Автономна роботизована життєва форма
Формула / Реферат
1. Роботизована життєва форма, яка реагує на навколишнє середовище, яке змінюється, що сприймається згаданим роботом, причому згаданий робот містить:
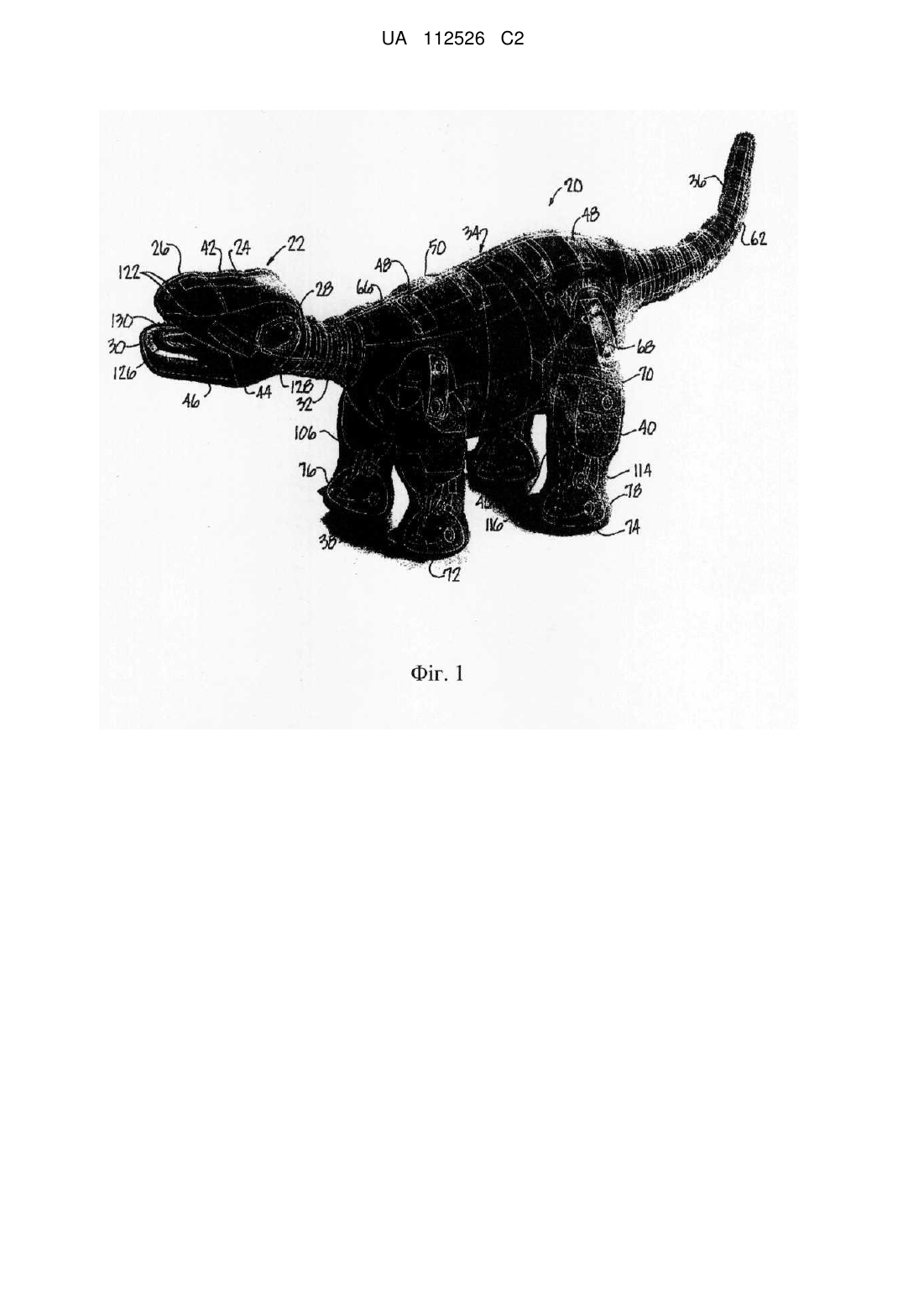
тіло робота, яке імітує молодого камаразавра, яке шарнірно зчленоване для руху вгору і вниз у вертикальній площині і зі сторони в сторону в горизонтальній площині і підтримується передніми і задніми ногами, які закінчуються відповідними лапами, кожна із згаданих ніг має щонайменше два з'єднання, згадане тіло має шию, яка закінчується головою, забезпеченою очима і пащею,
внутрішні і зовнішні датчики введення, які розташовані на згаданому тілі робота і реагують на торкання, звук і умови освітлення, рух, корм, температуру, голосові команди, час доби, а також перешкоди і небезпеки, в тому числі датчик торкання голови, множину датчиків торкання, розподілених по тулубу згаданого тіла, і множину датчиків торкання на згаданих лапах,
засіб, який реагує на згадані датчики, для визначення рівнів індексів збудження відповідно до критеріїв пріоритету, вибраних з множини груп невроджених анімацій, що містять настрій тіла робота, який відповідає одному з множини рівнів індексів збудження від сумного до веселого, фізичний стан робота, що відповідає одному з множини рівнів індексів збудження від знесиленого або сонного до енергійного, стан тіла робота, що визначається рівнями індексів збудження кормом від голодного до перегодованого і перенасиченого, рівнями індексів збудження здоров'я від хворобливого до здорового і рівнями індексів збудження емоцій тіла робота від полохливого до збудженого, і
множину сервоприводів, які зв'язані зі згаданим тілом робота і реагують на переважаючі індекси збудження для спонукання робота виконувати анімації, що є їх результатом, і є сумісними з вродженими атрибутами статі, активності, характеру, підкорення, тембру, шумності і кмітливості,
при цьому один або більше із згаданих вроджених атрибутів встановлюються випадковим чином в рамках визначеного діапазону для кожного зі згаданих атрибутів статі, активності, характеру, покори, тембру, шумності і кмітливості.
2. Роботизована життєва форма за п. 1, в якій перший із згаданих приводів керує згаданими очима робота, другий із згаданих приводів керує відкриванням і закриванням згаданої пащі, третій із згаданих приводів керує рухом згаданої голови, четвертий із згаданих приводів керує рухом шиї відносно тулуба, а п'ятий із згаданих приводів керує відносним рухом передньої і задньої частин тулуба, щоб спонукати тулуб повертатися і звиватися, тим самим, видаючи схожі на живі реакції на сприйняті умови.
3. Роботизована життєва форма за п. 1, що додатково містить засіб в згаданому роботі, що встановлює природжені атрибути, в тому числі стать, активність, характер, покору, тембр, шумність і кмітливість.
4. Роботизована життєва форма за п. 1, в якій згаданий робот має чоловічу стать, щовідрізняється спритністю, поганим характером, упертістю, низьким тембром, високою шумністю і низькою кмітливістю, або згаданий робот має жіночу стать, що відрізняється повільністю, хорошим характером, упертістю, високим тембром, високою шумністю і високою кмітливістю, або згаданий робот є безстатевим та відрізняється нормальною активністю, характером, покорою, тембром, шумністю і кмітливістю.
5. Роботизована життєва форма за п. 1, в якій згадане тіло робота забезпечене акустичним датчиком, засобом, який реагує на гучні звуки для відтворення переляканих анімацій і оновлення індексів поведінки, відтворення анімацій, що виявляються звуком, у відповідь на більш низькорівневі звуки, або анімацій, пов'язаних з прийнятим звуковим кодом.
6. Роботизована життєва форма за п. 1, в якій згадані датчики введення включають в себе інфрачервоний датчик пащі, інфрачервоні датчики лап і датчик положення в просторі для ініціювання відтворення анімацій у відповідь на датчики пащі і лап і анімацій, пов'язаних зі спрямованим впливом і переміщенням.
7. Роботизована життєва форма за п. 1, що додатково включає в себе засіб для виконання ігрових анімацій у відповідь на виявлену голосову команду.
8. Роботизована життєва форма за п. 1, в якій згадані датчики введення реагують на ласку позитивно і оновлюють індекси збудження настрою й емоційного збудження, реагують на удар негативно оновленням індексів збудження настрою, емоційного збудження і збудження роздратування з негативним ефектом і оновленням відповідних індексів збудження, і реагують на торкання ініціюванням анімацій, відповідних місцеположенню сигналу торкання.
9. Роботизована життєва форма за п. 1, в якій згадане тіло робота має хвіст, шарнірно зчленований для руху відносно згаданого тіла, а також сервопривід руху хвоста вгору-вниз для руху по вертикальній осі і сервопривід руху хвоста зі сторони в сторону для руху по горизонтальній осі, що зв'язують хвіст із задньою частиною згаданого тулуба у відповідь на вихідне збудження.
10. Роботизована життєва форма за п. 1, в якій згадане тіло робота має чоловічі природжені атрибути спритності, поганого характеру, упертості, низького тембру, високої гучності і низької кмітливості, або згадане тіло робота має безстатеві природжені атрибути нормальних активності, характеру, покори, тембру, шумності і кмітливості, або згадане тіло робота має жіночі природжені атрибути і є тихим, з хорошим характером, покорою, з високим тембром, низькою шумністю і високою кмітливістю.
11. Роботизована життєва форма за п. 1, в якій згаданий настрій робота має рівні індексів збудження від дуже сумного до дуже веселого, рівні індексів збудження фізичного стану від дуже виснаженого або сонного до дуже енергійного, рівні індексів харчування від дуже голодного до перегодованого і перенасиченого, рівні індексів здоров'я від дуже хворого до дуже здорового і рівні емоційних індексів від дуже полохливого або злого до дуже збудженого, і включає в себе логіку вибору групи анімацій, що реагує на згадані рівні індексів.
12. Роботизована життєва форма за п. 1, що додатково містить ініціатори датчиків, які реагують на звук, ІЧ-датчик пащі, ІЧ-датчики лап і датчик положення в просторі для ініціювання відповідних анімацій.
13. Роботизована життєва форма за п. 1, що додатково включає в себе засіб для розпізнавання клички роботизованої життєвої форми й ініціювання ігрових анімацій, пов'язаних з виявленою голосовою командою.
14. Роботизована життєва форма за п. 1, що додатково включає в себе засіб, який реагує на ініціюючий сигнал RFID корму, для визначення типу корму і оновлення індексів збудження з відповідними позитивними або негативними ефектами, і/або згаданий робот забезпечений засобом, який реагує на ініціюючий сигнал RFID корму для визначення, чи є корм здоровим, закусочним, рослинним або лікувальним, і позитивного або негативного реагування залежно від визначених індексів збудження харчування, і/або включає в себе модуль обробки корму, який реагує на ініціюючий сигнал RFID для визначення, чи є корм необхідним для здоров'я, закусочним, рослинним або лікувальним, і оновлення індексів збудження з відповідним позитивним чи негативним ефектом.
15. Автономний, персональний роботизований компаньйон, який імітує живу істоту, що реагує на навколишнє середовище, що змінюється, яке сприймається згаданим роботом, причому згаданий робот містить:
тіло робота, що імітує молодого камаразавра, яке шарнірно зчленоване для руху вгору і вниз і зі сторони в сторону і підтримується передніми і задніми ногами, які закінчуються відповідними лапами, кожна зі згаданих ніг має щонайменше два з'єднання, згадане тіло має шию, що закінчується головою, забезпеченою очима і пащею,
причому згадане тіло робота має вроджені атрибути, у тому числі стать, активність, характер, покору, тембр, гучність і кмітливість,
внутрішні і зовнішні датчики введення, які розташовані на згаданому тілі робота і реагують на дотик, звук і умови освітлення, рух, корм, температуру, голосові команди, час доби, а також перешкоди і небезпеки, в тому числі датчик торкання голови, множину датчиків торкання, розподілених по тулубу згаданого тіла, і множину датчиків торкання на згаданих лапах, засіб, що реагує на згадані датчики, для визначення рівнів індексів збудження відповідно до критеріїв пріоритету, вибраних з множини груп невроджених анімацій, які містять настрій тіла робота, відповідний одному з множини рівнів індексів збудження від сумного до веселого, фізичний стан робота, відповідний одному з множини рівнів індексів збудження від виснаженого або сонного до енергійного, стан тіла робота, який визначається рівнями індексів збудження кормом від голодного до перегодованого і пересиченого, рівнями індексів збудження здоров'я від хворобливого до здорового і рівнями індексів збудження емоцій тіла робота від полохливого до збудженого, і
множину сервоприводів, які пов'язані зі згаданим тілом робота і реагують на переважаючі індекси збудження для спонукання робота виконувати анімації, які є їх результатом, і сумісні зі згаданими вродженими атрибутами статі, активності, характеру, покори, тембру, шумності і кмітливості,
при цьому один або більше із згаданих вроджених атрибутів встановлюються випадковим чином в рамках визначеного діапазону для кожного зі згаданих атрибутів статі, активності, характеру, покори, тембру, шумності і кмітливості.
Текст
Реферат: Роботизована життєва форма імітує живу істоту, яка реагує на оточуюче середовище, яке міняється, що сприймається згаданим роботом, і має тіло робота, яке зчленоване і підтримується щонайменше двома ногами (38, 40). Внутрішні і зовнішні датчики введення (42, 44, 46, 48, 62, 72, 74, 122, 124, 125, 126, 128) розташовані на тілі робота і чутливі до торкання, звуку і умов освітлення, руху, корму, температурі, голосовим командам, часу доби, а також перешкодам і небезпекам. Приводи (82, 86, 88, 90, 92), реагуючі на датчики введення, керують очима (28) робота, відкриванням і закриванням його пащі (30), рухом голови (22), рухом шиї відносно тулуба (34) і відносними рухами передньої (94) і задньої (96) частин тулуба (34), щоб примушувати тулуб (34) повертатися і звиватися. Рівні (332) індексів збудження відповідно до критеріїв пріоритету, вибраних з множини груп (342) анімацій, визначають рівні (332) індексів збудження, і сервоприводи, асоціативно зв'язані з тілом, реагують на переважаючі індекси збудження, примушуючи робота виконувати анімацію, що є їх результатом. UA 112526 C2 (12) UA 112526 C2 UA 112526 C2 5 10 15 20 25 30 35 40 45 50 55 60 Цей винахід стосується автономної анімованої життєвої форми, зокрема, роботизованої життєвої форми/супутника, що має подібні живим характеристики і реакції. РІВЕНЬ ТЕХНІКИ ВИНАХОДУ Роботизовані життєві форми, що мають подібні живим характеристики, були введені і використовувалися по всьому світу. Наприклад, маля динозавра, що продається під торговим знаком PLEO, є роботизованим вихованцем, який набув значного комерційного успіху і є цікавою і приємною домашньою твариною. Однак, по-справжньому милий і цікавий вихованець домашня тварина, здатна до відтворення реакції живої істоти в численних аспектах подібних живим реакцій на своє оточуюче середовище і свого господаря або господиню, може мати обмежені можливості. Наприклад, якщо робот обмежений по своїй можливості реагувати на голосову команду, датчик торкання або зовнішню умову і відтворювати необхідну подібну живій реакцію, він є менш бажаним як життєва форма або вихованець. Реакція повинна відображати рівень подразника, такого як пещення на противагу удару, і відповідати відповідною анімацією. Однак, якщо база даних попередньо анімованих допустимих рухів обмежена, дія і вдача роботизованого пристрою обмежена подібним чином. СУТЬ ВИНАХОДУ У варіанті здійснення даного винаходу, вищезазначена проблема обмеженої реакції робота вирішується заходами у відповідь за допомогою надання роботизованої домашньої тварини, яка реагує на деяку кількість зовнішніх вхідних сигналів, ініційованих його людиною-власником або з інших зовнішніх подразників, і який, в межах своєї внутрішньої робототехніки, має здатність реагування одним з деякої кількості можливих робочих режимів, щоб по-справжньому видавати подібну живій реакцію заради задоволення і насолоди свого власника. У ще одному аспекті винаходу, датчики введення робота чутливі до деякої кількості умов, що сприймаються, в тому числі, перевантаженням, руху, напрямку руху, положенню тіла робота і прискоренню. У ще одному аспекті винаходу, зовнішні датчики введення реагують на подразники харчування, тепло і холод, голосові команди, умови світла або темряви, відповідні часу доби, наявність перешкод або крутих схилів й інші умови, на які реагувала б жива життєва форма. Ще одним іншим аспектом даного винаходу є здатність робота розпізнавати голос свого власника і реагувати відповідно подібним живому чином. Інші переваги і можливості цього винаходу стануть очевидними з подальшого опису, взятого в зв'язку з прикладеними кресленнями, на яких як ілюстрація і приклад викладений варіант здійснення даного винаходу. КОРОТКИЙ ОПИС КРЕСЛЕНЬ Фіг. 1 ілюструє зразкову роботизовану життєву форму за даним винаходом, яка являє собою маля динозавра і, що показує місцеположення різних датчиків; фіг. 2 показує роботизовану життєву форму за фіг. 1 зі знятою її зовнішньою оболонкою для показу внутрішніх деталей; фіг. 3 - схема послідовності операцій, що показує моделі зі штучним інтелектом та індивідуальності роботизованої життєвої форми за даним винаходом; фіг. 4 - схематичний вигляд збоку роботизованої життєвої форми, що показує приводи і датчики; фіг. 5 - блок-схема послідовності операцій способу, внутрішнє програмне забезпечення, яке реагує на зовнішні вхідні ініціюючі сигнали; фіг. 6 - структурна схема апаратних засобів роботизованої життєвої форми; фіг. 7 - таблиця природжених атрибутів і значень. фіг. 7A - таблиця індексів ДНК. фіг. 8 - таблиця установки пріоритету анімацій, що є результатом асоціативно зв'язаних індексів збудження; фіг. 9 - приклад вибраних груп анімацій, кожна з яких виробляє відповідну поведінку робота; фіг. 10 A-K - таблиці, що перелічують зовнішні вхідні сигнали і режими збудження, що виходять в результаті; фіг. 11 - структурна схема, що ілюструє дію чотирьох ініціаторів датчиків; фіг. 12 - структурна схема розпізнавання голосу; фіг. 13 - приклад схеми послідовності операцій ініціюючого сигналу RFID корму; і фіг. 14 - блок схема послідовності операцій способу ініціюючого сигналу торкання. ДОКЛАДНИЙ ОПИС Спочатку, з посиланням на фіг. 1, роботизована життєва форма за даним винаходом загалом вказана номером 20 посилання. Як проілюстровано, роботизована життєва форма 20 знаходиться у вигляді молодого динозавра камаразавра, добре відомого динозавра-завропода, 1 UA 112526 C2 5 10 15 20 25 30 35 40 45 50 55 60 знайденого в Північній Америці, яка найбільшій мірі зустрічається в копалинах з пізнього юрського періоду. Його голова 22 є короткою і коробчастою, з ніздрями 24, посадженими над його мордою 26 і перед його очима 28 і пащею 30. Його шия 32 коротша і товстіша, ніж у більшості динозаврів-завроподів, і він має товстий тулуб 34 і короткий до деякої міри сплюснутий хвіст 36. Його передні лапи або передні ноги 38 і задні лапи або задні ноги 40 мають приблизно однакову довжину, задні лапи 40 є дещо довшими. У переважному варіанті здійснення роботизована життєва форма 20 сконфігурована як молодий камаразавр, що імітує його рухи, які сприймаються, поведінку, індивідуальність, взаємодію зі своїм оточуючим середовищем, емоції, реакції і кмітливість, включаючи навчання. Однак, цей винахід не обмежений переважним варіантом здійснення, викладеним в матеріалах даної заявки, оскільки доктрини цього розкриття можуть бути застосовані до інших життєвих форм і роботизованих життєвих форм. Наприклад, рухи, поведінка, індивідуальність, взаємодії, що стосуються оточуючого середовища, емоції, реакції і кмітливість можуть бути застосовані до собаки, зокрема на її початок вигодовування як щеня і проходження через дорослу собаку, і закінчуючи старою собакою, і застосовуються до інших звичайних форм домашніх тварин, наприклад, таких як кішка, черепаха, кролик, кінь, свиня, корова, і т. д. З посиланням на фіг. 1, 2, 4 і 6, всередині робот включає в себе перемикачі, датчики, електронні елементи керування, сервоприводи і електродвигуни в доповнення до програмного забезпечення для приведення в дію електронного вихованця 20. Один або більше датчиків 42 торкання голови можуть бути розташовані вздовж маківки голови 22. Датчики включають в себе сенсорні майданчики 41 (фіг. 6), приєднані до процесора 43 датчиків торкання. Два або більше датчиків 44 торкання щік можуть бути розташовані на протилежних сторонах голови 22. Один або більше датчиків 46 торкання підборіддя можуть бути розташовані під пащею 30 і розподілятися по її переду і бокам. Вздовж тулуба 34 роботизованого вихованця, можуть бути розташовані один або більше датчиків 48 торкання, показані чотири датчики 48. Як проілюстровано на фіг. 4, датчики 48 торкання тулуба розташовані тільки вздовж спини 50 роботизованої життєвої форми 20, з тим щоб не захаращувати ілюстрацію. Однак, повинно бути зрозуміло, що множина датчиків торкання тулуба можуть бути розташовані по боках 52 грудей 54, живота 56, стегон 58 і заду 60 роботизованої життєвої форми 20, якщо потрібно. Один або більше датчиків 62 торкання хвоста можуть бути розташовані вздовж хвоста 36. Один або більше датчиків 64 торкання лопаток можуть бути розташовані на протилежних плечах 66 роботизованої життєвої форми 20. Один або більше датчиків 68 торкання стегон можуть бути розташовані на протилежних стегнах 70 роботизованої життєвої форми 20. Один або більше датчиків 72 і 74 торкання ступнями землі можуть бути розташовані в кожній з передньої 76 і задньої 78 ступней. Як альтернатива, кожна ступня 76 і 78 може включати в себе контактні перемикачі. Датчики торкання можуть бути дискретними датчиками торкання або, залежно від місцеположення, смуговим датчиком торкання. Наприклад, вздовж маківки голови 22 датчик 42 торкання голови може бути одиночним дискретним датчиком торкання, а датчик 48 торкання тулуба може бути дискретним датчикам торкання або одиночним смуговим датчиком торкання, що продовжується від зашийка 32 вздовж спини 50 до хвоста 36. Дискретні або смугові датчики торкання можуть бути сприймаючими зусилля резисторами із змінним рівнем чутливості, наприклад, використовуючи дільник напруги. Всі з датчиків торкання є частиною сітки датчиків торкання, що покриває частину, або по суті всю зовнішню оболонку роботизованого вихованця. Сітка датчиків торкання, наприклад, може використовуватися на тулубі 34 нарівні з тим, що дискретні датчики торкання розташовані в специфічних зонах, таких як нижні частини ступней 76 і 78. Інші датчики торкання, такі як ємнісні датчики торкання фізичних зусиль, також можуть використовуватися. Датчики торкання, такі як тонкоплівкові гнучкі тактильні датчики зусиль і/або тиску, також можуть використовуватися. Декілька сервоприводів можуть бути реалізовані в роботизованій життєвій формі 20. Два або більше сервоприводів 82 очей (фіг. 4) керують рухом очей 28 і повік 84. Сервопривід 86 пащі керує відкриванням і закриванням пащі 30. Сервопривід 88 голови приєднує голову 22 до шиї 32, щоб рухати головою 22 в крутильному русі. Сервопривід 90 шиї приєднує шию 32 до тулуба 34 для руху шиєю 32 і головою 22 з сторони в сторону, вгору і вниз, і в крутильному русі. Сервопривід 92 скручування тулуба приєднує передній тулуб 94 до заднього тулуба 96, щоб повертати і скручувати тулуб 34. Пара верхніх сервоприводів 98 передніх ніг приєднує передні ноги 38 до плечей 66 для руху передніх кінцівок кожної ноги 38 від асоціативно зв'язаного плеча 66 по кожній стороні роботизованої життєвої форми 20. Пара середніх сервоприводів 100 передніх ніг приєднує верхні частини 102 передніх ніг 38 до нижніх частин 104 передніх ніг 38 для руху передніх 2 UA 112526 C2 5 10 15 20 25 30 35 40 45 50 55 60 кінцівок в передніх колінах або ліктях 106. Пара нижніх приводів 108 передніх ніг приєднує нижні частини 104 передніх ніг 38 до передніх ступней 76, щоб забезпечувати поворотний і/або крутильний рух ступней 76. Пара верхніх сервоприводів 110 задніх ніг приєднує задні ноги 40 до стегон 58 для руху задніх кінцівок від стегон 58. Пара середніх сервоприводів 112 задніх ніг приєднує гомілки 70 до нижніх частин 114 задніх ніг 40 для руху задніх кінцівок в задніх колінах. Пара нижніх приводів 116 задніх ніг приєднує нижні частини 114 задніх ніг 40 до ступней 78, щоб забезпечувати поворотний і/або крутильний рух ступней 78. Сервопривід 118 руху хвоста вгору-вниз і сервопривід 120 руху хвоста з сторони в сторону приєднують хвіст 36 до заднього тулуба 96 для руху хвоста. Керування сервоприводом може бути одиничним або в будь-якій комбінації для здійснення руху. Наприклад, сервопривід 88 голови може рухати головою 22 з сторони в сторону як при похитуванні головою 22 "ні" або вгору і вниз, як при похитуванні голови 22 "так". Сервопривід 88 голови приєднує голову 22 до шиї, щоб рухати головою 22 в крутильному русі. Один або більше інфрачервоних передавачів/приймачів 122 можуть бути вбудовані в морду 26 для сприйняття присутності інших роботизованих життєвих форм і/або прийому іншої інформації. Передавачі/приймачі 122 приєднані до ІЧ-модуля 121 (фіг. 6). ІЧпередавачі/приймачі 122 можуть використовуватися для сприйняття об'єктів і меж, наприклад, щоб оберігати роботизовану життєву форму 20 від падіння з поверхні стола або іншої піднятої конструкції. Камера 124 на КМОП-структурах, приєднана до модуля 123 камери, може бути вбудована в морду 26 поблизу ІЧ-передавача 122 (фіг. 4 і 6) для виявлення умов освітлення, таких як день і ніч. Датчик 125 температури видає вхідні сигнали температури оточуючого середовища, які можуть впливати на різні режими роботи і поведінку роботизованої життєвої форми 20. Зчитувач 126 радіочастотної ідентифікації (RFID) може бути інтегрований в пащу 30 роботизованої життєвої форми, щоб реагувати на RFID-мітки 127, ідентифіковані як корм, ідентифікаційні карти і/або засоби навчання. Хоча дальність дії RFID 126 може бути аж до сорока футів, дальність дії конкретного RFID 126, вставленої в пащу 30 роботизованої життєвої форми, може бути обмежена вимогою об'єкта бути в контакті або дуже близько від підборіддя 31 роботизованої життєвої форми до декількох дюймів або футів від RFID 126. Пара мікрофонів, розташованих на 128 на кожній стороні голови 22, дозволяє роботизованій життєвій формі 20 "чути" команди, визначати напрямок звуку і розпізнавати і впізнавати голос. Передній гучномовець 130, приєднаний до звукового модуля 131 (фіг. 6), може бути розташований в пащі 30. З посиланням на фіг. 1-6, всі з датчиків видають вхідні ініціюючі сигнали 200 в програмний модуль 202 штучного інтелекту (AI) (фіг. 3), який приводиться у виконання мікропроцесорним блоком 206 керування (MCU) (фіг. 6). Вхідні ініціюючі сигнали обробляються на 208 (фіг. 5), де вхідні сигнали перетворюються і масштабуються для модуля 210 AI. Одержана в результаті часова дія кожного з вхідних значень може масштабуватися згідно з залежністю 212 вхідного сигналу та індексу збудження. Індекси збудження AI в момент t часу оновлюються на етапі 214. Індекси в момент t часу порівнюються, щоб визначити переважаючі індекси збудження (DDI) згідно з критеріями 216 пріоритету по вихідним змінним 218 і експлуатаційним індексам 220 (фіг. 3). Відповідні файли анімації витягуються, і впорядковані DDI витягуються на етапі 220. Потім, переважаючі файли анімації для DDI 1-N експортуються в привідну систему 228 (фіг. 5). Якщо часове перекриття, яке є часовим інтервалом між зовнішніми ініціюючими сигналами 224, не закінчилося, 226, вихідна система 228 приводу видає належні сигнали на контролери електродвигунів, приводи і гучномовці 230. Якщо часове перекриття закінчилося, 232, анімація сну або відпочинку, 234, видається у вихідну привідну систему 228. Модель 216 індивідуальності керує всіма вхідними ініціюючими подіями 210 (фіг. 3) з комбінацією всіх зв'язаних умов, експлуатаційного індексу 220, вихідних змінних 218 і випадкових змінних. Система 220 експлуатаційних індексів керує підтримкою експлуатаційних індексів з вихідних змінних 218, подій 238 й індексу 240 ДНК. Вихідні змінні 218 перебувають під впливом експлуатаційного індексу 220, ініціюючого сигналу 238 події і моделі 216 індивідуальності. З посиланням на фіг. 7, роботизована життєва форма 20 включає в себе природжені атрибути 300, наприклад, такі як стать 302, активність 304, характер 306, покора 308, тембр 310, шумність 312 і кмітливість 314. Стать 302 може бути чоловічою, жіночою або безстатевою. Атрибут 304 активності знаходиться в діапазоні від спритного до нормального в бік спокійного. Атрибут 306 характеру знаходиться в діапазоні від поганого до нормального в бік хорошого. 3 UA 112526 C2 5 10 15 20 25 30 35 40 45 50 55 60 Атрибут 308 покори знаходиться в діапазоні від упертого до нормального в бік слухняного. Атрибут 310 тембру знаходиться в діапазоні від низького до нормального в бік високого. Атрибут 312 шумності знаходиться в діапазоні від тихого до нормального в бік шумного. Атрибут 314 кмітливості знаходиться в діапазоні від нетямущого до нормального в бік кмітливого. Кожний з цих природжених атрибутів 300 може перебувати під впливом одного або більше інших природжених атрибутів. Наприклад, якщо атрибут 302 статі має значення "чоловічий", середні типові відповідні природжені атрибути 300 можуть включати в себе атрибут 304 активності "спритний", атрибут 306 характеру "поганий", атрибут 308 покори "упертий", атрибут 310 тембру "низький", атрибут 312 шумності "шумний" і атрибут 314 кмітливості "нетямущий". Якщо атрибут 302 статі має значення "жіночий", типові відповідні природжені атрибути 300 можуть бути атрибутом 304 активності "спокійний", атрибутом 306 характеру "хороший", атрибутом 308 покори "слухняний", атрибутом 310 тембру "високий", атрибутом 312 шумності "тихий" і атрибутом 314 кмітливості "кмітливий". Хоча кожний з природжених атрибутів описаний вище як такий, що має діапазон з трьох значень, повинно бути зрозуміло, що діапазон може мати значення дискретних об'ємів і приростів або може бути безперервним. Індекс ДНК викладений на фіг. 7A. Природжені значення 300, спочатку встановлені для конкретної роботизованої життєвої форми 20, можуть бути основані на дзвоноподібній кривій, налаштованій згідно з атрибутом 302 статі. Наприклад, якщо атрибут 302 статі є безстатевим, то центр дзвоноподібних кривих може спочатку встановлюватися на центр або нормальне значення для кожного природженого атрибута 300. Деякі або всі природжені атрибути 300 можуть довільно налаштовуватися і встановлюватися для обмеження передбачуваності поведінки роботизованої життєвої форми 20. Якщо атрибут 302 статі встановлений в жіночий, то центр дзвоноподібних кривих спочатку може встановлюватися в значення між нормальним значенням і зовнішньою межею для атрибута жіночого типу. Наприклад, середнє значення для атрибута 304 активності для жіночої статі може знаходитися між нормальним і спокійним. Серединне значення або атрибут 310 тембру можуть бути нормальним і високим. За допомогою застосування випадково сформованого налаштування до кожного із значень природжених атрибутів 300, кожна роботизована життєва форма 20 починає зі своїх власних встановлених атрибутів, які роблять її відмінною від інших роботизованих життєвих форм. Наприклад, одна жіноча роботизована життєва форма може мати всі з своїх значень природжених атрибутів 300 в межах одного середньоквадратичного відхилення від серединного значення, в той час як інша жіноча роботизована життєва форма може мати значення атрибута 310 тембру, встановлене в значення на нижній стороні шкали, два або більше середньоквадратичних відхилень від серединного значення для всіх жіночих роботизованих життєвих форм. З посиланням на фіг. 7-9, роботизована життєва форма 20 може включати в себе п'ять неприроджених атрибутів 320, в тому числі настрій 322, фізичний стан 324, харчування 326, здоров'я 328 і емоції 330. Ці неприроджені атрибути 320, які також указуються посиланням як індекси збудження, включені в систему AI, щоб визначати фізичний стан і соціальну поведінку роботизованої життєвої форми. Ці неприроджені атрибути 320 можуть перебувати під впливом природжених атрибутів 300 і завдяки взаємодії з її оточуючим середовищем. Атрибут 322 настрою змінюється від дуже сумного до нормального до дуже веселого. Подібно реальним вихованцям, атрибут 322 настрою може підпадати під негативний вплив з часом, якщо його б'ють або лають. Атрибут 322 настрою може підпадати під позитивний вплив з часом, наприклад, якщо з ним граються, його пестять або він харчується кормом, який йому подобається. Роботизована життєва форма 20 може показувати або демонструвати свій настрій за допомогою мови тіла і звуку. Атрибут 322 настрою може впливати на атрибут 308 покори і атрибут 304 активності, наприклад, що демонструються її готовністю реагувати на голосові команди і брати участь в грі. Атрибут 324 фізичного стану може знаходитися в діапазоні від дуже виснаженого або сонного до нормального до дуже енергійного. Атрибут 324 фізичного стану може змінюватися з часом, з більш високим рівнем енергії вранці після повної ночі сну, зменшуючись протягом дня до відчуття виснаження вночі перед часом лягати спати. Іншими факторами, які можуть впливати на рівень енергії, є часова тривалість для активного руху, наприклад, такого як участь в грі, і час після останнього прийому корму або пропущеного прийому корму, які можуть знижувати значення атрибута 324 фізичного стану. Рівень енергії, наприклад, може підвищуватися сном, відпочинком, належним харчуванням і харчуванням енергетичними кормами. Фізичний стан може показуватися або демонструватися роботизованою життєвою формою 20 за допомогою її мови тіла, такої як швидкі енергійні рухи проти повільних і важких 4 UA 112526 C2 5 10 15 20 25 30 35 40 45 50 55 60 рухів, або за допомогою її готовності реагувати на команди й інші взаємодії і зовнішні подразники. Атрибут 326 харчування може знаходитися в діапазоні від дуже голодного (тобто, пропущених трьох або більше прийомів корму підряд) до повного до перегодованого і перенасиченого. Атрибут 326 харчування змінюється з часом і перебуває під впливом кількості і типу корму "спожитого" роботизованою життєвою формою 20. Якщо пропущені один або більше прийомів корму, атрибут 326 харчування може зменшуватися, що може впливати на атрибут 322 настрою, атрибут 324 фізичного стану і атрибут 328 здоров'я. Якщо дуже багато корму видано роботизованій життєвій формі 20, якщо харчується між нормальними моментами часу харчування, або вона харчується нездоровими кормами, атрибут харчування може збільшуватися, впливаючи на атрибут 324 фізичного стану і атрибут 328 здоров'я. Атрибут 328 здоров'я може знаходитися в діапазоні від дуже хворобливого/травмованого до нормального до дуже здорового. Атрибут 328 здоров'я може різко змінюватися від здорового до травмованого, наприклад, якщо робота 20 упустили з висоти. У травмованому стані роботизована життєва форма 20 може бути нездатною ходити або шкутильгати на травмованій нозі(гах). Крім того, місцеположення травми може впливати на її рух, такий як травма стопи, коліна, плеча або спини. Фізична травма може впливати на бажання роботизованої життєвої форми рухатися, грати, реагувати на команди, атрибут 322 настрою і атрибут 324 фізичного стану. Атрибут 328 здоров'я може підпадати під негативний вплив температури (дуже спекотної або дуже холодної), або якщо роботизована життєва форма 20 харчується дуже великою кількістю корму, дуже сурогатним кормом, гарячим кормом, або пропущеного прийому корму. Якщо атрибут 328 здоров'я знаходиться нижче нормально, можуть вражатися інші атрибути, такі як фізичний стан 324, настрій 322, активність 304 і покора 308. Харчування роботизованої життєвої форми 20 травою і пещення роботизованої життєвої форми 20 може підвищувати атрибут 328 здоров'я з часом. Роботизована життєва форма 20 у стані від нормального до дуже здорового буде нормально діяти, причому її поведінка визначається іншими атрибутами. Атрибут 330 емоцій може знаходитися в діапазоні від дуже переляканого/розсердженого до незворушного до дуже збудженого. Атрибут 330 емоцій може підпадати під негативний вплив падінням роботизованої життєвої форми 20, наприклад, утримуванням її вниз головою або за її хвіст 36, або утриманням її в темряві в денний час. Її реакція страху або люті, наприклад, може перебувати під впливом атрибута 302 статі, атрибута 306 характеру, атрибута 322 настрою і атрибута 324 фізичного стану. Нарівні з грою з роботизованою життєвою формою 20 за допомогою похитування її, підкиданням і ловленням її, або за допомогою її годування гострим кормом, атрибут 330 емоцій може підпадати під позитивний вплив, як продемонстровано її рівнем збудження. Атрибут 330 емоцій може впливати на поведінку роботизованої життєвої форми у великій мірі, яка демонструється мовою її тіла і звуковим виведенням. Атрибут 330 емоцій до деякої міри може впливати на кожний з інших атрибутів 300 і 320. Для кожного неприродженого атрибута 320 рівень 332 індексу (фіг. 8) є парним з пріоритетом 334 для конкретного атрибута. Як проілюстровано, рівень індексу знаходиться в діапазоні з 1 до 9, а пріоритет знаходиться в діапазоні від А до D, причому, А є вищим пріоритетом, а D є нижчим пріоритетом. Загалом, чим нижчий індекс 332, тим більший негативний асоціативно зв'язаний атрибут, і чим вищий індекс 332, тим позитивніший асоціативно зв'язаний атрибут. Однак, пріоритет 334, асоціативно зв'язаний з конкретним атрибутом 320, може призначатися на основі інтенсивності рівня атрибута і взаємного впливу або залежності з іншими атрибутами. У будь-який конкретний момент часу рівень 332 індексу зчитується для кожного з неприроджених атрибутів 320 і асоціативно зв'язаного пріоритету для конкретного неприродженого атрибута 320, щоб визначати комбінацію групи 336 анімацій. Наприклад, якщо індекс атрибута 322 настрою має значення 5, а атрибут фізичного стану має значення 4, й індекс атрибута 326 харчування має значення 3, а атрибут 328 здоров'я має значення 3, й індекс атрибута 330 емоцій має значення 6, комбінацією є DCAAD, або, переупорядкована по пріоритету AACDD. У цьому прикладі тільки анімації, асоціативно зв'язані з атрибутом 326 харчування і атрибутом 328 здоров'я, будуть вибиратися з логіки 338 вибору групи анімацій. На основі логіки 338 вибору всі анімації пріоритетів А і В вибираються і відтворюються раніше анімацій пріоритету С і D. Як тільки вибрана послідовність анімацій, вони відтворюються у випадкових поєднаннях і черговості. Як проілюстровано на фіг. 9, наданий ряд прикладів 340 нарівні з вибраними групами 342 анімацій. У прикладі "344" індекс атрибута 322 настрою має значення 9, індекс атрибута 324 фізичного стану має значення 5, індекс атрибута 326 харчування має значення 3, індекс атрибута 328 здоров'я має значення 2, та індекс атрибута 330 емоцій має значення 1. 5 UA 112526 C2 5 10 15 20 25 30 35 40 45 50 55 60 Одержувані в результаті вибрані групи анімацій, 342, мають значення AAA, відповідне достатньо голодному, пригніченому і дуже переляканому. У прикладі "j" 346, індекс атрибута 322 настрою має значення 9, індекс атрибута 324 фізичного стану має значення 9, індекс атрибута 326 харчування має значення 5, індекс атрибута 328 здоров'я має значення 9, та індекс атрибута 330 емоцій має значення 9. Одержувані в результаті вибрані групи анімацій, 342, мають значення DDDDD, відповідне дуже задоволеному, дуже енергійному, ситому, дуже здоровому і дуже збудженому. Інші приклади показані на фіг. 11. Повинно бути зрозуміло, що комбінація індексів і відповідних груп анімацій не обмежена проілюстрованими прикладами. Залежно від кількості індексів, кількості атрибутів і кількості рівнів пріоритету, комбінація груп анімацій може бути практично необмеженою, з додатковою варіацією випадкового порядку активізації конкретного атрибута з вибраної групи анімацій. З посиланням на фіг. 5-9 і 10A-10K, зовнішні датчики 400, окремо ідентифіковані на фіг. 4 (наприклад, 42, 44, 48, і т. д.), забезпечують введення в і вибір різних режимів 402 введення. Режими 402 введення впливають на різні природжені атрибути 300, а також неприроджені атрибути 320. Наприклад, датчики 404 торкання ініціюють деяку кількість різних режимів введення залежно від конкретного зачепленого датчика торкання, послідовності приведення в дію датчиків торкання і сили торкання. Якщо датчики 48 торкання зачіпаються в послідовності від шиї 32 до хвоста 36, вибраним режимом введення є пещення по її спині 406. Пещення роботизованої життєвої форми 20 по її спині 50 й ініціювання режиму 406 введення впливає позитивним чином на атрибут 322 настрою, атрибут 330 емоцій і атрибут 306 характеру. Якщо індекс 322 настрою мав значення 6, він може збільшуватися, наприклад, до 7, хоча не обов'язково відразу. Режиму 406 введення пещення по її спині може бути необхідним активізуватися на період часу, щоб один або більше з індексів були поступово збільшуваними. Додатково, індекси атрибутів, що знаходяться під впливом, можуть бути поступово збільшуваними з різними інтервалами. Наприклад, атрибут 330 емоцій може збільшуватися швидше, ніж атрибут 322 настрою. Якщо маківка голови 22 піддається пещенню за допомогою торкання датчика 42, вибирається режим введення пещення маківки 408 голови, наприклад, що впливає позитивним чином на атрибут 322 настрою, атрибут 330 емоцій і атрибут 306 характеру. Якщо датчик 44 торкання щік або датчик 46 торкання підборіддя піддаються торканню, наприклад, ініціюється режим введення пещення бічних щік 410, який позитивно впливає на атрибут 322 настрою і атрибут 330 емоцій. Ініціюється режим 412 руху голови услід за торканням, який активізує вихідну привідну систему 228, щоб приводити в дію сервопривід 88 голови і сервопривід 90 шиї, щоб рухати голову у напрямку до сторони голови 22, якої торкаються. Якщо торкаються датчику 46 торкання підборіддя, ініціюється режим введення пещення нижче підборіддя 414, що позитивно впливає на атрибут 308 покори. Якщо торкаються датчику 64 торкання плечей, ініціюється режим введення пещення плечей 416, що позитивно впливає на атрибут 328 здоров'я. Якщо роботизована життєва форма 20 ударяється де-небудь 418, атрибут 322 настрою і атрибут 306 характеру підпадають під негативний вплив, але атрибут 308 покори підпадає під позитивний вплив. На закінчення, якщо датчики торкання по будь-якій стороні роботизованої життєві форми піддаються торканню і утримуються, активізується режим введення 420 утримування і відпущення, що негативно впливає на атрибут 306 характеру. Повинно бути зрозуміло, що різні реакції на вхідний сигнал датчика торкання призначені тільки для ілюстративних цілей і не обмежені конкретними реакціями, показаними і описаними. Повертаючись до фіг. 10B, датчик 422 положення в просторі (фіг. 6) виявляє рух 424 (M) напрямок 426 (D), положення 428 (Р) і прискорення 430 (А). Якщо роботизована життєва форма 20 падає на свою голову 432, датчик 422 положення в просторі виявляє рух 424, напрямок 426 і прискорення 430, а також вхідний сигнал датчика 42 торкання голови, впливаючи негативним чином на атрибути фізичного стану 324, настрою 322, емоцій 330 і покори 308, негайно знижуючи відповідні значення індексів. Додатково, ініціюється ображений режим 434. Якщо роботизована життєва форма 20 падає і приземляється на сторону 436 свого хвоста, датчик 422 положення в просторі виявляє рух 424, напрямок 426 і прискорення 430, а також вхідний сигнал від датчика 60 торкання заду і датчика 62 торкання хвоста, впливаючи негативним чином на атрибути фізичного стану 324, здоров'я 328, настрою 322, емоцій 330 і покори 308. Асоціативно зв'язані індекси для цих атрибутів негайно піддаються негативному приросту, і ініціюється травмований режим 434. Якщо роботизована життєва форма 20 падає і приземляється на свій правий 438 або лівий бік 440, датчик 422 перевантаження виявляє рух 424, напрямок 426 і прискорення 430, а також вхідний сигнал від датчиків торкання тулуба, розташованих на боках 52, грудях 54, стегнах 58 6 UA 112526 C2 5 10 15 20 25 30 35 40 45 50 55 60 і/або ногах 38 і 40. Атрибути фізичного стану 324, здоров'я 328, настрою 322, емоцій 330 і покори 308 підпадають під негативний вплив, що дає в результаті негайний негативний приріст асоціативно зв'язаних індексів для цих атрибутів, в такому випадку ініціюючи травмований режим 434. Залежно від того, які датчики торкання активізуються, одна або більше ноги 38 або 40 можуть травмуватися, даючи в результаті роботизовану життєву форму 20, що шкутильгає на одну або більше ніг. Якщо роботизована життєва форма 20 струшується 442, датчик 422 положення в просторі виявляє рух 424, напрямок 426 і прискорення 430, а також вхідний сигнал з датчиків торкання тулуба, що негативно впливає на атрибути настрою 322, емоцій 330, покори 308 і характеру 306. Величина і швидкість, з якою можуть піддаватися негативному приросту асоціативно зв'язані індекси, наприклад, можуть змінюватися залежно від того, наскільки сильні, і тривалі струси або струшування. Якщо роботизована життєва форма 20 розгойдується 444 зі сторони в сторону або назад і вперед, датчик 422 положення в просторі виявляє рух 424, напрямок 426, положення 428 і прискорення 430, крім того виявляючи вхідний сигнал з датчиків торкання тулуба, впливаючи позитивним чином на атрибути настрою 322 і емоцій 330, і викликаючи приріст асоціативно зв'язаних індексів негайно або з часом. Якщо роботизована життєва форма 20 утримується своєю головою вгору 448, датчик 422 положення в просторі виявляє рух 424, напрямок 426 і положення 428, а також вхідний сигнал з датчиків торкання тулуба, впливаючи позитивним чином на атрибути настрою 322 і емоцій 330. Результатом є приріст асоціативно зв'язаних індексів з часом. Якщо роботизована життєва форма 20 утримується за хвіст 450, датчик 422 положення в просторі виявляє положення 428, і вхідний сигнал також приймається з датчика 62 торкання хвоста. Атрибути настрою 322, емоцій 330, покори 308 і характеру 306 підпадають під негативний вплив, даючи в результаті негативний приріст асоціативно зв'язаних індексів. Якщо роботизована життєва форма 20 є такою, що прямо стоїть 452 або, що лежить на боку 454, датчик 422 положення в просторі виявляє положення, а також вхідний сигнал з датчиків 72 і 74 торкання ступней або датчиків торкання тулуба. У цих положеннях, немає негативного або позитивного внеску у природжені 300 і неприроджені 320 атрибути. На закінчення, якщо роботизована життєва форма 20 ударяється 456, спочатку може прийматися вхідний сигнал датчика торкання, що супроводжується рухом 424, напрямком 426 і/або прискоренням 430, що виявляється датчиком 422 положення в просторі. Атрибути настрою 322 і емоцій 330 можуть підпадати під негативний вплив, даючи в результаті негайний негативний приріст асоціативно зв'язаних індексів. Повинно бути зрозуміло, що режими введення, ініційовані датчиком 422 положення в просторі і датчиками торкання, можуть змінюватися згідно з часом доби, температурою й іншою комбінацією подій. Наприклад, якщо роботизована життєва форма 20 підкидається і ловиться 446, але потім упускається, атрибути, що знаходяться під впливом, можуть перейти з позитивних в негативні, ініціюючи травмований режим 434. Однак, як тільки роботизована життєва форма 20 травмована, наприклад, асоціативно зв'язані атрибути можуть не підпадати під позитивний вплив похитуванням 444 або підкиданням і пійманням 446, дуже схоже на те, як тварина або вихованець не хотів би грати, коли травмований. Вхідні сигнали з ІЧ-датчиків 122 в комбінації зі зчитувачем 126 RFID ініціюють режими введення, зв'язані з прийняттям корму, грою і навчанням, які потім впливають на природжені 300 і неприроджені 320 атрибути. Коли зчитувач 126 RFID виявляє присутність RFID-мітки 127, і ІЧ-датчики не блоковані, 460 (фіг. 10D), роботизована життєва форма 20 може реагувати поіншому, ніж коли зчитувач 126 RFID виявляє наявність RFID-мітки, а ІЧ-датчики блоковані, 462 (фіг. 10C). Наприклад, якщо зчитувач 126 RFID (фіг. 1, 4 і 6) виявляє RFID-мітку здорового корму, коли має місце час харчування, або роботизована життєва форма голодна, 464 (фіг. 10D), і ІЧдатчики 122 не блоковані, то ініціюється режим 466 бажання поїсти. Якщо запропонована RFIDмітка здорового корму, 468 (фіг. 10C), яка виявлена зчитувачем 126 RFID, і ІЧ-датчики 122 тепер блоковані 462, роботизована життєва форма 20 буде приводити в дію сервопривід 86 пащі, щоб відкривати свою пащу 30 і приймати RFID-мітку здорового корму. Коли роботизована життєва форма 20 "їсть" здоровий корм 468, атрибути харчування 326 і фізичного стану 324 підпадають під позитивний вплив, збільшуючи асоціативно зв'язані індекси. Якщо виявлена RFID-мітка здорового корму зчитувачем 126 RFID, але якщо не прийшов час харчування, або роботизована життєва форма 20 не голодна 470, і ІЧ-датчики 122 не блоковані 460, ініціюється режим 475 відмови від їжі. Якщо запропонована RFID-мітка здорового корму, яка виявлена зчитувачем 126 RFID, і ІЧ-датчики 122 тепер блоковані, 462, роботизована життєва форма 20 буде активізувати 7 UA 112526 C2 5 10 15 20 25 30 35 40 45 50 55 сервопривід 90 шиї, щоб відвертати свою голову 22 від корму, утримуючи свою пащу 30 закритою. Якщо зчитувач 126 RFID виявляє RFID-мітку закусочного сурогатного корму, 474 (фіг. 10D), RFID-мітку фруктів, 476, або RFID-мітку гострого корму, таку як RFID-мітка 478 пекучого перцю, і ІЧ-датчики 122 не блоковані 460, ініціюється режим 466 бажання їсти. Якщо ІЧ-датчики 122 блоковані, і зчитувач 126 RFID виявляє закусочний сурогатний корм 480, фрукти 482 або гострий корм 484 (фіг. 10C), роботизована життєва форма 20 буде приводити в дію сервопривід 86 пащі, щоб відкривати пащу 30 для прийому корму. Будь-які з цих видів корму будуть збільшувати індекс атрибута 326 харчування. Однак, сурогатний корм 480 також може впливати негативним чином на атрибут 328 здоров'я, зменшуючи відповідний індекс. Фрукти 482 і гострий корм 484 будуть впливати позитивним чином на атрибути фізичного стану 324 емоцій 330, збільшуючи асоціативно зв'язані індекси. Але гострий корм 484 також може знижувати індекс атрибута 306 характеру. Якщо RFID-мітки 486 трави або мінералів запропоновані роботизованій життєвій формі 20, і ІЧ-датчики не блоковані, 460, ініціюється режим 488 відмови від їжі (фіг. 10D). Якщо запропоновані трава або мінерали 486, і ІЧ-датчики заблоковані, 462 (фіг. 10C), якщо роботизована життєва форма 20 не знаходиться в травмованому режимі 434, вона не буде відкривати свою пащу 30 і буде відвертати свою голову 22 від трави або мінералів 486. Якщо вона знаходиться в травмованому режимі 434 (фіг. 10B), коли запропонована трава або мінерали 486, вона не буде відвертати свою голову 22, але також може не відкривати свою пащу 30 негайно. Після представлення трави або мінералів 486 роботизованій життєвій формі 20, коли вона знаходиться в травмованому режимі 434, вона може активізувати свої сервоприводи 86 для відкривання своєї пащі 30. Коли датчик 126 RFID виявляє RFID-мітку трави або мінералів, 488, індекс атрибута 328 здоров'я може піддаватися приросту. Якщо роботизована життєва форма 20 примушується їсти або перегодовується, 490, коли вона сита, або за допомогою примусового відкривання її пащі 30 і вміщення RFID-мітки корму в її пащу 30, яка виявляється зчитувачем 126 RFID, атрибут 328 здоров'я підпадає під негативний вплив, і асоціативно зв'язаний індекс піддається негативному приросту. Якщо трава або мінерали 488 примусово згодовуються роботизованій життєвій формі 20, вона потім може поводитися хворою в межах ініціювання дії або реакції блювання. Якщо іграшка 492 для гри, такої як перетягування канату, виявлена зчитувачем 126 RFID, і ІЧ-датчики 122 не блоковані 460, сервопривід 86 пащі буде приводитися в дію для відкривання пащі 30, якщо роботизована життєва форма 20 бажає пограти, 494 (фіг. 10D). Якщо вона не хоче грати, сервопривід 86 пащі не буде приводитися в дію для відкривання пащі 30. Якщо RFID-мітка 496 палички для навчання (фіг. 10D) виявлена зчитувачем 126 RFID, і ІЧдатчики 122 не блоковані, 460, може ініціюватися режим 498 запису голосової команди, який може вказуватися приведенням в дію сервоприводів 118 і 120 хвоста 36, і сервоприводів 88 і 90 голови і шиї відповідно. Якщо паличка 496 для навчання виявлена зчитувачем 126 RFID, коли ІЧ-датчик заблокований, 462, сервопривід 86 пащі приводиться в дію для відкривання пащі 30. Якщо паличка 500 для навчання вміщена в пащу 30, як виявлено зчитувачем 126 RFID, паща 30 закривається за допомогою реверсування сервоприводу 86 пащі, щоб прийняти паличку 500 для навчання, та ініціюється процедура 502 запису голосової команди. У процедурі 502 запису голосової команди, мікрофон 128 приймає команди, наприклад, такі як "привіт", кличка роботизованої життєвої форми, "до мене", "засинай", "пограємо", "поїж", "поряд", "заспівай" і "станцюй", які обробляються модулем 129 розпізнавання голосу (фіг. 6). Інші команди можуть враховуватися або завчатися роботизованою життєвою формою 20. За допомогою повторення команди, роботизована життєва форма 20 "завчає" команду. Якщо виявлений звук, 504, і прийнятою командою є "привіт" 506 (фіг. 10F), ініціюється режим 508 голосової команди, в якому роботизована життєва форма 20 слухає інші команди. Якщо прийнята кличка роботизованої життєвої форми 510, індекси атрибута 330 емоцій і атрибута 308 покори піддаються приросту, та ініціюється режим 512 руху у відповідь. Як тільки ініційований режим 512 руху у відповідь, додержуються інші прийняті команди. Якщо режим 512 руху у відповідь не ініційований за допомогою прийому клички 510 вихованця до прийому іншої з команд, відповідь на команду може виводитися або може не виводитися залежно від природжених атрибутів 300 і поточного стану інших неприроджених атрибутів 320 в цей час. Якщо прийнята команда "до мене", 514 (фіг. 10F), то індекс атрибута 330 емоцій піддається перетворенню, та ініціюється режим "до мене". У режимі 516 "до мене", роботизована життєва форма 20, з використанням стереомікрофонів 128 на кожній стороні голови 22, переміщується у напрямку до джерела команди, а потім, зупиняється для очікування іншої команди. 8 UA 112526 C2 5 10 15 20 25 30 35 40 45 50 55 60 Якщо прийнята команда "засинай", 518, то індекс атрибута 330 емоцій збільшується, і ініціюється режим 520 "засинай". У режимі 520 "засинай" роботизована життєва форма 20 буде засинати по команді, якщо вона знаходиться у втомленому стані 324 атрибута фізичного стану. Інакше, вона може лягати, але може заснути або не заснути. Якщо прийнята команда "давай пограємо", 522, то індекс атрибута 330 емоцій збільшується, і ініціюється режим 524 "давай пограємо". У режимі 524 "давай пограємо" роботизована життєва форма 20 може виявляти цікавість до гри або стає більш активною або збудженою. Якщо прийнята команда "поряд", 530, то індекс атрибута 330 емоцій збільшується, й ініціюється режим 532 "поряд". У режимі 532 "поряд" роботизована життєва форма 20 буде йти за джерелом команди доти, доки звуки не приймаються протягом завчасно визначеного періоду часу, або доти, доки не розпочатий інший режим. Якщо прийнята команда "заспівай", 534, то індекс атрибута 330 емоцій збільшується, й ініціюється режим 536 "заспівай". У режимі 536 "заспівай" роботизована життєва форма 20 може виробляти музичні звуки через гучномовець 130. Якщо прийнята команда "станцюй", 538, то індекс атрибута 330 емоцій збільшується, й ініціюється режим 540 "станцюй". У режимі 540 танцю роботизована життєва форма 20 може танцювати під ритм музики, яку вона приймає через мікрофон 128. Всі з голосових команд і реакцій на них взаємозв'язані зі станом природжених атрибутів 300 і неприроджених атрибутів 320, а також іншими режимами. Наприклад, якщо голосова команда ще не була завчена при першому ініціюванні процедури 502 запису голосової команди, то режим, асоціативно зв'язаний з такою командою, не може ініціюватися, оскільки роботизована життєва форма 20 ще не знає і не розуміє команду. Подібним чином, якщо роботизована життєва форма 20 знаходиться в травмованому режимі 434, то, наприклад, вона не буде реагувати на команди "пограємо" 522 або "станцюй" 538. Або якщо атрибут 324 фізичного стану має значення виснажене або дуже виснажене, команда "до мене" 514, наприклад, може виконуватися тільки частково. Датчик 125 температури (фіг. 6) вимірює температуру оточуючого середовища. Нормальний робочий діапазон, наприклад, може бути приблизно від 50 °F (10 °C) до 104 °F (40 °C). Залежно від життєвої форми, її діапазон може значно змінюватися. Якщо температура знаходиться близько або вище верхньої температури, ініціюється режим введення перегрівання 550 (фіг. 10E), впливаючи негативним чином на атрибут 324 фізичного стану і атрибут 328 здоров'я, а також атрибут 306 характеру, даючи в результаті зниження асоціативно зв'язаних індексів з часом й ініціюючи режим 552 задишки. У режимі задишки паща 30 роботизованої життєвої форми відкривається сервоприводом 86 пащі і звук задишки видається динаміком 130. Якщо температура знаходиться близько або нижче нижньої температури, ініціюється режим введення дуже холодного 554, впливаючи негативним "чином" на атрибути фізичного стану 324 і здоров'я 328, зменшуючи асоціативно зв'язані індекси. Ініціюється режим 556 чхання/струшування, викликаючи дію чхання за допомогою руху сервоприводів голови 88 і шиї 89 і проводячи звук "чхання" з гучномовця 130 нарівні з відкриванням пащі 30. Струшування, наприклад, виконується швидким коливанням одного з сервоприводів 86, 88, 89, 98, 100, 108, 110, 112, 116, 118 і/або 120, і створенням звуку "струшування" з гучномовця 130. Камера 124, розташована на носі 26, виявляє рівні освітлення і руху. Якщо режим введення світла в денний час 560 (фіг. 10G) ініційований освітленням, виявленим камерою 124, вище визначеного попередньо порогового значення, протягом денного періоду, атрибут 330 емоцій підпадає під позитивний вплив, асоціативно зв'язаний індекс періодично збільшується. Денний період, наприклад, може бути від 8 годин ранку до 10 годин вечора, з відповідним нічним періодом з 10 годин вечора до 8 годин ранку. Якщо навколишнє освітлення падає нижче визначеного попередньо порогового значення протягом денного періоду, режим введення темряви в денний час 562 ініціюється, впливаючи негативним чином на атрибут 330 емоцій і асоціативно зв'язаний індекс, даючи в результаті ініційований режим 564 спокою. У режимі 564 спокою, роботизована життєва форма 20, наприклад, може укладати свою голову 22 і/або закривати свої очі 28. Режим введення темряви в денний час 562 також може впливати негативним чином на атрибути активності 304 і настрою 322. Якщо навколишнє освітлення, виявлене камерою 124, знаходиться вище визначеного попередньо порогового значення вночі, наприклад, може ініціюватися режим введення світла в нічний час 566, негативно впливаючи на атрибут 330 емоцій, а також атрибути настрою 322 і характеру 306. Може ініціюватися тривожний режим 568, наприклад, в якому роботизована життєва форма 20 може виявляти дезорієнтацію, хвилювання і/або не реагуючу поведінку. Якщо навколишнє освітлення, виявлене камерою 124 знаходиться нижче визначеного попередньо рівня вночі, режим введення темного нічного часу 570 може ініціюватися, 9 UA 112526 C2 5 10 15 20 25 30 35 40 45 50 55 60 впливаючи позитивним чином на атрибут 330 емоцій, негативно впливаючи на атрибут 304 активності і викликаючи режим 572 сну. У режимі 572 сну, наприклад, роботизована життєва форма 20 може смикати, рухати однією або більше ногами 38 і 40, своєю головою 22, шиєю 32 і/або хвостом 36 і може перекидатися або змінювати положення сну. Порогове значення рівня освітлення може змінюватися згідно з часом дня. Наприклад, порогове значення може циклічно змінюватися від низького значення, відповідного найбільш темній годині ночі близько 3 годин ранку, зростаючи до високого значення, відповідного найбільш яскравій годині дня близько 1 години дня, потім, знову знижуючись до низького значення. Якщо камера 124 виявляє переміщення об'єкта, може ініціюватися режим введення рухомого об'єкта 574, ініціюючи режим 576 стеження головою, в якому приводи голови 88 і шиї 89 приводяться в рух для відстеження або супроводу рухомого об'єкта. Носові ІЧ-датчики 122 виявляють присутність об'єкта, такого як корм перед роботизованою життєвою формою 20, а також інші перешкоди і межі. Якщо ІЧ-датчики 122 виявляють об'єкт перед роботизованою життєвою формою 20, який не має RFID-мітки, розпізнаваної зчитувачем 126 RFID, режим введення передньої перешкоди 578 може ініціюватися, даючи в результаті ініціювання зворотного/поворотного режиму 580 (фіг. 10H). В зворотному/поворотному режимі 580 роботизована життєва форма 20 може випадковим чином повертати ліворуч або праворуч, відійти назад, а потім, повертати ліворуч або праворуч, щоб уникнути виявленого об'єкта. Якщо ІЧ-датчики 122 виявляють межу, наприклад, таку як край стола або край сходинки, режим введення виявлення крутого схилу, 582, може ініціюватися, спричиняючи ініціювання режиму 584 відходу назад. У режимі 584 відходу назад, роботизована життєва форма 20 може зупинятися і відступати від виявленої межі, а потім повертати ліворуч або праворуч, щоб сторонитися межі. Години 600 реального часу починають роботу з вихідного включення харчування роботизованої життєвої форми 20 і продовжують йти в фоновому режимі, видаючи часові інтервали для внутрішніх тактових сигналів і ініціюючих сигналів, таких як режим 560 введення світла в денний час. Додатково, години 600 реального часу ініціюють зміни періодів життя кожні три роки 602 роботи, які ініціюють віковий режим 604 (фіг. 10I). Режим 604 віку, наприклад, може включати в себе періоди життя, такі як новонароджений, юний, зрілий і немолодий. У перший період життя роботизована життєва форма 20 спочатку відкриває свої очі 28 і починає пристосовуватися до свого оточуючого середовища завдяки її датчикам 404 торкання, мікрофонів 128, ІЧ-датчиків 122, камери 128, датчика 422 положення в просторі й датчика 125 температури, а також її природженим атрибутам 300. Під час першого періоду роботизована життєва форма 20 починає взаємодіяти зі своїм оточуючим середовищем, демонструючи основні поведінки, наприклад, такі як стояче положення, ходьба, голод і допитливість. Роботизована життєва форма 20 може охоплюватися дрімотою протягом дня під час першого періоду. У другому періоді роботизована життєва форма 20 може виявляти велику допитливість, інтерес і здатність завчати команди, ставати більш грайливою і демонструвати до деякої міри непередбачувану поведінку і характер. У третьому періоді роботизована життєва форма 20 може демонструвати тривале навчання і виховання за допомогою взаємодій. Унікальна і розпізнавана індивідуальність, індивідуальні вдача і поведінка можуть розвиватися так само, як повний діапазон рухів тіла і соціальних поведінок. У четвертому періоді роботизована життєва форма 20 може виявляти ознаки старіння, наприклад, такі як, не настільки активне існування, більш повільні і менш координовані рухи, схильність легше захворювати, підвищена чутливість до коливань температури і вимога більшого сну або дрімоти. Протягом всіх періодів свого життя "голос" роботизованої життєвої форми може змінюватися, так само як її "слух" і "зір". Через рівні проміжки часу на основі годин 600 реального часу ініціюється режим 606 введення пробудження, який ініціює режим 608 пробудження, щоб будити роботизовану життєву форму 20 кожний ранок у вказаний час або в різний час, на основі атрибутів фізичного стану 324, здоров'я 328 і настроїв 322. Датчик 610 напруги акумуляторної батареї контролює рівень напруги акумуляторної батареї. Якщо напруга акумуляторної батареї падає нижче визначеного попередньо рівня, ініціюється режим 612 введення низької напруги, який ініціює режим 614 відключення для відключення роботизованої життєвої форми 20. Доти, доки рівень напруги знаходиться нижче визначеного попередньо рівня, роботизована життєва форма 20 буде залишатися в стані відключення і не може включатися назад. З посиланням на фіг. 4, 6 і 12, мікропроцесорний блок 206 керування включає в себе порти 620 введення, які приймають вхідні сигнали з модуля 129 розпізнавання голосу, який 10 UA 112526 C25 10 15 20 25 30 35 40 45 50 55 60 приєднаний до мікрофонів 128; датчика 422 положення в просторі; процесора 43 датчиків торкання, приєднаного до датчиків 41 торкання; ІЧ-модуля 121, приєднаного до ІЧпередавачів/приймачів 122; модуля 128 камери, приєднаного до камери 124; логічного модуля 622; модуля/датчика 125 температури; зчитувача 126 і процесора 624 RFID; логіки 626 перевірки положення. На основі зовнішніх вхідних сигналів 400, прийнятих через порти 620 введення, індекси 332 збудження оновлюються 628 на основі природжених атрибутів 300, неприроджених атрибутів 320 і різних ініційованих режимів 402 введення. Індекси 336 збудження анімації вибираються 630 і пріоритезуються, і групи анімації вибираються 328 з бібліотечних файлів 632. Вибрані анімації відправляються в порти 634 виведення, які виводяться в MCU 636 контролера електродвигуна і звуковий модуль 131, приєднаний до гучномовця 130. Контролери 636 електродвигунів видають специфічну керуючу інформацію на вибрані сервоприводи 638 на основі вибраних анімацій, які зчитуються шифратором 640 положень, асоціативно зв'язаним з кожним сервоприводом, відправляються в логіку 626 перевірки положення і подаються зворотно в порти 620 введення MCU 206. Ця інформація про положення використовується привідною логікою для визначення поточної конфігурації роботизованої життєвої форми 20 і планування наступного руху. З посиланням на фіг. 4, 6 і 11 зразкова логічна блок-схема послідовності операцій способу для обробки вхідних сигналів датчиків загалом вказана номером 650 посилання. Вхідні сигнали датчиків приймаються портами 620 введення MCU 206. Якщо приймається звуковий вхідний сигнал 652, MCU 206 визначає нерухомий/безмовний стан роботизованої життєвої форми 20. Якщо стан є нерухомим і/або безмовним 656, то визначається рівень звуку, 658. Якщо рівень звуку високий, 660, то виконується перелякана анімація, 662, і атрибут 330 емоції підпадає під негативний вплив. Якщо рівень шуму не гучний 664, анімація 666 виявленого звуку виконується за допомогою MCU 206. Якщо стан не є нерухомим і/або безмовним, 668, то MCU 206 визначає, чи є прийнятий звук звуковим кодом 670. Якщо виявлений звуковий код, 672, то MCU 206 виконує анімації, асоціативно зв'язані з прийнятим звуковим кодом, 674. Якщо звуковий код не прийнятий 676, то послідовність операцій закінчується. Якщо ІЧ-датчик 122 пащі активізований, то MCU 206 визначає, чи знаходиться система в режимі участі в грі, такому як перетягування канату, 678. Якщо ініційований режим 492 введення перетягування канату, 680, то ініціюється режим 494 участі в грі. Якщо не в режимі 682 участі в грі, MCU 206 перевіряє вхідний сигнал 684 процесора 624 RFID. Якщо виявлена RFID-мітка 127 об'єкта, 686, то асоціативно зв'язана анімація виконується, 688, за допомогою MCU 206. Якщо RFID-мітка 127 об'єкта не виявлена, 690, то асоціативно зв'язана анімація поїдання корму виконується, 692, за допомогою MCU 206. Якщо активізований датчик ступні, 694, то асоціативно зв'язана анімація опускання на землю, така як ходьба або танець, 696, виконується за допомогою MCU 206. Датчики ступней, наприклад, можуть бути перемикачами 72 і 74 або можуть бути ІЧ-датчиками для визначення відстані від об'єкта або поверхні. Якщо вхідний сигнал датчика 422 положення в просторі приймається портами 620 введення MCU 206, асоціативно зв'язані рухові анімації 698 виконуються за допомогою MCU 206. З посиланням на фіг. 12 зразкова логічна блок-схема послідовності операцій способу для модуля розпізнавання голосу загалом вказана номером 700 посилання. Мікрофони 128, розташовані по кожну сторону голови 22 роботизованої життєвої форми, приймають звуки, які видаються в модуль 129 розпізнавання голосу (фіг. 6). Модуль 129 розпізнавання голосу аналізує кожний вхідний сигнал з мікрофонів 128 щодо специфічних мовних образів, таких як кличка 702 роботизованої життєвої форми, яка завчена і збережена. Якщо проаналізований звуковий образ не співпадає з мовним образом 704 клички, послідовність операцій повертається в початок, щоб аналізувати наступний звуковий образ. Якщо проаналізований звуковий образ співпадає з мовним образом для клички 706 роботизованої форми життя, то аналізується наступний звуковий образ 703. Якщо наступний звуковий образ не є дійсною командою, 710, то виконується анімація таймаута, 712, і послідовність повертається, 714, для прийому ще одного звукового образу 708. Якщо наступний звуковий образ не є дійсною командою, 710, і анімація таймаута закінчилася 712, послідовність операцій повертається, 716, до початку 702. Якщо дійсна команда 708 розпізнана, 718, то асоціативно зв'язана анімація вибирається і виконується, 720, і послідовність операцій повертається в початок. З посиланням на фіг. 4, 6, 8, 10 і 13, блок-схема послідовності операцій способу для модуля обробки корму загалом вказана номером 750 посилання. Зчитувач 126 і процесор 624 RFID пасивно чекають ініціюючого сигналу RFID корму, 752. Доти, доки ініціюючий сигнал RFID не виявлений, 754, модуль 750 обробки корму залишається в стані 752 очікування. Якщо ініціюючий сигнал RFID виявлений, 756, RFID-код перевіряється для визначення типу 11 UA 112526 C2 5 10 15 20 25 30 35 40 45 50 55 60 виявленого корму, 758. Якщо виявлена RFID-мітка 760 необхідного для здоров'я корму, 762, то перевіряється значення індексу атрибута 326 корму, 764. Якщо індекс атрибута 326 корму є низьким 766, наприклад, знаходиться між 1 і 3, які мають значення пріоритету А, то ініціюється анімація поїдання, 768, де ініціюється режим 464 введення голоду, ініціюючий режим 466 бажання є. З RFID-міткою 760 здорового корму, виявленої зчитувачем 126 і процесором 624 RFID, режим 466 бажання їсти ініціює режим введення здорового корму 468. Індекси як атрибута 326 харчування, так і атрибута 324 фізичного стану збільшуються, 768, і послідовність операцій закінчується 770. Якщо індекс харчування не є низьким, 772, індекс атрибута 326 харчування перевіряється, щоб визначити, чи є він значенням 4 індексу часу харчування, 774. Якщо він має значення часу харчування, 776, то ініціюється анімація 768 поїдання, як описано вище, і послідовність операцій закінчується, 770. Якщо він не має значення часу 778 харчування, зі здоровим кормом, ініціюється режим 470 введення не часу харчування і не голодного, ініціюючи режим 472 відмови від їжі і анімацію 780 без їжі. Потім, послідовність операцій закінчується. Якщо індекс харчування не є низьким, 772, індекс атрибута 326 харчування перевіряється, щоб визначити, чи є він значенням 4 індексу часу харчування, 774. Якщо він має значення часу харчування, 776, то ініціюється анімація 768 поїдання, як описано вище, і послідовність операцій закінчується, 770. Якщо він не має значення часу 778 харчування, зі здоровим кормом, ініціюється режим введення 470 не часу харчування і не голодного, ініціюючи режим 472 відмови від їжі і анімацію 780 без їжі. Потім послідовність операцій закінчується, 782. Якщо виявлений тип корму, 758, є RFID-міткою 784 легкої закуски, вибирається тракт вибору легкої закуски, 786. Анімація 788 поїдання ініціюється в тих випадках, коли ініціюється режим 474 введення неблокованого ІЧ-випромінювання закусочного сурогатного корму, ініціюючи режим 466 бажання їсти, та ініціюється режим введення 480 блокованого ІЧ-випромінювання закусочного сурогатного корму. Індекс атрибута 326 харчування збільшується нарівні з тим, що індекс 320 атрибута здоров'я піддається негативному приросту. Потім, послідовність операцій модуля обробки корму закінчується, 790. Якщо RFID-мітка 792 з меншою частиною трави, 758, то вибирається тракт 794 обробки трави. Потім, зчитується індекс атрибута 328 здоров'я, 796. Якщо індекс атрибута 328 здоров'я є низьким, 798, наприклад, що має значення індексу від 1 до 4, то виконується анімація 800 поїдання, де ініціюється режим 486 введення неблокованих ІЧ-випромінюванням трави/мінералів, на початку приводячи до ініціювання режиму 488 відмови від їжі. Оскільки індекс атрибута 328 здоров'я є низьким, якщо запропонована RFID-мітка 792 трави з блокуванням ІЧ-датчиків 122, режим 488 введення трави/мінералів ініціюється, з приростом індексу атрибута 328 здоров'я. Потім, модуль обробки корму зупиняється, 802. Якщо індекс атрибута 328 здоров'я не є низьким 804, ініціюється анімація 780 без їжі, і обробка закінчується, 782. З посиланням на фіг. 4, 6, 8, 10 і 14, блок-схема послідовності операцій способу ініціюючого сигналу торкання загалом вказана номером 850 посилання. Процесор 43 торкання чекає вхідного сигналу 852 з будь-яким з сенсорних майданчиків 41. Якщо не прийнято ніяких вхідних сигналів, 854, послідовність 850 операцій знаходиться в стані очікування. Якщо прийнятий сенсорний вхідний сигнал, 856, процесор 43 визначає тип ініціюючого сигналу по місцеположенню сигналу, послідовності і часу спрацювання для визначення, чи є ініціюючий сигнал пещенням, ударом або торканням, 858. Якщо ініціюючий сигнал є торканням, 860, визначається датчик 404 торкання для ініціювання асоціативно зв'язаного режиму 402 введення. Наприклад, якщо пещення визначене таким, що відбувається вздовж спини 50 роботизованої життєвої форми, ініціюється режим 406 введення вихованця вздовж його спини, й індекси збудження настрою й індекси емоційного збудження підпадають під позитивний вплив, 862. Ініціюються асоціативно зв'язані анімації, 864, і обробка закінчується, 866. Якщо ініціюючий сигнал є ударом 868, режим 418 введення удару куди-небудь ініціюється, впливаючи негативним чином на атрибути настрою 322 і характеру 306, причому атрибут 308 покори підпадає під негативний вплив, 870. Асоціативно зв'язані анімації є типовими, 872, і обробка закінчується, 866. Якщо ініціюючий сигнал є торканням 874, асоціативно зв'язані анімації відповідають місцеположенню торкання, 876. Обробка закінчується, 866. Роботизована життєва форма 20 за даним винаходом є автономною істотою зі складною архітектурою програмного забезпечення, яка дає роботизованій життєвій формі 20 можливість завчати і розуміти голосові команди, виражати настрої та емоції, реагувати на різні види корму, мати уявлення про час - дня і ночі, сприймати спеку і холод, ставати втомленим, мати шкіряну чутливість, мати відчуття орієнтації і руху, реагувати на все оточуюче середовище. 12 UA 112526 C2 5 10 15 20 25 30 35 40 45 50 55 Роботизована життєва форма 20 може відчувати і передавати емоції, бути такою, що усвідомлює саму себе і взаємодіяти зі своїм оточуючим середовищем, і навчатися і розвивається з часом. Хоча роботизована життєва форма 20 в переважному варіанті здійснення зображена як камаразавр, вона не повинна обмежуватися їм. Роботизована життєва форма 20 може втілювати багато які різні життєві форми, якісь минулі або дані, якісь повністю нові. З роботизованою життєвою формою 20 потрібно поводитись обережно, як з будь-якою живою істотою. Датчики 41 торкання, що покривають тіло роботизованої життєвої форми, виявляють різні дотики, які можуть впливати на поведінку роботизованої життєвої форми 20. Роботизована життєва форма 20 включає в себе джерело харчування у вигляді акумуляторної батареї, що перезаряджається для харчування MCU 106, схем і сервоприводів. Роботизована життєва форма 20 також включає в себе порт міні-USB і карту пам'яті мікро-SD для оновлень програмного забезпечення і обміну інформацією з MCU 106, і синхронізації часу для настройки свого внутрішнього часу на теперішній час. Коли роботизована життєва форма 20 піддається включенню харчування в перший раз, їй може бути потрібен деякий час, щоб прокинутися і реагувати на своє оточуюче середовище. Як "новонароджена" роботизована життєва форма 20, вона може спати довше вдень і бути несхильною грати або взаємодіяти під час годин сну. Ця сонна поведінка може продовжуватися протягом її новонародженого і немолодого періодів. У перші декілька днів "життя", роботизована життєва форма 20 може відкривати свої очі, моргати і озиратися навколо в своєму новому оточуючому середовищі, потягуватися і видавати крик, і кричати, коли вона голодна. До закінчення свого новонародженого періоду, роботизована життєва форма 20 може робити свої перші нетверді і невпевнені дитячі кроки, починати обстежувати своє оточуюче середовище, одержувати більш короткий сон і демонструвати більш широкий діапазон настроїв і емоцій у відповідь на взаємодію зі своїм оточуючим середовищем і власником. Як тільки роботизована життєва форма 20 демонструє юну поведінку, вона може бути готова навчатися. Першим, що повинна завчити роботизована життєва форма 20, є її кличка. Щоб завчити свою кличку, ідентифікаційна карта з RFID-міткою може розміщуватися під підборіддям 31 роботизованої життєвої форми, щоб розпізнаватися зчитувачем 126 RFID. Як тільки розпізнана, роботизована життєва форма 20 може відображати поведінку вдячності, таку як виляння своїм хвостом 36 і відкривання своєї пащі 30. Коли ідентифікаційна карта вміщена в пащу 30 роботизованої життєвої форми, вона може закривати свою пащу 30 і демонструвати поведінку схвалення, видаючи задоволені або радісні звуки, похитуючи своєю головою назад і вперед, потім, чекаючи, щоб почути і завчити кличку, яку власник вибрав для неї. Якщо вибрана кличка роботизованої життєвої форми вимовлена голосно і чітко, роботизована життєва форма 20 може виляти своїм хвостом, похитувати своєю головою назад і вперед, а потім, випускати ідентифікаційну карту, щоб указати, що вона завчила свою кличку. Роботизована життєва форма 20 може бути перейменована за допомогою повторення цієї процедури. Роботизована життєва форма 20 може бути навчена слухати і запам'ятовувати голосові команди. Одна або більше навчальних RFID-міток можуть використовуватися, щоб ініціювати навчання роботизованої життєвої форми 20 для завчання голосових команд. RFID-мітка навчання загального призначення може використовуватися для ініціювання вивчення голосових команд, або спеціальні RFID-мітки можуть використовуватися для вивчення спеціальних команд. Наприклад, для навчання команді 514 "до мене" і команди 522 "давай пограємо", може використовуватися єдина RFID-мітка, яка розпізнається зчитувачем 126 і процесором 624 RFID, щоб ініціювати процес навчання. Як альтернатива, унікальна RFID-мітка може використовуватися для навчання кожній команді. За допомогою використання унікальної RFIDмітки для навчання специфічній команді, роботизована життєва форма 20 може навчатися попередньо запрограмованій команді на будь-якій мові. За допомогою здійснення процесу навчання для специфічної команди і навчання такому звуковому образу для команди, що завчається, голосова команда може настроюватися керуватися власником. Як тільки команда була завчена роботизованою життєвою формою 20, вона може махати своїм хвостом 36, діяти стурбовано, похитуючи своєю головою 22 зі сторони в сторону і випускати завчену RFID-мітку. Щоб роботизована життєва форма 20 виконувала голосову команду, може бути необхідним спочатку привернути її увагу за допомогою прослуховування нею своєї клички. Коли роботизована життєва форма 20 чує свою кличку, вона може вставати нерухомо і подивитися в напрямку звуку. Залежно від значень індексів і значення індексу атрибута 308 покори, роботизована життєва форма 20 може реагувати на голосову команду виконанням голосової команди. 13 UA 112526 C2 5 10 15 20 25 30 35 Роботизована життєва форма 20 використовує вхідний сигнал свого датчика 422 положення в просторі в комбінації зі своїми датчиками 41 торкання і ножними перемикачами 72 і 74 для визначення орієнтації і руху. Коли зайняті один або більше ножних перемикачів 72 і/або 74, MCU 206 визначає, що роботизована життєва форма 20 знаходиться в контакті з поверхнею. Крім того, по мірі того, як роботизована життєва форма 20 рухається або ходить, зворотний зв'язок, що приймається з шифратора 670 положення і логіки перевірки 626 положення, а також ножних перемикачів 72 і 74, використовується MCU 206 для визначення положення і напрямку переміщення роботизованої життєвої форми 20. Функція датчика 428 положення у датчика 422 положення в просторі видає інформацію про орієнтацію в MCU 206, яка використовується з вхідним сигналом датчика 41 торкання для визначення, чи утримується роботизована життєва форма 20 вгору своєю головою 22 або вгору своїм хвостом 36. Вхідний сигнал з датчика 62 торкання хвоста і функція датчика 428 положення у датчика 422 положення в просторі, можуть використовуватися MCU 206 для визначення, що роботизована життєва форма 20 утримується за хвіст, з формуванням належної реакції, наприклад, такої як рух, що відбивається, і завивання. Гойдальний рух може виявлятися функціями датчика 424 руху, датчика 430 прискорення і датчика 426 напрямку у датчика 422 положення в просторі. Наприклад, гойдальний рух виявляється, в той час як датчик 422 положення в просторі виявляє рух головним чином в площині X або Z, або деякій їх комбінації, з деяким відхиленням по осі Y, що передбачає по суті горизонтальну дугу, позитивне прискорення, що супроводжується негативним прискоренням, потім, різка зміна напрямку на піковому значенні по осі Y. Гойдальний рух ймовірно повторюється протягом періоду часу, даючи в результаті приріст індексів атрибутів настрою 322 і емоцій 330. MCU 206 може виробляти реакцію, таку як виляння хвостом, задоволений звук і утримання голови 22 роботизованої форми життя вгорі. Подібним чином, подія падіння може виявлятися датчиком 424 руху, датчиком 430 прискорення і датчиком 426 напрямку у датчика 422 положення в просторі. Коли роботизована життєва форма 20 піддається падінню, датчик 422 положення в просторі виявляє рух по осі Y в негативному напрямку, і позитивне прискорення, що супроводжується різкою зупинкою, і вхідні сигнали з різних датчиків 41 торкання, що активізуються залежно від ділянок, які ударяються об землю. Залежність від амплітуди удару, визначеної часом падіння і датчики 41 торкання, що активізуються можуть визначати, чи травмована роботизована життєва форма 20, і якщо так, наскільки серйозно і в якій частині(ах), або вона тільки налякана. Падіння роботизованої життєвої форми 20 може давати в результаті негативний вплив на атрибути фізичного стану 324, здоров'я 328, настрою 322, емоцій 330 і покори 308. Зовнішня реакція за допомогою MCU 206, наприклад, може включати в себе сіпання тіла, опущену голову 22 і хвіст 36, напівприкриті очі 28 і пхикаючий звук для вказівки пошкодження. Повинно бути зрозуміло, що, незважаючи на те, що деякі форми цього винаходу були проілюстровані і описані, він не обмежений ними крім тих випадків, коли і в тій мірі, в якій такі обмеження включені в подальшу формулу винаходу. 40 ФОРМУЛА ВИНАХОДУ 45 50 55 60 1. Роботизована життєва форма, яка реагує на навколишнє середовище, яке змінюється, що сприймається згаданим роботом, причому згаданий робот містить: тіло робота, яке імітує молодого камаразавра, яке шарнірно зчленоване для руху вгору і вниз у вертикальній площині і зі сторони в сторону в горизонтальній площині і підтримується передніми і задніми ногами, які закінчуються відповідними лапами, кожна із згаданих ніг має щонайменше два з'єднання, згадане тіло має шию, яка закінчується головою, забезпеченою очима і пащею, внутрішні і зовнішні датчики введення, які розташовані на згаданому тілі робота і реагують на торкання, звук і умови освітлення, рух, корм, температуру, голосові команди, час доби, а також перешкоди і небезпеки, в тому числі датчик торкання голови, множину датчиків торкання, розподілених по тулубу згаданого тіла, і множину датчиків торкання на згаданих лапах, засіб, який реагує на згадані датчики, для визначення рівнів індексів збудження відповідно до критеріїв пріоритету, вибраних з множини груп невроджених анімацій, що містять настрій тіла робота, який відповідає одному з множини рівнів індексів збудження від сумного до веселого, фізичний стан робота, що відповідає одному з множини рівнів індексів збудження від знесиленого або сонного до енергійного, стан тіла робота, що визначається рівнями індексів збудження кормом від голодного до перегодованого і перенасиченого, рівнями індексів збудження здоров'я від хворобливого до здорового і рівнями індексів збудження емоцій тіла робота від полохливого до збудженого, і 14 UA 112526 C2 5 10 15 20 25 30 35 40 45 50 55 60 множину сервоприводів, які зв'язані зі згаданим тілом робота і реагують на переважаючі індекси збудження для спонукання робота виконувати анімації, що є їх результатом, і є сумісними з вродженими атрибутами статі, активності, характеру, підкорення, тембру, шумності і кмітливості, при цьому один або більше із згаданих вроджених атрибутів встановлюються випадковим чином в рамках визначеного діапазону для кожного зі згаданих атрибутів статі, активності, характеру, покори, тембру, шумності і кмітливості. 2. Роботизована життєва форма за п. 1, в якій перший із згаданих приводів керує згаданими очима робота, другий із згаданих приводів керує відкриванням і закриванням згаданої пащі, третій із згаданих приводів керує рухом згаданої голови, четвертий із згаданих приводів керує рухом шиї відносно тулуба, а п'ятий із згаданих приводів керує відносним рухом передньої і задньої частин тулуба, щоб спонукати тулуб повертатися і звиватися, тим самим, видаючи схожі на живі реакції на сприйняті умови. 3. Роботизована життєва форма за п. 1, що додатково містить засіб в згаданому роботі, що встановлює природжені атрибути, в тому числі стать, активність, характер, покору, тембр, шумність і кмітливість. 4. Роботизована життєва форма за п. 1, в якій згаданий робот має чоловічу стать, що відрізняється спритністю, поганим характером, упертістю, низьким тембром, високою шумністю і низькою кмітливістю, або згаданий робот має жіночу стать, що відрізняється повільністю, хорошим характером, упертістю, високим тембром, високою шумністю і високою кмітливістю, або згаданий робот є безстатевим та відрізняється нормальною активністю, характером, покорою, тембром, шумністю і кмітливістю. 5. Роботизована життєва форма за п. 1, в якій згадане тіло робота забезпечене акустичним датчиком, засобом, який реагує на гучні звуки для відтворення переляканих анімацій і оновлення індексів поведінки, відтворення анімацій, що виявляються звуком, у відповідь на більш низькорівневі звуки, або анімацій, пов'язаних з прийнятим звуковим кодом. 6. Роботизована життєва форма за п. 1, в якій згадані датчики введення включають в себе інфрачервоний датчик пащі, інфрачервоні датчики лап і датчик положення в просторі для ініціювання відтворення анімацій у відповідь на датчики пащі і лап і анімацій, пов'язаних зі спрямованим впливом і переміщенням. 7. Роботизована життєва форма за п. 1, що додатково включає в себе засіб для виконання ігрових анімацій у відповідь на виявлену голосову команду. 8. Роботизована життєва форма за п. 1, в якій згадані датчики введення реагують на ласку позитивно і оновлюють індекси збудження настрою й емоційного збудження, реагують на удар негативно оновленням індексів збудження настрою, емоційного збудження і збудження роздратування з негативним ефектом і оновленням відповідних індексів збудження, і реагують на торкання ініціюванням анімацій, відповідних місцеположенню сигналу торкання. 9. Роботизована життєва форма за п. 1, в якій згадане тіло робота має хвіст, шарнірно зчленований для руху відносно згаданого тіла, а також сервопривід руху хвоста вгору-вниз для руху по вертикальній осі і сервопривід руху хвоста зі сторони в сторону для руху по горизонтальній осі, що зв'язують хвіст із задньою частиною згаданого тулуба у відповідь на вихідне збудження. 10. Роботизована життєва форма за п. 1, в якій згадане тіло робота має чоловічі природжені атрибути спритності, поганого характеру, упертості, низького тембру, високої гучності і низької кмітливості, або згадане тіло робота має безстатеві природжені атрибути нормальних активності, характеру, покори, тембру, шумності і кмітливості, або згадане тіло робота має жіночі природжені атрибути і є тихим, з хорошим характером, покорою, з високим тембром, низькою шумністю і високою кмітливістю. 11. Роботизована життєва форма за п. 1, в якій згаданий настрій робота має рівні індексів збудження від дуже сумного до дуже веселого, рівні індексів збудження фізичного стану від дуже виснаженого або сонного до дуже енергійного, рівні індексів харчування від дуже голодного до перегодованого і перенасиченого, рівні індексів здоров'я від дуже хворого до дуже здорового і рівні емоційних індексів від дуже полохливого або злого до дуже збудженого, і включає в себе логіку вибору групи анімацій, що реагує на згадані рівні індексів. 12. Роботизована життєва форма за п. 1, що додатково містить ініціатори датчиків, які реагують на звук, ІЧ-датчик пащі, ІЧ-датчики лап і датчик положення в просторі для ініціювання відповідних анімацій. 13. Роботизована життєва форма за п. 1, що додатково включає в себе засіб для розпізнавання клички роботизованої життєвої форми й ініціювання ігрових анімацій, пов'язаних з виявленою голосовою командою. 15 UA 112526 C2 5 10 15 20 25 30 35 14. Роботизована життєва форма за п. 1, що додатково включає в себе засіб, який реагує на ініціюючий сигнал RFID корму, для визначення типу корму і оновлення індексів збудження з відповідними позитивними або негативними ефектами, і/або згаданий робот забезпечений засобом, який реагує на ініціюючий сигнал RFID корму для визначення, чи є корм здоровим, закусочним, рослинним або лікувальним, і позитивного або негативного реагування залежно від визначених індексів збудження харчування, і/або включає в себе модуль обробки корму, який реагує на ініціюючий сигнал RFID для визначення, чи є корм необхідним для здоров'я, закусочним, рослинним або лікувальним, і оновлення індексів збудження з відповідним позитивним чи негативним ефектом. 15. Автономний, персональний роботизований компаньйон, який імітує живу істоту, що реагує на навколишнє середовище, що змінюється, яке сприймається згаданим роботом, причому згаданий робот містить: тіло робота, що імітує молодого камаразавра, яке шарнірно зчленоване для руху вгору і вниз і зі сторони в сторону і підтримується передніми і задніми ногами, які закінчуються відповідними лапами, кожна зі згаданих ніг має щонайменше два з'єднання, згадане тіло має шию, що закінчується головою, забезпеченою очима і пащею, причому згадане тіло робота має вроджені атрибути, у тому числі стать, активність, характер, покору, тембр, гучність і кмітливість, внутрішні і зовнішні датчики введення, які розташовані на згаданому тілі робота і реагують на дотик, звук і умови освітлення, рух, корм, температуру, голосові команди, час доби, а також перешкоди і небезпеки, в тому числі датчик торкання голови, множину датчиків торкання, розподілених по тулубу згаданого тіла, і множину датчиків торкання на згаданих лапах, засіб, що реагує на згадані датчики, для визначення рівнів індексів збудження відповідно до критеріїв пріоритету, вибраних з множини груп невроджених анімацій, які містять настрій тіла робота, відповідний одному з множини рівнів індексів збудження від сумного до веселого, фізичний стан робота, відповідний одному з множини рівнів індексів збудження від виснаженого або сонного до енергійного, стан тіла робота, який визначається рівнями індексів збудження кормом від голодного до перегодованого і пересиченого, рівнями індексів збудження здоров'я від хворобливого до здорового і рівнями індексів збудження емоцій тіла робота від полохливого до збудженого, і множину сервоприводів, які пов'язані зі згаданим тілом робота і реагують на переважаючі індекси збудження для спонукання робота виконувати анімації, які є їх результатом, і сумісні зі згаданими вродженими атрибутами статі, активності, характеру, покори, тембру, шумності і кмітливості, при цьому один або більше із згаданих вроджених атрибутів встановлюються випадковим чином в рамках визначеного діапазону для кожного зі згаданих атрибутів статі, активності, характеру, покори, тембру, шумності і кмітливості. 16 UA 112526 C2 17 UA 112526 C2 18 UA 112526 C2 19 UA 112526 C2 20 UA 112526 C2 21 UA 112526 C2 22 UA 112526 C2 Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 23
ДивитисяДодаткова інформація
Назва патенту англійськоюAutonomous robotic lefe form
Автори англійськоюWong, Sui, Kay, Cheung, Kwok, Yau
Автори російськоюВонг Суй Кай, Чеунг Квок Яу
МПК / Мітки
МПК: G06N 3/00, A63H 11/20, A63H 11/04
Мітки: форма, роботизована, життєва, автономна
Код посилання
<a href="https://ua.patents.su/25-112526-avtonomna-robotizovana-zhittehva-forma.html" target="_blank" rel="follow" title="База патентів України">Автономна роботизована життєва форма</a>
Безалкогольний соковий напій “життєва сила”
Номер патенту: 84765
Опубліковано: 25.10.2013
Автори: Іванова Вікторія Джанівна, Чижук Олена Євгенівна, Ясінська Ірина Леонідівна
МПК: A23L 2/02
Мітки: життєва, напій, сила, соковий, безалкогольний
Формула / Реферат:
Безалкогольний соковий напій, що містить сік грейпфрута, цукор, аскорбінову кислоту, підготовлену воду, який відрізняється тим, що додатково містить сік кореня селери, водний екстракт плодів глоду, водний екстракт коренів родовика, сорбат калію у наступному співвідношенні компонентів, на 100 дал напою: сік грейпфрута, л 125-145 сік кореня селери, л 20-26 ...
Безалкогольний соковий напій “життєва сила”
Номер патенту: 108000
Опубліковано: 10.03.2015
Автори: Ясінська Ірина Леонідівна, Чижук Олена Євгенівна, Іванова Вікторія Джанівна
Мітки: життєва, безалкогольний, сила, соковий, напій
Формула / Реферат:
Безалкогольний соковий напій, що містить сік грейпфрута, цукор, аскорбінову кислоту, підготовлену воду, який відрізняється тим, що додатково містить сік кореня селери, водний екстракт плодів глоду, водний екстракт коренів родовика, сорбат калію у наступному співвідношенні компонентів, на 100 дал напою: сік грейпфрута, л 125-145 сік кореня селери, л 20-26 водний...
Кристалічна поліморфна (+)-(s)-форма гідросульфату клопідогрелю (форма 2) (варіанти), спосіб її отримання (варіанти) та фармацевтична композиція
Номер патенту: 70323
Опубліковано: 15.10.2004
Автори: Сен-Жермен Жан, Кастро Бертран, Буске Андре
МПК: A61K 31/4365, C07D 495/04, A61P 7/02
Мітки: гідросульфату, композиція, +)-(s)-форма, спосіб, отримання, форма, кристалічна, фармацевтична, варіанти, клопідогрелю, поліморфна
Формула / Реферат:
1. Кристалічна поліморфна (+)-(S)-форма гідросульфату клопідогрелю (Форма 2), порошок якої має рентгенівську дифрактограму з характеристичними піками, що відповідають міжплощинним відстаням приблизно 4,11, 6,86, 3,60, 5,01, 3,74, 6,49, 5,66 .2. Кристалічна поліморфна (+)-(S)-форма гідросульфату клопідогрелю (Форма 2), яка має інфрачервоний спектр з характеристичними...
Дозована лікарська форма інгібітора фосфодіестерази та спосіб лікування сексуальної дисфункції
Номер патенту: 72248
Опубліковано: 15.02.2005
Автори: Уітейкер Джон Стівен, Пуллман Уільям Ернест
МПК: A61P 15/10, A61K 31/4985
Мітки: сексуальної, дозована, форма, дисфункції, спосіб, лікування, інгібітора, лікарська, фосфодіестерази
Формула / Реферат:
1. Фармацевтична дозована лікарська форма, яка містить від 1 до приблизно 20 мг сполуки, що має структурну формулу:,де згадана дозована лікарська форма придатна для орального призначення.2. Дозована форма за п. 1, яка містить від 2 до приблизно 20 мг сполуки в одиничній дозованій формі.3. Дозована форма за п. 1, яка містить від 5 до приблизно 20 мг сполуки в одиничній дозованій формі.4. Дозована форма за п....
Автономна система електроживлення
Номер патенту: 73097
Опубліковано: 10.09.2012
Автори: Шинкаренко Василь Федорович, Чумак Вадим Володимирович, Гайдаєнко Юрій Васильович, Мошняга Тарас Артурович, Маляренко Станіслав Олександрович
МПК: H02K 35/00
Мітки: автономна, електроживлення, система
Формула / Реферат:
1. Автономна система електроживлення, що містить плавучий водонепроникний корпус, всередині якого розміщений дуговий статор електрогенератора з якірною обмоткою, рухомий елемент із системою магнітоелектричного збудження, який за допомогою вузла маятникового підвісу підвішений до корпусу, і підсистему акумулювання та перетворення електричної енергії, яка відрізняється тим, що активні поверхні дугового статора і рухомої частини генератора...
Попередній патент: Оправа для окулярів, масок для професійного або спортивного використання тощо
Наступний патент: Комбінації, що містять атипові антипсихотичні засоби та агоністи taar1
Випадковий патент: Термос-ароматизатор