Пристрій управління двокоординатним механізмом переміщення
Номер патенту: 15103
Опубліковано: 30.06.1997
Автори: Стаднік Петро Омел'янович, Єпіфанов Юрій Михайлович, Лисенко Юрій Миколайович, Суздаль Віктор Семенович
Формула / Реферат
Устройство управления двухкоординатным механизмом перемещения, содержащее вычислительное устройство, контроллер шагового привода, блок оптронных ключей и последовательно соединенные блок усилителей шагового привода, шаговые двигатели и механизм перемещения, отличающееся тем, что контроллер шагового привода посредством разъемного соединения подключен к вычислительному устройству и содержит делитель частоты, программируемый таймер, дешифратор управляющих сигналов, регистр управления и шинный формирователь, при этом делитель частоты контроллера своим входом соединен с выходом разъемного соединения, которое через шины управления и адреса/данных соединено с дешифратором управляющих сигналов, регистром управления и первым входом программируемого таймера, второй вход которого соединен с выходом делителя частоты, третий вход - с первым выходом регистра управления, а выход таймера и второй выход регистра управления соединен с шинным формирователем, выход которого соединен с последовательно включенными логическим блоком, пультом ручного управления, блоком оптронных ключей и блоком усилителей шагового привода.
Текст
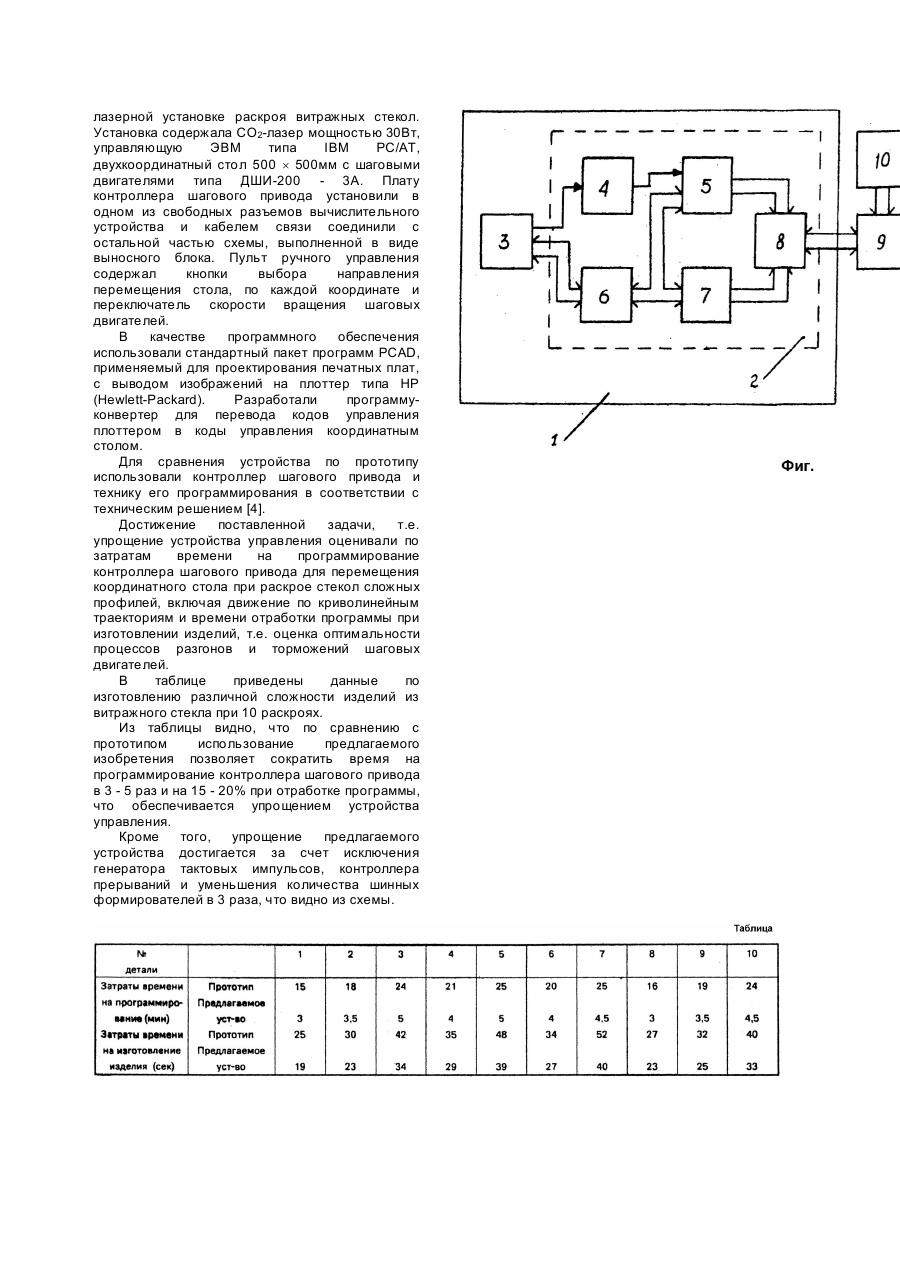
Изобретение относится к устройствам управления техническими средствами с помощью ЭВМ, в частности, к устройствам программного управления двухкоординатными механизмами перемещения на основе шагового привода. Изобретение может найти применение в лазерных установках раскроя листовых материалов, скрайбирования керамических плат, подгонки сопротивления резисторов, изготовлении лекал для швейной промышленности и т.д. Наиболее близким по технической сущности и достигаемому эффекту и выбранным в качестве прототипа является устройство управления двухкоординатным механизмом перемещения. Содержащее вычислительное устройство, подключенный к нему через магистральный параллельный интерфейс контроллер шагового привода, содержащий шинный формирователь, дешифратор управляющих сигналов, регистр управления, контроллер прерываний, программируемый таймере генератором тактовых импульсов, логический блок с пультом ручного управления, оптронные ключи. Контроллер шагового привода через усилители шагового привода и шаговые двигатели соединен с механизмом перемещения. Недостатком известного устройства является аппаратное выполнение регистра управления, предназначенного для запуска каналов программируемого таймера и хранения информации о режиме коммутации обмоток и направлений вращения шаговых двигателей по каждой координате. Это приводит к усложнению программирования режимов работы основных узлов контроллера шагового привода. Кроме того, контроллер шагового привода выполнен в виде выносного блока и по шинам адресной, данных и управления вычислительного устройства необходимо устанавливать шинные формирователи, что увеличивает их количество и усложняет схему устройства. Необходимость использования в контроллере шагового привода генератора тактовых импульсов также усложняет схему устройства управления. В основу изобретения поставлена задача разработать устройство управления двухкоординатным механизмом перемещения, которое обеспечивало бы упрощение схемы управления за счет уменьшения количества элементов контроллера, что в свою очередь, приводит к упрощению программного обеспечения, удешевлению устройства и повышению его надежности. Решение задачи достигается тем, что в устройстве управления двухкоординатным механизмом перемещения, содержащем вычислительное устройство, контроллер шагового привода, блок оптронных ключей и последовательно соединенные блок усилителей шагового привода, шаговые двигатели и механизм перемещения, согласно изобретению, контроллер шагового привода посредством разъемного соединения подключен к вычислительному устройству и содержит делитель частоты, программируемый таймер, дешифратор управляющих сигналов, регистр управления и шинный формирователь, при этом делитель частоты контроллера своим входом соединен с выходом разъемного соединения, которое через шины управления и адреса/данных соединено с дешифратором управляющих сигналов, регистром управления и первым входом программируемого таймера, второй вход которого соединен с выходом делителя частоты, третий вход - с первым выходом регистра управления, а выход таймера и второй выход регистра управления соединены с шинным формирователем, выход которого соединен с последовательно включенными логическим блоком, пультом ручного управления, блоком оптронных ключей и блоком усилителей шагового привода. Выполнение контроллера шагового привода указанным выше образом позволяет упростить устройство управления за счет установки его непосредственно в вычислительном устройстве. Установка контроллера Осуществляется в одном из дополнительных разъемов вычислительного устройства, что обеспечивает соединение этих элементов устройства управления без шинных формирователей. При этом число формирователей сокращается на 3 по шинам управления, на 10 по адресным шинам и на 8 по шинам данных. В отличие от прототипа в заявляемом устройстве выходной сигнал генератора тактовых импульсов выведен на разъемное соединение вычислительного устройства, что позволяет упростить схему контроллера шагового привода и повысить помехоустойчивость предложенного устройства управления в целом. Регистр управления в предлагаемом устройстве позволяет упростить управление программируемым таймером, включая организацию его работы по прерываниям, исключив при этом отдельный блок контроллера прерываний. Кроме того, упрощается программирование самого регистра управления, ввиду отсутствия необходимости хранения информации о режиме коммутации обмоток и направления вращения шаговых двигателей по каждой координате. Реализация данных алгоритмов управления осуществлена в предлагаемом устройстве при помощи логического блока, выполненного на перепрограммируемом запоминающем устройстве. Установка шинных формирователей на выходе контроллера и их соединение с остальными элементами устройства управления позволила сократить число формирователей до 8. При этом логический блок по кабелю связи обеспечивает прием следующих сигналов программируемого таймера и регистра управления: - двух последовательностей импульсов для организации величины и скорости перемещения; - сигналы для выбора направления вращения двигателей по координатам; - сигнал переключения режимов "ручной" "автоматический". Следовательно, выполнение контроллера шагового привода указанным в заявляемом объекте образом обеспечивает достижение поставленной задачи - упрощает устройство управления двухкоординатным механизмом перемещения. На чертеже (фиг.) представлено заявляемое устройство управления двухкоординатным механизмом перемещения. Устройство содержит вычислительное устройство 1, контроллер 2 шагового привода, разъемное соединение 3 вычислительного устройства 1. Контроллер 2 содержит делитель 4 частоты тактового генератора вычислительного устройства 1, программируемый таймер 5, дешифратор 6 управляющих сигналов, регистр 7 управления, шинный формирователь 8. Заявляемое устройство содержит также логический блок 9 с пультом 10 ручного управления шаговым приводом, блок 11 оптронных ключей, блок 12 усилителей шагового привода, шаговые двигатели 13, 14, механизм 15 перемещения. Контроллер 2 шагового привода выполнен в виде отдельной платы, установленной в вычислительном устройстве 1 через разъемное соединение 3. Шины управления и адреса/данных на разъемном соединении 3 вычислительного устройства 1 соединены через дешифратор 6 управляющих сигналов с регистром 7 управления и первым входом программируемого таймера 5. На второй вход программируемого таймера 5 через делитель 4 частоты с разъемного соединения 3 подана тактовая частота генератора вычислительного устройства 1. Для запуска каналов программируемого таймера 5 и организации работы по прерыванию его третий вход соединен с первым выходом регистра 7 управления. Выход программируемого таймера 5 и второй выход регистра 7 управления через шинный формирователь 8 соединены с логическим блоком 9. Шинный формирователь 8 содержит 8 каналов для соединения контроллера 2 шагового привода с логическим блоком 9. Выход пульта 10 ручного управления соединен со вторым входом логического блока 9. Выход логического блока 9 через блок 11 оптронных ключей, блок 12 усилителей шагового привода подключен к шаговым двигателям 13,14, соединенных с механизмом 15 перемещения. Количество оптронных ключей блока 11 и усилителей шагового привода блока 12 определяется количеством обмоток шаговых двигателей. В заявляемом устройстве их по 4 на каждый двигатель. Следовательно, количество используемых оптронных ключей - 8, и усилителей шагового привода - 8. Логический блок 9 выполнен на перепрограммируемом запоминающем устройстве (К573РФ5). Регистр 7 управления и программируемый таймер 5 выполнены на микросхемах К 580ВВ55 и К 580ВИ53 соответственно. Шинный формирователь 8 выполнен на микросхемах К555АП6 и соединен с логическим блоком 9 через кабель связи. Устройство работает следующим образом. Вычислительное устройство 1 через дешифратор б управляющих сигналов осуществляет формирование сигналов управления узлами контроллера 2 шагового привода с использованием информации, поступающей с разъемного соединения 3 по шинам управления и адреса данных. Для программируемого таймера 5 через регистр 7 управления программируется режим, очередность загрузки, тип счета. При этом два канала программируемого таймера 5 устанавливаются в режим делителей частоты, а третий используется как формирователь импульсов разрешения работы первых двух каналов. После программирования в каналы делителей частоты таймера 5 записываются коды задающие время их работы, что соответствует заданию времени перемещения механизма 15 по каждой координате. При этом соотношение частот на выходе делителей соответствует тангенсу угла наклона вектора перемещения. Через регистр 7 управления, шинный формирователь 8, логический блок 9 программируется также режим управления механизмом 15 перемещения ("ручной" либо "автоматический"). Перемещение осуществляется шаговыми двигателями 13, 14, частота управления на которые поступает через блок 11 оптронных ключей гальванической развязки и блок 12 усилителей шагового привода. Пуск шаговых двигателей 13, 14 в автоматическом режиме осуществляется с помощью записи в регистр 7 управления кода, разрешающего работу программируемого таймера 5 и логического блока 9. При этом механизм 15 перемещения начинает движение в направлении и с режимом коммутации обмоток шаговых двигателей 13, 14, запрограммированных в виде закодированных инструкций в логическом блоке 9. Каналы программируемого таймера 5, выполняющие роль делителей частоты, ведут подсчет временных интервалов, за которые выдаются импульсы управления. Канал таймера 5 формирователя импульсов меток времени обеспечивает работу по прерыванием. В процессе работы программируемого таймера 5 можно менять коэффициенты деления частоты в каналах по любому закону, обеспечивая тем самым плавный разгон и торможение шаговых двигателей 13, 14 по линейному, экспоненциальному либо любому другому закону. В момент обнуления канала таймера 5, задающего время перемещения, в регистр 7 управления поступает сигнал, свидетельствующий о завершении перемещения по данной координате. В зависимости от результатов анализа сигнала окончания загружается новый код, соответствующий следующей величине перемещения. Вычислительное устройство 1 позволяет задавать новое значение перемещения без остановки шаговых двигателей 13, 14, обеспечивая таким образом плавное криволинейное движение. Пуск шаговых двигателей 13, 14 в ручном режиме осуществляется путем перевода устройства управления в положение "ручной". При этом на второй вход логического блока 9 поступает непрерывная последовательность тактовых импульсов, обеспечивая работу механизма 15 перемещения от пульта 10 ручного управления. Пульт 10 ручного управления позволяет изменять направление перемещения по каждой координате со скоростями, изменяемыми дискретно (плавного изменения частоты управляющих импульсов в данном случае не требуется), и режимом коммутации обмоток шаговых двигателей 13, 14, закодированным в логическом блоке 9. Пример конкретного выполнения. Предлагаемое устройство использовали в лазерной установке раскроя витражных стекол. Установка содержала CO2-лазер мощностью 30Вт, управляющую ЭВМ типа IBM PC/AT, двухкоординатный стол 500 ´ 500мм с шаговыми двигателями типа ДШИ-200 - 3А. Плату контроллера шагового привода установили в одном из свободных разъемов вычислительного устройства и кабелем связи соединили с остальной частью схемы, выполненной в виде выносного блока. Пульт ручного управления содержал кнопки выбора направления перемещения стола, по каждой координате и переключатель скорости вращения шаговых двигателей. В качестве программного обеспечения использовали стандартный пакет программ PCAD, применяемый для проектирования печатных плат, с выводом изображений на плоттер типа HP (Hewlett-Packard). Разработали программуконвертер для перевода кодов управления плоттером в коды управления координатным столом. Для сравнения устройства по прототипу использовали контроллер шагового привода и технику его программирования в соответствии с техническим решением [4]. Достижение поставленной задачи, т.е. упрощение устройства управления оценивали по затратам времени на программирование контроллера шагового привода для перемещения координатного стола при раскрое стекол сложных профилей, включая движение по криволинейным траекториям и времени отработки программы при изготовлении изделий, т.е. оценка оптимальности процессов разгонов и торможений шаговых двигателей. В таблице приведены данные по изготовлению различной сложности изделий из витражного стекла при 10 раскроях. Из таблицы видно, что по сравнению с прототипом использование предлагаемого изобретения позволяет сократить время на программирование контроллера шагового привода в 3 - 5 раз и на 15 - 20% при отработке программы, что обеспечивается упрощением устройства управления. Кроме того, упрощение предлагаемого устройства достигается за счет исключения генератора тактовых импульсов, контроллера прерываний и уменьшения количества шинных формирователей в 3 раза, что видно из схемы.
ДивитисяДодаткова інформація
Назва патенту англійськоюAppliance for control of two-coordinate displacement mechanism
Автори англійськоюStadnyk Petro Omelianovych, Suzdal Viktor Semenovych, Lysenko Yurii Mykolaiovych, Yepifanov Yurii Mykhailovych
Назва патенту російськоюУстройство управления двухкоординатным механизмом перемещения
Автори російськоюСтадник Петр Емельянович, Суздаль Виктор Семенович, Лысенко Юрий Николаевич, Епифанов Юрий Михайлович
МПК / Мітки
МПК: G05D 27/02
Мітки: управління, механізмом, двокоординатним, пристрій, переміщення
Код посилання
<a href="https://ua.patents.su/3-15103-pristrijj-upravlinnya-dvokoordinatnim-mekhanizmom-peremishhennya.html" target="_blank" rel="follow" title="База патентів України">Пристрій управління двокоординатним механізмом переміщення</a>
Пристрій для управління механізмом різання аркушерізальної машини
Номер патенту: 12226
Опубліковано: 25.12.1996
Автори: Луцків Микола Михайлович, Верхола Михайло Іванович
МПК: G05B 19/18
Мітки: управління, пристрій, аркушерізальної, різання, машини, механізмом
Формула / Реферат:
Устройство для управления механизмом резания листорезалыюй машины, содержащее цифрокодовый блок задания перемещения механизма резания, выход которого соединен с первым входом сумматора-вычитателя, реверсивный счетчик импульсов, преобразователь код-напряжение, выходом подключенный к входу усилителя, двигатель, вал которого механически связан с импульсным датчиком частоты вращения, отличающееся тем, что, с целью расширения области...
Пристрій для переміщення зварювальної головки
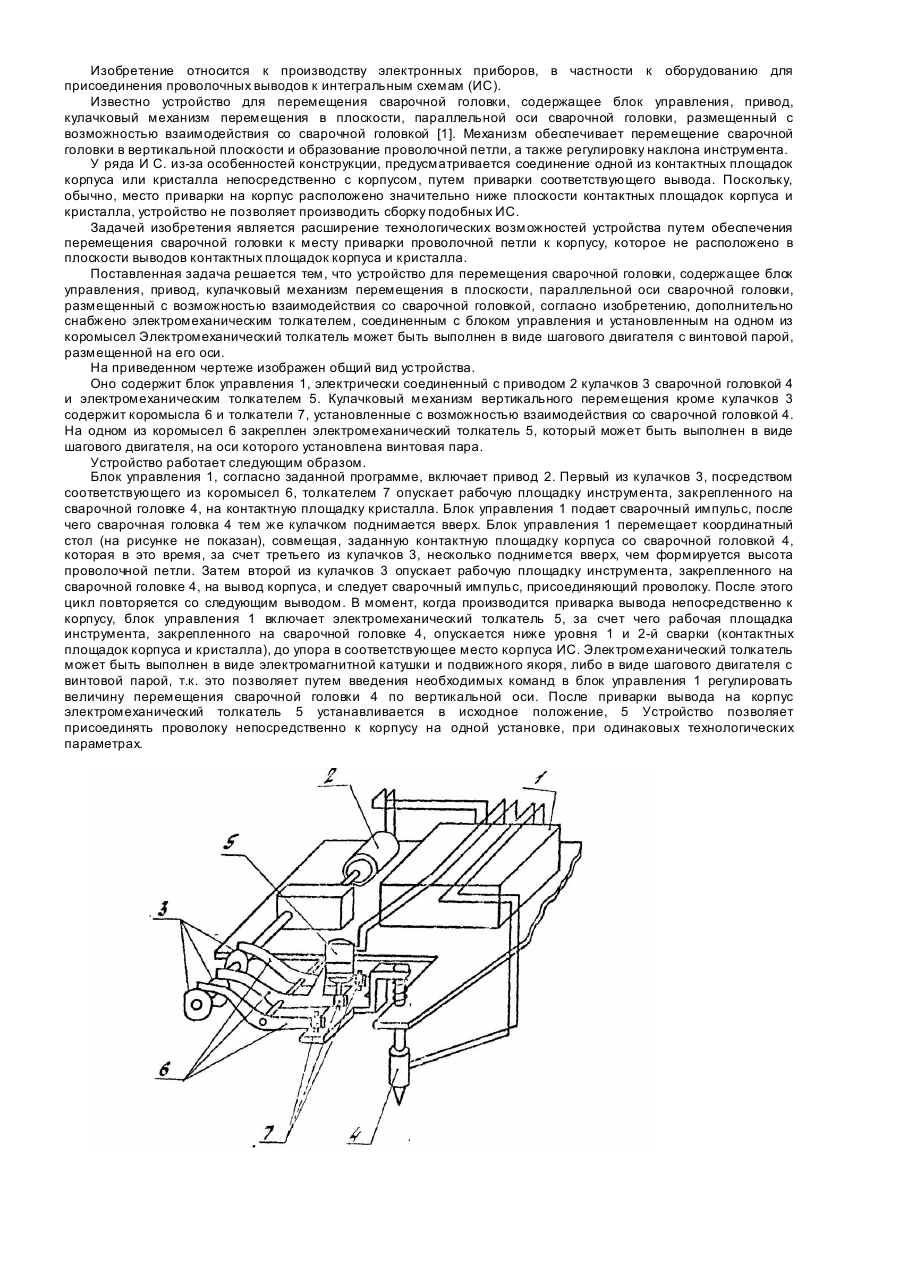
Номер патенту: 2640
Опубліковано: 26.12.1994
Автори: Молчанов Костянтин Вікторович, Куляк Михайло Васильович, Хомін Ігор Богданович
МПК: H01L 21/60
Мітки: пристрій, головки, зварювальної, переміщення
Формула / Реферат:
1. Устройство для перемещения сварочной головки, содержащее блок управления, привод, кулачковый механизм перемещения в плоскости, параллельной оси сварочной головки, размещенный с возможностью взаимодействия со сварочной головкой, отличающееся тем, что кулачковый механизм перемещения снабжен электромеханическим толкателем, соединенным с блоком управления и установленным на одном из коромысел.2. Устройство по п.1, отличающееся тем, что...
Пристрій управління механізмом розмотки рулонів довгомірного матеріалу
Номер патенту: 12990
Опубліковано: 28.02.1997
Автори: Охмакевич Василь Федорович, Костенко Людмила Степанівна, Матяш Володимир Георгійович, Воронецький Ігор Якович, Пастернак Ігор Самойлович
МПК: B65H 19/10
Мітки: рулонів, матеріалу, механізмом, управління, довгомірного, розмотки, пристрій
Формула / Реферат:
(57) Устройство управления механізмом размотки рулонов длинномерного материала, содержащее блоки управления приводами рулонов и приводом карусельного узла их поворота, блок определения места склейки и блок управления резкой материала, выход которого связан с исполнительным механизмом резки, установленным на поворотной раме с приводом, имеющим блок управления, блок управления поворотом карусельного узла, датчик положения рулонов, задатчик...
Пристрій управління електромагнітним приводом для дистанційного управління автоматичним вимикачем
Номер патенту: 17758
Опубліковано: 20.05.1997
Автори: Костюк Володимир Андрійович, Дашков Андрій Георгійович, Гущін Владислав Якович
МПК: H01H 47/00, H01F 7/06
Мітки: приводом, вимикачем, управління, пристрій, електромагнітним, автоматичним, дистанційного
Формула / Реферат:
Устройство управления электромагнитным приводом для дистанционного управления автоматическим выключателем, содержащее аппарат включения с замыкающим и размыкающим контактами, аппарат отключения с замыкающим контактом, два конечных выключателя, выводы для подключения размыкающего блок-контакта автоматического выключателя, выводы для подключения катушек электромагнитов привода, выводы для подключения источника питания, выводы для подключения...
Пристрій автоматичного управління гідродинамічним режимом в апаратах з шнековими транспортуючими органами
Номер патенту: 9099
Опубліковано: 30.09.1996
Автори: Ладанюк Анатолій Петрович, Коновалов Костянтин Володимирович, Негода Федір Валентинович, Ельперін Ігор Володимирович
МПК: C13D 3/00
Мітки: органами, гідродинамічним, пристрій, транспортуючими, шнековими, управління, автоматичного, апаратах, режимом
Формула / Реферат:
Устройство автоматического управлення гидродинамическим режимом в аппаратах со шнековыми транспортирующими органами, содержащее первичный преобразователь уровня, блок задания, соединенный с компаратором, исполнительный механизм подачи поверхностно-активных веществ, отличающееся тем, что, с целью увеличения сахара за счет прогнозирования и ликвидации возникаемой пробки, оно содержит дополнительный преобразователь уровня и три...
Попередній патент: Спосіб лікування облітеруючих уражень судин кінцівок та пристрій для його здійснення
Наступний патент: Стабілізатор постійної напруги
Випадковий патент: Пристрій для промивки фільтрів на вибої свердловин псг