Спосіб керування гвинтом-носієм вертольота
Номер патенту: 24474
Опубліковано: 10.07.2007
Автори: Шлапацький Вячеслав Олександрович, Миргород Юрій Іванович, Онищенко Володимир Михайлович
Формула / Реферат
Спосіб керування гвинтом-носієм вертольота, в основу якого покладено застосування автоматів перекосу різних типів для зміни місцевих кутів атаки лопатей гвинта-носія, який відрізняється тим, що в процесі керування вертольотом в повздовжньому та поперечному каналі використовують властивість поведінки гвинта-носія як механічної системи, що знаходиться під дією періодичного навантаження, а саме зі зміною швидкості польоту вертольота за допомогою як конструктивного, так і аеродинамічного демпфірування лопатей, в площині змаху змінюють кут зсуву фази між діючою силою та викликаним переміщенням лопатей.
Текст
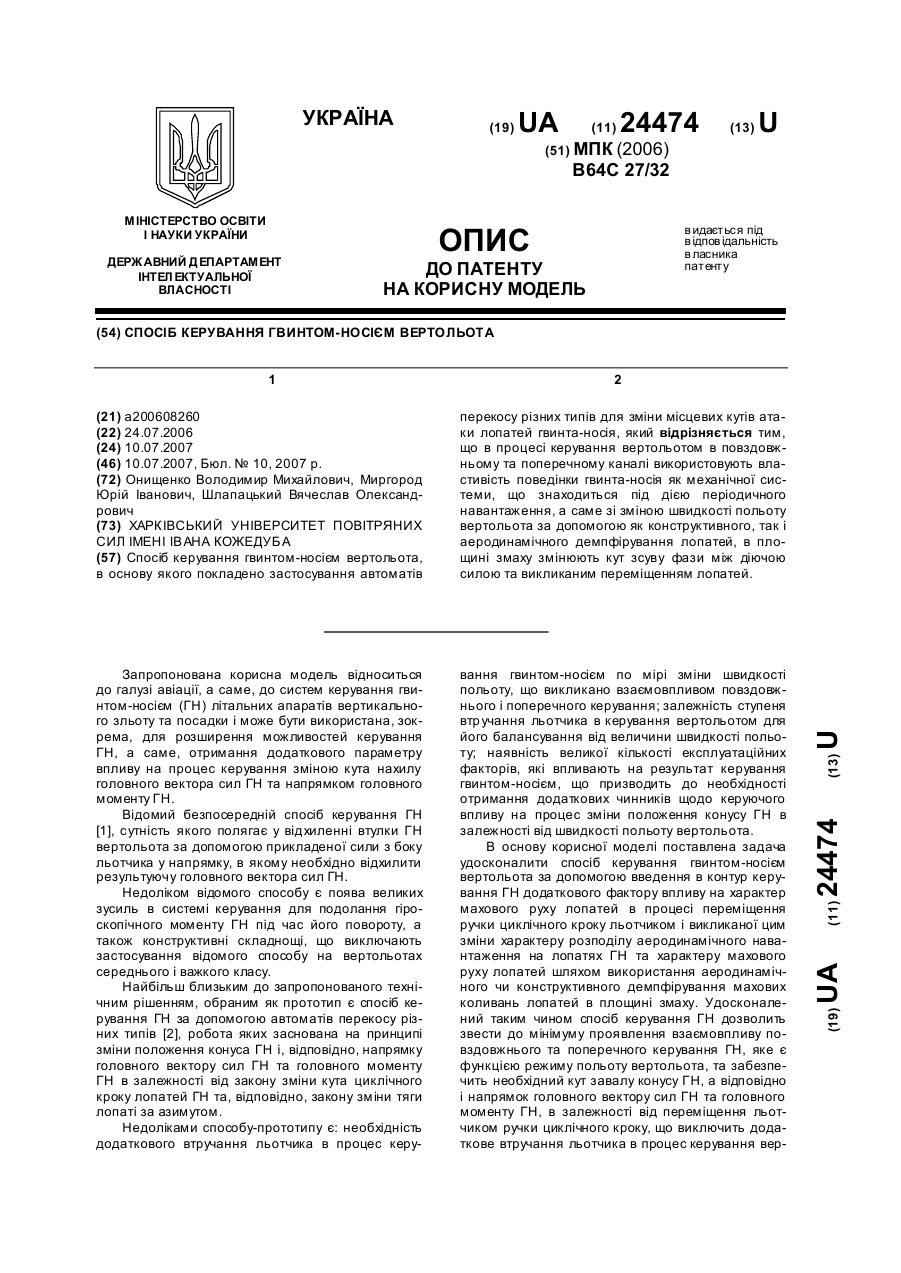
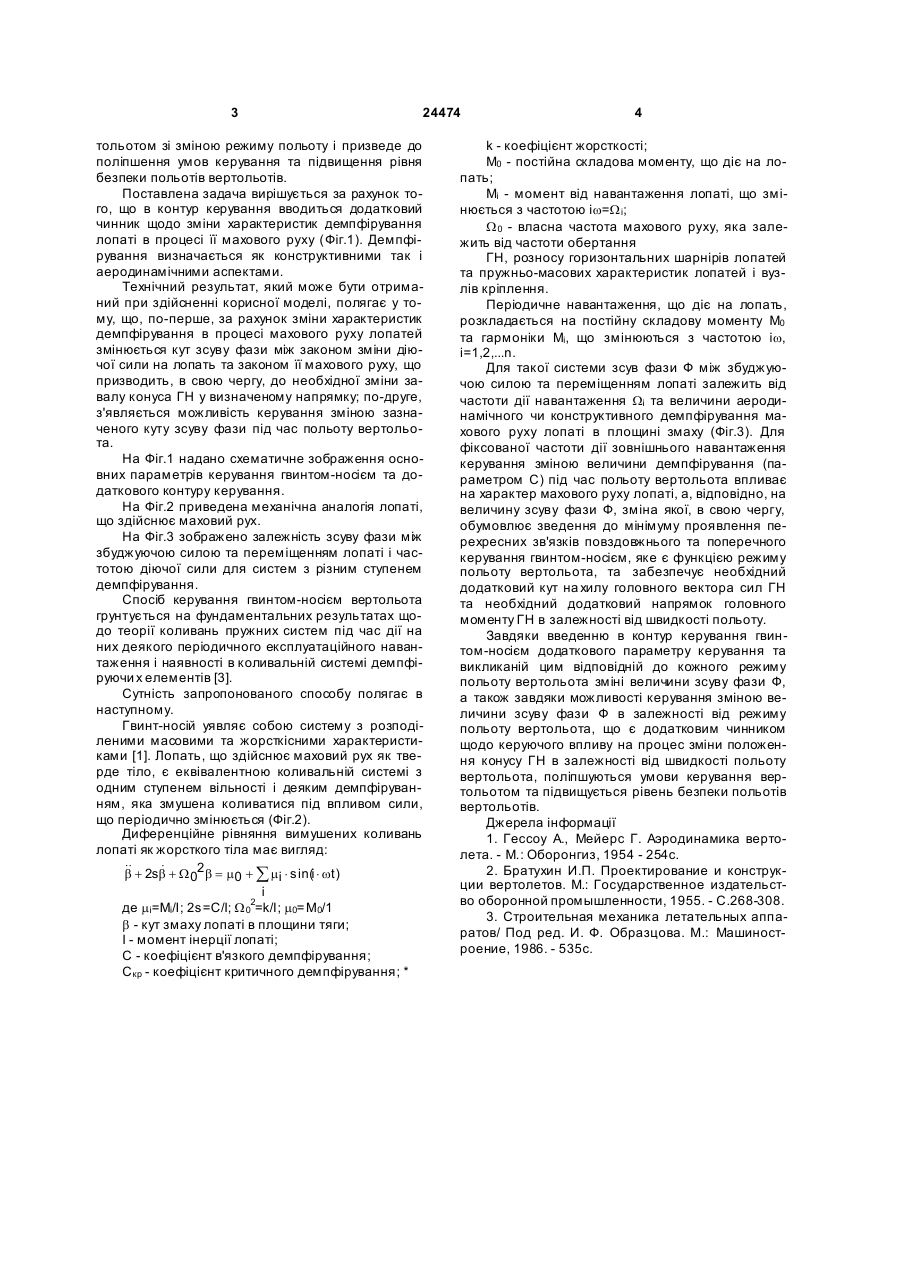
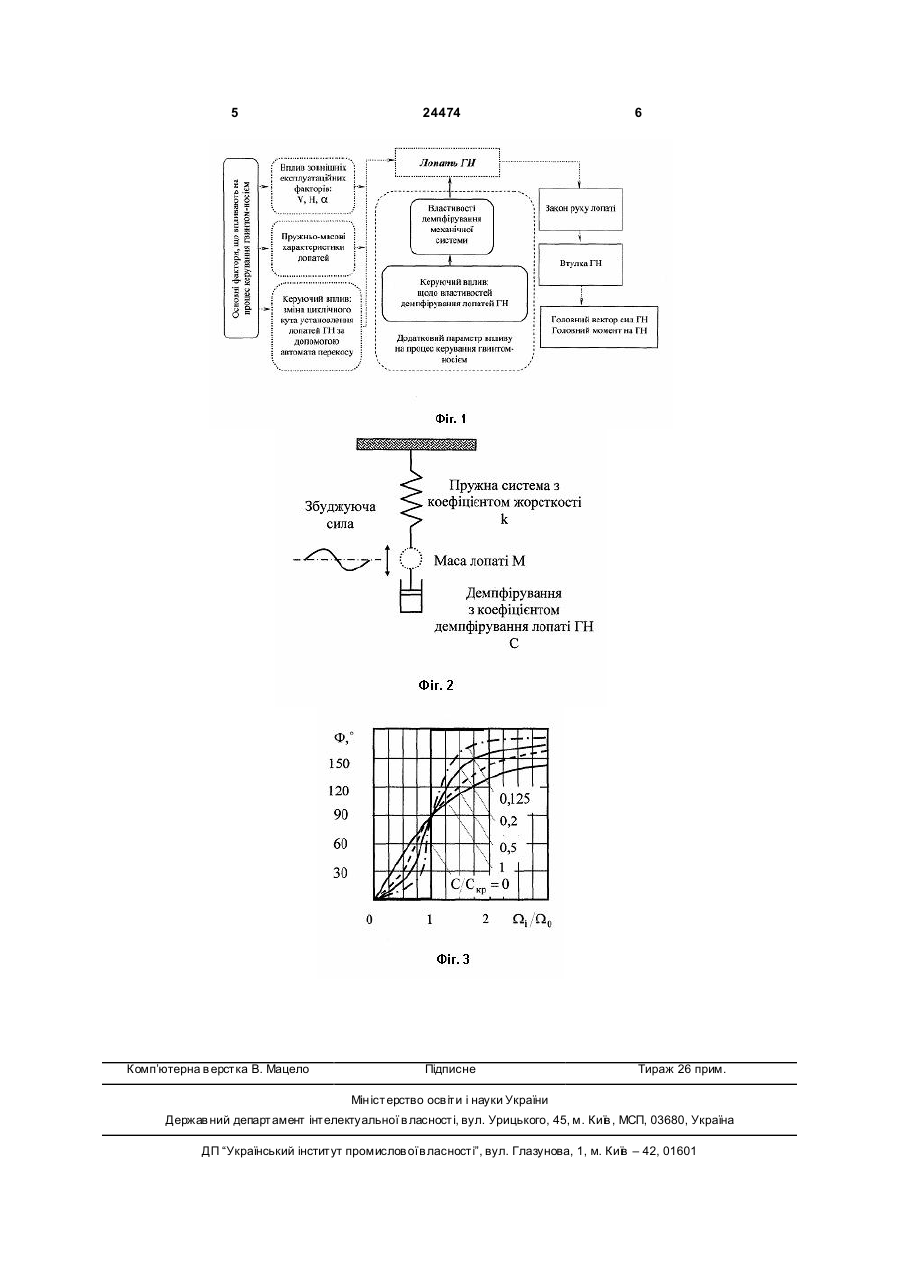
Спосіб керування гвинтом-носієм вертольота, в основу якого покладено застосування автоматів 3 24474 тольотом зі зміною режиму польоту і призведе до поліпшення умов керування та підвищення рівня безпеки польотів вертольотів. Поставлена задача вирішується за рахунок того, що в контур керування вводиться додатковий чинник щодо зміни характеристик демпфірування лопаті в процесі її махового руху (Фіг.1). Демпфірування визначається як конструктивними так і аеродинамічними аспектами. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у тому, що, по-перше, за рахунок зміни характеристик демпфірування в процесі махового руху лопатей змінюється кут зсуву фази між законом зміни діючої сили на лопать та законом її махового руху, що призводить, в свою чергу, до необхідної зміни завалу конуса ГН у визначеному напрямку; по-друге, з'являється можливість керування зміною зазначеного куту зсуву фази під час польоту вертольота. На Фіг.1 надано схематичне зображення основних параметрів керування гвинтом-носієм та додаткового контуру керування. На Фіг.2 приведена механічна аналогія лопаті, що здійснює маховий рух. На Фіг.3 зображено залежність зсуву фази між збуджуючою силою та переміщенням лопаті і частотою діючої сили для систем з різним ступенем демпфірування. Спосіб керування гвинтом-носієм вертольота грунтується на фундаментальних результатах щодо теорії коливань пружних систем під час дії на них деякого періодичного експлуатаційного навантаження і наявності в коливальній системі демпфіруючи х елементів [3]. Сутність запропонованого способу полягає в наступному. Гвинт-носій уявляє собою систему з розподіленими масовими та жорсткісними характеристиками [1]. Лопать, що здійснює маховий рух як тверде тіло, є еквівалентною коливальній системі з одним ступенем вільності і деяким демпфіруванням, яка змушена коливатися під впливом сили, що періодично змінюється (Фіг.2). Диференційне рівняння вимушених коливань лопаті як жорсткого тіла має вигляд: && + 2sb + W 2b = m + å m × sin(i × wt ) & b 0 0 i i де mі=Мі/І; 2s=С/І; W 02=k/I; m0=M0/1 b - кут змаху лопаті в площини тяги; І - момент інерції лопаті; С - коефіцієнт в'язкого демпфірування; Скр - коефіцієнт критичного демпфірування; * 4 k - коефіцієнт жорсткості; M0 - постійна складова моменту, що діє на лопать; Мi - момент від навантаження лопаті, що змінюється з частотою іw=W i; W 0 - власна частота махового руху, яка залежить від частоти обертання ГН, розносу горизонтальних шарнірів лопатей та пружньо-масових характеристик лопатей і вузлів кріплення. Періодичне навантаження, що діє на лопать, розкладається на постійну складову моменту M0 та гармоніки Мi, що змінюються з частотою іw, і=1,2,...n. Для такої системи зсув фази Ф між збуджуючою силою та переміщенням лопаті залежить від частоти дії навантаження Wi та величини аеродинамічного чи конструктивного демпфірування махового руху лопаті в площині змаху (Фіг.3). Для фіксованої частоти дії зовнішнього навантаження керування зміною величини демпфірування (параметром С) під час польоту вертольота впливає на характер махового руху лопаті, а, відповідно, на величину зсуву фази Ф, зміна якої, в свою чергу, обумовлює зведення до мінімуму проявлення перехресних зв'язків повздовжнього та поперечного керування гвинтом-носієм, яке є функцією режиму польоту вертольота, та забезпечує необхідний додатковий кут на хилу головного вектора сил ГН та необхідний додатковий напрямок головного моменту ГН в залежності від швидкості польоту. Завдяки введенню в контур керування гвинтом-носієм додаткового параметру керування та викликаній цим відповідній до кожного режиму польоту вертольота зміні величини зсуву фази Ф, а також завдяки можливості керування зміною величини зсуву фази Ф в залежності від режиму польоту вертольота, що є додатковим чинником щодо керуючого впливу на процес зміни положення конусу ГН в залежності від швидкості польоту вертольота, поліпшуються умови керування вертольотом та підвищується рівень безпеки польотів вертольотів. Джерела інформації 1. Гессоу А., Мейерс Г. Аэродинамика вертолета. - М.: Оборонгиз, 1954 - 254с. 2. Братухин И.П. Проектирование и конструкции вертолетов. М.: Государственное издательство оборонной промышленности, 1955. - С.268-308. 3. Строительная механика летательных аппаратов/ Под ред. И. Ф. Образцова. М.: Машиностроение, 1986. - 535с. 5 Комп’ютерна в ерстка В. Мацело 24474 6 Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of control of carrying screw of helicopter
Назва патенту російськоюСпособ управления винтом-носителем вертолета
МПК / Мітки
МПК: B64C 27/32
Мітки: гвинтом-носієм, спосіб, керування, вертольота
Код посилання
<a href="https://ua.patents.su/3-24474-sposib-keruvannya-gvintom-nosiehm-vertolota.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування гвинтом-носієм вертольота</a>
Лопатева система несучого гвинта вертольота
Номер патенту: 17310
Опубліковано: 15.09.2006
Автори: Чорний Анатолій Петрович, Казакевіч Андрєй Вячеслав, Гончарук Володимир Степанович, Казакевіч Аліна Вячеслав
МПК: B64C 27/32
Мітки: несучого, система, лопатева, гвинта, вертольота
Формула / Реферат:
1. Лопатева система несучого гвинта вертольота, що містить лопаті з пристроєм зниження напружень в них та прогину при роботі і величини звисання їх кінців при стоянні, яка відрізняється тим, що цей пристрій виконують у вигляді плоского кругового ободу, до якого закріплюють зовнішні кінці лопатей і який площиною розташовують у площині розташування лопатей.2. Лопатева система за п. 1, яка відрізняється тим, що зовнішні кінці лопатей...
Несуча система вертольота
Номер патенту: 76882
Опубліковано: 15.09.2006
Автори: Гончарук Володимир Степанович, Казакевіч Андрєй Вячеслав, Петросов Валерій Альбертович, Чорний Анатолій Петрович
МПК: B64C 29/00, B64C 27/00, B64C 27/32
Мітки: вертольота, система, несуча
Формула / Реферат:
1. Несуча система вертольота, що має несучий гвинт з лопатями та додатковий пристрій збільшення її підіймальної сили, яка відрізняється тим, що додатковий пристрій виконаний у вигляді плоского набору розташованих радіально відрізків крил або виправляючих лопаток, який розміщений під лопатями несучого гвинта і закріплений на корпусі вертольота опорами. 2. Несуча система за п. 1, яка відрізняється тим, що набір відрізків крил або...
Пристрій для транспортування подовженого вантажу у горизонтальному положенні на зовнішній підвісці вертольота
Номер патенту: 6858
Опубліковано: 16.05.2005
Автори: Слюняєв Микола Миколайович, Конюхов Станіслав Миколайович, Мокін Олександр Васильович
МПК: B64C 17/00, B64D 9/00
Мітки: підвісці, подовженого, пристрій, горизонтальному, вертольота, вантажу, транспортування, зовнішній, положенні
Формула / Реферат:
1.Пристрій для транспортування подовженого вантажу у горизонтальному положенні на зовнішній підвісці вертольота, що містить транспортувальний трос з вузлом кріплення вантажу та засоби стабілізації, змонтовані на вантажі, який відрізняється тим, що засоби стабілізації виконані як циліндрична поперечна пластина і дві поздовжні вертикальні пластини, при цьому циліндрична поперечна пластина встановлена за допомогою кронштейна на передньому торці...
Спосіб бойового застосування комплексу протитанкового керованого ракетного озброєння вертольота по малошвидкісних повітряних цілях
Номер патенту: 23261
Опубліковано: 10.05.2007
Автори: Курдюк Володимир Федорович, Шевченко Олексій Валерійович, Куровська Тетяна Юріївна, Венгер Олександр Васильович, Майстров Олексій Олексійович, Петін Олександр Петрович, Семон Богдан Йосипович
МПК: F41G 9/00, G02B 23/00
Мітки: спосіб, вертольота, протитанкового, керованого, комплексу, озброєння, бойового, повітряних, цілях, малошвидкісних, застосування, ракетного
Формула / Реферат:
Спосіб бойового застосування комплексу протитанкового керованого ракетного озброєння вертольота по малошвидкісній повітряній цілі, при якому екіпаж пілотує вертоліт у район бойових дій, виконує з використанням бортового оптико-механічного гіростабілізованого приладу спостереження візуально-інструментальний огляд оточуючого простору, проводить пошук, виявлення та ідентифікацію цілі, оцінює відстань від вертольота до вибраної цілі шляхом...
Незалежна установка теплообміну між первинним носієм і вторинним носієм, зокрема повітрям, для вентиляції і кондіціювання повітря приміщення
Номер патенту: 7141
Опубліковано: 30.06.1995
Автор: Ойженіус Мішаль Рілєвскі
Мітки: повітрям, повітря, носієм, незалежна, теплообміну, установка, вторинним, кондиціювання, приміщення, первинним, зокрема, вентиляції
Формула / Реферат:
1. Независимая установка теплообмена между первичным носителем и вторичным носителем, в частности воздухом, для вентиляции и кондиционирования воздуха помещения или комнаты в здании, содержащая теплообменник с каналами первичного и вторичного носителей, и по меньшей мере один побудитель циркуляции для носителя, при этом теплообменник выполнен в виде ящика параллелепипедной формы, содержащего параллельные стенки, ограничивающие два...
Попередній патент: Спосіб одержання епоксидної композиції
Наступний патент: Вологозахищений світильник із світлодіодами
Випадковий патент: Біологічно активний препарат "глютам 1м"