Маніпулятор ручний

Формула / Реферат
1. Маніпулятор ручний, що містить несучий елемент, виконаний у вигляді штанги, різальний ніж, розміщений на його кінці і жорстко прикріплений до нього, протирізальний ніж, що шарнірно з'єднаний з тягою, важіль управління, зв'язаний з тягою, який відрізняється тим, що робоча поверхня різального ножа виконана клиноподібної форми, а робоча поверхня протирізального ножа має прямокутну форму, при цьому робочі поверхні ножів зміщені одна відносно одної у вертикальній площині, пристрій також оснащений тягами "натиск" і "відтискування", виконаними у вигляді тросових приводів, при цьому один кінець кожної тяги закріплений на протирізальному ножі, а другий - на важелі управління, а важіль управління шарнірно прикріплений до верхнього кінця несучого елементу.
2. Маніпулятор за п. 1, який відрізняється тим, що передні краї робочих поверхонь різального та протирізального ножів виконані відігнутими догори.
3. Маніпулятор за п. 1, який відрізняється тим, що важіль управління виконаний з рукояткою, що має форму, зручну для управління рукою.
Текст
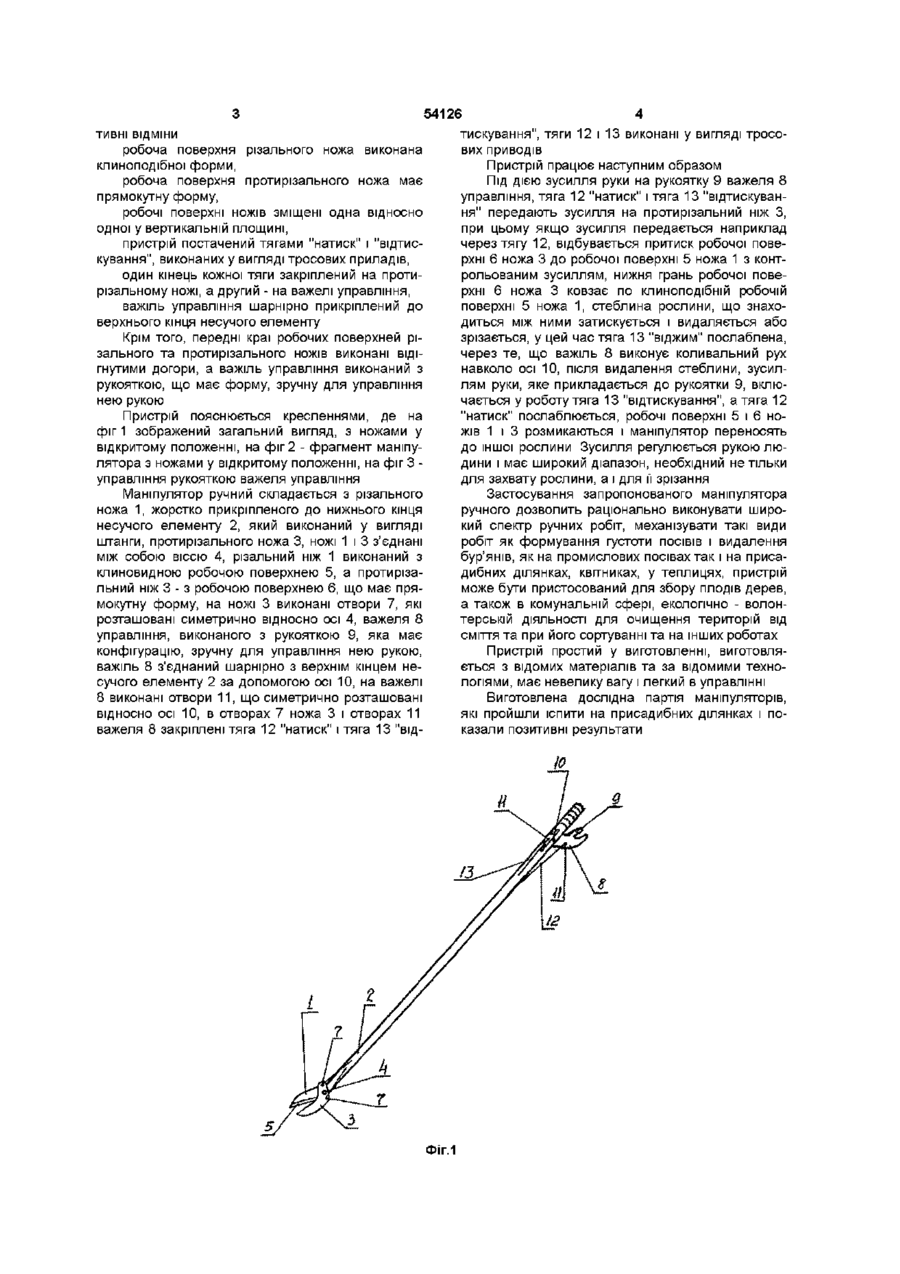
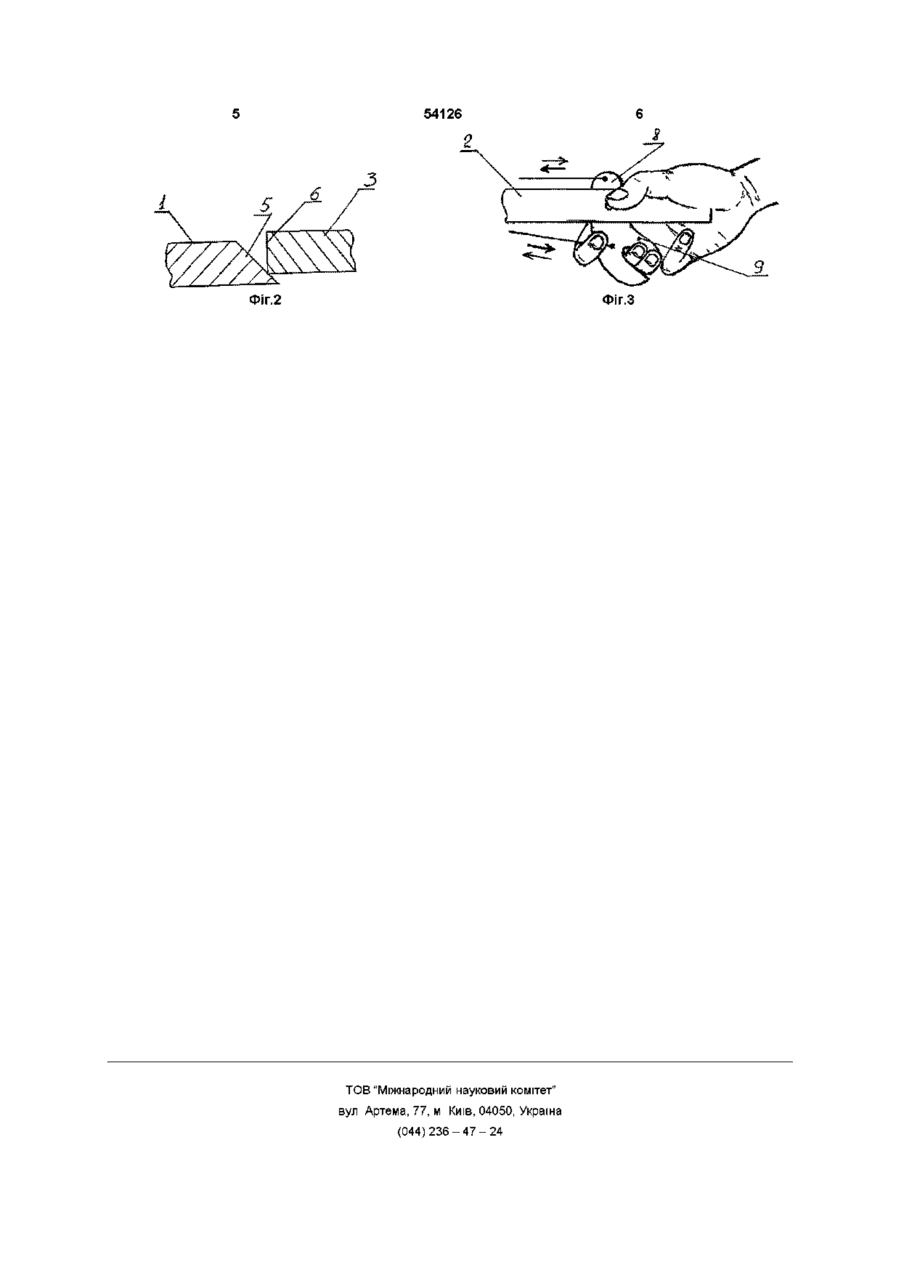
1 Маніпулятор ручний, що містить несучий елемент, виконаний у вигляді штанги, різальний ніж, розміщений на його КІНЦІ І жорстко прикріплений до нього, протирізальний ніж, що шарнірно з'єднаний з тягою, важіль управління, зв'язаний з тягою, який відрізняється тим, що робоча поверхня різального ножа виконана клиноподібної форми, а робоча поверхня протирізального ножа має прямокутну форму, при цьому робочі поверхні но жів зміщені одна відносно одної у вертикальній площині, пристрій також оснащений тягами "натиск" і "відтискування", виконаними у вигляді тросових приводів, при цьому один кінець кожної тяги закріплений на протирізальному ножі, а другий - на важелі управління, а важіль управління шарнірно прикріплений до верхнього кінця несучого елементу 2 Маніпулятор за п 1, який відрізняється тим, що передні краї робочих поверхонь різального та протирізального ножів виконані відігнутими догори 3 Маніпулятор за п 1, який відрізняється тим, що важіль управління виконаний з рукояткою, що має форму, зручну для управління рукою Запропонований винахід відноситься до сільськогосподарських приладів спеціального призначення, призначений для механізації робіт та полегшення праці при догляді за культурними рослинами, формуванні густоти їх ПОСІВІВ, видаленні бур'янів і може бути використаний у комунальній сфері і інших галузях Відомий секатор, що містить підпружинені рукоятки, шарнірно з'єднані між собою різальний та протирізальний ножі, з робочою та неробочою площинами, причому різальний ніж має заточки різального ребра збоку неробочої площини, а збоку робочої площини різального ножа, за довжиною різального ребра, виконана фаска [патент РФ №2050111, кл A01G3/02, опублік 20 12 95] Недоліками відомого секатору є низькі експлуатаційні показники, звужені функціональні можливості Найбільш близькими до пристрою, що заявляється, є ножиці для обрізування стелючих рослин, які включають порожнистий несучий елемент, різальний ніж, розміщений на його нижньому КІНЦІ та, жорстко прикріплений до нього, протирізальний ніж, що шарнірно з'єднаний з тягою, рукоятку з важелем управління, при цьому різальний ніж виконаний з нижньою поверхнею, яка перпендикулярна до площини, що проходить через вертикальну вісь несучого елемента, а край різального ножа виконаний із скосом, який повернений назовні, робоче лезо протирізального ножа виконано з вну трішнім радіусом Несучий елемент ножиць виконаний у вигляді штанги, а тяга розміщена усередині неї [Авторське свідоцтво СРСР №1761044, кл A01G 3/02, опублік 15 09 92] До недоліків відомих ножиць відносяться складність конструкції, висока вартість, велика затрата зусиль, невисока ефективність, вузькі функціональні можливості В основу винаходу поставлене завдання удосконалення маніпулятора ручного, в якому виконання робочої поверхні різального ножа клиновидної форми, а протирізального ножа - прямокутної форми, із зміщенням робочих поверхней ножів одна відносно одної, встановлення тяг "натиск" та "відтискування", закріплення одного кінця кожної тяги на протирізальному ножі, а другого - на важелі управління забезпечують механізоване захоплення або зрізання рослин, цим забезпечується полегшення формування густоти посіву просапних культур і видалення бур'янів, тобто розширення функціональних можливостей, простота конструкції, и здешевлення, невеликі затрати зусиль, збільшення ефективності Поставлене завдання вирішується тим, що у маніпуляторі ручному, який включає несучий елемент, виконаний у вигляді штанги, різальний ніж, розміщений на його КІНЦІ І, жорстко прикріплений до нього, протирізальний ніж, що шарнірно з'єднаний з тягою, важіль управління, зв'язаний з тягою, згідно з винаходом передбачені наступні конструк (О 5 ю 54126 тискування", тяги 12 і 13 виконані у вигляді тросових приводів робоча поверхня різального ножа виконана клиноподібної форми, Пристрій працює наступним образом робоча поверхня протирізального ножа має Під ДІЄЮ зусилля руки на рукоятку 9 важеля 8 прямокутну форму, управління, тяга 12 "натиск" і тяга 13 "відтискування" передають зусилля на протирізальний ніж З, робочі поверхні ножів зміщені одна відносно при цьому якщо зусилля передається наприклад одної у вертикальній площині, через тягу 12, відбувається притиск робочої повепристрій постачений тягами "натиск" і "відтисрхні 6 ножа 3 до робочої поверхні 5 ножа 1 з конткування", виконаних у вигляді тросових приладів, рольованим зусиллям, нижня грань робочої повеодин кінець кожної тяги закріплений на протирхні 6 ножа 3 ковзає по клиноподібній робочій різальному ножі, а другий - на важелі управління, поверхні 5 ножа 1, стеблина рослини, що знаховажіль управління шарнірно прикріплений до диться між ними затискується і видаляється або верхнього кінця несучого елементу зрізається, у цей час тяга 13 "віджим" послаблена, Крім того, передні краї робочих поверхней річерез те, що важіль 8 виконує коливальний рух зального та протирізального ножів виконані відінавколо осі 10, після видалення стеблини, зусилгнутими догори, а важіль управління виконаний з лям руки, яке прикладається до рукоятки 9, вклюрукояткою, що має форму, зручну для управління чається у роботу тяга 13 "відтискування", а тяга 12 нею рукою "натиск" послаблюється, робочі поверхні 5 і 6 ноПристрій пояснюється кресленнями, де на жів 1 і 3 розмикаються і маніпулятор переносять фіг 1 зображений загальний вигляд, з ножами у до іншої рослини Зусилля регулюється рукою лювідкритому положенні, на фіг 2 - фрагмент маніпудини і має широкий діапазон, необхідний не тільки лятора з ножами у відкритому положенні, на фіг 3 для захвату рослини, а і для її зрізання управління рукояткою важеля управління Маніпулятор ручний складається з різального Застосування запропонованого маніпулятора ножа 1, жорстко прикріпленого до нижнього кінця ручного дозволить раціонально виконувати широнесучого елементу 2, який виконаний у вигляді кий спектр ручних робіт, механізувати такі види штанги, протирізального ножа 3, ножі 1 і 3 з'єднані робіт як формування густоти ПОСІВІВ І видалення між собою віссю 4, різальний ніж 1 виконаний з бур'янів, як на промислових посівах так і на присаклиновидною робочою поверхнею 5, а протирізадибних ділянках, квітниках, у теплицях, пристрій льний ніж 3 - з робочою поверхнею 6, що має пряможе бути пристосований для збору плодів дерев, мокутну форму, на ножі 3 виконані отвори 7, які а також в комунальній сфері, екологічно - волонрозташовані симетрично відносно осі 4, важеля 8 терській ДІЯЛЬНОСТІ для очищення територій від управління, виконаного з рукояткою 9, яка має сміття та при його сортуванні та на інших роботах конфігурацію, зручну для управління нею рукою, Пристрій простий у виготовленні, виготовляважіль 8 з'єднаний шарнірно з верхнім кінцем неється з відомих матеріалів та за відомими техносучого елементу 2 за допомогою осі 10, на важелі логіями, має невелику вагу і легкий в управлінні 8 виконані отвори 11, що симетрично розташовані Виготовлена дослідна партія маніпуляторів, відносно осі 10, в отворах 7 ножа 3 і отворах 11 які пройшли іспити на присадибних ділянках і поважеля 8 закріплені тяга 12 "натиск" і тяга 13 "відказали позитивні результати ТИВНІ ВІДМІНИ Фіг.1 54126 Фіг.2 Фіг.З ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюHand manipulator
Автори англійськоюCherkaschenko Hryhorii Mykolaiovych
Назва патенту російськоюМанипулятор ручной
Автори російськоюЧеркащенко Григорий Николаевич
МПК / Мітки
МПК: A01G 3/00
Мітки: маніпулятор, ручний
Код посилання
<a href="https://ua.patents.su/3-54126-manipulyator-ruchnijj.html" target="_blank" rel="follow" title="База патентів України">Маніпулятор ручний</a>
Маніпулятор

Номер патенту: 50260
Опубліковано: 15.10.2002
Автори: Москаленко Олександр Володимирович, Вігдергауз Леонід Павлович
МПК: E21B 1/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, що складається із стріли, шарнірно приєднаної до нерухомої напрямної телескопічного подавача бурильної машини, спареного гідроциліндра переміщення подавача нагору і вниз, гідроциліндра переміщення стріли маніпулятора у вертикальній площині, гідроциліндра повороту стріли маніпулятора за допомогою рейкової зубчатої передачі і кронштейна, до якого приєднана стріла, і гідроциліндра переміщення стріли у вертикальній площині, який...
Підводний маніпулятор

Номер патенту: 706
Опубліковано: 15.02.2001
Автори: Корольов Сергій Михайлович, Пуриш Валентин Захарович, Корольова Галина Валентинівна
МПК: B25J 3/00
Мітки: маніпулятор, підводний
Формула / Реферат:
Підводний .маніпулятор, що містить опорний каркас із шарнірних елементів, покритий оболонкою, який відрізняється тим, що шарнірні елементи обладані слідкуючими гідроприводами з мікропроцесорним управлінням, оболонка виконана у вигляді м'якого гідроскафандра, крім того маніпулятор обладнано навішаною портативною пневмо-гідростанцією, центральним комп'ютером програмного управління та системами гіростабілізації і супервізорного телеуправління по...
Ручний пристрій для обв’язування предметів металевою стрічкою
Номер патенту: 33975
Опубліковано: 15.07.2002
Автори: Кравцов Віктор Пилипович, Двосков Юрій Семенович, Фрідман Петро Юр'євич, Шоломов Віктор Олександрович
МПК: B65B 13/18
Мітки: стрічкою, предметів, пристрій, обв'язування, ручний, металевою
Формула / Реферат:
1. Ручний пристрій для обв'язування предметів металевою стрічкою, який містить корпус з встановленим в ньому повзуном, що несе пуансон і обрізний ніж, основу з розміщеними на ній матрицею і повернутою робочою поверхнею до згаданого ножа опорою, встановленою з можливістю регулювання робочого зазору між різальною кромкою обрізного ножа і робочою поверхнею опори, і механізм натягу стрічки, який відрізняється тим, що на робочій поверхні опори...
Космічний маніпулятор
Номер патенту: 734
Опубліковано: 15.03.2001
Автори: Пуриш Валентин Захарович, Бойченко Тамара Михайлівна
Мітки: космічний, маніпулятор
Формула / Реферат:
Космічний маніпулятор, що складається із опорного каркаса , побудованого із шарнірних слідкуючих приводів з мікропроцесорним керуванням у м'якому гідроскафандрі, навішаної портативної пневмостанції, центрального комп'ютера програмного керування, систем гіростабілізації та супервізорного керування по кабельному каналу, який відрізняється тим, що його опорний каркас побудовано із шарнірних слідкуючих пневмоприводів, система...
Ручний пристрій для обв’язування предметів металевою стрічкою
Номер патенту: 1148
Опубліковано: 15.02.2002
Автори: Двосков Юрій Семенович, Шоломов Віктор Олександрович, Кравцов Віктор Пилипович, Козлов Георгій Олександрович
МПК: B65B 13/18
Мітки: ручний, предметів, металевою, пристрій, стрічкою, обв'язування
Формула / Реферат:
1. Ручний пристрій для обв'язування предметів металевою стрічкою, що містить змонтовані на основі упори для точного вирівнювання стрічки, механізм фіксації з'єднуваних кінців стрічки, що має притискну рукоятку, яка кінематично зв'язана з рухомим упором для точного вирівнювання стрічки, і механізм натягування стрічки, що включає натяжний важіль і корпус, який відрізняється тим, що він має обмежувач переміщення натяжного важеля, який виконаний...
Попередній патент: Спосіб капітального ремонту танка
Наступний патент: Система електропостачання залізниці змінного струму
Випадковий патент: Протез суглоба