Механізм підйому затвора водонапірної греблі
Номер патенту: 29345
Опубліковано: 10.01.2008
Автори: Шевченко Микола Іванович, Удовенко Сергій Олександрович, Дзержинський Віталій Олександрович, Хорунжий Володимир Дмитрович
Формула / Реферат
1. Механізм підйому затвора водонапірної греблі, що містить встановлений на валу в підшипникових опорах барабан, зв'язаний за допомогою гнучкого зв'язку із затвором греблі, і привід механізму підйому, який відрізняється тим, що привід механізму підйому виконаний у вигляді гідроприводу з високомоментним низькообертовим гідродвигуном, оснащеного автоматизованою системою керування.
2. Механізм підйому затвора водонапірної греблі за п. 1, який відрізняється тим, що автоматизована система керування виконана у вигляді програмованого командоконтролера і аналогових датчиків контролю положення затвора греблі.
Текст
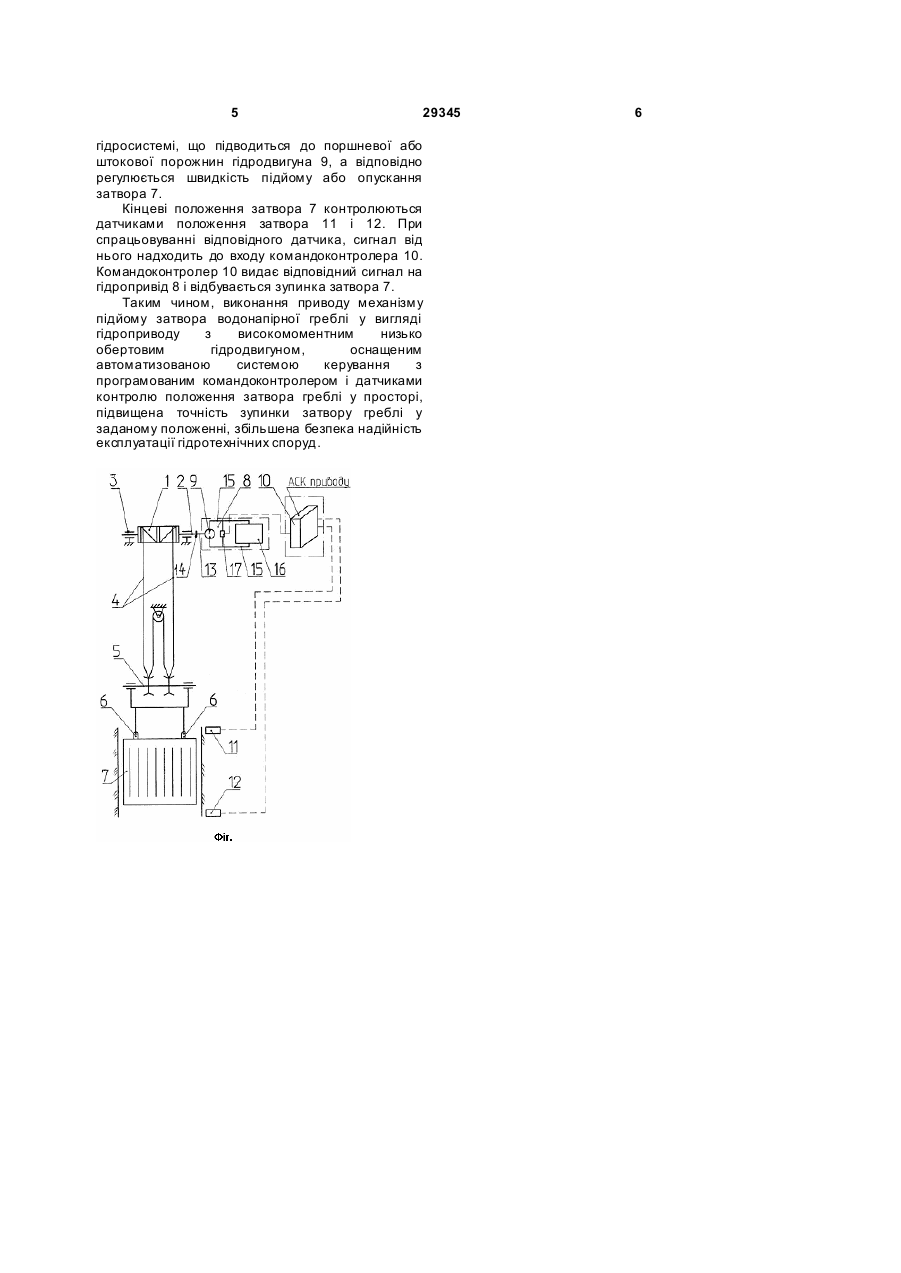
1. Механізм підйому затвора водонапірної греблі, що містить встановлений на валу в 3 29345 електродвигуном, що обумовлена наявністю зазорів в зубчатих зачепленнях редуктора і муфтах приводу, а також великими габаритами і масою затвора. Це ускладнює маневрування затвором, знижує точність зупинки затвора в заданому положенні, що зрештою знижує експлуатаційну надійність механізму і безпеку його експлуатації. В основу корисної моделі поставлена задача створити механізм підйому затвора греблі підвищеної експлуатаційної надійності і безпеки. Рішення цієї задачі забезпечується за рахунок технічного результату, що полягає в усуненні інерційних навантажень, що виникають в механізмі підйому затвора при його пуску і зупинці, шляхом виключення з приводу електродвигуна, редуктора і муфт, і за рахунок виконання приводу механізму підйому затвора у вигляді гідроприводу з високомоментним низько обертовим гідродвигуном, оснащеного автоматизованою системою керування, що включає програмований командоконтролер і аналогові датчики контролю положення затвора греблі. Додатковий технічний результат полягає в збільшенні точності зупинки затвора греблі в заданому положенні, що також підвищує експлуатаційну надійність і безпеку механізму підйому затвора греблі. Для досягнення зазначеного технічного результату в механізмі підйому затвора водонапірної греблі, що містить встановлений на валу в підшипникових опорах барабан, зв'язаний за допомогою гнучкого зв'язку із затвором греблі і привід механізму підйому, привід механізму підйому виконаний у вигляді гідроприводу з високомоментним низько обертовим гідродвигуном, оснащеного автоматизованою системою керування, виконаною у вигляді програмованого командоконтролера і аналогових датчиків положення затвора греблі. Між відмінними ознаками і досягнутим технічним результатом існує причиннонаслідковий зв'язок. Тільки завдяки тому, що привід механізму підйому виконаний у вигляді гідроприводу з високомоментним гідродвигуном, оснащеного автоматизованою системою керування, що містить програмований командоконтролер і аналогові датчики положення затвора греблі, усунені інерційні сили, що виникають в механізмі підйому затвора при його пуску або зупинці, збільшена точність зупинки затвора в заданому положенні, підвищена експлуатаційна надійність і безпека роботи механізму підйому затвора водонапірної греблі. Вказаний технічний результат не можливо отримати, якщо із приведеної сукупності ознак виключити будь-який. Аналіз науково-технічної і патентної літератури показав, що в ній немає опису механізму підйому затвора, з ознаками, аналогічними відмінним ознакам корисної моделі, що заявляється, а це дає можливість зробити висновок, що дане рішення є новим. 4 Корисна модель, що заявляється, є промислово придатною, оскільки на ЗАТ НКМЗ розроблено ескізний проект механізму підйому затвора греблі з гідродвигуном та системою автоматичного керування гідроприводом. Заявлена корисна модель механізму підйому затвора греблі пояснюється кресленням, де: - на Фіг. показана кінематична схема механізму підйому затвора. Ме ханізм підйому затвора водонапірної греблі (див. Фіг.) включає барабан 1, виконаний з правою і лівою зовнішньою нарізкою під канат, жорстко закріплений на валу 2, встановленому в підшипникових опорах 3. На барабан 1 навивається підйомний канат 4, запасований у вантажну підвіску 5, зв'язану з провушинами 6 затвора греблі 7. Відмінною особливістю корисної моделі є те, що привід механізму підйому виконано у вигляді гідроприводу 8 з високомоментним мало обертовим гідродвигуном 9 і автоматизованою системою керування, виконаною у вигляді програмованого командоконтролера 10 і датчиків положення затвора - верхнього положення 11 і нижнього положення 12. Вихідний вал13 гідродвигуна 9 пов'язаний з валом 2 барабани 1 за допомогою муфти 14 Гідродвигун 9, за допомогою трубопроводів 15, з'єднаний із станцією гідроприводу 16. Керування гідроприводом 8 здійснюється автоматизованою системою керування (АСК): командоконтролера 10 і датчиків положення 11 і 12. Така відмінна особливість корисної моделі забезпечує відсутність сил інерції в роботі механізму підйому затвора при його пуску або зупинці, підвищує точність зупинки затвора в заданому положенні, що значно підвищує експлуатаційну надійність і безпеку роботи механізму підйому затвора греблі. Ме ханізм підйому затвора працює таким чином. Згідно часової циклограми опускання і підйому затвора, складається програма роботи механізму підйому і вводиться в програмований командоконтролер 10. Командоконтролер 10, у свою чергу, при виконанні операцій підйому або опускання затвора 7, включає станцію гідроприводу 16 з високомоментним гідродвигуном 9. Момент, що крутить, від валу 13 гідродвигуна 9 передається через муфту 14 на вал 2 барабана 1. Якщо при обертанні валу 2 з барабаном 1, відбувається навивання гілок каната 4 на барабані, то здійснюється підйом затвора 7 за допомогою вантажної підвіски 5, з'єднаної з провушинами 6 затвора 7. Якщо при обертанні барабана 1 відбувається змотування каната 4 з барабана 1, то затвор 7 рухається вниз. Регулювання швидкості підйому або опускання затвору 7 здійснюється командоконтролером 10 по відомому закону, за допомогою регулятора швидкості з пропорційним керувенням 17, шляхом регулювання витрати робочої рідини в 5 29345 гідросистемі, що підводиться до поршневої або штокової порожнин гідродвигуна 9, а відповідно регулюється швидкість підйому або опускання затвора 7. Кінцеві положення затвора 7 контролюються датчиками положення затвора 11 і 12. При спрацьовуванні відповідного датчика, сигнал від нього надходить до входу командоконтролера 10. Командоконтролер 10 видає відповідний сигнал на гідропривід 8 і відбувається зупинка затвора 7. Таким чином, виконання приводу механізму підйому затвора водонапірної греблі у вигляді гідроприводу з високомоментним низько обертовим гідродвигуном, оснащеним автоматизованою системою керування з програмованим командоконтролером і датчиками контролю положення затвора греблі у просторі, підвищена точність зупинки затвору греблі у заданому положенні, збільшена безпека надійність експлуатації гідротехнічних споруд. 6
ДивитисяДодаткова інформація
Назва патенту англійськоюMechanism for lifting gate of water-pressure dam
Автори англійськоюKhorunzhyi Volodymyr Dmytrovych, Shevchenko Mykola Ivanovych, Dzerzhynskyi Vitalii Oleksandrovych, Udovenko Serhii Oleksandrovych
Назва патенту російськоюМеханизм подъема затвора водонапорной плотины
Автори російськоюХорунжий Владимир Дмитриевич, Шевченко Николай Иванович, Дзержинский Виталий Александрович, Удовенко Сергей Александрович
МПК / Мітки
МПК: E02B 7/00
Мітки: затвора, підйому, механізм, греблі, водонапірної
Код посилання
<a href="https://ua.patents.su/3-29345-mekhanizm-pidjjomu-zatvora-vodonapirno-grebli.html" target="_blank" rel="follow" title="База патентів України">Механізм підйому затвора водонапірної греблі</a>
Гідропривід підйому затвора водонапірної греблі
Номер патенту: 26448
Опубліковано: 25.09.2007
Автори: Дзержинська Любов Олександрівна, Удовенко Сергій Олександрович, Кононенко Олексій Михайлович, Хорунжий Володимир Дмитрович
МПК: E02B 7/26
Мітки: гідропривід, греблі, підйому, водонапірної, затвора
Формула / Реферат:
1. Гідропривід підйому затвора водонапірної греблі, що містить станцію, трубопроводи гідроприводу, гідроциліндр, шток якого рухомо зв'язаний із затвором, а корпус гідроциліндра, забезпечений провушиною, рухомо встановлений на осі кронштейна, жорстко закріпленого на фундаменті греблі, крізну і глуху кришки, зв'язані своїми робочими поверхнями з бічними поверхнями провушини, розподільний пристрій, що містить рухомий ротор, жорстко закріплений...
Гідропривід затвора водонапірної греблі
Номер патенту: 11266
Опубліковано: 15.12.2005
Автори: Серьга Вячеслав Дмитрович, Хорунжий Володимир Дмитрович, Шевченко Микола Іванович, Токарев Олексій Захарович
МПК: E06B 9/56
Мітки: затвора, греблі, гідропривід, водонапірної
Формула / Реферат:
Гідропривід затвора водонапірної греблі, що містить робочі гідроциліндри, кінематично зв'язані з затвором, і гідравлічну систему керування гідроциліндрами, що містить блоки керування штоковою і поршневою порожнинами гідроциліндрів, який відрізняється тим, що блоки керування штоковою й поршневою порожнинами виконані з гідрозамками і загальним гідравлічним розподільником для керування зазначеними гідрозамками.
Механізм підйому крила культиватора

Номер патенту: 16716
Опубліковано: 15.08.2006
Автор: Атрощенко Володимир Іванович
МПК: A01B 63/10
Мітки: механізм, крила, культиватора, підйому
Формула / Реферат:
Механізм підйому крила культиватора, який містить гідроциліндр та колісний важіль, який відрізняється тим, що колісний важіль однією стороною приварений до труби, яка розміщена в зігнутих з листового матеріалу півциліндрах, з'єднаних між собою болтами, які, охоплюючи трубу, утворюють корпуси підшипників ковзання, що приварені до поперечних брусів рами крила культиватора і містять упори для обмеження осьового переміщення труби, а другою, де...
Механізм підйому енергозасобу

Номер патенту: 81538
Опубліковано: 10.01.2008
Автори: Яблуновський Василь Сергійович, Павлик Володимир Іванович, Кумпан Віктор Карпович, Тарарака Андрій Геннадійович
МПК: A01D 34/02
Мітки: енергозасобу, підйому, механізм
Формула / Реферат:
Механізм підйому енергозасобу, що складається з двоплечих важелів, одне плече яких виконано у вигляді захватів для агрегатування з адаптером (косаркою, жниваркою та іншою сільгоспмашиною), важелів, що шарнірно з'єднані з гідроциліндрами підйому, нижніх важелів, пружин зрівноваження, який відрізняється тим, що на важелях, одне плече яких виконано у вигляді захватів, установлені додаткові важелі з можливістю прокручування та фіксації, які...
Механізм підйому мостового крана

Номер патенту: 62308
Опубліковано: 15.12.2003
Автори: Шебанова Тетяна Володимировна, Шебанов Ігор Володимирович
МПК: B66C 17/00
Мітки: мостового, крана, підйому, механізм
Формула / Реферат:
1. Механізм підйому мостового крана, який має вантажний барабан, крановий редуктор, електродвигуни основної та установочної швидкості підйому, вали, гальма, який відрізняється тим, що прохідний вал редуктора в середній частині обладнаний хрестовиною з цапфами, які сполучені з сателітами обертання.2. Механізм за п. 1, який відрізняється тим, що сателіти обертання кінематично зв'язані з двома зубчастими конічними колесами, при цьому...
Попередній патент: Дистанційно керований транспортний засіб
Наступний патент: Спосіб багатоукісного використання на зелений корм рослин сильфію пронизанолистого (silphium perfoliatum l.)
Випадковий патент: Спосіб і пристрій для виготовлення слябів