Спосіб стабілізації радіального положення осі обертання вала аеростатичної шпиндельної опори
Номер патенту: 69126
Опубліковано: 16.08.2004
Автори: Тарасов Віктор Олексійович, Зіненко Володимир Миколайович



Формула / Реферат
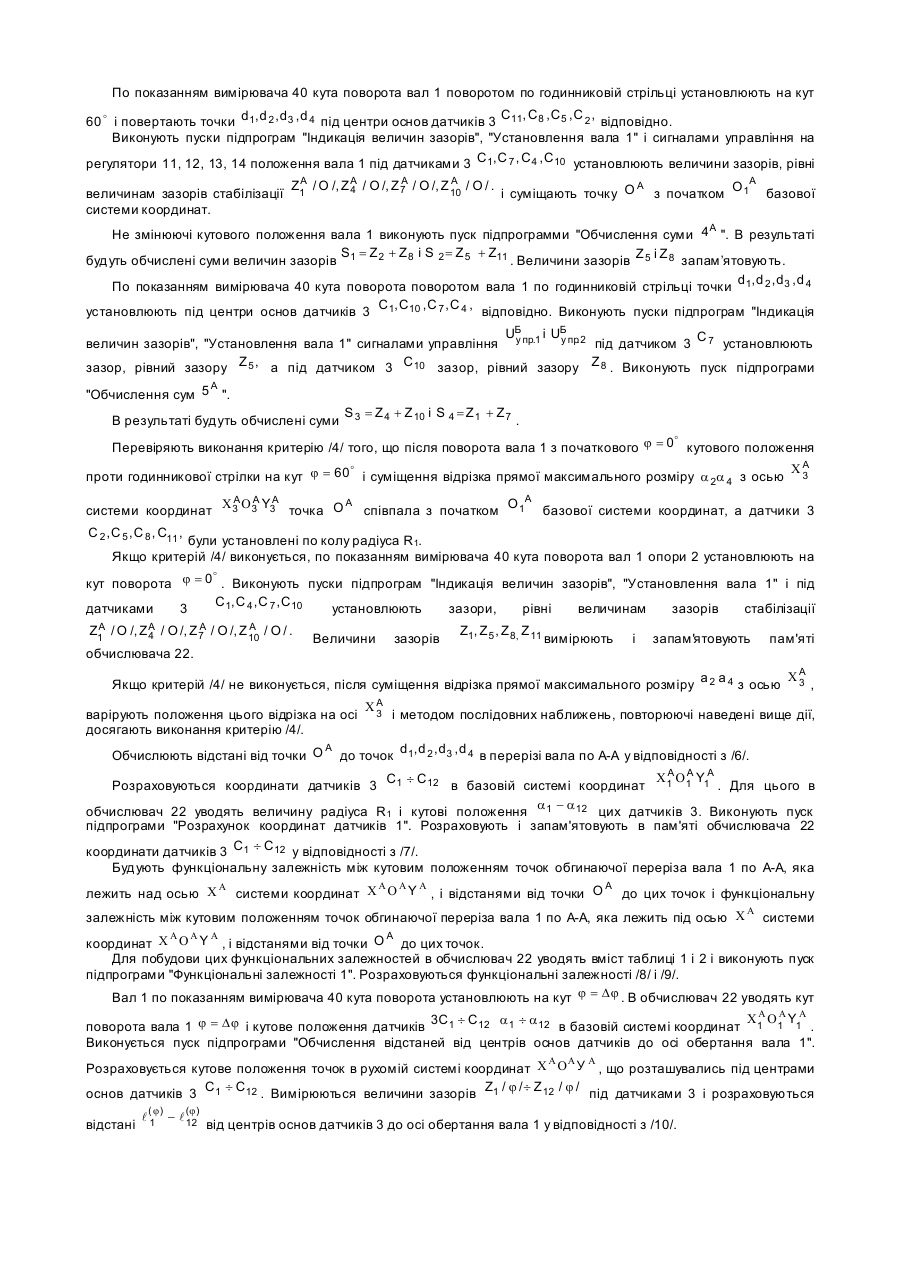
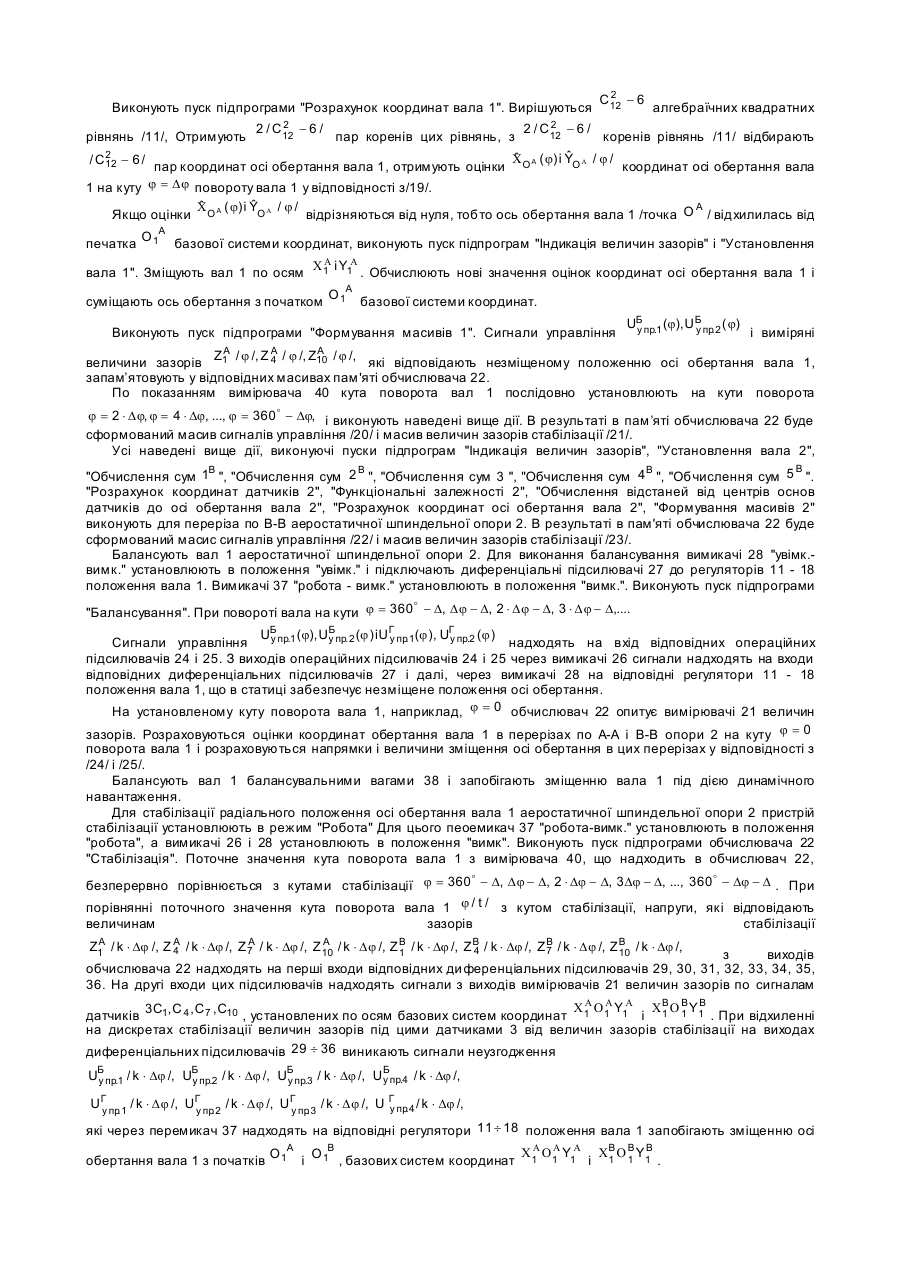
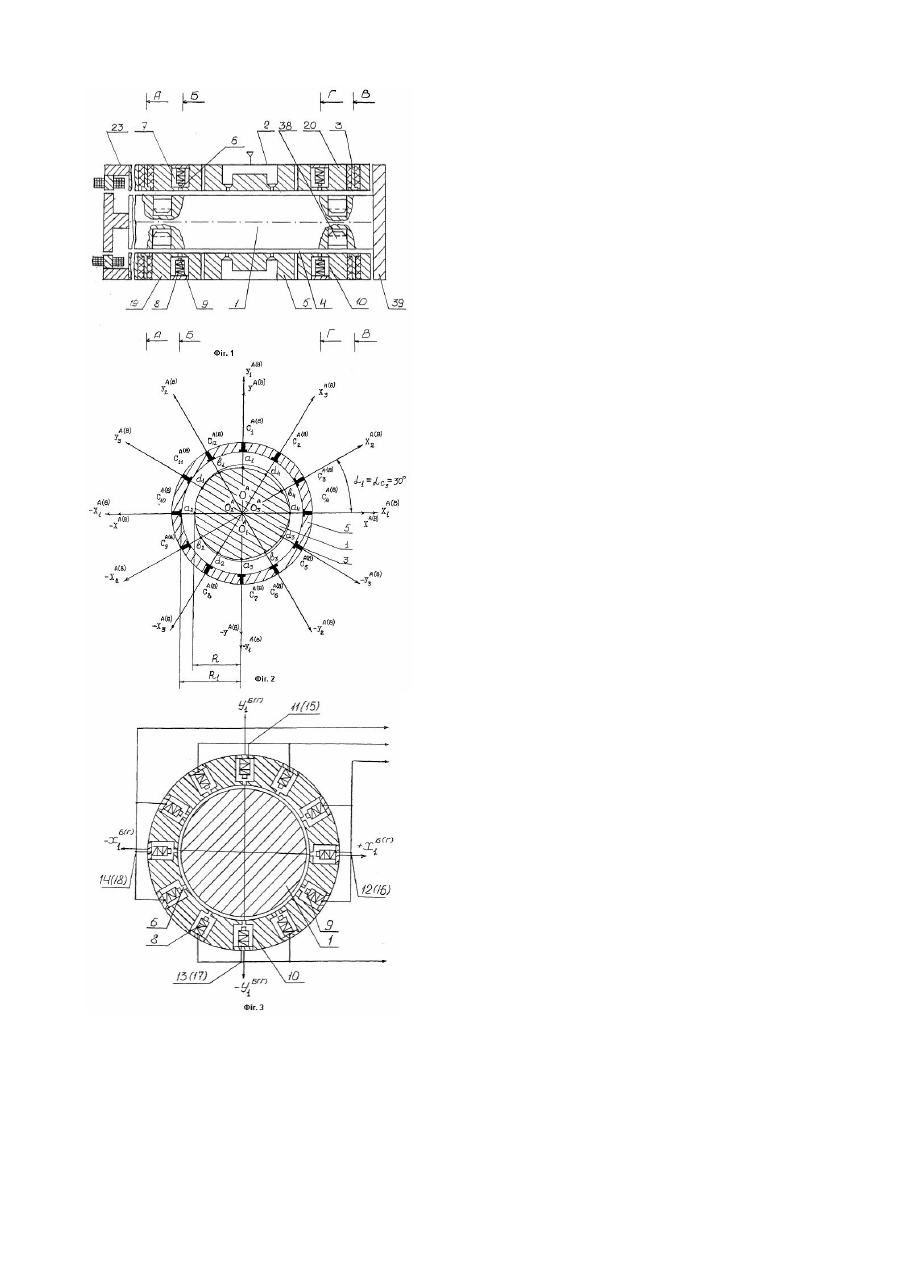
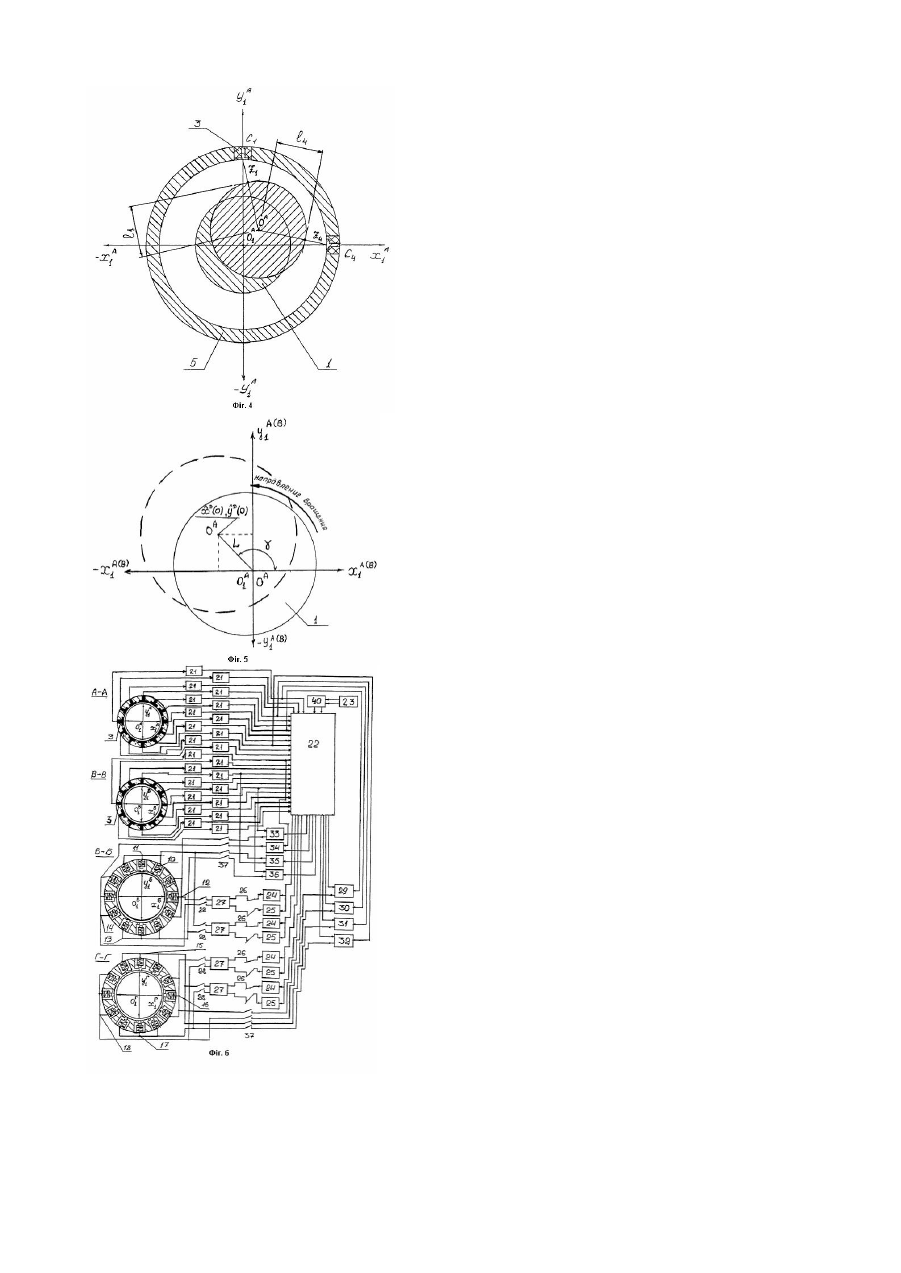
Спосіб стабілізації радіального положення осі обертання вала аеростатичної шпиндельної опори, який включає апроксимацію еліпсами обвідних перерізів вала аеростатичної шпиндельної опори площинами установки датчиків величин зазорів, розрахунок координат датчиків величин зазорів, установлених по осях систем координат з суміщеними початками, які лежать в площинах установки датчиків величин зазорів, розрахунок і оцінку координат осі обертання вала аеростатичної шпиндельної опори, а також вибір її незміщеного положення, формування масивів величин зазорів стабілізації під датчиками величин зазорів, установлених по осях базових систем координат, формування сигналів управління на регулятори положення вала аеростатичної шпиндельної опори, який відрізняється тим, що на обвідний перерізу вала аеростатичної шпиндельної опори по А-А площиною установки датчиків величин зазорів визначають точки максимального розміру цього перерізу, відрізок прямої максимального розміру перерізу вала, яка з'єднує точки максимального розміру переріза вала, суміщають з віссю ![]() базової системи координат
базової системи координат ![]() кут повороту вала, на якому відрізок прямої максимального розміру перерізу вала був суміщений з віссю
кут повороту вала, на якому відрізок прямої максимального розміру перерізу вала був суміщений з віссю ![]() , приймають за нульовий кут повороту вала, точку
, приймають за нульовий кут повороту вала, точку ![]() перерізу вала по А-А площиною установки датчиків, яка лежить на відрізку прямої максимального розміру перерізу вала при суміщеному положенні цієї прямої з віссю
перерізу вала по А-А площиною установки датчиків, яка лежить на відрізку прямої максимального розміру перерізу вала при суміщеному положенні цієї прямої з віссю ![]() базової системи координат і співпадає з початком
базової системи координат і співпадає з початком ![]() базової системи координат, приймають за точку осі обертання вала, а положення осі обертання вала, при якому вона проходить через початок
базової системи координат, приймають за точку осі обертання вала, а положення осі обертання вала, при якому вона проходить через початок ![]() базової системи координат, приймають за її незміщене положення, радіус кола з центром в точці
базової системи координат, приймають за її незміщене положення, радіус кола з центром в точці ![]() і яке проходить через одну з точок максимального розміру перерізу вала приймають рівним розрахунковій величині радіуса
і яке проходить через одну з точок максимального розміру перерізу вала приймають рівним розрахунковій величині радіуса ![]() вала аеростатичної шпиндельної опори, послідовно основи кожної з чотирьох датчиків величин зазорів, установлених по осях кожної системи координат в перерізі вала по А-А площиною установки датчиків, установлюють по колу радіуса
вала аеростатичної шпиндельної опори, послідовно основи кожної з чотирьох датчиків величин зазорів, установлених по осях кожної системи координат в перерізі вала по А-А площиною установки датчиків, установлюють по колу радіуса ![]() який більший радіуса
який більший радіуса ![]() на величину розрахункового зазору аеростатичної шпиндельної опори, і визначають відстані від точки
на величину розрахункового зазору аеростатичної шпиндельної опори, і визначають відстані від точки ![]() до точок обвідної перерізу вала, розташованих на куті
до точок обвідної перерізу вала, розташованих на куті ![]() повороту вала під центрами основ датчиків величин зазорів, координати датчиків величин зазорів, установлених в перерізі вала по А-А по осях "к" систем координат, перераховують в координати базової системи координат
повороту вала під центрами основ датчиків величин зазорів, координати датчиків величин зазорів, установлених в перерізі вала по А-А по осях "к" систем координат, перераховують в координати базової системи координат ![]() в цьому же перерізі вала уводять зв'язану з валом систему координат
в цьому же перерізі вала уводять зв'язану з валом систему координат ![]() початок якої сумішають з точкою
початок якої сумішають з точкою ![]() перерізу вала, а її осі координат на куті
перерізу вала, а її осі координат на куті ![]() повороту вала суміщають з одноіменними осями базової системи координат
повороту вала суміщають з одноіменними осями базової системи координат ![]() будують функціональну залежність у вигляді полінома n-го ступеня між кутовим положенням точок частини обвідної перерізу вала, розташованих під центрами основ датчиків величин зазорів на куті
будують функціональну залежність у вигляді полінома n-го ступеня між кутовим положенням точок частини обвідної перерізу вала, розташованих під центрами основ датчиків величин зазорів на куті ![]() повороту вала, яка лежить над віссю
повороту вала, яка лежить над віссю ![]() системи координат
системи координат ![]() і відстанями від точки
і відстанями від точки ![]() до цих точок і функціональну залежність у вигляді полінома n-го ступеня між кутовим положенням точок частини обвідної перерізу вала, розташованих під центрами основ датчиків величин зазорів на куті
до цих точок і функціональну залежність у вигляді полінома n-го ступеня між кутовим положенням точок частини обвідної перерізу вала, розташованих під центрами основ датчиків величин зазорів на куті ![]() повороту вала, яка лежить під віссю
повороту вала, яка лежить під віссю ![]() системи координат
системи координат ![]() і відстанями від точки
і відстанями від точки ![]() до цих точок, в статиці на дискретних кутах повороту вала по вимірюваннях величин зазорів під датчиками величин зазорів і розрахованих по отриманих функціональних залежностях відстанях від точки
до цих точок, в статиці на дискретних кутах повороту вала по вимірюваннях величин зазорів під датчиками величин зазорів і розрахованих по отриманих функціональних залежностях відстанях від точки ![]() до точок частин обвідної на кутах установки датчиків величин зазорів розраховують і оцінюють координати осі обертання вала в базовій системі координат, суміщують вісь обертання вала з початком
до точок частин обвідної на кутах установки датчиків величин зазорів розраховують і оцінюють координати осі обертання вала в базовій системі координат, суміщують вісь обертання вала з початком ![]() базової системи координат, запам'ятовують сигнали управління на регулятори положення вала, які на дискретних кутах повороту забезпечують суміщення осі обертання вала з початком
базової системи координат, запам'ятовують сигнали управління на регулятори положення вала, які на дискретних кутах повороту забезпечують суміщення осі обертання вала з початком ![]() базової системи координат, вимірюють і запам'ятовують величини зазорів стабілізації під датчиками величин зазорів, установлених по осях базової системи координат
базової системи координат, вимірюють і запам'ятовують величини зазорів стабілізації під датчиками величин зазорів, установлених по осях базової системи координат ![]() які на дискретних кутах повороту вала відповідають незміщеному положенню осі обертання, наведені вище дії виконують для перерізу по В-В аеростатичної шпиндельної опори, отримують і запам'ятовують сигнали управління на регулятори положення вала, які на дискретних кутах повороту забезпечують суміщення осі обертання вала з початком
які на дискретних кутах повороту вала відповідають незміщеному положенню осі обертання, наведені вище дії виконують для перерізу по В-В аеростатичної шпиндельної опори, отримують і запам'ятовують сигнали управління на регулятори положення вала, які на дискретних кутах повороту забезпечують суміщення осі обертання вала з початком ![]() базової системи координат
базової системи координат ![]() отримують і запам'ятовують величини зазорів стабілізації під датчиками величин зазорів, установлених по осях базової системи координат
отримують і запам'ятовують величини зазорів стабілізації під датчиками величин зазорів, установлених по осях базової системи координат ![]() які на дискретних кутах повороту вала відповідають незміщеному положенню осі обертання вала, балансують вал аеростатичної шпиндельної опори для цього валу опори задають обертання з номінальною швидкістю, на дискретах стабілізації на регулятори положення вала подають сигнали управління, які в статиці запобігають зміщенню осі обертання вала відносно початків
які на дискретних кутах повороту вала відповідають незміщеному положенню осі обертання вала, балансують вал аеростатичної шпиндельної опори для цього валу опори задають обертання з номінальною швидкістю, на дискретах стабілізації на регулятори положення вала подають сигнали управління, які в статиці запобігають зміщенню осі обертання вала відносно початків ![]() і
і ![]() базових систем координат, на довільному куті повороту вала отримують оцінки координат осі обертання вала в перерізах по А-А і В-В цього вала, визначають величину і напрямок зміщення осі обертання вала в цих перерізах, балансують вал і запобігають зміщенню осі обертання вала під дією динамічного навантаження, в процесі роботи аеростатичної шпиндельної опори стабілізують радіальне положення осі обертання вала, для цього на дискретах стабілізації порівнюють поточне значення величин зазорів під датчиками величин зазорів, установлених по осях базових систем координат
базових систем координат, на довільному куті повороту вала отримують оцінки координат осі обертання вала в перерізах по А-А і В-В цього вала, визначають величину і напрямок зміщення осі обертання вала в цих перерізах, балансують вал і запобігають зміщенню осі обертання вала під дією динамічного навантаження, в процесі роботи аеростатичної шпиндельної опори стабілізують радіальне положення осі обертання вала, для цього на дискретах стабілізації порівнюють поточне значення величин зазорів під датчиками величин зазорів, установлених по осях базових систем координат ![]() і
і ![]() з відповідними величинами зазорів стабілізації, при відхиленні поточних величин зазорів від відповідних величин зазорів стабілізації виробляють сигнали управління на регулятори положення вала і запобігають радіальному зміщенню осі обертання вала відносно початків
з відповідними величинами зазорів стабілізації, при відхиленні поточних величин зазорів від відповідних величин зазорів стабілізації виробляють сигнали управління на регулятори положення вала і запобігають радіальному зміщенню осі обертання вала відносно початків ![]() і
і ![]() базових систем координат.
базових систем координат.
Текст
Винахід відноситься до галузі верстатобудування і може бути використаний при конструюванні аеростатичних шпиндельних опор верстатів особливо високої точності і, окрема, суперпрецизійних верстатів алмазного мікроточіння. Відомий патент України "Пристрій компенсації радіальних навантажень на вал радіальної аеростатичної опори" №25727 А від 30.10.98р. Спосіб, який реалізується цим пристроєм, вибраний в якості прототипу і полягає у наступному. A A A В двох перерізах по A - A і B - B радіальної аеростатичної опори по осям систем координат X O Y і X1A O1 A Y1A , осі яких у кожному перерізі зсунуті на кут 45°, установлені датчики величин зазорів. Б Б Б Г Г Г В перерізах по Б - Б і Г - Г цієї опори, симетрично відносно осей систем координат X O Y і X O Y , установлені групи регуляторів тиску, які запобігають зміщенню осі обертання вала опори відносно вибраного її незміщеного положення. A A A В В В Б Б Б Г Г Г Осі систем координат X O Y , X O Y , X O Y , X O Y паралельні і вибираються в якості базових систем координат, в яких визначаються величини опорних зазорів, які відповідають незміщеному положенню осі обертання вала, і до яких прив’язуються сигнали управління на групи регуляторів тиску, відповідно. Перерізи вала по A - A і B - B задають еліпсами, визначають величини великих і малих напівосей еліпсів, розраховують їх ексцентриситети і полярні радіуси на кута х установки датчиків величин зазорів. Датчики величин зазорів установлюють з однаковими зазорами відносно поверхні вала і, знаючи полярні A A A A A A В В В радіуси еліпсів, розраховують координати цих датчиків в системах координат X O Y , X1 O1 Y1 , X O Y , X1В O1В Y1В . По координатам двох датчиків величин зазорів, установлених на різних осях систем координат, величинам зазорів під цими датчиками і величинах полярних радіусів еліпсів на кутах установки датчиків розраховують, / XlA , YlA / наприклад, по датчикам C1 і C 3 координати осі обертання вала з системи алгебраїчних квадратних рівнянь: ( ) ( ) ( ) 2 ì 2 A A 2 A + yC - yA ï(l1 + Z 1 ) = x C1 - x l l 1 (1) í ï(l 3 + Z 3 )2 = x A - x A 2 + y A - y A 2 l l C3 C3 î l1 і l3 - полярні радіуси еліпса в напрямку датчиків C1 і C 3 ; де: ( ) A xA i xC C A A A - координати датчиків C1 і C 3 в системі координат X O Y ; Z1 i Z 3 - величини зазорів під датчиками C1 і C 3 . 1 3 [ ] 2 По вимірюванням величин зазорів під " n " датчиками розраховують 2 × C n - 4 пар координат осі обертання 2 Cn - 4 дійсних значень координат осі обертання. Згладжують їх по методу найменших вала, відбирають квадратів і отримують оцінку координат осі обертання. Вибирають незміщене положення осі обертання вала аеростатичної опори. На дискретних кута х повороту ось обертання вала установлюють у незміщене положення, вимірюють і запам'ятовують величини опорних зазорів під датчиками величин зазорів, установлених по осям базових систем координат. В процесі компенсації радіального навантаження при відхиленні поточних величин зазорів під цими датчиками від опорних сигнали неузгодження надходять на регулятори тиску, які створюють вектори тиску рівні по величині і протилежні по напрямку радіальним навантаженням і запобігають зміщенню осі обертання вала під дією радіального навантаження. Недоліком способу прототипу можна вважати наступне. Переріз вала аеростатичної опори по своїй формі може суттєво відрізнятися від найближчого еліпса. Отже полярні радіуси l1 і l3 /1/ апроксимуючого еліпса в напрямку датчиків величин зазорів не будуть рівні відстаням від центра цього еліпса до точок обгинаючої переріз вала в напрямку на ці датчики. Так як координати датчиків, наприклад, A A A координат X O Y , X1A O1 A Y1A , A A / X A , YC / i / X A , YC / C C 1 1 3 3 з /1/ в системах визначаються як суми полярних радіусів в напрямку на ці датчики і величини зазорів під цими датчиками на куту j = 0 повороту вала при суміщеному центрі еліпса з початком базової системи координат, координати датчиків величин зазорів також визначаються з погрішністю, що призводить до зниження точності стабілізації радіального положення осі обертання вала аеростатичної шпиндельної опори. Задача, що вирішується, полягає у такому удосконаленні способу прототипу, яке забезпечує незалежно від форми обгинаючих перерізів вала аеростатичної шпиндельної опори плоскостями установки датчиків величин зазорів, установку основ датчиків величин зазорів по колам, центри яких суміщені з печатками базових систем координат, і точне визначення координат цих датчиків в базових системах координат, побудову функціональних залежностей між кутовим положенням точок на обгинаючих перерізів вала опори і відстанями від осі обертання вала до цих точок у вигляді полінома n - го ступеня з точністю, яка визначається ступенями поліномів, що забезпечує точне визначення відстаней від осі обертання вала до точок обгинаючої переріза вала в напрямку датчиків величин зазорів і на цій основі підвищити точність стабілізації радіального положення осі обертання вала аеростатичної шпиндельної опори. Задача, що вирішується, полягає також у такому удосконалені способу прототипу, що дозволяє виконати балансування вала опори з високою точністю. Рішення задачі досягається тим, що спосіб стабілізації радіального положення осі обертання вала аеростатичної шпиндельної опори, який включає апроксимацію еліпсами обгинаючих перерізів вала аеростатичної шпиндельної опори плоскостями установки датчиків величин зазорів, розрахунок координат датчиків величин зазорів, установлених по осям систем координат з суміщеними печатками, які лежать в плоскостях установки датчиків величин зазорів, розрахунок і оцінку координат осі обертання вала аеростатичної шпиндельної опори, а також вибір її незміщеного положення, формування масивів величин зазорів стабілізації під датчиками величин зазорів, установлених по осям базових систем координат, формування сигналів управління на регулятори положення вала аеростатичної шпиндельної опори, згідно винаходу, на обгинаючій переріза вала аеростатичної шпиндельної опори по A - A площині установки датчиків величин зазорів визначають точки максимального розміру цього переріза, відрізок прямої максимального розміру переріза вала, яка з'єднує точки максимального розміру переріза вала, суміщають з віссю A X1 A A A базової системи координат X1 O1 Y1 , кут повороту вала, на якому відрізок прямої максимального розміру переріза вала був суміщений з віссю A X1 , A приймають в якості нульового j = 0 кута повороту вала, точку O переріза вала по A - A площині установки датчиків, яка лежить на відрізку прямої максимального розміру переріза вала при суміщеному положенню цієї прямої з віссю A X1 базової системи координат і співпадає з початком A O1 базової системи координат, приймають в якості точки осі обертання вала, а положення осі обертання вала, при якому вона проходить через початок A O1 A базової системи координат, приймають в якості її незміщеного положення, радіус кола з центром в точці O і яке проходить через одну з точок максимального розміру переріза вала приймають рівним розрахунковій величині радіуса R вала аеростатичної шпиндельної опори, послідовно основи кожних чотирьох датчиків величин зазорів, установлених по осям кожної системи координат в перерізі вала по A - A площині установки датчиків, установлюють по колу радіуса R1 , який більше радіуса R на величину розрахункового зазору аеростатичної A шпиндельної опори і визначають відстані від точки O до точок обгинаючої переріза вала, розташованих на куту j = 0 повороту вала під центрами основ датчиків величин зазорів, координати датчиків величин зазорів, установлених в перерізі вала по A - A по осям " к " систем координат перераховують в координати базової A A A системи координат X1 O1 Y1 , в цьому же перерізі вала уводять жорстко зв'язану з валом систему координат X A O A Y A , початок якої суміщають з точкою O A переріза вала, а її осі координат на куту j = 0 повороту вала A A A суміщають з однойменними осями базової системи координат X1 O1 Y1 , будують функціональну залежність у вигляді полінома n - го ступеня між кутовим положенням точок частини обгинаючої переріза вала, розташованих A під центрами основ датчиків величин зазорів на куту j = 0 повороту вала, яка лежить над віссю X системи A A A A координат X O Y , і відстанями від точки O до цих точок і функціональну залежність у вигляді полінома n - го ступеня між кутовим положенням точок частини обгинаючої переріза вала, розташованих під центрами A основ датчиків величин зазорів на куту j = 0 повороту вала, яка лежить під віссю X системи координат X A O A Y A , і відстанями від точки O A до цих точок, в статиці на дискретних кутах повороту вала по вимірюванням величин зазорів під датчиками величин зазорів і розрахованим по отриманим функціональним залежностям A відстаням від точки O до точок частин обгинаючої на кутах установки датчиків величин зазорів розраховують i A A A оцінюють координати осі обертання вала в базовій системі координат X1 O1 Y1 , суміщають ось обертання вала з початком A O1 базової системи координат, запам'ятовують сигнали управління на регулятори положення OA вала, які на дискретних кута х повороту забезпечують суміщення осі обертання вала з початком 1 базової системи координат, вимірюють і запам'ятовують величини зазорів стабілізації під датчиками величин зазорів, A A A установлених по осям базової системи координат X1 O1 Y1 , які на дискретних кутах повороту вала відповідають незміщеному положенню осі обертання, наведені вище дії виконують для переріза по B - B аеростатичної шпиндельної опори, отримують і запам’ятовують сигнали управління на регулятори положення вала, які на дискретних кутах повороту забезпечують суміщення осі обертання вала з початком системи координат X1B O1B Y1B , OB 1 базової отримують і запам'ятовують величини зазорів стабілізації під датчиками величин B B B зазорів, установлених по осям базової системи координат X1 O1 Y1 , які на дискретних кута х повороту вала відповідають незміщеному положенню осі обертання вала, балансують вал аеростатичної шпиндельної опори для чого валу опори задають обертання з номінальною швидкістю, на дискретах стабілізації на регулятори положення вала подають сигнали управління, які в статиці запобігають зміщенню осі обертання вала відносно O A i OB 1 базових систем координат, на довільному куту повороту вала отримують оцінки координат осі початків 1 обертання вала в перерізах по A - A і B - B цього вала, визначають величину і напрямок зміщення осі обертання вала в цих перерізах, балансують вал і запобігають зміщення осі обертання вала під дією динамічного навантаження, в процесі роботи аеростатичної шпиндельної опори стабілізують радіальне положення осі обертання вала для чого на дискретах стабілізації порівнюють поточне значення величин зазорів під датчиками A A A B B B величин зазорів, установлених по осям базових систем координат X1 O1 Y1 і X1 O1 Y1 з відповідними величинами зазорів стабілізації, при відхиленні поточних величин зазорів від відповідних величин зазорів стабілізації виробляють сигнали управління на регулятори положення вала і запобігають радіальному зміщенню O A i OB 1 базових систем координат, на довільному куту поворота вала осі обертання вала відносно початків 1 отримують оцінки координат осі обертання вала в перерізах по А-А і В-В вала в ци х перерізах, балансують вал і запобігають зміщення осі обертання вала під дією динамічного навантаження, в процесі роботи аеростатичної шпиндельної опори стабілізують радіальне положення осі обертання вала для чого на дискретах стабілізації порівнюють поточне значення величин зазорів під датчиками величин зазорів, установлених по осям базових A A A B B B систем координат X1 O1 Y1 і X1 O1 Y1 відповідними величинами зазорів стабілізації, при відхиленні поточних величин зазорів від відповідних величин зазорів стабілізації виробляють сигнал управління на A B регулятори положення вала і запобігають радіальне зміщення осі обертання вала відносно початків O1 і O1 базових систем координат. Причинно-наслідковий зв’язок технічного рішення, що заявляється, з досягаємим технічним результатом полягає у наступному. На Фіг.1 показаний осьовий переріз аеростатичної шпиндельної опори 2, в перерізах по A - A і B - B якої A A A A A A A A A B B B B B B B B B /Фіг.2/ по осям систем координат X1 O1 Y1 , X2 O2 Y2 , X3 O3 Y3 і X1 O1 Y1 , X2 O 2 Y2 , X3 O3 Y3 установлені датчики 3 C1 ¸ C12 величин зазорів. Б Б Б Б Б Б Б Б Б Г Г Г В перерізах по Б-Б і Г-Г опори 2 /Фіг.3/ по осям систем координат X1 O1 Y1 , X2 O2 Y2 , X3 O3 Y3 і X1 O1 Y1 , Г Г XГ OГ Y2 , XГ OГ Y3 осі яких паралельні відповідним осям систем координат в перерізах по А-А і В-В опори 2, 2 2 3 3 установлені регулятори 10 тиску газа, які в кожному перерізі об'єднані в чотири групи 11, 12, 13, 14 і 15, 16, 17, 18 регуляторів положення вала 1 опори 2. A A A B B B Системи координат X1 O1 Y1 і X1 O1 Y1 приймають в якості базових, в яких визначаються координати осі обертання вала 1 в перерізах по А-А і В-В, вибирається її незміщене положення і формуються сигнали управління, які забезпечують стабілізацію радіального положення осі обертання вала 1 аеростатичної шпиндельної опори 2. А B Наділення опори 2 названими вище пристроями дозволяє точки O і O перерізів вала 1, які співпадають A A A O1 і OB систем координат X1 O1 Y1A при заданому положенні вала 1, вибирати в якості точок осі обертання вала 1 1. Основи датчиків 3 величин зазорів C1 ¸ C12 незалежно від конфігурації перерізів вала 1 установлюють по A B колам з центрами в початках O1 і O1 базових систем координат. Це виключає погрішності визначення координат датчиків 3 із-за неточної апроксимації обгинаючих вала 1. А B На куту j = 0 повороту вала 1 визначають відстані від точок O і O до точок обгинаючих перерізів вала 1, які лежать під центрами основ датчиків 3, і будують функціональні залежності між кутовим положенням точок А B обгинаючих і відстанями до них від точок O і O /від осі обертання вала 1/ у вигляді поліномів n-гo ступеня. Якщо ступені поліномів достатньо високі, відстані " l" від осі обертання до точок обгинаючих, які входять в системи /II/ алгебраїчних квадратних рівнянь для визначення координат осі обертання вала І, будуть визначатися точніше, чим при апроксимації перерізів вала еліпсами. По вимірюванням величин зазорів під датчиками 3 і відстаням від осі обертання вала 1 до точок обгинаючих 2 перерізів вала 1 під центрами основ датчиків 3 /Фіг.4/ на поточних кута х поворота вала 1 вирішують / Cn - 2k / систем рівнянь вигляду /II/, обчислюють і оцінюють /отримують точні значення/ координат осі обертання вала 1 в перерізах по А-А і В-В. В статиці на кута х поворота вала 1 зміщення його осі обертання відбувається із-за деформації поля тиска опори 2 погрішностями розмірів і форми її виготовлення. На дискретних кутах поворота вала І формують сигнали управління на регулятори 11-18 положення вала 1. які запобігають цьому зміщенню. При подачі цих сигналів управління на регулятори 11¸ 18 положення вала 1, коли вал 1 обертається і збалансований при відсутності радіального навантаження зміщення осі обертання вала 1 не відбувається. Якщо вал 1 розбалансований, визначають координати зміщеної осі обертання /Фіг.5/. розраховують величину і напрямок зміщення осі обертання у відповідності з /24/ і /25/. балансують вал І. наприклад, за допомогою балансувальних вагів. На дискретних кутах поворота вала 1, при незміщеному положенні осі обертання, вимірюють величини зазорів стабілізації під датчиками 3 величин зазорів, установлених по осям базових систем координат. В процесі роботи опори 2 порівнюють величини поточних зазорів під цими датчиками з величинами зазорів стабілізації. При відхиленні поточних величин зазорів від відповідних величин зазорів стабілізації на регулятори 11-18 положення вала 1 виробляються сигнали управління. які забезпечують стабілізацію радіального положення осі обертання вала 1 аеростатичної шпиндельної опори 2. Винахід пояснюється кресленнями: Фіг.1 - аеростатична шпиндельна опора /осьовий переріз/; Фіг.2 - датчики величин зазорів в перерізах по А-А і В -В аеростатичної шпиндельної опори; Фіг.3 - регулятори положення вала в перерізах по Б-Б і Г-Г аеростатичної шпиндельної опори; Фіг.4 - обчислення координат осі обертання вала по вимірюванням величин зазорів під двома датчиками величин зазорів; Фіг.5 - ілюстрація напрямку і величини зміщення осі обертання вала під дією динамічного навантаження; Фіг.6 - функціональна схема пристрою стабілізації радіального положення осі обертання вала аеростатичної шпиндельної опори. Пристрій стабілізації осі обертання вала 1 аеростатичної шпиндельної опори 2 /Фіг. 1, осьова аеростатична опора не показана/ включає датчики 3 величин зазорів 4 між основами датчиків 3 і поверхнею вала 1. Датчики 3 величин зазорів установлені у втулці 5 аеростатичної шпиндельної опори 2 /в двох перерізах цієї опори 2 по А-А і В-В /Фіг.2/, перпендикулярних осі обертання вала 1. A A A A A A A A A B B B В кожному із згаданих перерізів по осям систем координат X1 O1 Y1 , X2 O2 Y2 , X3 O3 Y3 і X1 O1 Y1 , B B XBOB Y2 , XBOB Y3 , початки яких суміщені, а осі зсунуті на кут j = 30 установлено дванадцять C1 ¸ C12 датчиків 2 2 3 3 З величин зазорів. В загальному випадку датчики 3 можуть установлюватися по осям k > 3 систем координат. Координати осі обертання вала A A A B B B 1 обчислюють в системах координат X1 O1 Y1 і X1 O1 Y1 і приймають їх в якості базових систем координат. У втулці 5 в перерізах по Б-Б і Г-Г рівномірно по колу виконують дванадцять /в данному прикладі/ жиклерів 6 подачі газа в зазори аеростатичної шпиндельної опори 2. Кожний жиклер 6 з'єднує камеру наддува 7 з згаданими зазорами. В камерах наддува 7 установлені п’єзоелектричні двигуни 8 /ПЕД 8/ з установленими на них регулювальними голками 9, які призначені для зміни площ поперечних перерізів жиклерів 6. Жиклер 6, ПЕД 8, регулювальна голка 9, камера наддува 7 утворюють регулятор тиска 10 в зазорі аеростатичної шпиндельної опори 2. Регулятори 10 тиску газа, які розташовані в одном перерізі, об'єднані в чотири групи /Фіг.3/:перша гр упа II регуляторів положення вала, друга група 12 регуляторів положення вала, третя група 13 регуляторів положення вала, четверта група 14 регуляторів положення вала в перерізі опори 2 по Б-Б і перша група 15 регуляторів положення вала, друга група 16 регуляторів положення вала, третя група 17 регуляторів положення вала, четверта гр упа 18 регуляторів положення вала виконані в перерізі по Г-Г опори 2. Регулятори 10 тиску кожної групи 11 - 18 регуляторів положення виконані симетрично відносно осей базових систем координат /Фіг. 3/. Причому, гр упи 11, 12, 13, 14 регуляторів положення вала, які виконані в перерізі по Б-Б і датчики 3 величин зазорів, які установлені в перерізі по А-А опори 2 /Фіг. 1/, утворюють компенсатор 19 радіального зміщення осі обертання вала. Групи 15, 16, 17, 18 регуляторів положення вала, які виконані в перерізі по Г-Г опори 2, і датчики 3 величин зазорів, які установлені в перерізі по Г-Г опори 2, утворюють компенсатор 20 радіального зміщення осі обертання вала 1 аеростатичної шпиндельної опори 2. Кожний датчик 3 величини зазору компенсаторів 19 і 20 радіального зміщення осі обертання з'єднаний з відповідним вимірювачем 21 величини зазору /Фіг.6/. В якості вимірювачів 21 величин зазорів можуть використовува тися вимірювачі мікроперемішень /Гриневич Б.Ф. "Измерительные компенсационно-мостовые устройства с емкостными датчиками Киев, Наукова Думка, 1987г./. Їх погрішність вимірювання не перевищує /10-3 - 10-4/ величини зазора, що вимірюється. Сигнал з кожного вимірювача 21 надходить в обчислювач 22. В якості вимірювача 22 може використовува тися персональна ЕОМ з модулем вводу - ви воду для обміном інформацією з зовнішніми функціональними елементами, наприклад, типа 9825 фірми "Хьюлетт - Паккард" / Науман Г. и др. "Стандартные интерфейсы для измерительной техники", М., Мир, 1982г./. Обчислювач 22 забезпечує: 1. Прийом інформації з вимірювачів 21, обчислення і оцінку координат осі обертання вала 1 опори 2. 2. Прийом інформації з вимірювача 40 кута поворота вала 1. 3. Формування на групи 11¸ 18 регуляторів положення вала 1 компенсаторів 19 і 20 радіального зміщення осі обертання сигналів управління, які на дискретних кута х поворота вала 1 забезпечують установку осі обертання в незміщене положення. 3. Визначення напрямку і величини зміщення осі обертання вала під дією динамічної навантаження. 4. Формування масивів величин зазорів стабілізації, які відповідають незміщеному положенню осі обертання вала 1 на дискретах кута його поворота. На торці аеростатичної шпиндельної опори 2 укріплений датчик 23 кута поворота вала 1 в якості якого може бути використаний багатополюсний обертаючийся трансформатор /под редакцией Ахметжанова А.А. "Электромеханические преобразователи угла с электрической редукцией М., "Энергия", 1978г./. З обчислювача 22 сигнал сигнал UAпр. 2 у UAпр. 1 у управління положенням вала 1 на групи 11 і 13 регуляторів положення вала, управління положенням вала на групи 12 і 14 регуляторів положення вала, сигнал UB пр. 1 у UB пр. 2 у управління положенням вала на групи 15 і 17 регуляторів положенням вала, сигнал управління положенням вала 1 на групи 16 і 18 регуляторів положення вала надходять через два операційних підсилювача 24 і 25 кожний /Фіг. 6/. Причому, на операційні підсилювачі 24 сигнали управління надходять на їх прямі входи, а на операційні підсилювачі 25 сигнали надходять на їх інвертируючі входи. Отже кожна пара операційних підсилювачів 24 і 25 формують рівні по величині і протилежні по фазі напруги, які відповідають сигналам управління. Виходи кожної пари операційних підсилювачів 24 і 25 вимикачами 26 "увімк. - вимк." підключаються до входів диференціальних підсилювачів 27 сигналів управління. Диференціальні підсилювачі 27 сигналів управління призначені для формування протифазних напруг, різниця UA UA UB UB потенціалів між якими відповідає сигналам управління у пр. 1 , у пр. 2 , у пр. 1 , у пр. 2 . Виходи диференціальних підсилювачів 27 в процесі підготовки пристрою стабілізації до роботи вимикачами 28 "увімк. - вимк." в положенні "увімк." підключаються до відповідних груп 11 - 18 регуляторів положення вала. Причому, до кожного диференціального підсилювача 27 підключаються дві групи регуляторів положення вала І, A A A які розташовані по напівосях, паралельних однойменним напівосям базових систем координат X1 O1 Y1 і B B X1 OB Y1 . При роботі пристрою в режимі стабілізації диференціальні підсилювачі 27 вимикачами 28 1 відключаються від груп 11¸ 18 регуляторів положення вала. Напруги, які відповідають величинам зазорів стабілізації, з обчислювача 22 надходять на перші входи диференціальних підсилювачів 29, 30, 31, 32, 33, 34, 35, 36 сигналів неузгодження. На другі входи диференціальних підсилювачів 29, 30, 31, 32 надходять сигнали вимірювачів 21 величин зазорів по сигналам A A A A датчиків 3 величин зазорів, установлених по напівосям X1 , - X1 , Y1 , - Y1 базової системи координат A A X1 O1 Y1A в перерізі по А-А вала 1. На другі входи диференціальних підсилювачів 33, 34, 35, 36 надходять B сигнали вимірювачів 21 величин зазорів по сигналам датчиків 3 величин зазорів, установлених по напівосям X1 , B B B B - XB , Y1 , - Y1 базової системи координат X1 OB Y1 в перерізі по В-В вала 1. 1 1 Отже диференціальні підсилювачі 29 ¸ 36 призначені для формування протифазних сигналів, різниця потенціалів між якими пропорційна величинам відхилень поточних значень величин зазорів під датчиками 3 величин зазорів, установлених в порорізах по А-А і В-В опори 2 по осям базових систем координат від величин відповідних зазорів стабілізації, які відповідають незміщеному положенню осі обертання вала 1 аеростатичної шпиндельної опори 2. Сигнали управління з виходів диференціальних підсилювачів 29, 30, 31, 32, 33, 34, 35, 36 через перемикач "робота - вимк." в положенні "робота" надходять на групи 11, 12, 13, 14, 15, 16, 17, 18 регуляторів положення вала 1, відповідно. В результаті кожна пара 11 і 13, 12 і 14 регуляторів положення вала 1 в перерізі по Б-Б опори 2, 15 і 17, 16 і 18 в перерізі по Г-Г опори 2 компенсаторів 19 і 20 осі обертання вала 1 створюють силу тиску на вал 1, рівну по величині і протилежну по напрямку складової радіального навантаження на вал 1 по відповідній осі Б Б Б Г Г Г систем координат X1 О1 У1 і X1 О1 У1 в перерізах по Б-Б і В-В опори 2 і запобігають зміщенню вала 1 з незміщеного положення під дією зовнішнього радіального навантаження, із-за деформації поля тиску в газовому шарі опори 2 погрішностями розмірів і форми її виготовлення, а також залишкового дисбалансу. 38 - балансувальні ваги; 39 - планшайба: 40 - вимірювач кута повороту вала 1 по сигналам датчика 23 кута повороту. В якості вимірювача кута повороту може використовуватися перетворювач фаза - код /под редакцией Ахметжанова A.A. "Электромеханические преобразователи угла с электрической редукцией", М., "Энергия", 1978 г./. Причому, датчики 3 величин зазорів компенсаторів 19 і 20 радіального зміщення вала 1 аеростатичної шпиндельної опори 2 з'єднані з входами вимірювачів 21 величин зазорів, виходи вимірювачів 21 величин зазорів з’єднані з входами обчислювача 22, а виходи вимірювачів 21 величин зазорів по датчикам 3 величин зазорів, установлених по осям базових систем координат, додатково з'єднані з входами диференціальних підсилювачів 29, 30, 31, 32, 33, 34, 35, 36 сигналів неузгодження, виходи вимірювача 40 кута повороту вала з'єднані з входами обчислювача 22, виходи обчислювача 22 з'єднані з входами диференціальних підсилювачів 29, 30, 31, 32, 33, 34, 35, 36 сигналів неузгодження, виходи ди ференціальних підсилювачів 29, 30, 31, 32, 33, 34. 35, 36 сигналів неузгодження через перемикач 37 "робота-вимк." з'єднані з відповідними групами 11, 12, 13, 14, 15, 16, 17, 18 регуляторів положення вала 1 компенсаторів 19 і 20 радіального зміщення осі обертання вала 1 аеростатичної шпиндельної опори 2, входи кожної пари операційних підсилювачів 24 і 25 з’єднані з виходами обчислювача 22, виходи кожної пари операційних підсилювачів 24 і 25 через вимикачі 26 "увімк.-вимк." з'єднані з входами відповідних диференціальних підсилювачів 27 сигналів управління, а їх виходи через вимикачі 28 "увімк.-вимк." з’єднані з відповідними групами 11, 12, 13, 14, 15, 16, 17, 18 регуляторів положення вала компенсаторів 19 і 20 радіального зміщення осі обертання вала 1 аеростатичної шпиндельної опори, виходи датчика 23 кута повороту з’єднані з входами вимірювача 40 кута повороту вала 1. В даному прикладі реалізації способу стабілізації радіального положення осі обертання вала 1 опори 2 в перерізах по А-А і В-В опори 2 по осям трьох систем координат, початки яких суміщені, а осі зсунуті на кут j = 30, установлені дванадцять датчиків 3 величин зазорів: C1, C2, C3, C4 , C5, C6 , C7, C8, C9, C10 , C11, C12 , A A A В В В Куто ве положення кожного з цих датчиків в базових системах координат X1 О1 У1 і X1 О1 У1 дорівнює: a 1 = a С 3 = 150 o; a 2 = a С 2 = 60o ; a 3 = a С1 = 90o; a 4 = a С2 = 120o ; a 5 = a С11 = 150o ; a 6 = a С10 = 180 o; a 7 = a С 9 = 210 o ; a 8 = a С 8 = 240 o ; a 9 = a С = 270o ; a 10 = a С6 = 300o ; a 11 = a С5 = 330 o; a 12 = a С = 0o. 7 4 Спосіб стабілізації радіального положення осі обертання вала 1 аеростатичної шпиндельної опори 2 здійснюється наступним чином. 1. Визначають і установлюють точки максимального розміру вала 1 на обгинаючій переріза вала 1 по А-А площини установки датчиків 3 величин зазорів C1 - C12 під центри основ датчиків 3 величин зазорів C4 і C10 , A A A A установлених по осі X1 базової системи координат X1 О1 У1 такі, що довжина відрізка прямої, який з’єднує ці A точки і проходить через початок О1 цієї базової системи координат, являється максимальним розміром переріза вала 1 по А-А площини установки датчиків 3. Отже відрізок прямої максимального розміру вала 1 /а2а4, Фіг.2/ A A A A суміщають з віссю X1 базової системи координат X1 О1 У1 . Для цього вал 1 опори 2 установлюють на довільний кут повороту. Регуляторами 11 і 13 положення вала 1 під датчиками 3 C1 і C7 установлюють рівні величини зазорів 4: Z1 = Z 7. Вимірюють і запам'ятовують величину зазору 3 C10 , а також величину зазору 3 C4 . З дискретністю Dj вал 1 опори 2 послідовно установлюють на кут o повороту Dj, 2 × D j, 3 × Dj, ..., 360 - D j. На кожному дискретному куту повороту регуляторами 11 і 13 положення А A A A вала 1 зміщують вал 1 по осі У1 системи координат X1 О1 У1 і під датчиками 3 C1 і C7 установлюють рівні A Z1 = Z7 величини зазорів 4. Регуляторами 12 і 14 положення вала 1 зміщують вал 1 по осі X1 системи A A A координат X1 О1 У1 і під датчиком 3 С10 установлюють величину зазору Z10 / к × Dj / = Z10 . Вимірюють і запам'ятовують величину зазору 4 Z4 / к × Dj / . Вал 1 опори 2 установлюють на кут повороту j = к × D j, на якому Z4 / к × Dj / = m min. З дискретністю Dj1 Z 4 (j = 180 ), а їх OA OA різниця дорівнює D1. Отже відрізок прямої a 4 на величину D1 менше величини відрізка a 2 і дорівнює A Oa 4 = R - D1. Зміщують датчик 3 C4 по висоті зазору і установлюють його відносно поверхні вала з зазором Z . A A R = Oa 2 + Z, Основу да тчика 3 C4 буде установлено на коло радіуса 1 центр якої співпадає з початком O1 A A A базової системи координат /з початками O1 , O 2 , O 3 , систем координат в перерізі по А-А/. o o Вимірюють величину зазору 4 Z7 (j = 180 ). Нехай Z < Z 7 (j = 180 ), а їх різниця D 2 . Отже відрізок прямої O A1 a OA . на величину D 2 менше відрізка a3 Установлюють вал 1 опори 2 на кут поворотe j = 0, а потім поворотом, наприклад, по годинниковій стрілці o A установлюють на кут повороту j = 90 . Суміщають точку O переріза вала 1 з початком базової системи A A координат. Критеріям суміщення точки O з початком O1 базової системи координат на куту повороту вала 1 o j = 90 в цьому випадку являється перевищення виміряної величини зазору Z 4 під датчиком 3 C4 на D 2 виміряної величини зазору Z10 під датчиком 3 C10 /так як датчики 3 C4 і C10 установлені по колу радіуса R1 Z4 = Z10 - D2 /, а під датчиками 3 C1 і C7 повинні бути наступні співвідношення величин виміряних зазорів: Z4 - D 2 = Z 7 + D1 або Z1 - ( D1 + D 2 ) = Z7 . A A A A A Послідовно зміщуючи вал 1 по осям X1 і У1 системи координат X1 О1 У1 методом послідовних наближень А установлюють потрібні співвідношення величин зазорів 4 C1, C4 , C7, C10 і суміщають точку О переріза вала 1 A з початком O1 базової системи координат. Зміщують датчик 3 С1 по висоті зазору і установлюють його з зазором Z відносно поверхні вала 1 /точки a2 /, а датчик 3 C7 відносно поверхні вала 1 /точки a4 / R = OA2 + Z a установлюють з зазором Z + D 1 і установлюють основи цих датчиків 3 на коло радіуса з центром в початку базової системи координат. В результаті основи датчиків 3 величин зазорів, установлених по осям базової системи координат будуть установлені по згаданому колу радіуса R1 . A A A X1 O 1 Y1 , A A O1 Установлюють вал 1 на кут поворота j = 0 ° і суміщають точку O з початком базової системи A XA координат. Для цього зміщують вал 1 регуляторами 11, 12, 13, 14 положення вала 1 по осі 1 і осі Y1 і методом послідовних наближень під датчиком 3 C 4 установлюють величину зазора 4 Z 4 = Z + D 1 , під датчиком 3 C10 Z 10 = Z , а під датчиком 3 C1 установлюють величину зазора 4 на D 2 більшу величини зазора під датчиком 3 C7 : Z 1 - Z 7 = D 2 . Вимірюють і запам‘ятовують величини зазорів Z1 i Z 7 , які відповідають незміщеному положенню осі A XAO A YA обертання вала 1 по осі Y1 системи координат 1 1 1 на куту j = 0 поворота вала 1. Розраховують величини відрізків O A a 2 = R1 - Z 1; O A a3 = R1 - Z 7 (3) A A Нагадаємо, що O a 2 = R, O a4 = R - D 1 . В результаті виконаних дій основи датчиків 3 C1, C 4 , C7 , C10 OA установлені по колу радіуса R1 , центр якого співпадає з початком 1 базової системи координат, і визначені A відстані від точки O до точок a1, a2 , a3 , a 4 обгинаючої переріза вала по А-А, які на куту поворота вала j = 0 ° розташовані під центрами основ датчиків 3 C1, C 4 , C7 , C10 . 6. Основи датчиків 3 величин зазорів C 3 , C 6 , C 9 , C12 установлюють по колу радіуса R1 , центр якої суміщений A OA з початком 1 базової системи координат. Визначають відстані від точки O в перерізі вала 1 по А-А до точок b1, b 2 , b3 , b 4 обгинаючої переріза вала 1, які на куту j = 0 поворота вала розташовані під центрами основ датчиків 3 величин зазорів C3 , C6 , C9 , C12 . Для виконання цих установок і вимірювань вал 1 опори 2 відносно кута поворота j = 0 ° поворотом проти годинникової стрілки установлюють на кут j = 30 ° . В результаті точки a1, a2 , a3 , a 4 розташуються під центрами XAO A YA основ датчиків 3 C12 , C 9 , C 6 , C3 , відповідно, установлених по осям системи координат 2 2 2 /Фіг. 2/. XA XAO A YA Суміщають відрізок прямої максимального розміра a 2 a4 з віссю 2 системи координат 2 2 2 . Для цього YA регуляторами 11, 12, 13, 14 положення вала 1 зміщують вал 1 по осі 2 цієї системи координат, наприклад, в інтервалі ± Z12 / 2 з вибраною дискретністю D Z . На кожній n-ій дискреті переміщення вимінюють величину зазора Z 3 / n / під датчиком 3 C 3 і величину зазора Z 9 / n / під датчиком 3 C 9 і обчислюють їх суму S / n / = Z 3 / n / + Z 9 / n / . Установлюють вал 1 опори 2 на дискрету переміщення, на якій S / n / = min і суміщують XA відрізок прямої максимального розміра a 2 a4 з осью 2 . A XA OA Після виконаного суміщення може статися, що точка O по осі 2 зміщена відносно печатка 1 базової A OA системи координат. Припускаючи, що точка O суміщена з початком 1 базової системи координат, датчик 3 C 3 відносно поверхні вала 1 /точки a 4 / установлюють з зазором Z 3 = R1 - O A a4 , датчик 3 C 9 /над точкою a 2 / A A з зазором Z 9 = R1 - O a2 = Z , датчик 3 C12 /над точкою a1 / - з зазором Z12 = R1 - O a1 , датчик 3 C 6 /над A точкою a3 / - з зазором Z 6 = R1 - O a3 . Поворотом вала 1 по годинниковій стрільці на кут j = 30 ° точки b1, b 2 , b3 , b 4 повертають під центри основ датчиків 3 величин зазорів C12 , C 9 , C 6 , C3 , відповідно. A По вимірюванням величин зазорів Z1, Z 7 , Z 4 , Z 10 під датчиками 3 C1, C 7 , C 4 , C10 точку O суміщають з початком базової системи координат. Незмінюючи положення вала 1 вимірюють і запам'ятовують величини зазорів Z 3 , Z 9 , Z 6 , Z12 і обчислюють суми S1 = Z 3 + Z 9 iS 2 = Z 6 + Z 12 . Поворотом вала 1 по годинниковій стрілці на кут j = 30 ° точки b1, b 2 , b3 , b 4 установлюють під центри основ датчиків 3 C1, C10 , C 7 , C 4 , відповідно. Регуляторами 11, 12, 13, 14 положення вала 1 під датчиком 3 C 7 установлюють величину зазора Z 7 = Z 6 , а під датчиком 3 C10 - величину зазора Z10 = Z 9 . Вимірюють величини зазорів Z1 i Z 4 і обчислюють суми S 3 = Z 4 + Z 10 i S 4 = Z 1 + Z 7 . Так як датчики 3 C1, C 4 , C7 , C10 установлені по колу радіуса R1 , критерієм того, що після поворота вала 1 з початкового j = 0 ° кутового положення проти XA годинникової стрілки на кут j = 30 ° і суміщення відрізка прямої максимального розміра a 2 a4 з осью 2 системи A XAO A YA координат 2 2 2 точка O співпала з початком базової системи координат, а, отже, основи датчиків 3 C 3 , C 6 , C 9 , C12 були установлені по колу радіуса R1 , являється рівність сум: (4) S1 = S 3 ; S 2 = S 4 Якщо хотя би одна з цих рівностей не виконується, після суміщення відрізка прямої максимального розміра A XA XA OA вала 1 a 2 a4 з осью 2 точка O по осі 2 була зміщена відносно печатка 1 базової системи координат. A OA Для суміщення точки O з початком 1 базової системи координат після кожного невиконання рівностей /4/ вал 1 опори 2 з початкового j = 0 ° кутового положення поворотом проти годинникової стрілки установлюють на XA кут j = 30° . Суміщають відрізок прямої максимального розміра вала 1 a 2 a4 з осью 2 і регуляторами 11, 12, 13, A XA 14 положення вала 1 зміщують вал 1 на чергову дискрету DZ /варіація положення точки O по осі 2 може, наприклад, виконуватися в інтервалі ± Z 3 /2/. A XA 2 виконуються наведені вище дії і перевіряється На кожній дискреті переміщення точки O по осі A виконання рівностей /4/. Якщо після n-ої дискрети переміщення рівності /4/ виконуються, точка O на цій A O1 дискреті була суміщена з початком базової системи координат, а основи датчиків 3 величин зазорів C3 , C6 , C9 , C12 були установлені по колу радіуса R1 . Вал 1 аеростатичної шпиндельної опори 2 установлюють на кут поворота j = 0 ° , під датчиками 3 C1, C 4 , C7 , C10 установлюють величини зазорів, які відповідають назміщеному положенню осі обертання на A OA цьому куту поворота, і суміщають тоску O з початком 1 базової системи координат. Вимірюють величини A зазорів Z 3 , Z 6 , Z 9 , Z12 і обчислюють відстані від точки O до точок b1, b 2 , b3 , b 4 в перерізі вала 1 по А-А: (5) O A b1 = R1 - Z 12 ; O A b 2 = R1 - Z 9 ; O A b3 = R1 - Z 6 ; O A b 4 = R1 - Z 3 7. Основи датчиків 3 величин зазорів C 2 , C 5 , C 8 , C11 установлюють по колу радіуса R1 , центр якої суміщений A A A X1 O 1 Y1 A . Визначають відстані від точки O в перерізі вала 1 по А-А через яку проходить ось обертання вала 1, до точок d1, d 2 , d3 , d 4 обгинаючої переріза вала 1, які на куту j = 0 ° поворота вала 1 розташовані під центрами основ датчиків 3 величин зазорів C 2 , C 5 , C 8 , C11 . з початком базової системи координат Для виконання цих установок і вимірювань вал 1 опори 2 поворотом проти годинникової стрілки установлюють на кут j = 60 ° . В результаті точки a1, a2 , a3 , a 4 розташуються під датчиками 3 C11, C 8 , C 5 , C 2 , відповідно, які установлені по осям системи координат A X A O A Y3 3 3 /Фіг. 2/. С уміщають відрізок прямої XA XAO A YA максимального розміра вала 1 a 2 a4 з осью 3 системи координат 3 3 3 . Для цього регуляторами 11, 12, A Y3 цієї системи координат, наприклад, в інтервалі ± Z11 / 2 з вибраною дискретністю DZ . На кожній n-ій дискреті переміщення вимірюють величину зазора Z 2 / n / під датчиком 3 C 2 i Z 8 / n / під датчиком 3 C 8 і обчислюють їх суму S / n / = Z 2 / n / + Z 8 / n / . Установлюють вал 1 опори 2 на дискрету переміщення, на якій S / n / = min і суміщують відрізок прямої 13, 14 положення вала 1 зміщують вал 1 по осі XA максимального розміру вала 1 a 2 a4 з осью 3 . Як і в попередньому випадку, після виконання суміщення може A XA OA виявитися, що точка O по осі 3 зміщена відносно початку 1 базової системи координат. Припускаючи, що точка суміщена з початком A O1 базової системи координат, датчик 3 C 2 відносно поверхні вала 1 /точки a 4 A A обгинаючої/ установлюють з зазором Z 2 = R1 - O a 4 , датчик 3 C 8 /над точкою a 2 / - з зазором Z 8 = R1 - O a2 , A датчик 3 C 5 /над точкою a3 / - з зазором Z 5 = R1 - O a3 , датчик 3 C11 /над точкою a11 - з зазором Z11 = R1 - O A a1 . Поворотом вала 1 проти годинникової стрілки на кут j = 60 ° точки d1, d 2 , d3 , d 4 повертають під центри основ датчиків 3 C11, C 8 , C 5 , C 2 , відповідно. По вимірюванням величин зазорів Z1, Z 7 , Z 4 , Z 10 під датчиками 3 A C1, C 4 , C7 , C10 точку O A суміщають з початком O 1 базової системи координат. Незмінюючи положення вала 1 вимірюють і запам'ятовують величини зазорів Z 2 , Z 8 , Z 5 , Z 11 і обчислюють суми S1 = Z 2 + Z 8 i S 2 = Z 5 + Z 11 . Поворотом вала 1 по годинниковій стрілці на кут j = 60 ° точки d1, d 2 , d3 , d 4 установлюють під центри основ датчиків 3 C1, C10 , C 7 , C 4 , відповідно. Регуляторами 11, 12, 13, 14 положення вала 1 під датчиком 3 C 7 установлюють величину зазора Z 7 = Z 5 , а під датчиком 3 C10 - величину зазора Z10 = Z 8 . Вимірюють величини зазорів Z1 i Z 4 і обчислюють суми S 3 = Z 4 + Z 10 i S 2 = Z1 + Z 7 . Як і в попередньому випадку, так як датчики 3 C1, C 4 , C7 , C10 установлені по колу радіуса R1 , критеріям того, що після поворота вала 1 з початкового j = 0 ° кутового положення проти годинникової стрілки на кут j = 60 ° і A XAO A YA суміщення відрізка прямої a 2 a4 максимального розміру вала 1 з осью X 3 системи координат 3 3 3 точка A O A співпала з початком O 1 базової системи координат, а, отже, основи датчиків 3 C 2 , C5 , C8 , C11 були установлені по колу радіуса R1 , як і раніше, являється рівність сум S1 = S 3 i S 2 = S 4 . A XA Якщо хотя би одна з рівностей не виконується, після суміщання відрізка прямої a 2 a4 з осью 3 точка O по осі XA 3 була зміщена відносно печатка A O1 A базової системи координат. Для суміщення точки O з початком A O1 базової системи координат після кожного невиконання рівностей сум вал 1 опори 2 з початкового j = 0 ° кутового положення поворотом проти годинникової стрілки установлюють на кут j = 60 ° . XA Суміщають відрізок максимального розміру a 2 a4 з осью 3 і регуляторами 11, 12, 13, 14 положення вала 1 зміщують вал 1 по осі XA 3 A XA 3 може, наприклад, на дискрету DZ /варіація положення точки O на осі A XA виконуватися в інтервалі ± Z 2 / 2 / . На кожній дискреті переміщення точки O по осі 3 виконують наведені вище дії і перевіряють виконання рівностей сум. Якщо після n-ої дискрети переміщення рівність сум досягнута, A точка O на цій дискреті була суміщена з початком базової системи координат C 2 , C5 , C8 , C11 , були установлені по колу радіуса R1 . A A A X1 O 1 Y1 , а основи датчиків 3 Вал 1 опори 2 установлюють на кут поворота j = 0 ° , установлюють під датчиками 3 C1, C 4 , C7 , C10 зазори, A OA які відповідають незміщеному положенню осі обертання вала 1, і суміщають точку O з початком 1 базової A системи координат. Вимірюють величини зазорів Z 2 , Z 5 , Z 8 , Z 11 і обчислюють відстані від точки O до точок d1, d 2 , d3 , d 4 в перерізі вала по А-А: O A d1 = R1 - Z 11; O A d2 = R1 - Z 8 ; O A d3 = R1 - Z 5 ; O A d4 = R1 - Z 2 . (6) XAO A YA 8. Розраховують координати датчиків 3 величин зазорів C1 ¸ C12 в базовій системі координат 1 1 1 . Основи датчиків 3 величин зазорів в результаті виконаних вище дій були установлені по колу радіуса R1 з A O1 A A A A A A A A A базової системи координат по осям систем координат X1 O 1 Y1 , X 2 O 2 Y2 , X 3 O 3 Y3 , початки яких суміщені, а осі відносно друг друга зсун уті на кут j = 30 ° . Тоді координати датчиків 3 C1 ¸ C12 в базовій системі координат приймають вигляд: центром в початку (x c1 = 0, y c1 = R1 ); (x c 2 = R1 × cos a 2 , y c 2 = R1 × sina 2 ); (x c3 = R1 × cos a1, y c 3 = R1 × sina1 ); (x c 4 = R1, y c 4 = 0); (x c5 = R1 × cos a11 , y c5 = R1 × sina 11 ); (x c 6 = R1 × cos a 10 , y c 6 = R1 × sina10 ); (x c7 = 0, y c7 = R1 ); (x c8 = R1 × cos a 8 , y c 8 = R1 × sina 8 ); (x c9 = R1 × cos a 7 , y c 9 = R1 × sina 7 ); (x c10 = -R 1, y c10 = 01 ); (7) ( x C11 = R 1 × cos a 5 , y C11 = R 1 × sin a 5 ) ( x C12 = R 1 × cos a 4 , y C12 = R 1 × sin a 4 ) В перерізі вала 1 по А-А плоскостю установки датчиків 3 величин зазорів уводять жорстко зв'язану з валом 1 A A A A аеростатичної шпиндельної опори 2 систему координат X O Y , центр якої суміщають з точкою O , яка лежить на осі обертання вала, а її осі координат на куту j = 0 ° поворота вала 1 суміщають з одноіменними осями XAO A YA базової системи координат 1 1 1 . Строять функціональну залежність, наприклад у вигляді ортогонального полінома Чєбишева n-го ступеня між кутовим положенням точок обгинаючої, по якій поверхня вала 1 пересікається з плоскостю установки датчик 3, і A відстанями від точки O до точок цієї обгинаючої. Причому, окремо будується функціональна залежність між A кутовим положенням точок частини огинаючої і відстанями від точки O до точок цієї частини обгинаючої, яка A A A A лежить над осью X системи координат X O Y і якій належать точки a 2 , d1, b1, a1, b4 , a 4 , d4 і функціональна A залежність між кутовим положенням точок частини обгинаючої і відстанями від точки O до точок цієї частини A A A A обгинаючої, яка лежить під осью X системи координат X O Y , і якій належать точки a 2 , b 2 , d2 , a3 , b3 , d3 , a 4 . В якості кутових положень цих точок приймають кутові положення датчиків 3, під центрами основ яких на куту j = 0 ° поворота вала ці точки розташовані. Подамо кутові положення згаданих точок і їх відстані від точки O A у вигляді двох таблиць: Таблиця 1 an 0 a1 a2 a3 a4 a5 a6 l A A A A A A O Aa 2 O a4 O b4 O d4 O a1 O b1 O d1 Таблиця 2 an a6 a7 a8 a9 a 10 a 11 a 12 l O Aa 2 O Ab 2 O Ad 2 O Aa 3 O A b3 O A d3 O Aa 4 По відстаням до n=7 точок /у даному прикладі реалізації способа/ на кожній частині обгинаючої і їх кутовим положенням, що складають таблицю 1 і таблицю 2, будують дві функціональні залежності у вигляді поліномів Чєбишева /Гутер P.С., Овчинский Б.В. "Элементи численного анализа и математической обработки результатов опыта", М., Наука, 1970г./: l = f 0 + f1a' + f 2 (a ' )2 + f3 ( a' ) 3 + ... + f (n -1) (a ' ) n-1 (8) l = k 0 + k 1a'+ k 2 (a' ) 2 + k 3 (a ' )3 + ... + k (n-1) (a ' )n -1 (9) де a ' - кутове положення точки під центром основи датчика 3 величини зазора в системі координат X A O A Y A на куту j поворота вала 1. 9. В статиці на кожному дискретному куту поворота вала 1 j = 0 °, D j, 2 Dj, 3D j,..., 360° - D j , аеростатичної A шпиндельної опори 2 розраховують координати осі обертання вала 1 /точки O /, регуляторами 11, 12, 13, 14 положення вала 1 зміщують вал 1 опори 2 і суміщають ось обертання вала 1 з початком A A A X1 O 1 Y1 UБ пр.1 (k × у U Бпр.2 (k у A O1 базової системи Dj) × D j) k = 0, 1 2, 3, ... , координат . Запам'ятовують сигнали управління і / / , які в статиці на дискретних кута х поворота забезпечують установку осі обертання вала 1 в незміщене положення A OA XAO A YA /суміщення точки O з початком 1 базової системи координат 1 1 1 /. На кожному дискретному куту поворота вала 1 після установки його осі обертання у незміщене положення вимірюють і запам'ятовують величини зазорів стабілізації A Z1 (k × Dj) , Z A (k × Dj) , 4 Z A (k × Dj) , 7 A Z10 (k × Dj ) XAO A YA , / k = 0, 1 2, 3, ... / під датчиками 3 величин зазорів, установлених по осям базової системи координат 1 1 1 . Виконання наведених ви ще дій на куту j = 0 ° поворота вала 1 частково відрізняється від виконання цих же дій на наступних дискретах кута поворота вала 1. Так як основи усіх датчиків 3 величин зазорів C1 - C12 були OA установлені по колу радіуса R1 з центром в початку 1 базової системи координат, довжини відрізків прямих A O A a1 , O A a 2 , O A a 3 , O A a 4 відомі, для суміщення осі обертання вала 1 /точки O A / з початком O 1 базової системи координат під датчиками 3 C1, C 4 , C7 , C10 регуляторами 11, 12, 13, 14 положення вала 1 опори 2 установлюють наступні величини зазорів, відповідно: Z1 / 0= R1 - O A a1 ; / Z 4 / 0= R1 - O A a 4 ; / Z 7 / 0= R1 - O A a 3 ; Z10 / 0= R1 - O A a2 . / / Сигнали управління UБ пр.1 / 0 / у і U Бпр.2 / 0 / у на регулятори 11, 12, 13, 14 положення вала 1, подачею яких на ці регулятори ось обертання вала 1 була суміщена з початком A Z1 /0 / , ZA 4 /0 / , ZA 7 /0 / , A Z10 /0/ A O1 базової системи координат, і величини зазорів запам’ятовують. Вал 1 опори 2 поворотом, наприклад, проти годинникової стрілки установлюють на черговий кут j = D j . В A A A системі координат X O Y , жорстко зв'язаній з валом 1 в його перерізі по A - A , на куту поворота j = D j визначають кутове положення точок частин обгинаючих, які розташувались під центрами основ датчиків 3 C1 - C12 . Для спрощення викладу будемо вважати, що вал 1 шпиндельної опори 2 нерухомий, а на кут j = D j XAO A YA XAO A YA XAO A YA поворотом по годинниковій стрільці установлюють системи координат 1 1 1 , 2 2 2 , 3 3 3 разом з установленими по їх осям датчиками 3 C1 - C12 величин зазорів навколо їх початків. Тоді кутове положення точок частини обгинаючоїпід центрами основ датчиків 3 C1, C 2 , C 3 , C11, C12 , розташованих у верхній A A A XAO A YA напівплоскості базової системи координат 1 1 1 у р ухомій системі координат X O Y при установці вала на кут j розраховується по наступному правилу. Для датчика 3 C 3 : 1. Обчислюється різниця між кутом установки датчика 3 C 3 a 1 в базовій системі координат і кутом j поворота вала 1: a 1 - j . 2. Виконується перевірка: a 1 - j ³ 0 . Якщо ця нерівність виконується, кутове положення точки в рухомій A A A системі координат X O Y , що розташувалась під центром основи датчика 3 C 3 після установки вала 1 на кут ' j a1 = a1 - j . A A A 3. Якщо a 1 - j a1 > 180° , a '7 = a'1 - 180° . Під датчиками 3 C 8 , C 7 , C 6 , C5 , C 5 відповідно маємо: 180° ³ a '2 ³ 0° , a '8 = a '2 + 180° , 360° > a'2 > 180° , a '8 = a '2 - 180° ; 180° ³ a '3 ³ 0° , a '9 = a '3 + 180° , 360° > a'3 > 180° , a '9 = a '3 - 180° ; ' ' 180° ³ a '4 ³ 0° , a10 = a'4 + 180° , 360° > a'4 > 180° , a10 = a'4 - 180° ; ' ' 180° ³ a '5 ³ 0° , a11 = a '5 + 180° , 360° > a'5 > 180° , a11 = a '5 - 180° . a9 Нагадаємо, що тут a 1 = ac 3 , a 2 = a c 2 , a 3 = ac 1 , a 4 = a c 12 , a 5 = a c 11 , a 6 = a c10 , a 7 = a c 9 , a 8 = a c 8 , = a c 7 , a 10 = ac 6 , a 11 = a c 5 , a 12 = a c 4 . ' ' ' ' ' Наприклад, після установки вала 1 на кут j = D j = 3 ° : a1 = 27° , a 2 = 57° , a 3 = 87° , a 4 = 117° , a 5 = 147° , ' ' ' a '6 = 177° , a '7 = 207° , a '8 = 237° , a '9 = 267° , a10 = 297° , a11 = 327° , a12 = 357° . A A A Куто ве положення точки в рухомій системі координат X O Y , розташованої під центром основи датчика 3 ' C 4 після поворота вала 1 на кут j a12 = 360° - j . Кутове положення точки в цій же системі координат, розташованої під датчиком 3 C10 після установки вала 1 на кут j a '6 = 180° - j , якщо j £ 180° або a '6 360° + / 180° - j / , якщо j > 180° . A Нехай на куту поворота вала 1 j = D j = 3 ° ось обертання вала 1 /точка O / змістилась відносно початка A O1 A A A X1 O 1 Y1 базової системи координат , наприклад, із-за деформації поля тиска в газовому шарі аеростатичної шпиндельної опори 2 погрішностями розмірів і форми її вигото влення. ' ' По отриманим кутовим положенням a1 ¸ a12 точок обгинаючої під центрами основ датчиків 3 C1 ¸ C12 на куту j = D j поворота вала 1 і функціональним залежностям /8/ і /9/ визначають відстані l1 ¸ l12 від центрів основ датчиків 3 до зміщеної осі обертання вала 1 в його перерізі по A - A : l1 = l1(j ) + Z 1( j) ; l2 = l2 (j) + Z 2 (j) ; l3 = l3 (j) + Z 3 (j) ; l4 = l4 (j ) + Z 4 (j ) ; l5 = l5 (j) + Z 5 (j) ; l6 = l6 (j) + Z 6 (j) ; l7 = l7 (j) + Z 7 (j) ; l8 = l8 (j) + Z 8 (j) ; (10) l9 = l9 (j) + Z 9 (j) ; l10 = l10 (j ) + Z 10 (j ) ; l11 = l11 (j) + Z11 (j ) ; l12 = l12 (j ) + Z 12 ( j) ; Тут Z n / j / - величина зазора 4, виміряна під n-им датчиком 3 на куту j поворота вала l1(j ) ¸ l12 ( j) - відстані A від точки O до точок під центрами основ датчиків 3 C1 ¸ C12 на куту j поворота вала 1. XAO A YA Координати /7/ датчиків 3 C1 - C12 величин зазорів були визначені в базовій системі координат 1 1 1 . Отже координати осі обертання вала 1 будуть визначені в цій системі координат. По координатам пари і-го і к-го датчиків 3 величин зазорів, установлених не по одній вісі кожної з систем A A A A A A A A A координат X1 O1 Y1 , X 2 O 2 Y2 , X3 O 3 Y3 , і отриманим відстаням l1 ¸ l12 від їх центрів до осі обертання вала 1 A A A 2 A /точки O / визначають координати осі обертання вала 1 в базовій системі координат X1 O1 Y1 з / Cn - 6 / систем алгебраїчних квадратних рівнянь; ìl2 = ( xC - x A ) 2 + ( y C - y A ) 2 ïi i O i O (11) í2 2 ïlk = ( xCk - xO A ) + ( y Ck - y OA )2 î , де: i = 1 , N- 1 ; k = 1 N , N - число датчиків 3, установлених по осям систем координат в перерізі вала 1 по АА. 2 В результаті отримують 2 / C12 - 6 / = 2p пар коренів систем рівнянь /11/, " p" пар з яких являються 2 координатами осі обертання вала 1. З 2 / C12 - 6 / = 2p пар коренів систем рівнянь вигляду /11/ [ x1 / j /, y1 / j /] , [ x 2 / j /, y 2 / j /] , ..., [ x 2p / j /, y 2p / j /] /тут для скорочення замість x OA (n) ( j) і yO A ( n) ( j) уведено xn / j / і yn / j / 2 необхідно визначити C12 - 6 = p пар коренів, які являються координатами осі обертання вала 1 аеростатичної шпиндельної опори 2, , Нехай [ x1 / j /, y1 / j /] і [ x 2 / j /, y 2 / j /] - корені першої системи рівнянь / i = 1 k = 2 / , [ x 3 / j /, y 3 / j /] і [ x 4 / j /, y 4 / j /] - корені другої системи рівнянь / i = 1 k = 3 / і так далі. , Припускають, що корінь x1 / j / першої системи рівнянь являється координатної осі обертання вала 1. Обчислюють різності по нормі між коренем x1 / j / і коренями x 3 / j / і x 4 / j / другої системи рівнянь: (1) × 1 = [ x1(j ) - x 3 (j )]2 × (1) 2 = [ x1(j ) - x 4 ( j)] , (12) 2 (1) ×1 (1) 2 × × (1) 2 (1) ×1 , корінь x 5 / j / вважають тоетьою координатою осі A A по осі X1 . Інакше третьою координатою осі обертання вала 1 по осі X1 вважають корінь Нехай в якості третьої координати вибраний корінь x 6 / j / . Тоді на черговому кроці порівнюють норми: (1) × 1 = [ x1( j) - x 3 (j)] 2 + [x 1(j ) - x 6 ( j)] 2 + [ x 1(j) - x7 (j )]2 × (1) 2 (15) = [ x1( j) - x 3 (j)] 2 + [x 1(j ) - x 6 ( j)] 2 + [ x 1(j) - x8 (j )]2 A і по тому же правилу вибирають четверту координату по осі X1 . Нехай в якості четвертої координати вибраний корінь x 7 / j / . Наведену вище процедуру продовжують до тих пір, поки в якості координати осі x (j) x / j/ обертання вала 1 не буде вибраний один з пари коренів 2p -1 або 2p останньої системи рівнянь: × (1) 1 × (1) 2 2 2 2 2 2 2 2 = [ x1( j) - x 3 (j)] + [ x 1(j ) - x 6 ( j)] + [ x1 (j) - x 7 (j )] + ... + [ x1( j) - x 2p - 1(j )] = [ x1( j) - x 3 (j)] + [ x 1(j ) - x 6 ( j)] + [ x1 (j) - x 8 (j )] + ... + [ x1( j) - x 2p (j)] (1) (1) (1) (16) 2 (1) × × × < ×1 Як і раніше, порівнюють норму 1 з нормою 2 . Якщо 2 , координати x1 / j / , x 3 / j / , x 6 / j / x 7 / j / , ..., x 2p / j / осі обертання вала 1, які обчислені по " p" системам запам»ятовують. Припускають, що корінь x 2 / j / першої системи рівнянь являється координатою осі обертання вала 1 і повторюють наведену вище процедуру відбора координат осі обертання вала 1 з коренів систем рівнянь. В кінці цієї процедури будуть порівнюватися норми: × (2 ) 1 × (2 ) 2 2 2 2 2 2 2 2 = [ x 2 (j ) - x 4 ( j)] + [ x 2 (j) - x5 (j )] + [ x 2 (j ) - x 8 ( j)] + ... + [ x 2 (j) - x 2p -1(j )] = [ x 2 (j ) - x 4 ( j)] + [ x 2 (j) - x5 (j )] + [ x 2 (j ) - x 8 ( j)] + ... + [ x 2 (j) - x 2p (j )] ( 2) Порівнюють норму x 2p -1 / j / ×1 з нормою × ( 2) 2 (2 ) і, якщо ×1 < × ( 2) 2 , координати x 2 / j / , x 4 / j / , x 5 / j / x 8 / j / , ..., ( 2) осі обертання вала 1, по яким була обчислена норма ×1 запам'ятовують. (2 ) Порівнюють меншу норму з /16/ з меншою нормою з /17/. Якщо 1 по осі (17) 2 A X1 базової системи координат A A A X1 O1 Y1 ×1 3 систем координат. Крім того, це дозволяє зробити поступки по точності вимірювань і установлення. ˆ ˆ x ( j) y ( j) Якщо OA і OA не рівні нулю або відрізняються від нуля на величину, яка більше установленого UБ (j) UБ ( j) порога D , подають сигнали управління у пр. 1 і у пр. 2 на регулятори 11, 12, 13, 14 положення вала 1 і обчислюють оцінки координат осі обертання. Методом послідовних наближень суміщають вісь обертання вала 1 A A /точку O / з початком O1 , базової системи координат. Сигнали управління запамятовують. Вимірюють і A A A A запам'ятовують величини зазорів стабілізації Z1 / j / , Z 4 / j / , Z7 / j / , Z10 / j / під датчиками 3 C1 , C 4 , C7 , C10 , які відповідають незміщеному положенню осі обертання вала на куту j поворота. o Вал 1 опори 2 послідовно установлюють на кути поворота j = 2 Dj , 3 D j , 4 Dj , ..., 360 - D j . В результаті отримують масив сигналів управління і масив величин зазорів стабілізації, які на дискретних кута х поворота відповідають незміщеному положенню осі обертання вала 1 в перерізі по A - A опори 2: [UБ пр. 1(O), UБпр. 2 (O)] у у ; [UБ пр. 1(D j), UБ пр. 2 ( Dj )] у у ; [UБ пр. 1( 2Dj), UБ пр. 2 (2Dj )] у у (20) ; ..., [UБ пр.1 (360o - Dj ), UБпр. 2 (360o - Dj )] у у . A A A A A [ Z1 (O ), Z A (O ), Z 7 ( O), Z10 (O )] ; [ Z1 ( Dj), Z A ( Dj), Z A ( Dj), Z10 (D j)] ; 4 4 7 A A [ Z1 (2Dj ), Z A (2Dj ), Z A (2D j), Z10 (2Dj )] ; 4 7 (21) A A [ Z1 (3Dj ), Z A (3Dj ), Z A (3D j), Z10 (3Dj )] ; ..., 4 7 A A [ Z1 (360o - Dj), Z A (360o - Dj ), Z A (360o - Dj), Z10 (360o - D j)] . 4 7 10. Всі наведені вище дії без змін виконують для перерізів по B - B і Г - Г аеростатичної шпиндельної опори 2. В результаті отримують масив сигналів управління [UГ пр. 1(O), UГ пр. 2 (O)] у у ; [UГ пр.1 (Dj ), UГ пр. 2 (Dj )] у у ; [UГ пр. 1( 2Dj), UГ пр. 2 (2Dj )] у у [UГ пр. 1(360o у (22) ; ..., - D j), UГ пр. 2 (360o у - D j)] . і масив величин зазорів стабілізації: [ ZВ (O ), ZВ (O ), ZВ (O ), ZВ (O)] ; [ ZВ (D j), Z В ( Dj ), Z В ( Dj), Z В (Dj )] ; 1 4 7 10 1 4 7 10 [ ZВ (2Dj ), Z В (2Dj), Z В (2D j), Z В (2Dj)] ; 1 4 7 10 (23) [ ZВ (3Dj ), Z В (3Dj), Z В (3D j), Z В (3Dj)] ; ..., 1 4 7 10 [ ZВ (360o - D j), ZВ (360o - D j), Z В (360o - D j), Z В (360o - Dj )] . 1 4 7 10 11. Балансують вал 1 аеростатичної шпиндельної опори 2. Для виконання балансування валу 1 опори 2 задають обертання з номінальною швидкістю. На регулятори 11o 18 положення вала І на дискретах стабілізації j = 0 , Dj , 2 D j , 3 D j , ..., 360 - D j подають відповідні сигнали A управління з масивів /20/ і /22/, які запобігають в статиці зміщення осі обертання вала 1 відносно початків O1 і B A A A B O1 базових систем координат X1 O1 Y1 і XB OB Y1 . В динаміці, якщо вал 1 опори 2 розбалансований, динамічне 1 1 навантаження буде урівноважуватися тільки зростанням головного вектора сил тиска в газовому шарі опори 2 при зміщенні вала 1 у цьому газовому шарі. A( Z A (B) / 0 / ¸ Z 12B ) / 0 / На довільному куту поворота вала 1, наприклад, j = 0 вимірюють величини зазорів 1 під C1 ¸ C12 величин зазорів в перерізах по A - A і B - B опори 2. Отримують у відловідності з /19/ датчиками 3 ˆD ˆD ˆD ˆD оцінки X A / 0 / , YA / 0 / і XB / 0 / , YB / 0 / координат осі обертання вала 1 в цих перерізах. Визначають напрямок динамічного навантаження /Фіг. 5/: g A (B) = arctg ˆD y A( B) (O ) ˆD x A( B) (O ) (24) B A і величину L зміщення осі обертання відносно початків O1 і O1 базових систем координат в перерізах по A - A і B - B опори 2: (25) ˆA ˆA LA (B ) = [ x D(B ) (O )] 2 + [ y D(B ) (O )] 2 Балансують вал 1, наприклад, балансувальними вагами. Методом послідовних наближень установлюють центр ваги вала 1 на його ось обертання. Отже ліквідується один з факторів, які збурюють радіальне положення осі обертання. Піднімальна сила регуляторів 11¸ 18 може майже повністю використовуватися для компенсації зовнішнього радіального навантаження. 12. Стабілізують радіальне положення осі обертання вала 1 для чого на дискретах кута поворота вала 1 /на o o дискретах стабілізації/ 360 - D , Dj - D , 2 D j - D , 3 D j - D , ..., 360 - D j - D , з випередженням на величину D A затримки спрацювання регуляторів 11¸ 18 положення вала 1, порівнюють поточні величини зазорів Z1 / t / , A A Z A / t / , Z A / t / , Z10 / t / під датчиками 3 C1 , C 4 , C7 , C10 з відповідними величинами Z1 / k × Dj / , Z A / k × Dj / , 4 7 4 A A Z7 / k × Dj / , Z10 / k × Dj / зазорів ZB / t / 1 , ZB / t / 4 зазорів стабілізації для переріза по A - A опори 2, а також поточні значення величин B B , Z7 / t / , Z10 / t / під датчиками 3 C1 , C 4 , C7 , C10 , установленими в перерізі по B - B B B Z / kDj / Z10 / k Dj / опори 2, з відповідними величина зазорів стабілізації Z1 / kDj / , Z 4 / k Dj / , 7 , . При відхиленні поточних величин зазорів на дискретах стабілізації від відповідних зазорів стабілізації UБ пр.1 / к × Dj - D /, UБ пр. 2 / к × Dj - D /, U Б пр. 3 / к × Dj - D /, у у у виробляються сигнали управління на регулятори 11¸ 14 положення вала 1, які установлені в перерізі по Б-Б опори 2, і сигнали управління UГ пр.1 / к × Dj - D /, UГ пр. 2 / к × Dj - D /, U Г пр. 3 / к × Dj - D /, U Г пр. 4 / к × Dj - D / у у у у на регулятори 15 ¸ 18 положення вала 1, які установлені в перерізі по Г-Г опори 2 і запобігають зміщенню осі обертання вала 1 аеростатичної шпиндельної B O A i OB X A O A Y A XB O B Y1 . 1 базових систем координат 1 1 1 і 1 1 опори 2 відносно початків 1 Пристрій стабілізації радіального положення осі обертання вала 1 аеростатичної шпиндельної опори 2 працює наступним чином. 1. Визначають точки a 2 i a 4 /Фіг. 2/ максимального розміра вала 1 в плоскості установки датчиків 3 величин зазорів C1 ¸ C12 /в перерізі по А-А вала 1/ такі, що до вжина відрізка прямої a 2 a4 , що з'єдн ує ці точки і проходить A A A A X A O A Y A , X A O A Y2 , X3 O 3 Y3 , 2 2 через печатки систем координат 1 1 1 являється максимальним розміром переріза вала 1 плоскости установки цих датчиків 3. Для визначення точок a 2 i a 4 вал 1 установлюють на довільний кут поворота. Виконують пуск підпрограми "Індикація величин зазорів" обчислювача 22. Обчислювач 22 двійкові коди величин зазорів з виходів вимірювачів 21 величин зазорів по сигналам датчиків 3 величин зазорів C1 ¸ C12 , установлених в перерізах по А-А і В-В опори 2, перетворює в десятичні, які відображаються на екрані дисплея. Під датчиками 3 C1 i C7 установлюють рівні величини зазорів Z1 = Z 7 . Для цього виконують пуск підпрограми "Установлення вала 1" і уводять в обчислювач 22 числове значення UБ . UБ , сигнала управління у пр.2 Напруга з вихода обчислювача 22, яка відповідає сигналу у пр.2 надходить на входи операційних підсилювачів 24 і 25, а з їх ви ходів через вимикач 26 "увімк.-вимк." надходить на вхід операційного підсилювача 27 і далі через вимикач 28 "увімк.-вимк." в положенні "увімк.” надходить на регулятори 11 і 13 YA . положення вала 1. Вал 1 опори 2 буде зміщений по осі 1 Послідовно, виконуючі пуски названих вище підпрограм, під датчиками 3 C1 i C7 установлюють рівні величини зазорів. Враховують і запам’ятовують величини зазорів Z 4 i Z 10 під датчиками 3 C 4 i C10 . По показанням вимірювача 40 кута поворота, що надходять в обчислювач 22, вал 1 послідовно установлюють на кути поворота o Dj, 2 × D j, 3 × Dj,..., 360 - Dj. На кожній дискреті сигналами управління UБ пр.2 у установлюють рівні величини Z1 = Z 7 . Виконують пуски підпрограм "Індикація величин зазорів”, "Установлення вала 1" і уводять в зазорів UБ , обчислювач 22 числове значення сигнала управління у пр. 1 який через операційні підсилювачі 24 і 25, вимикач 26 "увімк.-вимк." , операційний підсилювач 27, вимикач 28 "увімк.-вимк." надходить на регулятори 12 і 14 XA положення вала 1. Вал 1 зміщується по осі 1 базової системи координат. На кожному дискретному куту поворота вала 1 установлюють Z10 / к × D j / = Z 10 . Зраховують і запам'ятовують величину зазора Z10 / к × D j / . Вал 1 установлюють на кут j, на якому Z 4 / j / = min. Не змінюючі кутового положення вала 1, виконуючі пуски підпрограм "Індикація величин зазорів" і UБ YA "Установлення вала 1", сигналом управління у пр.2 з дискретністю DZ зміщують вал 1 по осі 1 базової системи координат в інтервалі ± Z 1 / 2. На кожній n-ій дискреті переміщення зраховують з екрана дисплея величини зазорів Z 4 / n × DZ / i Z 10 / n × DZ / і обчислюють їх суму. Вал 1 установлюють на дискрету переміщення, на якій S / n × DZ / = Z 4 / n × DZ / + Z 10 / n × DZ / = min. установлені під центри основ датчиків 3 C 4 суміщений з осью A X1 a2 i a4 максимального розміра вала 1 будуть i C10 . Отже відрізок прямої максимального розміра a 2 a 4 буде базової системи координат Точки A A A X1 O 1 Y1 і буде проходити через її початок A X1 . A O1 A Точку O переріза вала 1, яка співпадає з початком базової системи координат, приймають в якості точки осі обертання вала 1. Це значить, що ця точка в процесі обертання вала 1 повинна залишатися нерухомою. Не змінюючі кутового положення вала І, виконують пуск підпрограми "Індикація величин зазорів" і по екрану дисплея, зміщують датчики 3 C1 ¸ C12 по висоті зазора і установлюють їх з зазором Z відносно поверхні вала 1. Радіус A Oa 2 A кола з центром в точці O приймають рівним розрахунковій величині радіуса R вала 1 опори 2. A R1 = O a + Z, 2 Основи датчиків 3 C1, C 4 , C7 , C10 установлюють по колу радіуса центр якої суміщений з A A A X1 O 1 Y1 A . Визначають відстані від точки O до точок a1, a 3 , a 4 на обгинаючої переріза вала 1 по А-А , які на куту поворота j = 0 розташовані під центрами основ датчиків 3 C1, C 4 , C7 . початком базової системи координат o Для цього вал 1 опори 2 по показанням вимірювача 40 кута поворота установлюють на кут j = 180 . A OA Перевіряють виконання критерію суміщення точки O з початком 1 базової системи координат для чого A виконують пуск підпрограми "Обчислення сум 1 ". Обчислюються і відображаються на екрані дисплея суми A Z 3 + Z 9 = 2Z і Z 6 + Z12 = 2Z. Рівність цих сум свідчіть про те, що точка O A суміщена з початком O 1 базової системи координат. В противному разі виконують пуски підпрограми "Установленню вала 1", уводять в U Бпр.1 ,U Б пр. 2 у у A Y2 з дискретністю DZ. Виконують пуски A підпрограми "Обчислення сум 1 " і добиваються виконання рівності Z 3 + Z 9 = 2Z. Виконують пуски тих же обчислювач 22 сигнали управління і зміщують вал 1 по осі UБ i U Бпр.2 XA , у підпрограм і сигналами управління у пр.1 зміщують вал 1 по осі 2 добиваються виконання рівності Z 6 + Z 12 = 2Z і суміщують точк у O A з початком базової системи координат. Виконують пуск підпрограми "Індикація величин зазорів". Враховують з екрана дисплея величину зазора Z 4 / j = 180o / і порівнюють величини зазорів Z i Z 4 / j = 180o / . Нехай Z 4 / j = 180o / Z, а їх різниця OA OA . рівна D 2, відрізок прямої a1 на D 2 менше відрізка прямої a3 По показанням вимірювача 40 кута поворота вал 1 установлюють на кут поворота j = 0, а потім поворотом o A OA по годинниковій стрільці установлюють на кут j = 90 . Суміщають точку O з початком 1 базової системи координат. Для цього виконують пуски підпрограм "Індикація величин зазорів" і "Установлення вала 1". Сигналами управління системи координат UБ пр.1 i U Бпр.2 у у A A A X1 O 1 Y1 . з установленою дискретністю зміщують вал 1 по осям A X1 i Y A базової Методом послідовних наближень добиваються /у відповідності з критерієм A O1 O суміщення точки з початком базової системи координат/ виконання Z 4 Z 10 - D 2 i Z1 - / D 1 + D 2 = Z 7 і суміщають точк у O A з початком базової системи координат. = / A рівностей: Виконують пуск підпрограми "Індикація величин зазорів", зміщують датчик 3 C1 по висоті зазора і установлюють його з зазором Z відносно поверхні вала 1, а датчик 3 C 7 установлюють з зазором Z + D 1 і установлюють основи цих датчиків по колу радіуса R1. A По показанням вимірювача 40 кута повороту вал 1 установлюють на кут j = 0 і суміщують точку O з початком A O1 базової системи координат. Для цього виконують пуски підпрограм "Індикація величин зазорів", UБ i U Бпр.2 у "Установлення вала 1" і по сигналам у пр.1 peгуляторами 11, 12, 13, 14 положення вала 1 під датчиками C 4 і C10 установлюють зазори Z 4 = Z + D 1, Z10 = Z, під датчиком 3 C1 установлюють зазор, який на D 2 3 більше зазора під датчиком 3 C 7 . Враховують з екрана дисплея і запам'ятовують в пам'яті обчислювача 22 /в масиві величин зазорів стабілізації/ величини зазорів A A A Z1 / 0 /, Z A / 0 /, Z 7 / 0 /, Z 10 / 0 /, 4 які відповідають незміщеному положенню осі j = 0 його поворота. По врахованим значенням величин зазорів Z1 i Z 7 розраховують обертання вала 1 на куту O A ,O A ,O A , OA величини відрізків у відповідності з /3/. Значення величин відрізків a1 a2 a 3 a4 запам'ятовують в пам'яті обчислювача 22. Основи датчиків величин зазорів 3 C 3 , C 6 , C 9 , C12 установлюють по колу радіуса R1. Визначають відстані A A A Ob ,Ob ,OA ,Ob b A від точки O до точок b1, b 2 , b3 , b 4 обгинаючої переріза вала І, розташованих на куту j = 0 поворота під центрами основ цих датчиків 3. Для цього вал 1 по показанням вимірювача 40 кута поворота поротом проти годинникової стрілки 1 2 3 4 o XA установлюють на кут поворота j = 30 /Фіг. 2/. С уміщують відрізок прямої максимального розміра a 2 a 4 осью 2 системи координат A X A O A Y2 . 2 2 По сигналам управління Виконують пуск підпрограм "Індикація величин зазорів" і "Установлення вала 1". UБ пр.1 у i U Бпр.2 у регуляторами 11, 12, 13, 14 положення вала 1 з установленою A Y . дискретністю DZ зміщують вал 1 по осі 2 На кожній n-ій дискреті переміщення з екрана дисплея зраховують величини зазорів Z 3 / n / i Z 9 / n / і обчислюють їх суму S / n / . Установлюють вал 1 на дискрету, для якої A S / n / = min і суміщають відрізок прямої a 2 a 4 , якому належить точка O A , з осью X 2 системи координат A X A O A Y2 . 2 2 A OA Припускаючі, що в результаті виконаного суміщення точка O сумістилась з початком 1 базової системи координат, виконують пуск підпрограми "Індикація величин зазорів" і зміщують датчики 3 по висоті зазора. Установлюють = Z3 під R1 - O A ;= Z6 a4 датчиками A R1 - O a ; Z 9 = 3 C 3 , C 6 , C 9 , C12 3 A R1 - O a ; = Z 12 2 наступні величини зазорів: R1 - O A . a1 o По показанням вимірювача 40 кута поворота поворотом вала 1 по годинниковій стрілці на кут j = 30 точки b1, b 2 , b3 , b 4 повертають під центри основ датчиків 3 C12 , C9 , C6 , C3 відповідно. Виконують пуски підпрограм "Індикація величин зазорів". "Установлення вала 1" і по сигналам управління UБ пр.1 у i U Бпр.2 у регуляторами 11, 12, 13, 14 положення вала 1 під датчиками 3 C1, C7 , C4 , C10 установлюють величини зазорів, рівні величинам зазорів стабілізації A A A Z1 / 0 /, Z A / 0 /, Z 4 / 0 /, Z 10 / 0 /, 7 A і суміщають точку O з OA початком 1 базової системи координат. Не змінюючи кутового положення вала 1 виконують пуск підпрограми обчислювача 22 "Обчислення сум 2A". В результаті будуть обчислені суми S1 = Z 3 + Z 9 i S 2 = Z 6 + Z 12 . Величини зазорів Z 6 i Z 9 запам'ятовують. По показанням вимірювача 40 кута поворота поворотом вала 1 по годинниковій стрільці точки b1, b 2 , b3 , b 4 установлюють під центри основ датчиків 3 C1, C10 , C 7 , C 4 , відповідно. Виконують пуски підпрограм "Індикація UБ пр.1 i U Бпр.2 у у величин зазорів" і "Установлення вала 1". Сигналами управління під датчиком 3 C 7 установлюють зазор, рівний Z 6 , а під датчиком 3 C10 зазор, рівний зазору Z 9 . Виконують пуск підпрограми "Обчислення сум 3А". В результаті будуть обчислені суми S 3 = Z 4 + Z 10 i S 4 = Z 1 + Z 7 . Перевіряють виконання рівностей /4/, які являються критерієм того, що після поворота вала 1 з початкового j = 0 кутового положення o XA проти годинникової стрілки на кут j = 30 і суміщення відрізка прямої a 2 a 4 з осью 2 системи координат A X A O A Y2 2 2 A OA точка O співпала з початком 1 базової системи координат, а датчики 3 C3 , C6 , C9 , C12 були установлені по колу радіуса R1. Якщо критерій /4/ виконується, по показанням вимірювача 40 кута поворота вал 1 опори 2 установлюють на o кут поворота j = 0 . Виконують пуски підпрограм "Індикація величин зазорів". "Установлення вала І" і під датчиками 3 C1, C4 , C 7 , C10 установлюють величини зазорів, рівні величинам зазорів стабілізації A A A Z1 / O /, Z A / O /, Z 7 / O /, Z 10 / O / . 4 З екрана дисплея зраховують значення величин зазорів Z 3 , Z 6 , Z 9 , Z 12 . По A A A A врахованим величинам зазорів розраховують величини відрізків O b1, O b 2 , O b3 , O b 4 і запам'ятовують їх в пам'яті обчислювача 22. Якщо критерій /4/ не виконується, після суміщення відрізка прямої a 2 a 4 з осью X , варірують положення цього відрізка на осі критерію /4/. CA 2 і методом послідовних наближень, повторюючі наведені вище дії, досягають виконання Основи датчиків 3 величин зазорів C 2 , C 5 , C 8 , C11 установлюють по колу радіуса R1. Визначають відстані O A d1, O A d 2 , O A d 3 , O A d 4 , від точки O A до точок d1, d 2 , d3 , d 4 обгинаючої переріза вала 1 по А-А , розташованих o на куту j = 0 поворота вала 1 під центрами основ цих датчиків 3. Для цього вал 1 по показанням вимірювача 40 кута поворота поворотом проти годинникової стрілки o CA установлюють на кут поворота j = 60 . Суміщають відрізок прямої максимального розміру d 2 d4 з осью 3 A A A системи координат C3 O3 Y3 . Виконують пуски підпрограм "Індикація величин зазорів" і "Установлення вала І". Сигналами управління UБ пр.1 і UБ пр. 2 у у DZ зміщують вал по осі A Y3 на регулятори 11, 12, 13, 14 положення вала 1 з установленою дискретністю . На кожній n - ій дискреті переміщення зраховують величини зазорів Z 2 / n / i Z 8 / n / і YA обчислюють їх сум у S / n / . Установлюють вал 1 по осі 3 на дискрету, для якої S / n / = m in і суміщають відрізок прямої a 2 a 4 , якому належить точка O A , з осью CA 3 системи координат A A C3 O A Y3 3 . A сумістилась з початком O 1 базової системи координат, виконують пуск підпрограми "Індикація величин зазорів", змішують датчики 3 C 2 , C 5 , C8 , C11 по висоті зазору і установлюють під ними наступні величини зазорів Припускаючі, що в результаті виконаного суміщення точка O A Z 2 = R1 - O A a 3 , Z 5 = R1 - O A a 3 , Z 8 = R1 - O A a 2 , Z11 =R1 - O A a1. По показанням вимірювача 40 кута поворота вал 1 поворотом по годинниковій стрільці установлюють на кут C , C ,C ,C , 60 і повертають точки d1, d 2 , d3 , d 4 під центри основ датчиків 3 11 8 5 2 відповідно. Виконують пуски підпрограм "Індикація величин зазорів", "Установлення вала 1" і сигналами управління на регулятори 11, 12, 13, 14 положення вала 1 під датчиками 3 C1, C 7 , C4 , C10 установлюють величини зазорів, рівні o величинам зазорів стабілізації системи координат. A A A Z1 / O /, Z A / O /, Z 7 / O /, Z 10 / O / . 4 A A і суміщають точку O з початком O 1 базової A Не змінюючі кутового положення вала 1 виконують пуск підпрограмми "Обчислення суми 4 ". В результаті S = Z 2 + Z 8 i S 2 = Z 5 + Z11 будуть обчислені суми величин зазорів 1 . Величини зазорів Z 5 i Z 8 запам’ятовують. По показанням вимірювача 40 кута поворота поворотом вала 1 по годинниковій стрільці точки d1, d 2 , d3 , d 4 установлюють під центри основ датчиків 3 C1, C10 , C 7 , C 4 , відповідно. Виконують пуски підпрограм "Індикація UБ і UБ величин зазорів", "Установлення вала 1" сигналами управління у пр.1 у пр. 2 під датчиком 3 C 7 установлюють зазор, рівний зазору Z 5 , а під датчиком 3 C10 зазор, рівний зазору Z 8 . Виконують пуск підпрограми A "Обчислення сум 5 ". В результаті будуть обчислені суми S 3 = Z 4 + Z 10 i S 4 = Z 1 + Z 7 . o Перевіряють виконання критерію /4/ того, що після поворота вала 1 з початкового j = 0 кутового положення o CA проти годинникової стрілки на кут j = 60 і суміщення відрізка прямої максимального розміру a 2a 4 з осью 3 A A A A A системи координат C3 O3 Y3 точка O співпала з початком O 1 базової системи координат, а датчики 3 C 2 , C 5 , C 8 , C11 , були установлені по колу радіуса R1. Якщо критерій /4/ виконується, по показанням вимірювача 40 кута поворота вал 1 опори 2 установлюють на o кут поворота j = 0 . Виконують пуски підпрограм "Індикація величин зазорів", "Установлення вала 1" і під C1, C 4 , C 7 , C10 датчиками 3 установлюють зазори, рівні величинам зазорів стабілізації A A A Z1 / O /, Z A / O /, Z 7 / O /, Z 10 / O / . 4 обчислювача 22. Величини зазорів Z1, Z 5 , Z 8, Z 11 вимірюють і запам'я товують пам'яті CA Якщо критерій /4/ не виконується, після суміщення відрізка прямої максимального розміру a 2 a 4 з осью 3 , варірують положення цього відрізка на осі досягають виконання критерію /4/. CA 3 і методом послідовних наближень, повторюючі наведені вище дії, A Обчислюють відстані від точки O до точок d1, d 2 , d3 , d 4 в перерізі вала по А-А у відповідності з /6/. A A C1 O1 Y1A Розраховуються координати датчиків 3 C1 ¸ C12 в базовій системі координат . Для цього в a 1 - a 12 цих датчиків 3. Виконують пуск обчислювач 22 уводять величину радіуса R і кутові положення 1 підпрограми "Розрахунок координат датчиків 1". Розраховують і запам'ятовують в пам'яті обчислювача 22 координати датчиків 3 C1 ¸ C12 у відповідності з /7/. Будують функціональну залежність між кутовим положенням точок обгинаючої переріза вала 1 по А-А, яка A A A A A лежить над осью C системи координат C O Y , і відстанями від точки O до цих точок і функціональну A залежність між кутовим положенням точок обгинаючої переріза вала 1 по А-А, яка лежить під осью C системи A A A A координат C O Y , і відстанями від точки O до цих точок. Для побудови цих функціональних залежностей в обчислювач 22 уводять вміст таблиці 1 і 2 і виконують пуск підпрограми "Функціональні залежності 1". Розраховуються функціональні залежності /8/ і /9/. Вал 1 по показанням вимірювача 40 кута поворота установлюють на кут j = D j . В обчислювач 22 уводять кут CAOAY A поворота вала 1 j = D j і кутове положення датчиків 3C1 ¸ C12 a 1 ¸ a 12 в базовій системі координат 1 1 1 . Виконується пуск підпрограми "Обчислення відстаней від центрів основ датчиків до осі обертання вала 1". A A A Розраховується кутове положення точок в рухомій системі координат C O У , що розташувались під центрами основ датчиків 3 C1 ¸ C12 . Вимірюються величини зазорів Z1 / j / ¸ Z 12 / j / під датчиками 3 і розраховуються відстані l (1j ) - l (j ) 12 від центрів основ датчиків 3 до осі обертання вала 1 у відповідності з /10/. Виконують пуск підпрограми "Розрахунок координат вала 1". Вирішуються 2 2 / C12 алгебраїчних квадратних 2 2 / C12 -6/ пар коренів цих рівнянь, з коренів рівнянь /11/ відбирають 2 ˆ ˆ A ( j) i Y A / j / / C12 - 6 / пар координат осі обертання вала 1, отримують оцінки C O O координат осі обертання вала 1 на куту j = D j повороту вала 1 у відповідності з/19/. рівнянь /11/, Отримують Якщо оцінки ˆ ˆ C O A ( j) i YO A / j / -6/ 2 C12 - 6 A відрізняються від нуля, тобто ось обертання вала 1 /точка O / відхилилась від A печатка O 1 базової системи координат, виконують пуск підпрограм "Індикація величин зазорів" і "Установлення A A вала 1". Зміщують вал 1 по осям C1 i Y1 . Обчислюють нові значення оцінок координат осі обертання вала 1 і A суміщають ось обертання з початком O 1 базової системи координат. Виконують пуск підпрограми "Формування масивів 1". Сигнали управління A Z1 / j /, Z A 4 UБ пр.1 (j), U Б пр. 2 ( j) у у і виміряні A / j /, Z10 / j /, які відповідають незміщеному положенню осі обертання вала 1, величини зазорів запам’ятовують у відповідних масивах пам'яті обчислювача 22. По показанням вимірювача 40 кута поворота вал 1 послідовно установлюють на кути поворота o j = 2 × D j, j = 4 × Dj, ..., j = 360 - Dj, і виконують наведені вище дії. В результаті в пам’яті обчислювача 22 буде сформований масив сигналів управління /20/ і масив величин зазорів стабілізації /21/. Усі наведені вище дії, виконуючі пуски підпрограм "Індикація величин зазорів", "Установлення вала 2", B B B B "Обчислення сум 1 ", "Обчислення сум 2 ", "Обчислення сум 3 ", "Обчислення сум 4 ", "Обчислення сум 5 ". "Розрахунок координат датчиків 2", "Функціональні залежності 2", "Обчислення відстаней від центрів основ датчиків до осі обертання вала 2", "Розрахунок координат осі обертання вала 2", "Формування масивів 2" виконують для переріза по В-В аеростатичної шпиндельної опори 2. В результаті в пам'яті обчислювача 22 буде сформований масис сигналів управління /22/ і масив величин зазорів стабілізації /23/. Балансують вал 1 аеростатичної шпиндельної опори 2. Для виконання балансування вимикачі 28 "увімк.вимк." установлюють в положення "увімк." і підключають диференціальні підсилювачі 27 до регуляторів 11 - 18 положення вала 1. Вимикачі 37 "робота - вимк." установлюють в положення "вимк.". Виконують пуск підпрограми o "Балансування". При повороті вала на кути j = 360 - D, D j - D, 2 × D j - D, 3 × D j - D,.... UБ пр.1 (j), UБпр. 2 (j ) iUГ пр. 1(j ), UГ пр.2 (j ) у у у у Сигнали управління надходять на вхід відповідних операційних підсилювачів 24 і 25. З виходів операційних підсилювачів 24 і 25 через вимикачі 26 сигнали надходять на входи відповідних диференціальних підсилювачів 27 і далі, через вимикачі 28 на відповідні регулятори 11 - 18 положення вала 1, що в статиці забезпечує незміщене положення осі обертання. На установленому куту поворота вала 1, наприклад, j = 0 обчислювач 22 опитує вимірювачі 21 величин зазорів. Розраховуються оцінки координат обертання вала 1 в перерізах по А-А і В-В опори 2 на куту j = 0 поворота вала 1 і розраховуються напрямки і величини зміщення осі обертання в цих перерізах у відповідності з /24/ і /25/. Балансують вал 1 балансувальними вагами 38 і запобігають зміщенню вала 1 під дією динамічного навантаження. Для стабілізації радіального положення осі обертання вала 1 аеростатичної шпиндельної опори 2 пристрій стабілізації установлюють в режим "Робота" Для цього пеоемикач 37 "робота-вимк." установлюють в положення "робота", а вимикачі 26 і 28 установлюють в положення "вимк". Виконують пуск підпрограми обчислювача 22 "Стабілізація". Поточне значення кута поворота вала 1 з вимірювача 40, що надходить в обчислювач 22, o o безперервно порівнюється з кутами стабілізації j = 360 - D, D j - D, 2 × Dj - D, 3 Dj - D, ..., 360 - Dj - D . При порівнянні поточного значення кута поворота вала 1 j / t / з кутом стабілізації, напруги, які відповідають величинам зазорів стабілізації A A A Z1 / k × Dj /, Z A / k × Dj /, Z 7 / k × Dj /, Z 10 / k × D j /, Z B / k × Dj /, Z B / k × Dj /, Z B / k × D j /, Z B / k × Dj /, 4 4 7 1 10 з виходів обчислювача 22 надходять на перші входи відповідних ди ференціальних підсилювачів 29, 30, 31, 32, 33, 34, 35, 36. На другі входи цих підсилювачів надходять сигнали з виходів вимірювачів 21 величин зазорів по сигналам C A O A Y A CB O B Y B датчиків 3C1, C 4 , C7 , C10 , установлених по осям базових систем координат 1 1 1 і 1 1 1 . При відхиленні на дискретах стабілізації величин зазорів під цими датчиками 3 від величин зазорів стабілізації на виходах диференціальних підсилювачів 29 ¸ 36 виникають сигнали неузгодження UБ пр.1 / k × Dj /, UБ пр.2 / k × Dj /, UБ пр.3 / k × Dj /, UБпр.4 / k × Dj /, у у у у UГ пр. 1 / k × D j /, UГ пр. 2 / k × D j /, UГ пр. 3 / k × D j /, U Г пр. 4 / k × Dj /, у у у у які через перемикач 37 надходять на відповідні регулятори 11 ¸ 18 положення вала 1 запобігають зміщенню осі A B C A O A Y A CB O B Y B обертання вала 1 з початків O 1 і O 1 , базових систем координат 1 1 1 і 1 1 1 .
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for stabilization of radial position of the axis of rotation of the shaft of aerostatic spindle support
Автори англійськоюTarasov Viktor Oleksiiovych, Zinenko Volodymyr Mykolaiovych
Назва патенту російськоюСпособ стабилизации радиального положения оси вращения вала аэростатической шпиндельной опоры
Автори російськоюТарасов Виктор Алексеевич, Зиненко Владимир Николаевич
МПК / Мітки
МПК: F16C 32/06
Мітки: стабілізації, аеростатичної, положення, опори, спосіб, шпиндельної, осі, обертання, вала, радіального
Код посилання
<a href="https://ua.patents.su/23-69126-sposib-stabilizaci-radialnogo-polozhennya-osi-obertannya-vala-aerostatichno-shpindelno-opori.html" target="_blank" rel="follow" title="База патентів України">Спосіб стабілізації радіального положення осі обертання вала аеростатичної шпиндельної опори</a>
Пристрій для юстирування положення лінійної напрямної і різцевої головки відносно осі обертання вала аеростатичної шпиндельної опори суперпрецизійного двокоординатного верстата
Номер патенту: 52410
Опубліковано: 16.12.2002
Автор: Зіненко Володимир Миколайович
МПК: B23B 41/00
Мітки: напрямної, відносної, пристрій, вала, юстирування, двокоординатного, шпиндельної, положення, суперпрецизійного, різцевої, осі, головки, аеростатичної, верстата, обертання, лінійної, опори
Формула / Реферат:
Пристрій для юстирування положення лінійної напрямної і різцевої головки відносно осі обертання вала аеростатичної шпиндельної опори суперпрецизійного двокоординатного верстата, який містить регулювальні гвинти положення лінійної напрямної, регулювальні гвинти положення різцевої головки, який відрізняється тим, що він має пристрій позиціонування датчиків величин проміжків, який включає втулку, до якої прикріплені два кронштейни, на кінцях...
Пристрій стабілізації осьового положення площини планшайби аеростатичної шпиндельної опори
Номер патенту: 51488
Опубліковано: 15.11.2002
Автор: Зіненко Володимир Миколайович
МПК: F16C 32/06
Мітки: планшайби, положення, осьового, стабілізації, пристрій, шпиндельної, площині, опори, аеростатичної
Формула / Реферат:
Пристрій стабілізації осьового положення площини планшайби аеростатичної шпиндельної опори, який включає компенсатори осьового зміщення вала, датчик величини регульованого зазору, вимірювач величини регульованого зазору, диференційний підсилювач, підсилювачі, який відрізняється тим, що в порожнині вала аеростатичної шпиндельної опори установлений вимірювальний стрижень, причому згаданий вимірювальний стрижень прикріплений до внутрішньої...
Пристрій суміщення вершини алмазного різця з віссю обертання вала аеростатичної шпиндельної опори
Номер патенту: 36956
Опубліковано: 16.04.2001
Автори: Шепелєв Анатолій Олександрович, Зіненко Володимир Миколайович
МПК: B23B 25/00
Мітки: суміщення, вершини, різця, алмазного, пристрій, шпиндельної, аеростатичної, обертання, вала, опори, віссю
Текст:
...такій величині зміщення зміною відстані між плоским провідником 9 і вершиною 13 голки можно нехтувати. Тому вершина 13 і плоский провідник 9 у еквівалентній схемі вважаються нерухомими. Тоді рухомим елементом у еквівалентній схемі вважається алмазний різець (кристал алмаза). Причому, точки задньої грані 15 різця в силу близкості до вершини 13 лежать в області сильного електричної о поля. Отже навіть незначна зміна відстані між точкою на...
Пристрій для установки осі обертання вала шпиндельної опори перпендикулярно оброблюваній плоскій поверхні
Номер патенту: 52409
Опубліковано: 16.12.2002
Автор: Зіненко Володимир Миколайович
МПК: B23B 41/00
Мітки: плоский, обертання, установки, оброблюваній, перпендикулярно, шпиндельної, поверхні, опори, пристрій, вала, осі
Формула / Реферат:
Пристрій для установки осі обертання вала шпиндельної опори перпендикулярно оброблювальній плоскій поверхні, який включає регулювальні гвинти для зміни положення шпиндельної опори, який відрізняється тим, що він обладнаний пристроєм обертання датчика величини проміжку, який включає втулку, до якої шарнірно з можливістю повороту у вертикальній площині прикріплений кронштейн, в кронштейні з можливістю повороту у вертикальній площині, яка...
Пристрій компенсації гіроскопічного моменту обертового елемента, наприклад, вала аеростатичної шпиндельної опори
Номер патенту: 25540
Опубліковано: 30.10.1998
Автори: Зіненко Володимир Миколайович, Шепелев Анатолій Олександрович
МПК: F16C 32/06
Мітки: компенсації, аеростатичної, обертового, пристрій, гіроскопічного, опори, вала, елемента, шпиндельної, наприклад, моменту
Формула / Реферат:
1. Устройство компенсации гироскопического момента вращающегося элемента, например, вала аэростатической шпиндельной опоры, содержащее датчики величины смещения оси вращающегося элемента по оси "X" и по оси "Y", измерители величины смещения оси вращения вращающегося элемента по оси "X" и по оси "Y", объединенные в группы по меньшей мере из двух, регуляторы давления, образующие компенсаторы смещения оси...
Попередній патент: Малогабаритна напівавтоматична прецизійна ділильна головка
Наступний патент: Пристрій адаптивної компенсації активних шумових завад
Випадковий патент: Седативний лікувально-профілактичний засіб