 і 2, який відрізняється тим, що здійснюють етапи з b) пo d) щонайменше один раз, розміщуючи кожний ультразвуковий зонд (SU) на зовнішній (SE) або внутрішній (SI) поверхні стінки (РА) таким чином, щоб виконати ультразвуковий аналіз в кутовому секторі, орієнтованому вздовж подовжнього напряму, і сформувати таким чином карти, характерні для поперечних орієнтацій і положень показань відображених сигналів всередині стінки (РА), після чого знову здійснюють етапи з b) пo d) ще щонайменше один раз, розміщуючи щонайменше один ультразвуковий зонд (SU) на зовнішній (SE) або на внутрішній (SI) поверхні стінки (РА) таким чином, щоб виконати ультразвуковий аналіз в кутовому секторі, орієнтованому вздовж поперечного напряму, і сформувати таким чином карти, характерні для подовжніх орієнтацій і положень показань відбитих сигналів всередині стінки (РА). 4. Спосіб за одним з пунктів з 1 по 3, який відрізняється тим, що після здійснення етапу d) передбачають етап e), на якому здійснюють аналіз щонайменше зовнішньої поверхні (SE) стінки (РА) за допомогою іншої технології аналізу, відмінної від технології, основаної на ультразвуку, 13 UA 98964 C2 5 10 15 20 25 30 35 40 45 50 55 60 таким чином, щоб одержати дані аналізу для різних відносних кутових положень осі (АЕ) відносно зонда (SU). 5. Спосіб за п. 4, який відрізняється тим, що після здійснення етапу e) здійснюють етап f), на якому на основі цих одержаних даних аналізу формують карти, характерні для положень і орієнтацій показань поверхні стінки (РА). 6. Спосіб за одним з пунктів 4 і 5, який відрізняється тим, що згадану іншу технологію аналізу вибирають в групі, що містить так звану технологію потоку витоку і так звану технологію з використанням струмів Фуко. 7. Спосіб за одним з пунктів з 1 по 6, який відрізняється тим, що аналізують кожну з перших, других і можливих третіх ділянок згаданої стінки за допомогою подовжнього відносного переміщення щонайменше одного зонда (SU) відносно осі (АЕ) і/або за допомогою електронного сканування з використанням щонайменше одного зонда (SU). 8. Спосіб за одним з пунктів з 1 по 7, який відрізняється тим, що на одному щонайменше із згаданих етапів b), с) і e) одержують різні відносні кутові положення осі (АЕ) відносно зонда (SU), приводячи у обертання згадану вісь (АЕ) відносно зонда (SU). 9. Спосіб за одним з пунктів з 1 по 8, який відрізняється тим, що на одному щонайменше із згаданих етапів b), с) і e) одержують різні відносні кутові положення осі (АЕ) відносно зонда (SU), приводячи у обертання щонайменше один зонд (SU) відносно осі (АЕ). 10. Спосіб за одним з пунктів з 1 по 9, який відрізняється тим, що він включає етап g), на якому порівнюють дані з карт, одержаних в процесі етапу d), з даними з перших еталонних карт, одержаних на першій еталонній осі того ж типу, що і контрольована вісь, але позбавленій дефектів, таким чином, щоб запам'ятовувати тільки ті дані, які характерні для показань відбитих сигналів, не присутніх в згаданих перших еталонних картах, і сформувати, таким чином, "скореговані" карти. 11. Спосіб за одним з пунктів з 1 по 10, який відрізняється тим, що він включає етап h), на якому порівнюють дані з карт, одержаних в процесі етапу d) або g), з даними з других еталонних карт, одержаних на другій еталонній осі того ж типу, що і контрольована вісь, але яка містить відомі дефекти, таким чином, щоб запам'ятати тільки ті дані, які характерні для показань відбитих сигналів, характерних для згаданих відомих дефектів, присутніх в згаданих других еталонних картах, і сформувати, таким чином, карти дефектів. 12. Спосіб за одним з пунктів з 1 по 11, який відрізняється тим, що він включає етап і), на якому порівнюють амплітуди даних з карт, одержаних в процесі етапу d) або g), з вибраною пороговою амплітудою для того, щоб запам'ятати тільки ті дані, які характерні для показань відбитих сигналів, амплітуди яких перевищують згадану порогову амплітуду і сигналізують про наявність дефектів, і сформувати, таким чином, карти дефектів. 13. Спосіб за п. 12, який відрізняється тим, що у випадку виявлення амплітуди, що перевищує згадану порогову амплітуду, генерують попереджувальний сигнал. 14. Спосіб за одним з пунктів з 1 по 13, який відрізняється тим, що він включає етап j), на якому відображають щонайменше одну карту на екрані (EC). 15. Спосіб за одним з пунктів з 1 по 14, який відрізняється тим, що використовують зонди (SU), здатні випромінювати ультразвук вздовж одного єдиного напряму із змінним кутом. 16. Спосіб за п. 15, який відрізняється тим, що згаданий кут змінюється між приблизно 0° і приблизно 70° відносно подовжнього або поперечного напряму. 17. Спосіб за одним з пунктів з 1 по 14, який відрізняється тим, що використовують зонди (SU) з так званою фазованою решіткою, здатні випромінювати ультразвук вздовж напрямів, що знаходяться у вибраному кутовому секторі. 18. Спосіб за п. 15, який відрізняється тим, що згаданий кутовий сектор знаходиться між приблизно 0° і приблизно 70° відносно подовжнього або поперечного напряму. 19. Пристрій контролю колісних осей, який відрізняється тим, що він має в своєму складі: і) контрольний стенд (ВС), виконаний з можливістю прийому трубчастої осі (АЕ), що містить стінку (РА), яка має профілі із змінними і відомими зовнішнім і внутрішнім радіусами, іі) щонайменше один ультразвуковий зонд (SU), виконаний з можливістю аналізу щонайменше однієї вибраної ділянки згаданої стінки (РА) у вибраному кутовому секторі і одержання, таким чином, даних аналізу, ііі) засоби контролю (МС), виконані з можливістю керування контрольним стендом (ВС) таким чином, щоб розміщувати кожний зонд (SU) на зовнішній (SE) або на внутрішній (SI) поверхні стінки (РА) в першому місці, яке вибирається в залежності від профілів цієї стінки і можливого загромадження згаданої осі, таким чином, щоб він аналізував щонайменше одну першу і щонайменше одну другу вибрані ділянки згаданої стінки (РА) відповідно в щонайменше одному першому і в щонайменше одному другому вибраних кутових секторах, орієнтованих вздовж першого і другого подовжніх або поперечних протилежних напрямів, і щоб він 14 UA 98964 C2 5 10 15 20 25 30 35 40 45 50 55 60 одержував, таким чином, дані аналізу для різних відносних кутових положень осі (АЕ) відносно зонда (SU), iv) засоби (МТ) обробки, виконані з можливістю формування, на основі згаданих одержаних даних аналізу, карт, що є репрезентативними для поперечних або подовжніх орієнтацій і положень показань відбитих сигналів всередині стінки (РА). 20. Пристрій за п. 19, який відрізняється тим, що згадані засоби (МС) контролю виконані з можливістю контролю, перший раз, відносного переміщення щонайменше одного зонда (SU) відносно зовнішньої поверхні (SE) стінки (РА) таким чином, щоб він одержував дані аналізу для різних відносних кутових положень згаданої осі (АЕ) відносно нього (SU), з подальшим контролем, другий раз, відносного переміщення щонайменше одного зонда (SU) відносно внутрішньої поверхні (SI) стінки (РА) таким чином, щоб він аналізував щонайменше одну третю вибрану ділянку стінки (РА) в щонайменше одному третьому вибраному кутовому секторі, орієнтованому вздовж вибраного подовжнього або поперечного напряму, і щоб одержував, таким чином, інші дані аналізу для різних відносних кутових положень згаданої осі (АЕ) відносно нього (SU), а також тим, що згадані засоби (МТ) обробки виконані з можливістю формування, на основі одержаних даних аналізу, карт, характерних для положень і орієнтацій показань відбитих сигналів всередині стінки (РА). 21. Пристрій за одним з пунктів 19 і 20, який відрізняється тим, що згадані засоби (МС) контролю виконані з можливістю: і) контролю, щонайменше перший раз, відносного переміщення щонайменше одного зонда (SU) відносно зовнішньої (SE) або внутрішньої (SI) поверхні стінки (РА) таким чином, щоб він здійснював ультразвуковий аналіз в кутовому секторі, орієнтованому вздовж подовжнього напряму, і щоб він одержував дані аналізу, на основі яких засоби (МТ) обробки сформують карти, характерні для поперечних орієнтацій і положень показань відображених сигналів, потім іі) контролю, щонайменше другий раз, відносного переміщення щонайменше одного зонда (SU) відносно зовнішньої (SE) або внутрішньої (SI) поверхні стінки (РА) таким чином, щоб він здійснював ультразвуковий аналіз в кутовому секторі, орієнтованому вздовж поперечного напряму, і щоб він одержував дані аналізу, на основі яких засоби (МТ) обробки сформують карти, характерні для подовжніх орієнтацій і положень показань відбитих сигналів. 22. Пристрій за одним з пунктів з 19 по 21, який відрізняється тим, що він має в своєму складі засоби аналізу поверхні, виконані з можливістю аналізу щонайменше зовнішньої поверхні (SE) стінки (РА) за допомогою іншої технології аналізу, відмінної від технології, основаної на ультразвуку, таким чином, щоб одержати дані аналізу для різних відносних положень осі (АЕ) відносно зонда (SU). 23. Пристрій за п. 22, який відрізняється тим, що згадані засоби (МТ) обробки виконані з можливістю формування, на основі цих даних аналізу, одержаних за допомогою згаданих засобів аналізу поверхні (MAS) карт, характерних для положень і орієнтацій показань поверхні стінки (РА). 24. Пристрій за одним з пунктів 22 і 23, який відрізняється тим, що згадані засоби аналізу поверхні вибираються в групі, що містить засоби аналізу потоку витоку і засоби аналізу за допомогою струмів Фуко. 25. Пристрій за одним з пунктів з 19 по 24, який відрізняється тим, що він має в своєму складі засоби (MD) переміщення, виконані з можливістю забезпечення відносного переміщення в подовжньому напрямі щонайменше одного зонда (SU) відносно осі (АЕ), і тим, що згадані засоби (МС) контролю виконані з можливістю контролю згаданих засобів (MD) переміщення так, щоб вони переміщували подовжньо і відносно щонайменше один зонд (SU) відносно осі (АЕ) для того, щоб він аналізував частину щонайменше згаданих перших, других і можливих третіх ділянок стінки (РА). 26. Пристрій за одним з пунктів з 19 по 25, який відрізняється тим, що згадані засоби (МС) контролю виконані з можливістю здійснення електронного сканування з використанням щонайменше одного зонда (SU) для того, щоб він аналізував частину щонайменше згаданих перших, других і можливих третіх ділянок стінки (РА). 27. Пристрій за одним з пунктів з 19 по 26, який відрізняється тим, що згаданий стенд (ВС) виконаний з можливістю приведення у обертання осі (АЕ) відносно кожного зонда (SU) таким чином, щоб визначити різні відносні кутові положення цієї осі (АЕ) відносно кожного зонда (SU). 28. Пристрій за одним з пунктів з 19 по 27, який відрізняється тим, що згаданий стенд (ВС) виконаний з можливістю приведення у обертання щонайменше одного зонда (SU) відносно осі (АЕ) таким чином, щоб визначити різні відносні кутові положення згаданої осі (АЕ) відносно зонда (SU). 29. Пристрій за одним з пунктів з 19 по 28, який відрізняється тим, що згадані засоби (МТ) обробки виконані з можливістю порівняння даних з карт, одержаних на підлягаючій контролю осі 15 UA 98964 C2 5 10 15 20 25 30 (АЕ), з даними з перших еталонних карт, одержаних на першій еталонній осі того ж типу, що і контрольована вісь, але позбавленій дефектів, і запам'ятовування тільки тих даних, які є характерними для показань відбитих сигналів, які не присутні в перших еталонних картах, і формування, таким чином, скорегованих карт. 30. Пристрій за одним з пунктів з 19 по 29, який відрізняється тим, що згадані засоби (МТ) обробки виконані з можливістю порівняння даних з карт, одержаних на підлягаючій контролю осі (АЕ), з даними з других еталонних карт, одержаних на другій еталонній осі того ж типу, що і контрольована вісь, але яка містить відомі дефекти, і запам'ятовування тільки даних, характерних для показань відбитих сигналів, характерних для відомих дефектів, присутніх в згаданих других еталонних картах, і формування, таким чином, карт дефектів. 31. Пристрій за одним з пунктів з 19 по 30, який відрізняється тим, що згадані засоби (МТ) обробки виконані з можливістю порівняння амплітуд даних з карт, одержаних на підлягаючій контролю осі (АЕ), з вибраною пороговою амплітудою, і запам'ятовування тільки даних, характерних для показань відбитих сигналів, амплітуди яких перевищують цю порогову амплітуду і сигналізують про наявність дефектів, і формування, таким чином, карт дефектів. 32. Пристрій за п. 31, який відрізняється тим, що згадані засоби (МТ) обробки виконані з можливістю генерування попереджувального сигналу у випадку виявлення амплітуди, що перевищує згадану порогову амплітуду. 33. Пристрій за одним з пунктів з 19 по 32, який відрізняється тим, що він має в своєму складі екран (EC), здатний відображати щонайменше деякі з карт, сформованих засобами (МТ) обробки. 34. Пристрій за одним з пунктів з 19 по 33, який відрізняється тим, що згадані зонди (SU) здатні випромінювати ультразвук вздовж одного єдиного напряму із змінним кутом. 35. Пристрій за п. 34, який відрізняється тим, що згаданий кут змінюється між 0° і приблизно 70°, відносно подовжнього або поперечного напряму. 36. Пристрій за одним з пунктів з 19 по 33, який відрізняється тим, що згадані зонди (SU) являють собою так звані зонди з фазованою решіткою і здатні випромінювати ультразвук вздовж напрямів, що знаходяться у вибраному кутовому секторі. 37. Пристрій за п. 36, який відрізняється тим, що згаданий кутовий сектор знаходиться між приблизно 0° і приблизно 70° відносно подовжнього або поперечного напряму. 16 UA 98964 C2 17 UA 98964 C2 18 UA 98964 C2 Комп’ютерна верстка А. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 19
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and apparatus for automatic non-destructive testing of tubular axle shafts with variable internal and external radius profiles
Автори англійськоюLesage, Frederic, Noel, Alexandre, Nogueira de Paula, Renato
Назва патенту російськоюСпособ и устройство для автоматического неразрушающего контроля трубчатых колесных осей с профилями с переменными внутренним и внешним радиусами
Автори російськоюЛезаж Фредерик, Ноэль Александр, Ногейра де Паула Ренато
МПК / Мітки
МПК: G01N 29/26, G01N 29/22, G01N 29/00, G01N 29/06, G01S 15/00, G01M 17/00
Мітки: неруйнуючого, профілями, внутрішнім, зовнішнім, радіусами, колісних, пристрій, контролю, трубчастих, змінними, осей, автоматичного, спосіб
Код посилання
<a href="https://ua.patents.su/21-98964-sposib-i-pristrijj-dlya-avtomatichnogo-nerujjnuyuchogo-kontrolyu-trubchastikh-kolisnikh-osejj-z-profilyami-z-zminnimi-vnutrishnim-i-zovnishnim-radiusami.html" target="_blank" rel="follow" title="База патентів України">Спосіб і пристрій для автоматичного неруйнуючого контролю трубчастих колісних осей з профілями з змінними внутрішнім і зовнішнім радіусами</a>
Спосіб контролю осей колісних пар на ходу потяга

Номер патенту: 19306
Опубліковано: 15.12.2006
Автори: Войтенко Галина Олегівна, Осенін Юрій Іванович
МПК: B61K 9/00
Мітки: потяга, ходу, пар, колісних, спосіб, контролю, осей
Формула / Реферат:
Спосіб контролю осей колісних пар на ходу потяга, відповідно до якого в осі колісної пари збуджують ультразвукові коливання у вигляді поверхневих акустичних хвиль Релея, приймають віддзеркалені від дефектів сигнали і визначають їх величину за результатами порівняння амплітуд віддзеркалених сигналів з еталонним значенням та виявляють місцезнаходження дефекту за часом запізнювання віддзеркалених хвиль, який відрізняється тим, що поверхневим...
Пристрій для автоматичного контролю технічного стану колісних пар рухомого складу

Номер патенту: 13088
Опубліковано: 15.03.2006
Автори: Войтенко Галина Олегівна, Осенін Юрій Іванович
МПК: B61K 9/00
Мітки: автоматичного, контролю, складу, стану, колісних, пар, пристрій, технічного, рухомого
Формула / Реферат:
Пристрій для автоматичного контролю технічного стану колісних пар рухомого складу, що містить генератор потужних імпульсів, з'єднаний з випромінювачем, ключ, приймач, генератор опорної частоти, підсилювач, синхронізатор, вихід якого підключений до входів тригера й лічильника імпульсів, формувач імпульсів, вихід якого з'єднаний із входом тригера, оснащений попереднім підсилювачем, до входу якого підключений приймач, а вихід з'єднаний через...
Спосіб автоматичного контролю технічного стану колісних пар рухомого складу
Номер патенту: 13087
Опубліковано: 15.03.2006
Автори: Осенін Юрій Іванович, Войтенко Галина Олегівна
МПК: B61K 9/00
Мітки: технічного, складу, контролю, рухомого, пар, автоматичного, стану, колісних, спосіб
Формула / Реферат:
Спосіб автоматичного контролю технічного стану колісних пар рухомого складу, згідно з яким в контрольованому виробі, під кутом до його поверхні, збуджують ультразвукові коливання у вигляді нормальних хвиль асиметричної нульової моди за критичним кутом падіння Релея, приймають віддзеркалені від зерен метала та дефектів сигнали і визначають їх величину за результатами порівняння амплітуд віддзеркалених сигналів з еталонним значенням, збуджують...
Пристрій для виготовлення прецизійних трубчастих виробів з внутрішнім профілем
Номер патенту: 55115
Опубліковано: 10.12.2010
Автори: Стеблюк Володимир Іванович, Шкарлута Дмитро Борисович, Розов Юрій Георгійович, Карагодін Денис Олександрович
МПК: B21D 37/20
Мітки: виробів, внутрішнім, виготовлення, прецизійних, профілем, пристрій, трубчастих
Формула / Реферат:
Пристрій для виготовлення прецизійних трубчастих виробів з внутрішнім профілем, що містить корпус, напрямну втулку, рухому матрицю з робочою кромкою у вигляді гвинтової лінії перемінної висоти, який відрізняється тим, що в корпусі жорстко закріплена втулка, наприклад, за допомогою гвинтів, в якій встановлена матриця з гвинтовою робочою кромкою перемінної висоти, яка жорстко закріплена щонайменше двома фіксуючими елементами, а напрямна втулка...
Дозуючий клапан з нерухомим внутрішнім каналом і рухомим зовнішнім патрубком, пристрій і установка, що його містять
Номер патенту: 91075
Опубліковано: 25.06.2010
Автор: Бломм Карел
МПК: F16K 21/00, G01F 5/00, B67D 3/00, B65B 3/00, F16K 1/00, F16K 35/00, G01F 11/00
Мітки: містять, патрубком, установка, каналом, дозуючий, рухомим, клапан, внутрішнім, пристрій, зовнішнім, нерухомим
Формула / Реферат:
1. Клапан (1) для дозування рідкого або порошкоподібного продукту, що містить:нерухомий канал (5) для подачі продукту, що має верхній кінець (6), виконаний у формі наконечника для його з'єднання з трубкою (7) для подачі продукту, і нижній кінець (11) для дозованої роздачі продукту, причому цей канал (5) на його нижньому кінці (11) обмежує отвір (12) для пропускання продукту;закриваючий елемент (13), розташований на нижньому...
Попередній патент: Карбонат кальцію з модифікованою поверхнею в комбінації з гідрофобним адсорбентом для очистки води
Наступний патент: Спосіб одержання похідних 5-галоалкіл-4,5-дигідроізоксазолу
Випадковий патент: Нарізне з'єднання