Суперпрецизійна лінійна напрямна


Формула / Реферат
Суперпрецизійна лінійна напрямна, яка включає рухомий елемент несучої плоскої опори, основи несучої плоскої опори, рухомий елемент замикаючої плоскої опори, основи замикаючої плоскої опори, датчики величин зазорів, блоки датчиків лінійного переміщення рухомого елемента замикаючої плоскої опори, блок стабілізації положення рухомого елемента несучої плоскої опори, блок стабілізації лінійного переміщення рухомого елемента замикаючої плоскої опори, яка відрізняється тим, що рухомий елемент несучої плоскої опори шарнірно зв'язаний з рухомим елементом замикаючої плоскої опори, а на одній з основ плоскої несучої опори установлено М датчиків величин зазорів, які утворюють поле датчиків величин зазорів, причому основи датчиків величин зазорів із скінченою точністю суміщені з площиною основи несучої плоскої опори, а самі датчики величин зазорів рівномірно розподілені по полю датчиків величин зазорів, при цьому центри основ трьох датчиків величин зазорів жодного з ![]() поєднань датчиків величин зазорів не лежать на одній прямій, а прямі, які проведені через центри основ трьох датчиків кожного з
поєднань датчиків величин зазорів не лежать на одній прямій, а прямі, які проведені через центри основ трьох датчиків кожного з ![]() поєднань датчиків величин зазорів перетинаються під кутом, який ≠ 90º, п'єзоелектричні регулятори положення рухомого елемента несучої плоскої опори попарно і навпроти один одного установлені на обох основах несучої плоскої опори, причому на основах несучої плоскої опори установлено не менше як три пари п'єзоелектричних регуляторів положення цього рухомого елемента, а кожна пара п'єзоелектричних регуляторів положення рухомого елемента включає один жорсткий і один пружний п'єзоелектричний регулятор положення рухомого елемента, причому пружний регулятор положення рухомого елемента виконаний з можливістю регулювання сили тиску ролика регулятора на поверхню рухомого елемента і включає ролик, установлений на двох радіальних підшипниках, установлених на осі ролика у корпусі ролика, пружину, установлену між корпусом ролика і напрямною втулкою, а між напрямною втулкою і регулювальним гвинтом, вкрученим в кришку корпуса регулятора положення рухомого елемента, установлений п‘єзостовп регулятора положення, а у безпосередній близькості від регуляторів положення рухомого елемента установлені датчики величин зазорів стабілізації положення рухомого елемента несучої плоскої опори, кількість яких дорівнює кількості пар регуляторів положення рухомого елемента, причому датчики величин зазорів стабілізації положення рухомого елемента несучої плоскої опори відносно поверхні рухомого елемента установлені з зазорами, які в 10-100 разів менше зазорів під датчиками величин зазорів поля датчиків, а датчики величин зазорів поля датчиків об'єднані в групи датчиків величин зазорів по числу датчиків величин зазорів стабілізації положення рухомого елемента, датчики величин зазорів поля датчиків і датчики величин зазорів стабілізації положення рухомого елемента несучої плоскої опори електрично через блок стабілізації положення рухомого елемента несучої плоскої опори зв'язані з регуляторами положення рухомого елемента, в основі замикаючої плоскої опори по лініях, паралельних напрямку переміщення рухомого елемента, установлені три блоки датчиків лінійного переміщення рухомого елемента замикаючої плоскої опори, а по лінії, яка паралельна лінії, по якій перетинаються площини симетрії рухомих елементів несучої і замикаючої плоских опор при їх взаємно перпендикулярному положенні, установлені датчики величин зазорів стабілізації лінійного переміщення рухомого елемента замикаючої плоскої опори, причому основи датчиків величин зазорів блоків датчиків лінійного переміщення рухомого елемента замикаючої плоскої опори установлені в одній площині, а датчики величин зазорів стабілізації відносно поверхні рухомого елемента замикаючої плоскої опори установлені з зазорами, які в 10-100 разів менше зазорів під датчиками величин зазорів блоків датчиків лінійного переміщення рухомого елемента замикаючої плоскої опори, п'єзоелектричні регулятори положення рухомого елемента замикаючої плоскої опори попарно і навпроти один одного установлені на обох основах замикаючої плоскої опори, причому кожна з чотирьох пар п'єзоелектричних регуляторів положення рухомого елемента включає один жорсткий і один пружний п'єзоелектричний регулятор положення рухомого елемента, у поперечному напрямку силове замикання рухомого елемента замикаючої плоскої опори забезпечують жорсткі і пружні обмежувачі поперечного зміщення рухомого елемента замикаючої плоскої опори, причому обмежувачі поперечного зміщення рухомого елемента установлені попарно і навпроти один одного, а кожна пара обмежувачів поперечного зміщення рухомого елемента включає жорсткий і пружний обмежувачі поперечного зміщення, причому жорсткий обмежувач поперечного зміщення включає ролик, установлений у корпусі ролика, і регулювальний гвинт, укручений у корпус обмежувача поперечного зміщення, а пружний обмежувач поперечного зміщення виконаний з можливістю регулювання сили тиску ролика обмежувача поперечного зміщення на бокову грань рухомого елемента замикаючої плоскої опори і додатково включає пружину, установлену між корпусом ролика і регулювальним гвинтом, датчики величин зазорів блоків датчиків лінійного переміщення рухомого елемента і датчики величин зазорів стабілізації лінійного переміщення рухомого елемента замикаючої плоскої опори через блок стабілізації лінійного переміщення рухомого елемента замикаючої плоскої опори електрично зв'язані з п'єзоелектричними регуляторами положення рухомого елемента, причому датчики величин зазорів першої групи датчиків величин зазорів і перший датчик величин зазорів стабілізації положення рухомого елемента несучої плоскої опори, датчики величин зазорів другої групи датчиків величин зазорів і другий датчик величин зазорів стабілізації положення рухомого елемента несучої плоскої опори, датчики величин зазорів третьої групи датчиків величин зазорів і третій датчик величин зазорів стабілізації рухомого елемента несучої плоскої опори, датчики величин зазорів четвертої групи датчиків величин зазорів і четвертий датчик величин зазорів стабілізації рухомої елемента несучої плоскої опори з'єднані з інформаційними входами відповідних комутаторів датчиків величин зазорів несучої плоскої опори, сигнальні входи комутаторів датчиків величин зазорів несучої плоскої опори з'єднані з виходами цифрового блока, а їх виходи з'єднані з входами вимірювачів величин зазорів несучої плоскої опори, відповідно, виходи вимірювачів величин зазорів несучої плоскої опори з'єднані з входами цифрового блока і через перемикач "увімкнено - вимкнено" з‘єднані з першими входами відповідних диференційних підсилювачів, датчик величини лінійного переміщення рухомих елементів з'єднаний з входом вимірювача величини лінійного переміщення рухомих елементів, вихід вимірювача величини лінійного переміщення рухомих елементів з'єднаний з входом цифрового блока, а його вхід з'єднаний з виходом цифрового блока, входи операційних підсилювачів з'єднані з виходами цифрового блока, а їх виходи через перемикачі "більше - вимкнено - менше" з'єднані з першими і другими входами відповідних диференційних підсилювачів, виходи цифрового блока через перемикачі "увімкнено – вимкнено” з'єднані з другими входами відповідних диференційних підсилювачів, виходи диференційних підсилювачів з'єднані з п'єзостовпами відповідних пар регуляторів положення рухомого елемента несучої плоскої опори, перші і другі датчики величин зазорів блоків датчиків лінійного переміщення рухомого елемента замикаючої плоскої опори і датчики величин зазорів стабілізації лінійного переміщення рухомого елемента замикаючої плоскої опори з'єднані з інформаційними входами відповідних комутаторів датчиків величин зазорів замикаючої плоскої опори, сигнальні входи комутаторів датчиків величин зазорів замикаючої плоскої опори з'єднані з виходами цифрового блока, а їх виходи з'єднані з входами вимірювачів величин зазорів замикаючої плоскої опори, виходи вимірювачів величин зазорів замикаючої плоскої опори з'єднані з входами цифрового блока і через перемикачі "увімкнено - вимкнено" з'єднані з другими входами відповідних диференційних підсилювачів, виходи цифрового блока з'єднані з входами операційних підсилювачів і через перемикачі "увімкнено - вимкнено" з'єднані з першими входами відповідних диференційних підсилювачів, виходи операційних підсилювачів через перемикачі "більше - вимкнено - менше" з'єднані з першими і другими входами відповідних диференційних підсилювачів, виходи диференційних підсилювачів з'єднані з п'єзостовпами відповідних пар регуляторів положення рухомого елемента замикаючої плоскої опори.
поєднань датчиків величин зазорів перетинаються під кутом, який ≠ 90º, п'єзоелектричні регулятори положення рухомого елемента несучої плоскої опори попарно і навпроти один одного установлені на обох основах несучої плоскої опори, причому на основах несучої плоскої опори установлено не менше як три пари п'єзоелектричних регуляторів положення цього рухомого елемента, а кожна пара п'єзоелектричних регуляторів положення рухомого елемента включає один жорсткий і один пружний п'єзоелектричний регулятор положення рухомого елемента, причому пружний регулятор положення рухомого елемента виконаний з можливістю регулювання сили тиску ролика регулятора на поверхню рухомого елемента і включає ролик, установлений на двох радіальних підшипниках, установлених на осі ролика у корпусі ролика, пружину, установлену між корпусом ролика і напрямною втулкою, а між напрямною втулкою і регулювальним гвинтом, вкрученим в кришку корпуса регулятора положення рухомого елемента, установлений п‘єзостовп регулятора положення, а у безпосередній близькості від регуляторів положення рухомого елемента установлені датчики величин зазорів стабілізації положення рухомого елемента несучої плоскої опори, кількість яких дорівнює кількості пар регуляторів положення рухомого елемента, причому датчики величин зазорів стабілізації положення рухомого елемента несучої плоскої опори відносно поверхні рухомого елемента установлені з зазорами, які в 10-100 разів менше зазорів під датчиками величин зазорів поля датчиків, а датчики величин зазорів поля датчиків об'єднані в групи датчиків величин зазорів по числу датчиків величин зазорів стабілізації положення рухомого елемента, датчики величин зазорів поля датчиків і датчики величин зазорів стабілізації положення рухомого елемента несучої плоскої опори електрично через блок стабілізації положення рухомого елемента несучої плоскої опори зв'язані з регуляторами положення рухомого елемента, в основі замикаючої плоскої опори по лініях, паралельних напрямку переміщення рухомого елемента, установлені три блоки датчиків лінійного переміщення рухомого елемента замикаючої плоскої опори, а по лінії, яка паралельна лінії, по якій перетинаються площини симетрії рухомих елементів несучої і замикаючої плоских опор при їх взаємно перпендикулярному положенні, установлені датчики величин зазорів стабілізації лінійного переміщення рухомого елемента замикаючої плоскої опори, причому основи датчиків величин зазорів блоків датчиків лінійного переміщення рухомого елемента замикаючої плоскої опори установлені в одній площині, а датчики величин зазорів стабілізації відносно поверхні рухомого елемента замикаючої плоскої опори установлені з зазорами, які в 10-100 разів менше зазорів під датчиками величин зазорів блоків датчиків лінійного переміщення рухомого елемента замикаючої плоскої опори, п'єзоелектричні регулятори положення рухомого елемента замикаючої плоскої опори попарно і навпроти один одного установлені на обох основах замикаючої плоскої опори, причому кожна з чотирьох пар п'єзоелектричних регуляторів положення рухомого елемента включає один жорсткий і один пружний п'єзоелектричний регулятор положення рухомого елемента, у поперечному напрямку силове замикання рухомого елемента замикаючої плоскої опори забезпечують жорсткі і пружні обмежувачі поперечного зміщення рухомого елемента замикаючої плоскої опори, причому обмежувачі поперечного зміщення рухомого елемента установлені попарно і навпроти один одного, а кожна пара обмежувачів поперечного зміщення рухомого елемента включає жорсткий і пружний обмежувачі поперечного зміщення, причому жорсткий обмежувач поперечного зміщення включає ролик, установлений у корпусі ролика, і регулювальний гвинт, укручений у корпус обмежувача поперечного зміщення, а пружний обмежувач поперечного зміщення виконаний з можливістю регулювання сили тиску ролика обмежувача поперечного зміщення на бокову грань рухомого елемента замикаючої плоскої опори і додатково включає пружину, установлену між корпусом ролика і регулювальним гвинтом, датчики величин зазорів блоків датчиків лінійного переміщення рухомого елемента і датчики величин зазорів стабілізації лінійного переміщення рухомого елемента замикаючої плоскої опори через блок стабілізації лінійного переміщення рухомого елемента замикаючої плоскої опори електрично зв'язані з п'єзоелектричними регуляторами положення рухомого елемента, причому датчики величин зазорів першої групи датчиків величин зазорів і перший датчик величин зазорів стабілізації положення рухомого елемента несучої плоскої опори, датчики величин зазорів другої групи датчиків величин зазорів і другий датчик величин зазорів стабілізації положення рухомого елемента несучої плоскої опори, датчики величин зазорів третьої групи датчиків величин зазорів і третій датчик величин зазорів стабілізації рухомого елемента несучої плоскої опори, датчики величин зазорів четвертої групи датчиків величин зазорів і четвертий датчик величин зазорів стабілізації рухомої елемента несучої плоскої опори з'єднані з інформаційними входами відповідних комутаторів датчиків величин зазорів несучої плоскої опори, сигнальні входи комутаторів датчиків величин зазорів несучої плоскої опори з'єднані з виходами цифрового блока, а їх виходи з'єднані з входами вимірювачів величин зазорів несучої плоскої опори, відповідно, виходи вимірювачів величин зазорів несучої плоскої опори з'єднані з входами цифрового блока і через перемикач "увімкнено - вимкнено" з‘єднані з першими входами відповідних диференційних підсилювачів, датчик величини лінійного переміщення рухомих елементів з'єднаний з входом вимірювача величини лінійного переміщення рухомих елементів, вихід вимірювача величини лінійного переміщення рухомих елементів з'єднаний з входом цифрового блока, а його вхід з'єднаний з виходом цифрового блока, входи операційних підсилювачів з'єднані з виходами цифрового блока, а їх виходи через перемикачі "більше - вимкнено - менше" з'єднані з першими і другими входами відповідних диференційних підсилювачів, виходи цифрового блока через перемикачі "увімкнено – вимкнено” з'єднані з другими входами відповідних диференційних підсилювачів, виходи диференційних підсилювачів з'єднані з п'єзостовпами відповідних пар регуляторів положення рухомого елемента несучої плоскої опори, перші і другі датчики величин зазорів блоків датчиків лінійного переміщення рухомого елемента замикаючої плоскої опори і датчики величин зазорів стабілізації лінійного переміщення рухомого елемента замикаючої плоскої опори з'єднані з інформаційними входами відповідних комутаторів датчиків величин зазорів замикаючої плоскої опори, сигнальні входи комутаторів датчиків величин зазорів замикаючої плоскої опори з'єднані з виходами цифрового блока, а їх виходи з'єднані з входами вимірювачів величин зазорів замикаючої плоскої опори, виходи вимірювачів величин зазорів замикаючої плоскої опори з'єднані з входами цифрового блока і через перемикачі "увімкнено - вимкнено" з'єднані з другими входами відповідних диференційних підсилювачів, виходи цифрового блока з'єднані з входами операційних підсилювачів і через перемикачі "увімкнено - вимкнено" з'єднані з першими входами відповідних диференційних підсилювачів, виходи операційних підсилювачів через перемикачі "більше - вимкнено - менше" з'єднані з першими і другими входами відповідних диференційних підсилювачів, виходи диференційних підсилювачів з'єднані з п'єзостовпами відповідних пар регуляторів положення рухомого елемента замикаючої плоскої опори.
Текст
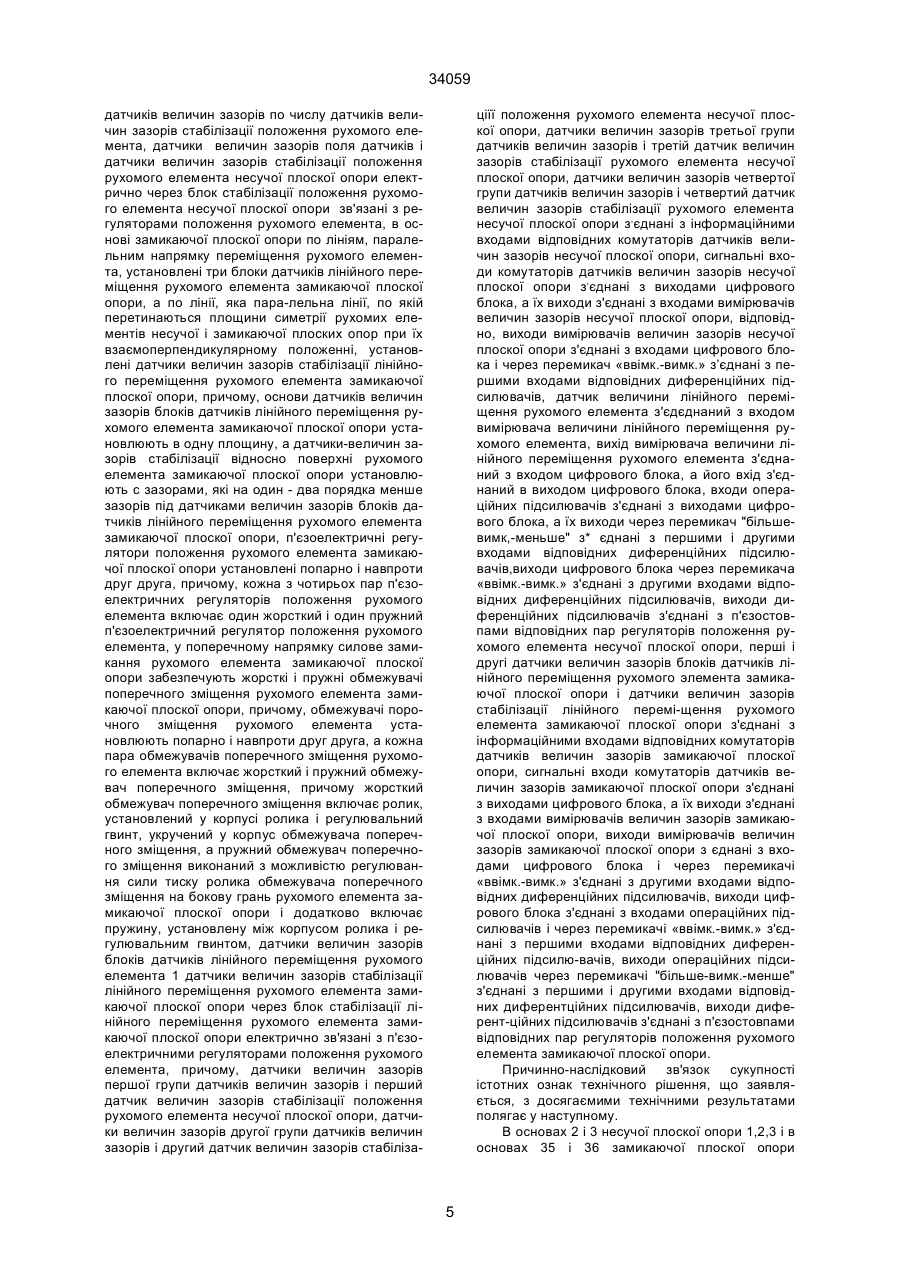
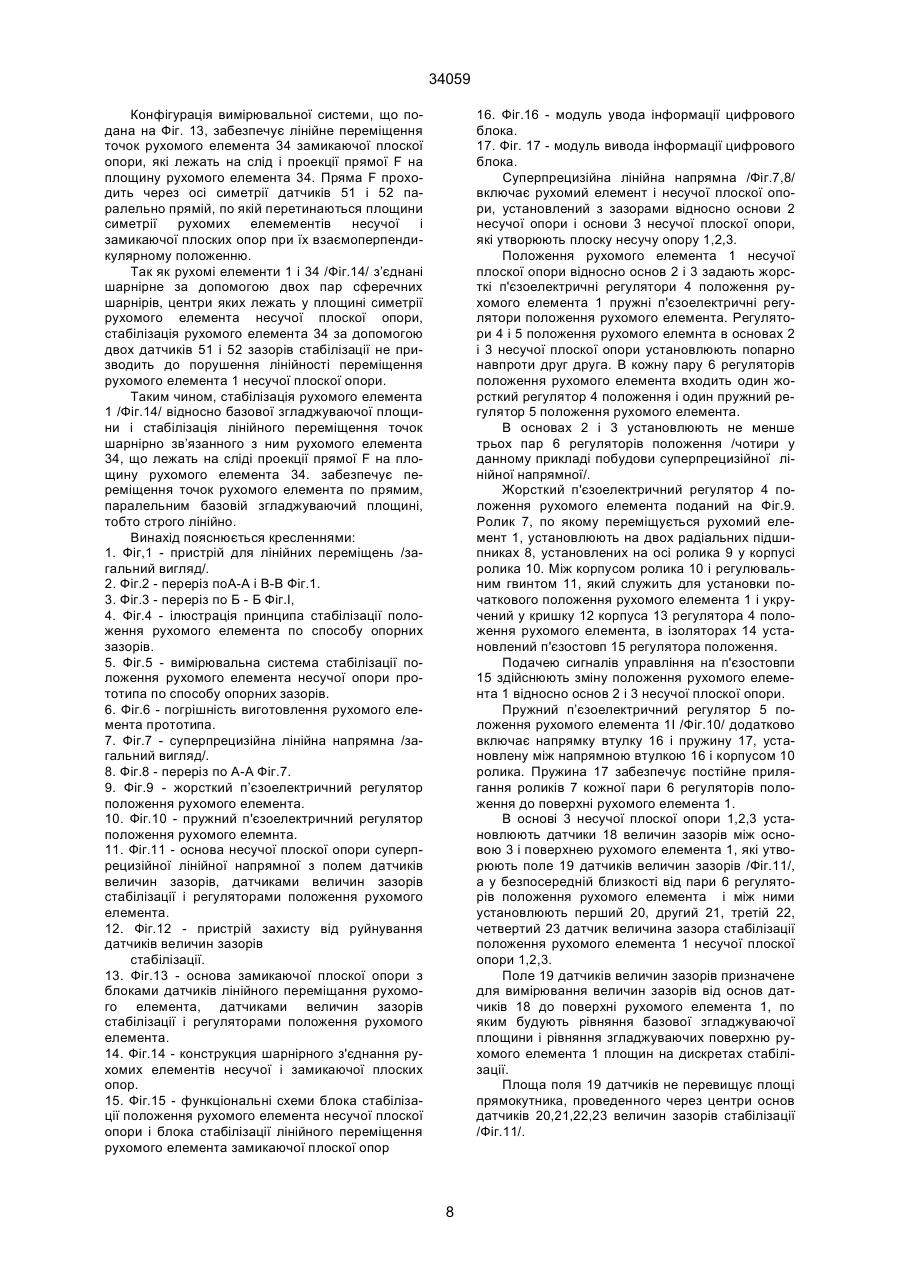
Суперпрвцизійна лінійна напрямна,яка включає рухомий елемент несучої плоскої опори, основи несучої плоскої опори, рухомий елемент замикаючої плоскої опори, основи замикаючої плоскої опори, датчики величин зазорів, блоки датчиків лінійного переміщення рухомого елемента замикаючої плоскої опори, блок стабілізації положення рухомого елемента несучої плоскої опори, блок стабілізації лінійного переміщення рухомого елемента замикаючої плоскої опори, яка відрізняється тим, що рухомий елемент несучої плоскої опори шарнірно зв'язаний з рухомим елементом замикаючої плоскої опори, а на одній з основ плоскої несучої опори установлено "М" датчиків величин зазорів, які утворюють поле датчиків величин зазорів, причому, основи датчиків величин зазорів з кінцевою точністю суміщені з площиною основи несучої плоскої опори, а самі датчики величин зазорів рівномірно розподілені по полю датчиків величин зазорів, при цьому центри основ трьох датчиків величин зазорів жодного з N= С3М сполучень датчиків величин зазорів не лежать на одній прямій а прямі, які проведені через центри основ трьох датчиків кожного з N= С3М сполучень датчиків величин зазорів не перетинаються під прямим кутом, п'єзоелектричні регулятори положення рухомого елемента несучої плоскої опори попарно і навпроти один одного установлені на обох основах несучої плоскої опори, причому, на основах несучої плоскої опори установлено не менше як три пари п'єзоелектричних регуляторів положення цього рухомого елемента, а кожна пара п'єзоелектричних регуляторів положення рухомого елемента включає один жорсткий і один пружний п'єзоелектричний регулятор положення рухомого елемента, причому, пружний регулятор положення рухомого елемента виконаний з можливістю регулювання сили тиску ролика регулятора на поверхню рухомого елемента 1 включає ролик, установлений на двох радіальних підшипниках, установлених на ОСІ ролика у корпусі ролика, пружину, установлену між корпусом ролика і напрямною втулкою, а між напрямною втулкою і регулювальним А (54) СУПЕРПРЕЦИЗІЙНА ЛІНІЙНА НАПРЯМНА 34059 ку силове замикання рухомого елемента замикаючої плоскої опри забезпечують жорсткі і пружні обмежувачі поперечного зміщення рухомого елемента замикаючої плоскої опори, причому, обмежувачі поперечного зміщення рухомого елемента установлено попарно і навпроти один одного, а кожна пара обмежувачів поперечного зміщення рухомого елемента включає жорсткий і пружний обмежувач поперечного зміщення, причому, жорсткий обмежувач поперечного зміщення включає ролик, установлений у корпусі ролика і регулювальний гвинт укручений у корпус обмежувача поперечного зміщення, а пружний обмежувач поперечного зміщення виконаний з можливістю регулювання сили тиску ролика обмежувача поперечного зміщення на бокову грань рухомого елемента замикаючої плоскої опори і додатково включає пружину, установлену між корпусом ролика і регулювальним гвинтом, датчики величин зазорів блоків датчиків лінійного переміщення рухомого елемента 1 датчики величин зазорів стабілізації лінійного переміщення рухомого елемента замикаючої плоскої опори через блок стабілізації лінійного переміщення рухомого елемента замикаючої плоскої опори електрично зв’язані з п'єзоелектричними регуляторами положення рухомого елемента, причому, датчикив величин зазорів першої групи датчиків величин зазорів і перший датчик величин зазорів стабілізації положення рухомого елемента несучої плоскої опори, датчики величин зазорів другої групи датчиків величин зазорів і другий датчик величин зазорів стабілізації положення рухомого елемента несучої плоскої опори, датчики величин зазорів третьої групи датчиків величин зазорів і третій датчик величин зазорів стабілізації рухомого елемента несучої плоскої опори, датчики величин зазорів четвертої групи датчиків величин зазорів і четвертий датчик величин зазорів стабілізації рухомого елемента несучої плоскої опори з,єднані з інформаційними входами відповідних комутаторів датчиків величин зазорів несучої плоскої опори, сигнальні входи комутаторів датчиків величин зазорів несучої плоскої опорі з’єднані з виходами цифрового блока, а їх виходи з'єднані з входами вимірювачів величин зазорів несучої плоскої опори, відповідно, виходи вимірювачів величин зазорів несучої плоскої опори з'єднані з входами цифрового блока і через перемикач «ввімк.-вимк.» з'єднані з першими входами відповідних диференційних підсилювачів, датчик величини лінійного переміщення рухомих елементів з'єднаний з входом вимірювача величини лінійного переміщення рухомих елементів, вихід вимірювача величини лінійного переміщення рухомих елементів з'єднаний з входом цифрового блока, а його вхід з'єднаний з виходом цифрового блока, входи операційних підсилювачів з'єднані з виходами цифрового блока, а їх виходи через перемикачі "більше-вимк.-менше" з'єднані з першими і другими входами відповідних диференційних підсилювачів, виходи цифрового блока через перемикачі «ввімк.-вимк.» з'єднані з другими входами відповідних диференційних підсилювачів, виходи диференційних підсилювачів з'єднані з п'єзо-стовпами відповідних пар регуляторів положення рухомого елемента несучої плоскої опори, перші і другі датчики величин зазорів блоків датчиків лінійного переміщення рухомого елемента замикаючої плоскої опори і датчики величин зазорів стабілізації лінійного переміщення рухомого елемента замикаючої плоскої опори з'єднані з інформаційними входами відповідних комутаторів датчиків величин зазорів замикаючої плоскої опори, сигнальні входи комутаторів датчиків величин зазорів замикаючої плоскої опори з'єднані з виходами цифрового блока, а їх виходи з'єднані з входами вимірювачів величин зазорів замикаючої плоскої опори, виходи вимірювачів величин зазорів замикаючої плоскої опори з'єднані з входами цифрового блока і через перемикача «ввімк.вимк.» з'єднані з другими входами відповідних диференційних підсилювачів, виходи цифрового блока з'єднані з входами операційних підсилювачів і через перемикачі «ввімк.-вимк.» з'єднані з першими входами відпо-відних диференційних підсилювачв, виходи опера-ційних підсилювачів через перемикачі "більше-вимк.менше" з'єднані з першими і другими входами відповідних диференційних підсилювачів, виходи диференційних підсилювачів з'єднані з п'єзостовпами відповідних пар регуляторів положення рухомого елемента замикаючої плоскої опори. Винахід стосується верстатобудування і може бути використаний при конструюванні прецизійних верстатів і, зокрема, при конструюванні верстатів застосовуємих в машинобудівних і інструментальних виробництвах для обробки плоских поверхнонь особливо високої точності. Відомий"Пристрій для лінійних переміщень" використовуємий для лінійних перемщень елементів формоутворюючих систем прецизійних верстатів, розкритий у патенті України № 14904А від 04.03,97р., який є найбільш близьким по технічнїй суті до технічного рішення, що заявляється. Загальний вигляд пристрою прототипа поданий на Фіг.1, а його перерізи по А-А і В-В подані на Фіг.2 і Фіг.З. Пристрій включає рухомий елемент 88, який розміщений між основами 2, 3, 35, 36 пристрою з зазорами 91 між гранями рухомого елемента 88 і цими основами. В кожній основі виконані жиклери 89 для подачи газу у зазори 91. Основи 2, 3 і прилеглі до них грані рухомого елемента 88 утворюють несучу плоску аеростатичну опору, а основи 35, 36 і прилеглі до цих основ грані рухомого елемента 88 утворюють замикаючу плоску аеростатичну опору. В основі 3 несучої плоскої аеростатичної опори установлені чотири блока90 датчиків положення рухомого елемента цієї опори /Фіг.4, 5/. Кожний блок 90 датчиків положення включає перший датчик 92 величини зазора і другий датчик 93 величини зазора. Відстань між цент-рами основ датчиків 92 і 93 у кожному блоку 90 2 34059 датчиків положення рівні між собою і рівні дискреті "l" стабілізації положення рухомого елемента 88. Блоки 90 датчиків положення в основі 3 установлені так, що основи датчиків 92 і 93 величин зазорів усіх блоків 90 датчиків лежать в одній площині, а прямі, проведені через центри основ датчиків 92 і 93 кожного блока 90 датчиків паралельні напрямку переміщення рухомого елемента 88. В основі 2 навпроти блоків 90 датчиків установлені жорсткі п’єзоелектричні регулятори 4 положення рухомого елемента 88. В основі 36 замикаючої плоскої аеростатичної опори установлені два блока 46 і 47 датчиків лінійного переміщення рухомого елемента 88, в кожному з яких установлений перший датчик 49 величини зазора і другий датчик 50 величини зазора. Блоки 46 і 47 датчиків лінійного переміщення рухомого елемента 88 установлюють так, що основи датчиків 49 і 50 обох блоків датчиків 46 і 47 лежать в одній площині, а пряма, яка проходить через центри основ датчиків 49 і 50 блоків 46 і 47 датчиків, паралельна напрямку переміщення рухомого елемента 88. Блоки 46 і 47 датчиків лінійного переміщення установлюються симетрично відносно бокових сторін основи 36. Відстань між центрами основ датчиків 49 і 50 в блоках 46 і 47 датчиків також рівніміж собою і рівні дискреті "l" стабілізації положення рухомого элемента 88. В основі 35 замикаючої плоскої аеростатичної опори навпроти блоків датчиків лінійного переміщення рухомого елемента 88 установлені жорсткі п'єзоелектричні регулятори лінійності переміщення рухомого елемента 88. Вимірювання величини лінійного переміщення рухомого елемента 88 здійснюється за допомогою лінійного індуктосина, вимірювальна лінійка 61 якого /Фіг.1/ установлена на основі 2, а вимірювальна голівка 87 установлена на рухомому елементі 88. Стабілізація положення рухомого елемента 88 полягає у тому, що на дискретах стабілізації відстані від будь яких трьох точок рухомого елемента 88 до нерухомої у просторі площини "Р" /Фіг.4/, паралельній площині установки основ датчиків 92 і 93 блоків 90 датчиків, залишаються незмінними і здійснюється по способу опорних зазорів. Суть стабілізації положення рухомого елемента 88 полягає у наступному. Зафіксуємо положення рухомого елемента 88 і приймемо це положення у якості вихідного для переміщення рухомого елемента 88 у вказаному на /Фіг.4/ напрямку. У вихідному положенні рухомого елемента 88 вимірюють величини зазорів Zі2 під другими датчиками 93 кожного і-го блока датчиків і залам,ятовують їх у якості опорних Zі2on (O) зазорів / і=1, 2, 3, 4 у данному прикладі/. Нехай також відстані від точок Аі поверхні рухомого елемента 88, розташованих над центрами основ других датчиків 93 кожного і -го блока датчиків до нерухомої площини "Р" відповідно рівнів аі(O)/ i=1,4/. Переміщують рухомий елемент 88 управо /Фіг.4/ на відстань, рівну дискреті стабілізації "l". У загальному випадку рухомий елемент 88 після переміщення на відстань "l" буде займати відносно основ датчиків 92 і 93 випадкове положення. Зміщують рухомий елемент 88 по висоті зазора і встановлюють під першими датчиками 92 величин, зазорів зазори Zi1(1), pівні відповідним величинам опорних зазорів Zі2on (O): Z11(1)= Z12on (O), Z21(1)= Z22on (O), Z31(1)= Z32on (O),Z41(1)= Z42on (O). Так як після переміщення рухомого елемента 88 з вихідного положення на відстань "l" точки Аi /i =1,2,3,4/рухомого елемента /Фіг.4/ розташувались над центрами основ перших датчиків 92, після установки під першими датчиками 92 величин зазорів, рівних величинам відповідних опорних зазорів, відстані аі(1) від цих точок до базової площини "Р" будуть рівні відповідним відстаням аі(о) від цих точок до площини "Р" у вихідному положенні рухомого елемента 88: а1(1)=а1(0),а2(1)=а2(0),а3(1)=а3(0),а4(1)=а4(0), Отже після переміщення рухомого елемента 88 на відстань "l" і виконання описанних дій відстані від точок А1,А2,А3,А4, до базової площини "P" не змінилися. Після першого переміщення рухомого елемента 88 на відстань "l" і установки під першими датчиками 92 величин зазорів, рівних опорним, вимірюють величини зазорів Z12(1), Z22(1), Z32(1), Z42(1), під другими датчиками і запам,ятовують їх у якості опорних зазорів Z12on(1),Z22on (1), Z32on(1),Z42on (1), для установки рухомого елемента 88 у незбурене положення після його другого переміщення на відстань "l". Описану процедуру з дискретністю "l" виконують до переміщення рухомого елемента 88 на задану відстань "L". Отримують масив опорних зазорів [Z12on(0),Z22on(0),Z32on(0),Z42on(0)], [Z12on(1),Z22on (1), Z32on(1),Z42on (1)], [Z12on(j),Z22on(j),Z32on(j),Z42on(j)],(j≥ L ), l відповідаючих незбуреному положенню рухомого елемента 88 на диcкретах стабілізації j.l/j=1,2,3,........j/. В процесі стабілізації положення рухомого елемента 88 на кожній j-ій диcкреті стабілізації порівнюють поточні значення величин зазорів під другими датчиками 93 Z12(t), Z22 (t), Z32(t), Z42(t) з величинами відповідних опорних зазорів Z12on(j1),Z22on (j-1), Z32on(j-1), Z42on (j-1) для j-ої дискрети стабілізації. При відхиленні згаданих поточних значень величин зазорів під другими датчиками від відповідних опорних змінюють положення рухомого елемента 88так, щоб відхилення Zi2on(j-1)Zi2on(t)= Zi→O, а отже запобігають зміщенню рухомого елемента 88 відносно площини "Р". По способу опорних зазорів також забезпечується переміщення точок грані рухомого елемента 88 , що лежать на cліді проекції прямої F , яка проходить крізь центри основ датчиків 49 блоків 46 і 47 датчиків /Фіг, 1/, на цю грань по прямим, паралельних прямій F . У результаті забезпечується лінійне переміщення рухомого елемента 88 пристрою. Недоліками стабілізації рухомого елемента 88 по способу опорних зазорів являється те, що: 3 34059 1. Погрішність стабілізації рухомого елемента 88 залежить від величини "l" дискрети стабілізації і на j -ій диокреті стабілізації визначається величинами різниць, опорних зазорів на суміжних дискретах стабілізації: ∆Zi2on(j)=Zi2on (j) - Zi2on(j-1). Причому, величина диcкрети "l" рівна відстані між центрами основ датчиків /Фіг.4/ і тому завжди l >Dd , де Dd - діаметр основи датчика. що обмежує точність способа. 2. Реалізація способа опорних зазорів вимагає встановлення основ датчиків в площині, паралельній площині "Р" з особливо високою точністю. У противному разі на кожній відстані переміщення рухомого елемента 88 погрішність його положення відносно нерухомої площини "Р" /відхилення точок Аi від площни "Р" / буде збільшуватися на величину погрішності установки основи датчика величини зазора відносно площини установки датчиків. 3. Стабілізація положення рухомого елемента по способу опорних зазорів передбачає високоточне вимірювання величин опорних зазорів, так як погрішність вимірювання величин опорних зазорів на (j-i)-iй дискреті стабілізації корелірована з погрішністю їх вимірювання на j-їй диокреті стабілізації. Конструктивними недоліками пристрою прототипа є наступне. Як відомо, зазор 91 плоскої аеростатичної опори може становити /10-30/ мкм. У пристрої прототипа для забезпечення постійного прилягання рухомого елемента 88 до роликів п'єзоелектричних регуляторів 4 рухомого елемента /Фіг.2/ цей рухомий елемент 88 має початкове зміщення регуляторами 4, встановленими в основі 2 пристрою, у бік основи 3. Причому, величина цього зміщення повинна перевищувати суму h=h1+h2 максимальних відхилень двох точок поверхні рухомого елемента відносно середньоквадратичної площи-ни Q цієї поверхні, які лежать з обох сторін цієї площини Q /Фіг.6/. Тому для збереження допустимої величини зазора 91, наприклад, між основою 3 і граню рухомого елемента 88, кожна з двох протилежних граней рухомого елемента повинна мати обмежену неплощинність, і, крім того, ці грані повинні бути паралельними з високою точністю. Високі вимоги до точності виготовлення рухомого елемента накладають обмеження на їх розміри, а, отже, і на максимальну величину лінійного переміщення рухомого елемента пристрою. Задача, що вирішується, полягає у такому удосконаленню несучої плоскої опори пристрою для лінійних переміщень, яке дозволяє на порядок збільшити зазор між рухомим елементом несучої плоскої опори і її основами і на основі цього знизити вимоги до точності виготовлення елементів її конструкції без зменшення величини переміщення рухомого елемента, а відхилення основ датчиків величин зазорів, встановлених в основі несучої плоскої опори від площини їх установки не призводить до порушення працездатності цієї опори. При цьому досягається підвищення точності стабілізації рухомого елемента несучої плоскої опори відносно нерухомої у просторі площини, що дозволяє обробляти плоскі поверхні з особливо високою точністю. Задача, що вирішується, також полягає у такому удосконаленню замикаючої плоскої опори пристрою для лінійних переміщень, яке також дозволяє на порядок збільшити зазор між рухомим елементом і її основами і на основі цього знизити вимоги до точності виготовлення елементів її конструкції без зниження лінійності переміщення рухомого элемента. Рішення задачі досягається тим, що суперпрецизійна лінійна напрямна, яка включає рухомий елемент плоскої несучої опори, основи плоскої несучої опори, рухомий елемент замикаючої плоскої опори, основи замикаючої плоскої опори, датчики величин зазорів, блоки датчиків лінійного переміщення рухомого еле-мента замикаючої плоскої опори, блок стабілізації положення рухомого елемента несучої плоскої опори, блок стабілізації лінійного переміщення рухомого елемента замикаючої плоскої опори, згідно винаходу, рухомий елемент несучої плоскої опори шарнірно з’єднаний з рухомим елементом замикаючої плоскої опори, а на одній з основ несучої плоскої опори установлена обмежена множина М датчиків величин зазорів, які утворюють поле датчиків величин зазорів, причому, основи датчиків величин зазорів з кінцевою точністю суміщені з площиною основи несучої плоскої опори, а самі датчики величин зазорів рівномірно розподілені по полю датчиків величин зазорів, при цьому центри основ трьох датчиків величин зазорів жодного з N=C3M сполучень датчиків величин зазорів не лежать на одній прямій, а прямі, які проведені через центри основ трьох датчиків кожного з N=C3M , сполучень датчиків величин зазорів не перитинаються під прямим кутом, п'єзоелектричні регулятори положення рухомого елемента несучої плоскої опори попарно і навпроти друг друга установлені на обох основах несучої плоскої опори, причому, на основах плоскої несучої опори установлюють не меньш як три пари регуляторів положення рухомого елемента, а кожна пара п'єзоелектричних регуляторів положення рухомого елемента включає один жорсткий і один пружний п'єзоелектричний регулятор положення рухомого елемента, причому, пружний п'єзоелектричний регулятор положення рухомого елемента виконаний з можливістю регулювання сили тиску ролика регулятора на поверхню рухомого елемента 1 включає ролик, установлений на двох радіальних підшипниках, установлених на осі ролика у корпусі ролика, пружину, установлену між корпусом ролика і напрямною втулкою, а між напрямною втулкою і регулювальним гвинтом, укрученим у кришку корпуса peгулятора положення рухомого елемента установлений п‘єзостовп, у безпосередньої близькості від ругуляторів положення рухомого елемента установлені датчики величин зазорів стабілізації положення рухомого елемента несучої плоскої опори, кількість яких дорівнює кількості пар регуляторів положення рухомого елемента, причому, датчики величин зазорів стабілізації положення рухомого елемента несучої плоскої опори відносно поверхні рухомого елемента установлені з зазорами, які на один - два порядка менші зазорів під датчиками величин зазорів поля датчиків, а датчики величин зазорів поля датчиків об'єднані у групи 4 34059 датчиків величин зазорів по числу датчиків величин зазорів стабілізації положення рухомого елемента, датчики величин зазорів поля датчиків і датчики величин зазорів стабілізації положення рухомого елемента несучої плоскої опори електрично через блок стабілізації положення рухомого елемента несучої плоскої опори зв'язані з регуляторами положення рухомого елемента, в основі замикаючої плоскої опори по лініям, паралельним напрямку переміщення рухомого елемента, установлені три блоки датчиків лінійного переміщення рухомого елемента замикаючої плоскої опори, а по лінії, яка пара-лельна лінії, по якій перетинаються площини симетрії рухомих елементів несучої і замикаючої плоских опор при їх взаємоперпендикулярному положенні, установлені датчики величин зазорів стабілізації лінійного переміщення рухомого елемента замикаючої плоскої опори, причому, основи датчиків величин зазорів блоків датчиків лінійного переміщення рухомого елемента замикаючої плоскої опори установлюють в одну площину, а датчики-величин зазорів стабілізації відносно поверхні рухомого елемента замикаючої плоскої опори установлюють с зазорами, які на один - два порядка менше зазорів під датчиками величин зазорів блоків датчиків лінійного переміщення рухомого елемента замикаючої плоскої опори, п'єзоелектричні регулятори положення рухомого елемента замикаючої плоскої опори установлені попарно і навпроти друг друга, причому, кожна з чотирьох пар п'єзоелектричних регуляторів положення рухомого елемента включає один жорсткий і один пружний п'єзоелектричний регулятор положення рухомого елемента, у поперечному напрямку силове замикання рухомого елемента замикаючої плоскої опори забезпечують жорсткі і пружні обмежувачі поперечного зміщення рухомого елемента замикаючої плоскої опори, причому, обмежувачі порочного зміщення рухомого елемента установлюють попарно і навпроти друг друга, а кожна пара обмежувачів поперечного зміщення рухомого елемента включає жорсткий і пружний обмежувач поперечного зміщення, причому жорсткий обмежувач поперечного зміщення включає ролик, установлений у корпусі ролика і регулювальний гвинт, укручений у корпус обмежувача поперечного зміщення, а пружний обмежувач поперечного зміщення виконаний з можливістю регулювання сили тиску ролика обмежувача поперечного зміщення на бокову грань рухомого елемента замикаючої плоскої опори і додатково включає пружину, установлену між корпусом ролика і регулювальним гвинтом, датчики величин зазорів блоків датчиків лінійного переміщення рухомого елемента 1 датчики величин зазорів стабілізації лінійного переміщення рухомого елемента замикаючої плоскої опори через блок стабілізації лінійного переміщення рухомого елемента замикаючої плоскої опори електрично зв'язані з п'єзоелектричними регуляторами положення рухомого елемента, причому, датчики величин зазорів першої групи датчиків величин зазорів і перший датчик величин зазорів стабілізації положення рухомого елемента несучої плоскої опори, датчики величин зазорів другої групи датчиків величин зазорів і другий датчик величин зазорів стабіліза ціїї положення рухомого елемента несучої плоскої опори, датчики величин зазорів третьої групи датчиків величин зазорів і третій датчик величин зазорів стабілізації рухомого елемента несучої плоскої опори, датчики величин зазорів четвертої групи датчиків величин зазорів і четвертий датчик величин зазорів стабілізації рухомого елемента несучої плоскої опори з,єднані з інформаційними входами відповідних комутаторів датчиків величин зазорів несучої плоскої опори, сигнальні входи комутаторів датчиків величин зазорів несучої плоскої опори з,єднані з виходами цифрового блока, а їх виходи з'єднані з входами вимірювачів величин зазорів несучої плоскої опори, відповідно, виходи вимірювачів величин зазорів несучої плоскої опори з'єднані з входами цифрового блока і через перемикач «ввімк.-вимк.» з’єднані з першими входами відповідних диференційних підсилювачів, датчик величини лінійного переміщення рухомого елемента з'єдєднаний з входом вимірювача величини лінійного переміщення рухомого елемента, вихід вимірювача величини лінійного переміщення рухомого елемента з'єднаний з входом цифрового блока, а його вхід з'єднаний в виходом цифрового блока, входи операційних підсилювачів з'єднані з виходами цифрового блока, а їх виходи через перемикач "більшевимк,-меньше" з* єднані з першими і другими входами відповідних диференційних підсилювачів,виходи цифрового блока через перемикача «ввімк.-вимк.» з'єднані з другими входами відповідних диференційних підсилювачів, виходи диференційних підсилювачів з'єднані з п'єзостовпами відповідних пар регуляторів положення рухомого елемента несучої плоскої опори, перші і другі датчики величин зазорів блоків датчиків лінійного переміщення рухомого элемента замикаючої плоскої опори і датчики величин зазорів стабілізації лінійного перемі-щення рухомого елемента замикаючої плоскої опори з'єднані з інформаційними входами відповідних комутаторів датчиків величин зазорів замикаючої плоскої опори, сигнальні входи комутаторів датчиків величин зазорів замикаючої плоскої опори з'єднані з виходами цифрового блока, а їх виходи з'єднані з входами вимірювачів величин зазорів замикаючої плоскої опори, виходи вимірювачів величин зазорів замикаючої плоскої опори з єднані з входами цифрового блока і через перемикачі «ввімк.-вимк.» з'єднані з другими входами відповідних диференційних підсилювачів, виходи цифрового блока з'єднані з входами операційних підсилювачів і через перемикачі «ввімк.-вимк.» з'єднані з першими входами відповідних диференційних підсилю-вачів, виходи операційних підсилювачів через перемикачі "більше-вимк.-менше" з'єднані з першими і другими входами відповідних диферентційних підсилювачів, виходи диферент-ційних підсилювачів з'єднані з п'єзостовпами відповідних пар регуляторів положення рухомого елемента замикаючої плоскої опори. Причинно-наcлідковий зв'язок сукупності істотних ознак технічного рішення, що заявляється, з досягаємими технічними результатами полягає у наступному. В основах 2 і 3 несучої плоскої опори 1,2,3 і в основах 35 і 36 замикаючої плоскої опори 5 34059 ~ ~ u1 = C(Za - Zb ); u2 = C(Za -Zg ); k = 1,2; i = 1, 2; j = 1,2. 34,35,36 /Фіг.7,8/ установлені попарно і навпроти друг друга жорсткі /Фіг.9/ і пружні /Фіг.10/ регулятори 4,5 положення рухомих елементів 1 і 34 несучої і замикаючої плоских опор, відповідно. Сумістим площину ХОУ системи координат ОХУZ /Фіг.11/ з внутрішньою плоскістю основи 3, її початок розташуємо у центрі основи 3, вісь "У" співпадає з напрямком переміщення рухомого елемента 1, а вісь "Z" спрямована по висоті зазора. Нехай також в основі 3 несучої плоскої опори установлено "М" датчиків 18 величин зазорів /Фіг.11/, які утворюють поле 19 датчиків, причому, датчики 18 рівномірно розподілені по полю 19 датчиків, а їх основи з кінцевою точністю суміщені з площиною ХОУ системи координат OXYZ xm , ym - координати центра основи m -го датчика 18 величина зазора /m = 1,2,3,...,M /. Тоді координати точки поверхні рухомого елемента під m -им датчиком величини зазора - /xm, ym ,zm /, де zm висота зазора під m -им датчиком. Установим, рухомий елемент 1 в середнє по довжині переміщення положення, для чого змістим його із вихідного для переміщення положення /L =0/ на величину L /2, ДЕ L - задана величина лінійного переміщення рухомого елемента суперпрецизійної лінійної напрямної. Виміряєм величини зазорів під "М" датчиками 18 поля 19 датчиків-; Z1, Z2, Z3,...,Z α,... Zβ,...Zγ,...Zм. (1) Система рівнянь для визначення коефіцієнтів А і В рівняння площини AX+BY+CZ+D=O , яка проходить через три точки поверхні рухомого елемента з координатами (xα,yα,zα), (xβ,yβ,zβ), (xγ,yγ,zγ) має вигляд: A(xα -xβ)+B(yα -yβ)=-C(zα -zβ), A(xα -xγ)+B(yα -yγ)=-С(zα -zγ) . (2) де С - довільно вибрана величина проекції нормального вектора до площини, яка проходить крізь згадані три точки поверхні рухомого елемента, на вісь Z системи координат ОХУZ; a ¹ b ¹g, 1 £ a £ M , 1 £ b £ M , 1 £ g £ M . Для знаходження нормального рішення системи /2/, стійкого до погрішностей вимірювань величин зазорів za , z b , zg Коефіцієнти в /4/ мають значення: a11=a ×a +a21×a21 a21=a ×a +a22×a21 b =a ×u+a ×u ; (5) ; ; 1 11 ~ 21 ~ 12 11 11 11 2 ~+a ×u. ~ a12=a ×a +a ×a ; a22=a ×a +a ×a ; b =a ×u 11 12 де 3. Для кожного значення Zd = , /k=1,2,3,.../ a a An ( k ) iBn ( k ) . 2 a a ( A n ( k ) ) 2 + ( B n ( k ) )= max . a (6) 3 4. Розв язують N = С M систем рівнянь вигляду /3/ і обчислюють коефіцієнти A Б i B Б базової згладжувагочої поверхню рухомого елемента площини: N AБ = å N å a An a Bn ; B Б = i= 1 N N як середнє значення коефіцієнтів An стемам рівнянь. Тоді рівняння згладжуваючої площини має вигляд: i= 1 A Б × x + B Б × y + C × z + D Б = 0; (7) І Вn по N базової (8) M де DБ = -C × Z ; Z = åZ m=1 M m . Із /8/ виходить, що базова згладжуваюча площина проходить через точку, яка лежить на осі Z системи координат OXYZ на висоті, що дорівнює середній висоті зазора Z під "М" датчиками 18 поля 19 датчиків. Так як N = С3M може приймати значення від кількох тисяч до кількох десятків тисяч, положення базової згладжуваючої площини від нeплощинності окремих ділянок на цій поверхні, величини і місця розташування окремих мікронеpівностей на поверхні рухомого елемента 1 визначається середньою Z висотою зазорів під датчиками 18 величин зазорів і положенням середньої площини поверхні рухомого елемента, що проходить через точки поверхні рухомого елемента 1 /в системі координат OХYZ /. Причому, для того, щоб система /3/ могла бути розв'язана, розміщення датчиків 18 у полі 19 датчиків повинно відповідати наступним умовам, (3) m i =1 ~ = å aik × aij ; bk = å aik × ui ; (m = 2). a = a0 × q , 22 2 У якості нормального рішення /3/ приймають вектор, для якого виконується умова: (a11 +a) × Aa + a12Ba = b1, a21× Aa +(a22 +a)× Ba =b2, i =1 k 12 1 із сітки значень параметра регулярізації "α" об А-квадратна матриця з елементами aij. У розгорнутому вигляді /3/ приймає вигляд: де: akj 2 a = a0 × qk числюють /3/ і получають z -шуканий вектор, ~ u -приблизно заданий вектор, m 22 22 виконуеться в наступній послідовності: І. Призначається значення вільного невідомого "С", яке має одне і теж значення для усіхі N=C3M систем рівнянь /1/. 2. Вибирають початкове значення αо параметра регуляризації i відстань "q" по параметру регуляризації. використовується ме ~ AZ = u ; 12 12 ( xa , ya , za ), ( x b , y b , z b ), ( xg , yg , zg ). , де I £ a £ M , I £ b £ M , I £ g £ M , тод рішення погано обумовлених систем алгебраїчних рівнянь /Тихонов А. Арсенин В. "Методы решения некорректных задач", М., Наука, 1978г./ У відповідності з цим методом система /2/ представляється у вигляді: 21 22 Обчислення коефіцієнтів An І Вn з системи /1/ для n -ої площини з , N=C3M площин, кожна з яких проходить через три точки поверхні рухомого елемента несучої плоскої опори з координатами де q
ДивитисяДодаткова інформація
Назва патенту англійськоюSuper-precision linear guide
Автори англійськоюZinenko Volodymyr Mykolaiovych
Назва патенту російськоюСуперпрецизионная линейная направляющая
Автори російськоюЗиненко Владимир Николаевич
МПК / Мітки
МПК: F16C 32/06
Мітки: лінійна, напрямна, суперпрецизійна
Код посилання
<a href="https://ua.patents.su/24-34059-superprecizijjna-linijjna-napryamna.html" target="_blank" rel="follow" title="База патентів України">Суперпрецизійна лінійна напрямна</a>
Спосіб стабілізації положення рухомого елемента плоскої пружної опори та пристрій для його реалізації

Номер патенту: 41506
Опубліковано: 17.09.2001
Автори: Зіненко Володимир Миколайович, Шепелєв Анатолій Олександрович
МПК: F16C 32/06
Мітки: опори, положення, пружної, спосіб, пристрій, елемента, рухомого, реалізації, плоскої, стабілізації
Формула / Реферат:
1. Спосіб стабілізації положення рухомого елемента плоскої пружної опори, який включає регулювання величин зазорів між основами плоскої пружної опори і поверхнею рухомого елемента, який відрізняється тим, що в основі плоскої пружної опори встановлюють обмежену множину Q датчиків величин зазорів, основи яких розміщують у площині згаданої основи плоскої пружної опори, причому, датчики величин зазорів встановлюють по "n" лініям...
Пристрій для юстирування положення лінійної напрямної і різцевої головки відносно осі обертання вала аеростатичної шпиндельної опори суперпрецизійного двокоординатного верстата
Номер патенту: 52410
Опубліковано: 16.12.2002
Автор: Зіненко Володимир Миколайович
МПК: B23B 41/00
Мітки: шпиндельної, лінійної, головки, різцевої, двокоординатного, вала, опори, обертання, суперпрецизійного, положення, напрямної, відносної, аеростатичної, пристрій, юстирування, осі, верстата
Формула / Реферат:
Пристрій для юстирування положення лінійної напрямної і різцевої головки відносно осі обертання вала аеростатичної шпиндельної опори суперпрецизійного двокоординатного верстата, який містить регулювальні гвинти положення лінійної напрямної, регулювальні гвинти положення різцевої головки, який відрізняється тим, що він має пристрій позиціонування датчиків величин проміжків, який включає втулку, до якої прикріплені два кронштейни, на кінцях...
Лінійна транспортна система
Номер патенту: 28057
Опубліковано: 16.10.2000
Автор: Юніцкій Анатолій Едуардович
МПК: E01B 5/00, B61B 13/04
Мітки: транспортна, лінійна, система
Текст:
...варительно напряженный продольный элемент в виде по крайней мере одной струны растянут до усилия Ni, определяемого из соотношений 0,5 < ^- < 0,999 ; 1 0 1 0 ; Q где: N2 - усилие разрыва струны при растяжении; Q - вес подвижной единицы. 5. Система по п. 1, отличающаяся тем, что стру на выполнена из отдельных проволок. 6. Система по п. 1, отличающаяся тем, что стру на выполнена из отдельных полос. 7. Система по п. 5 или 6, отличающаяся...
Лінійна опора катіння
Номер патенту: 24743
Опубліковано: 25.12.1998
Автори: Свирський Йосип Борухович, Пацєр Олександр Іванович, Клименко Вячеслав Дмитрович, Розенблюм Ілля Ірмович, Лагздіньш Володимир Вольдемарович, Клімковський Броніслав Мечиславович, Набоков Валерій Олександрович
Мітки: опора, лінійна, катіння
Текст:
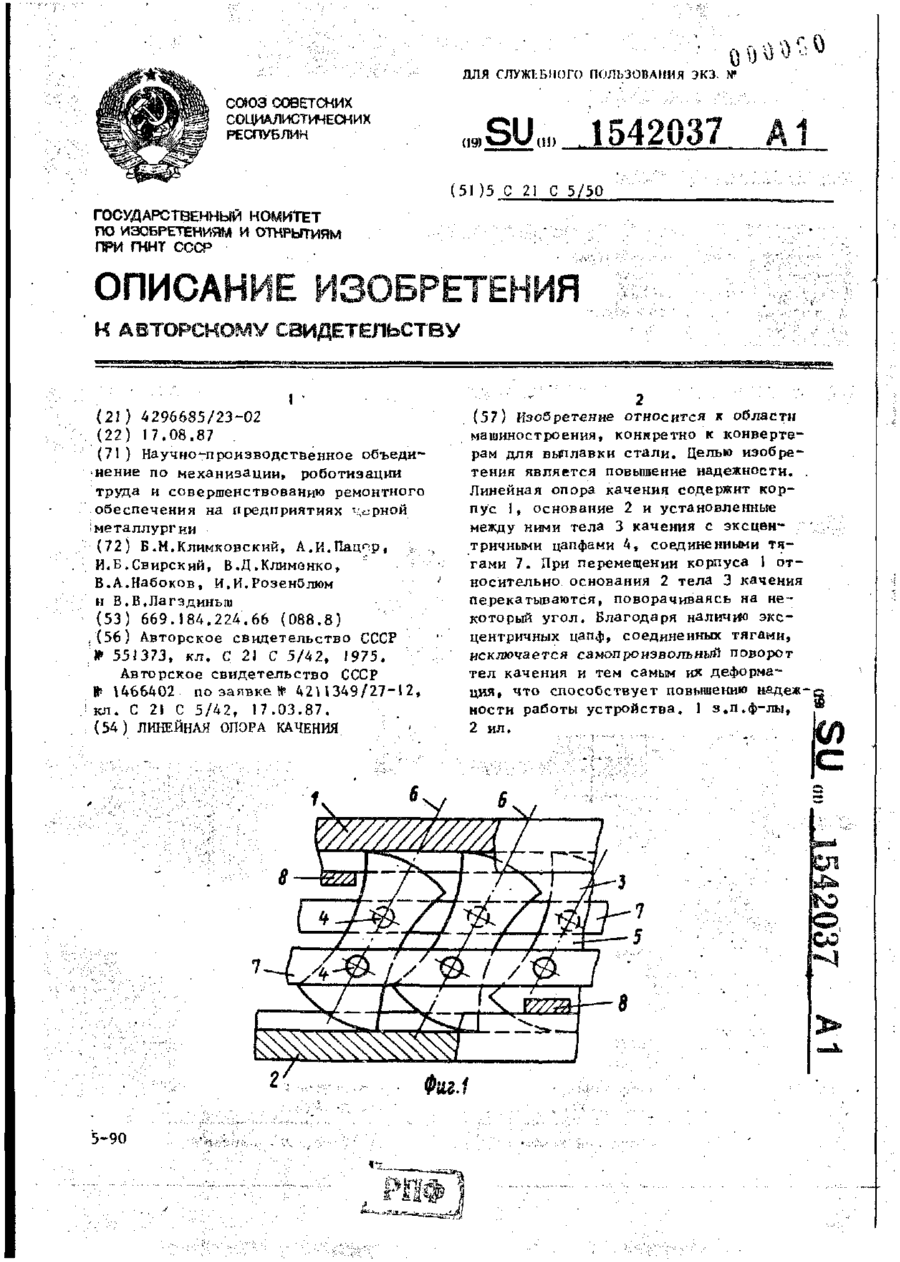
...установлены ограничители 8 перемещения тяг 7, Опора работает следующим образом. При перемещении корпуса 1 относи- 20 тельно основания 2 тела качения 3 перекрываются по рабочим поверхностям корпуса 1 и основания 2, поворачиваясь на некоторый угол. Поворот всех тел 3 качения из-за наличия об- 25 щих тяг 7, соединяющих цапфы 4 одного уровня, происходит синхронно, без относительных смещений и поворотов. Нос ле перемещения корпуса I на заданное...
Лінійна в’язкоеластична композиція для догляду за зубами
Номер патенту: 39096
Опубліковано: 15.06.2001
Автори: Пренсайп Майкл, Дурга Гарі А.
МПК: A61P 1/02, A61K 8/89, A61K 8/90, A61K 8/02
Мітки: догляду, лінійна, в'язкоеластична, зубами, композиція
Формула / Реферат:
1. Линейная вязкоэластичная композиция для ухода за зубами в форме зубной пасты или геля с рН от 4 до 9, содержащая приемлемый для полости рта водно-увлажнительный носитель, приемлемый зубной полирующий агент, а также синтетический линейный вязкоэластичный структурированный полимерный загуститель, отличающаяся тем, что модуль или динамический модуль упругости G' и модуль вязкости или потерь G" загустителя в водном 1% (вес.)...
Попередній патент: Стріловий гідравлічний кран
Наступний патент: Пристрій для формування виробів із пінобетонів
Випадковий патент: Стійкий до зламування замок