Пристрій для контролю відхилень від прямолінійності
Номер патенту: 6565
Опубліковано: 29.12.1994
Автори: Ісаков Станіслав Васильович, Кузенко Вячеслав Григорович, Бражник Євгеній Георгійович, Колісник Євгеній Сергійович, Лугін Володимир Павлович
Формула / Реферат
(57) Устройство для контроля отклонений от прямолинейности, содержащее корпус, установленные на его торцах базовые опоры и отсчетные узлы, а центр тяжести корпуса расположен в плоскости, равноудаленной от базовых опор, отличающееся тем, что оно снабжено штангой, соединенной с корпусом посредством узла развязки, выполненного в виде карданного подвеса, механизмом осевого перемещения штанги с датчиком пройденного пути, механизмам вращения контролируемой детали с датчиком углового поворота и блоком обработки сигналов датчиков, базовые опоры выполнены в виде двух колец в форме усеченного тора, отсчетные узлы выполнены в виде датчиков касания и линейного перемещения, при этом датчик перемещения выполнен в виде закрепленной одним концом в корпусе упругой консольной балки в форме пластинки, на обеих поверхностях которой осесимметрично установлены четыре тензорезистора, а датчик касания - в виде штока, установленного в корпусе перпендикулярно его оси на фиксированном расстоянии между кольцами базовых опор, а его внутренний конец, выполненный в виде полусферы, подпружинен свободным концом балки.
Текст
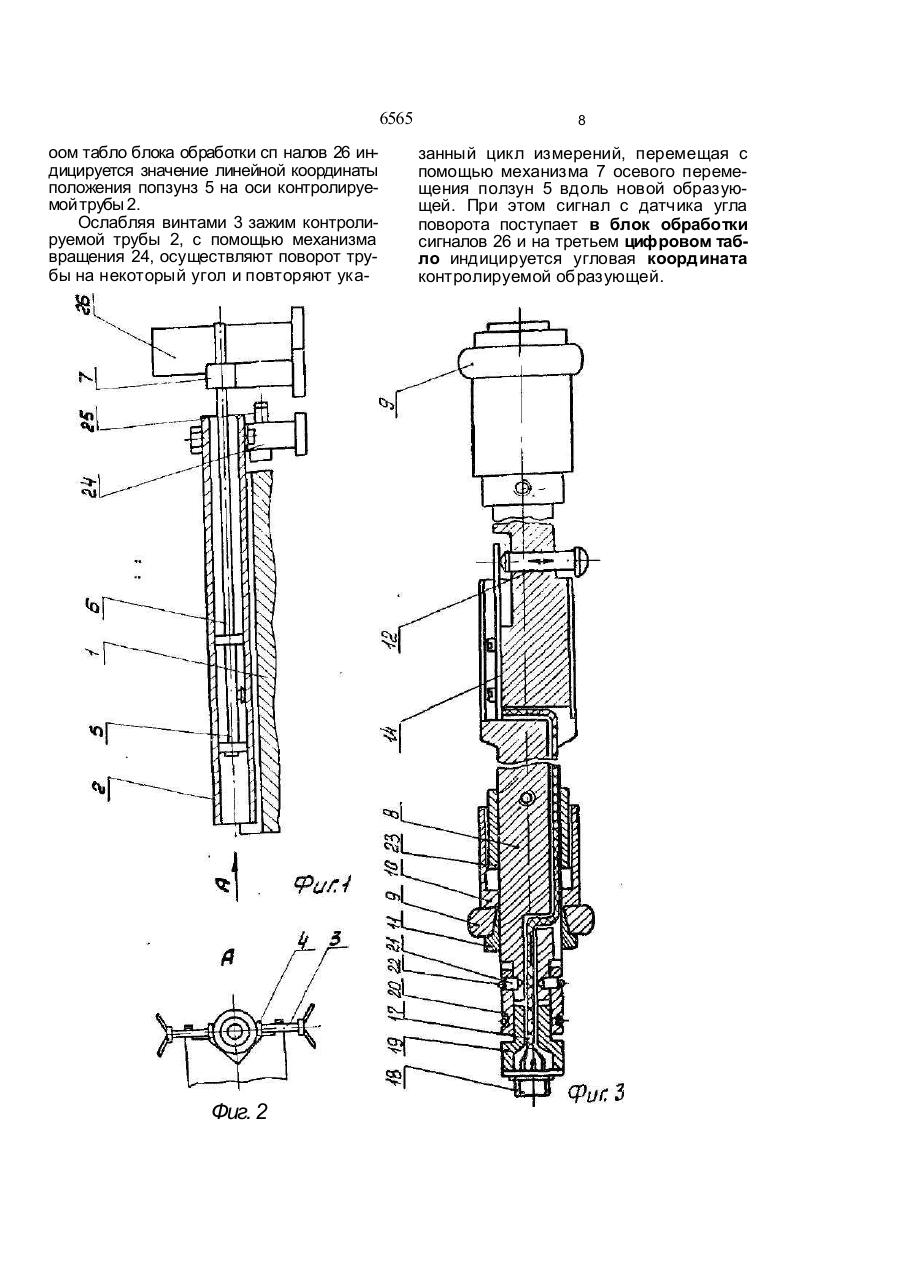
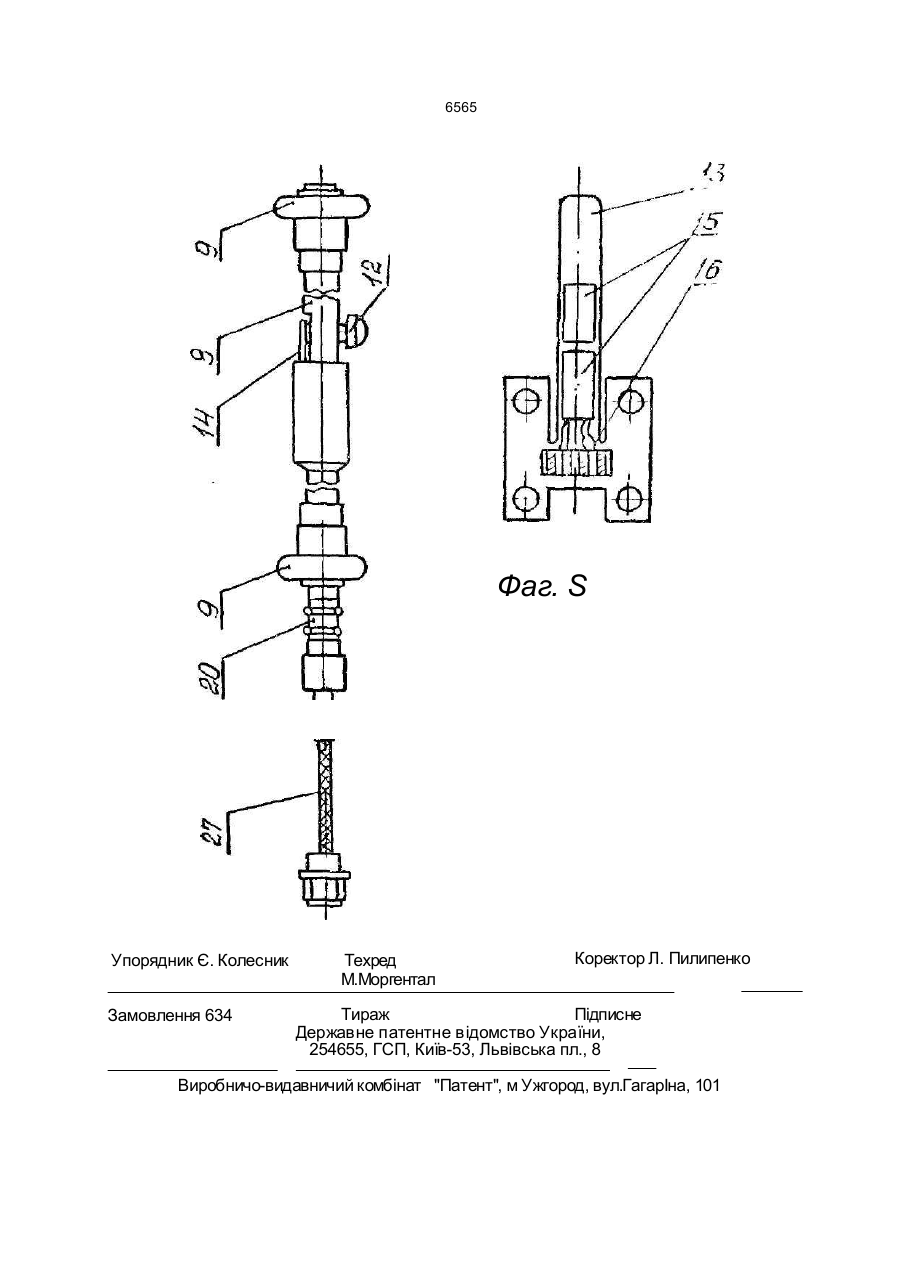
Устройство для контроля отклонений от прямолинейности, содержащее корпус, ус тановленные на его торцах базовые опоры и отсчетные узлы, а центр тяжести корпуса расположен в плоскости, равноудаленной от базовых опор, о т л и ч а ю щ е е с я тем, что оно снабжено штангой, соединенной с корпусом посредством узла развязки, выполненного в виде карданного подвеса, механизмом осевого перемещения штанги с датчиком пройденного пути, механизмам вращения контролируемой детали с датчиком углового поворота и блоком обработки сигналов датчиков, базовые опоры выполнены в виде двух колец в форме усеченного тора, отсчетные узлы выполнены в виде датчиков касания и линейного перемещения, при этом датчик перемещения выполнен в виде закрепленной одним концом в корпусе упругой консольной балки в форме пластинки, на обеих поверхностях которой осесимметрично ус тановлены четыре тензорезистора, а датчик касания - в виде штока, установленного в корпусе перпендикулярно его оси на фиксированном расстоянии между кольцами базовых опор, а его внутренний конец, выполненный в виде полусферы, подпружинен свободным концом балки. Изобретение относится к измерительном технике, связанной с контролем отклонения от прямолинейности образующих цилиндрических деталей и может быть использовано для автоматизированного контроля прям олин ейнос ти внутренн их образующих длинномерных труб. Известно устройство (1), содержащее корпус, два датчика перемещения, установленные на корпусе, два датчика касания, выполненные в виде движка с цапфой и роликом на одном конце и расположенной по середине движка второй цапфы, с которой взаимодействуют вилкообразные плечи двухплечных рычагов, на вторых плечах которых установлены ролики, взаимодействующие с помощью серьги с плечом другого рычага, образуя Z-образное шарнирное соединение, контактирующее с подпружиненным тросом, причем два кинематически несвязанных троса соединены одними концами с корпусом, а другими - с соответствующим датчиком перемещения. Недостатком да иного устройства является сложность кон г* 6565 глрукции. наличие опосредованной связи между датчиками касания и датчиками перемещения в виде тросовых соединений, подпружиниваемых рядом роликов, расположенных на рычагах. Последнее обстоятельство приводит к 5 увеличению погрешностей измерений Кроме того, в данном устройстве отсутствует возможность увязки контролируемого отклонения образующей от линейности с линейной координатой, связанной с осью трубы, а также 10 отсутствует возможность вращения контролируемой трубы вокруг собственной оси и определения ее угла поворота Таким образом, рассматриваемое устройство обладает сравнительно низкой точностью измерений, 15 ограниченными функциональными возможностями и не может быть практически ис- пользовано для автоматизированного контроля труб с малым диаметром. Наиболее близким по технической сущ- 20 ности к изобретению является устройство (2), содержащее корпус, установленные на его торцах отсчетные узлы и базовые опоры, причем последние установлены так, что центр тяжести устройства расположен в 25 плоскости, равноудаленной от базовых опор. При этом базовые опоры выполнены в виде соосно установленных подшипников качения. Данное устройство не обладает возмож- 30 ностью автоматизации контроля, это связано с тем, что в нем отсутствуют механизм осевого перемещения корпуса и механизм вращения трубы с указателями соответству- . ющих перемещений. К тому же, при много- 35 кратном передвижении корпуса вдоль образующей происходит разбивка подшипников качения при установке их соосно с корпусом, что обусловливает увеличение погрешностей измерений за счет наличия люф- 40 тов в узлах базовых опор. Последнее обстоятельство приводит к ограничению возможности использования данного устройства только для контроля полых цилиндрических деталей, длина которых сравнима 45 с расстоянием между базовыми опорами. В случае же установки подшипников качения так, что их оси будут перпендикулярны оси корпуса, осложняется передвижение последнего в полости контролируемой цилин- 50 дрической детали в процессе вращения пос ледней вокруг с обственной ос и. При этом, также происходит разбивка подшипников качения при многократном выполнении измерительных операций и в конечном 55 итоге уменьшается точность измерений из-за наличия люфтов в базовых опорах. Следовательно, рассматриваемое устройство обладает ограниченными функциональными возможностями и не позволяет выполнять автоматизированный контроль внутренних образующих длинномерных цилиндрических деталей с достаточно высокой точностью измерений. Целью изобретения является обеспечение возможности использования устройства для автоматизированного контроля внутренней образующей длинномерных труб и повышение точности контроля. Поставленная цель достигается благодаря тому, что устройство для контроля отклонений от прямолинейности, содержащее корпус, установленные на его торцах базовые опоры и отсчетные узлы, а центр тяжести корпуса расположен в плоскости, равноудаленной от базовых опор, согласно изобретению, снабжена штангой, соединенной с корпусом посредством узла развязки, выполненного в виде карданного подвеса, механизмом осевого перемещения штанги с датчиком пройденного пути, механизмом вращения контролируемой детали с датчиком углового поворота и блоком обработки сигналов датчиков, базовые опоры выполнены в виде двух колец в форме усеченного тора, отсчетные узлы выполнены в виде датчиков касания и линейного перемещения, при этом, датчик перемещения выполнен в виде закрепленной одним концом в корпусе упругой консольной балки в форме пластинки, на обеих поверхностях которой осесимметрично установлены четыре тензорезистора, а датчик касания г в виде штока, установленного в корпусе перпендикулярно его оси на фиксированном расстоянии между кольцами базовых опор, а его внутренний конец, выполненный в виде полусферы, подпружинен свободным концом балки. Сущность изобретения поясняется чертежами, где на фиг.1 показан общий вид устройства; на фиг.2 -узел крепления контролируемой детали на станине, вид по стрелке А: на фиг.З - ползун с базовыми опорами и с элементами соединения со штангой; на фиг.4 - ползун со штангой, общий вид; на фиг.5 - датчик линейного перемещения. Устройство контроля отклонена от прямолинейности внутренней образующей цилиндрической детали содержит основание 1 с V-образным пазом для контролируемой цилиндрической детали 2, установленные на конце основания два прижимных винта 3- на обращенных к контролируемой детали 2 концах которых укреплены пятки 4, ползун 5, штанга 6, механизм 7 осевого перемещения штанги 6. Ползун 5 состоит из корпуса 8, на концах которого установлены два кольца 9 базовых опор, крепление которых осуществлено с помощью обоймы 10 и заклинивающ ею цэнгооого кольца 11, на корпусе 8 также установлен датчик касания 12 в виде штока со сферическими концами, один из которых подпружинивается упругой консольной балкой 13 датчика линейного пе- 5 ремещ ения 14, при этом второй конец упру-гой консольной балки 13 жестко укреплен на корпусе 8, а на поверхности консольной балки 13, выполненной в виде плоской пласти ны, например, из титана, осесимметрично с 10 двух сторон жестко укреплены четыре тензо резистора 15. соединенные электрически пос редством контактных площадок 16 и жгута 17 с электрическим разъемом 18, который установлен на втулке 19, жестко укреплен- 15 ной в переходной обойме 20 карданного подвеса. Переходная обойма 20 соединена с концом корпуса 8 с помощью шти фтов 21, фиксируемых кольцевой пружиной 22 Подобным образом с помощью подпружиненных 20 шти фтов {не указаны на чертеже) осуществляется плавающ ее соединение переходной обоймы 20 с втулкой 19. Жгут 17 прижимается к корпусу 8 с помощью втулки 23. Устройство содержит также механизм 24 вращения 25 контролируемой детали 2 с датчиком углового поворота, приводимый в действие с помощ ью элек тродв ига те ля 25. В состав устройства входит также блок обработки сигналов 26, соединенный с датчиками с по - 30 мощью кабеля 27. Кольца 9 выполнены в виде усеченных торов, т.е. внешние поверхности закруглены, это позволяет облегчить осевое и угловое перемещение ползуна 5 в полости контролируемой детали 2, а также 35 обеспечить точечное касание базовых опор в процессе выполнения измерений. Механизм осевого перемещения 7 реализован в виде редуктора, соединенного с одной стороны с электродвигателем 25, а с другой - с 40 фиксированным роликом, прижатым к штанге 6. При этом, в роли датчика пройденного пути выступает счетчик оборотов фрикционного ролика. Механизм вращения 24 контролируемой цилиндрической детали 2 состоит 45 из редуктора, электродвигателя 25 и фрикционного ролика, прижатого к контролируемой детали 2. К фрикционному ролику подсоединен датчик углового положения. Узлы механизмов осевого перемещения 7 и углового 50 вращ ения 24, а также датчики пройденного пути и угло во го положения на чертежах не показаны. Устрой ство работает следующим обра зом. 55 Перед выполнением контролируемых операций в паз основания 1 укладывается контролир уемая деталь 2, например труба, и зажимается вин тами 3, причем зажимное усилие выбирается таким образом, чтобы ис деформацию стенок мой трубы 2 при соприкогнопенни с 4. В ПОЛОСТЬ КОНТрОЛИруемОИ трубьі 2 ВВОДИТСЯ ползун 5 с помощью штанги 6 и механи зм а осе вог о п е р ем ещ е ни я 7. R стационарном режиме под действием тяжести ползун 5 занимает положение с минимум ом п о те н ц иа ль н о й эн е р г ии , ч то соответствует параллельности осей корпуса 8 ползуна и контролируемой трубы 2. При этом корпус 8 лежит на кольцах 9 базовых опор. Шток 12 соприкасается с поверхностью контролируемой трубы 2 в силу того, что он подпружинивается консольной балкой 13 датчика линейного перемещения 14. Электрический сигнал, снимаемый с тензорезисторов 15, включенных по мостовой схеме, поступает через контактные площ адки 16, жгут 17, электрический разьем 18 и кабельное соединение 27 в блок обработки сигналов 26. На цифровом табло блока обработки сигналов 26 индицируется значение прогиба внутренней образующей контролируемой трубы 2, определяемого на базовом расстоянии, равном геометрическому рас стоянию между базовыми опорами 9. В динамическом режиме ползун 5 посредством штанги 6 и механизма осевого перемещения 7 с определенной скоростью перемещается вдоль образующей цилиндрической детали. Под действием силы тяжести кольца 9 базовых опор контактируют с внутренней поверхностью контролируемой трубы 2 и ось корпуса 8 остается параллельной оси контролируемой трубы. При этом, штанга 6 свободно вращается в некоторых пределах в переходной обойме 20, предотвращая тем самым действие возможно возникающих вращающ их моментов на ползун 5. Шток 12, соприкасаясь с внутренней поверхностью контролируемой трубы 2, передвигае тся в вер тика льном нап рав ле ни и и сказывается силовое воздействие на упру гую консольную балку 13 датчика перемещений 14. Движение конца консольной балки 13 повторяет практически изменения изгиба внутренней образующей контролируемой трубы 2 и преобразуется с помощью тензорезисторов 13 в изменение электрического сигнала, который поступает через жгут 17, разъем 18 и кабель 27 в блок обработки сигналов 26. На цифровом табло блока обработки сигналов 26 индицируется изменение прогиба внутренней образующей контролируемой трубы 2. При этом, с датчика пройденного пу ти механизма осевого перемещения 7 поступает сигнал, свидетельствующий о линейной координате расположения ползуна 5 на оси контролируемой трубы 2. В результате обработки этого сигнала на втором цифро 6565 оом табло блока обработки сп налов 26 индицируется значение линейной координаты положения попзунз 5 на оси контролируемой трубы 2. Ослабляя винтами 3 зажим контролируемой трубы 2, с помощью механизма вращения 24, осуществляют поворот трубы на некоторый угол и повторяют ука Фиг. 2 8 занный цикл измерений, перемещая с помощью механизма 7 осевого перемещения ползун 5 вдоль новой образующей. При этом сигнал с датчика угла поворота поступает в блок обработки сигналов 26 и на третьем цифровом табло индицируется угловая координата контролируемой об разующей. 6565 Фаг. S Упорядник Є. Колесник Замовлення 634 Техред М.Моргентал Коректор Л. Пилипенко Тираж Підписне Державне патентне відомство України, 254655, ГСП, Київ-53, Львівська пл., 8 Виробничо-видавничий комбінат "Патент", м Ужгород, вул.ГагарІна, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of deflections from straightness
Автори англійськоюBrazhnyk Yevhenii Heorhiiovych, Kolisnyk Yevhenii Serhiiovych, Luhin Volodymyr Pavlovych, Isakov Stanislav Vasyl'ovich, Kuzenko Viacheslav Hryhorovych
Назва патенту російськоюУстройство для контроля отклонений от прямолинейности
Автори російськоюБражник Евгений Георгиевич, Колисник Евгений Сергеевич, Лугин Владимир Павлович, Исаков Станислав Васильевич, Кузенко Вячеслав Григорьевич
МПК / Мітки
МПК: G01B 5/28
Мітки: відхилень, контролю, пристрій, прямолінійності
Код посилання
<a href="https://ua.patents.su/6-6565-pristrijj-dlya-kontrolyu-vidkhilen-vid-pryamolinijjnosti.html" target="_blank" rel="follow" title="База патентів України">Пристрій для контролю відхилень від прямолінійності</a>
Пристрій контролю прямолінійності твірної циліндричної деталі
Номер патенту: 6563
Опубліковано: 29.12.1994
Автори: Ісаков Станіслав Васильович, Сорока Валерій Володимирович, Головко Володимир Сергійович, Шеметов Анатолій Ілліч, Шульга Віктор Федорович, Колісник Євгеній Сергійович, Бражник Євгеній Георгійович
Мітки: прямолінійності, контролю, твірної, циліндричної, пристрій, деталі
Формула / Реферат:
(57) Устройство контроля прямолинейности образующей цилиндрической детали, содержащее корпус, установленный на опорную поверхность измерительной платформы, три датчика с измерительными щупами, три измерительные линейки и блок обработки сигналов, снимаемых с датчиков, причем оси первого и второго щупов расположены параллельно, а ось третьего щупа - перпендикулярно опорной поверхности измерительной платформы, отличающееся тем, что устройство...
Пристрій для контролю внутрішнього діаметра труби
Номер патенту: 6564
Опубліковано: 29.12.1994
Автори: Колісник Євгеній Сергійович, Головко Володимир Сергійович, Шульга Віктор Федорович, Бражник Євгеній Георгійович, Шеметов Анатолій Ілліч, Ісаков Станіслав Васильович
МПК: G01B 5/08
Мітки: пристрій, внутрішнього, трубі, контролю, діаметра
Формула / Реферат:
(57) Устройство для контроля внутреннего диаметра трубы, содержащее основание, размещенные на нем стойки с опорными роликами, привод для вращения трубы, ползун, предназначенный для размещения в полости трубы с возможностью осевого перемещения и фиксации, механизм центрирования ползуна, механизм слежения за изменением внутреннего диаметра трубы в виде датчика касания и связанного с ним датчика перемещения и блок обработки сигналов, соединенный...
Пристрій для контролю вертикального установлення деталей
Номер патенту: 84
Опубліковано: 30.04.1993
Автор: Ільїчев Анатолій Федорович
МПК: G01M 19/00, G01C 15/10
Мітки: установлення, деталей, пристрій, контролю, вертикального
Формула / Реферат:
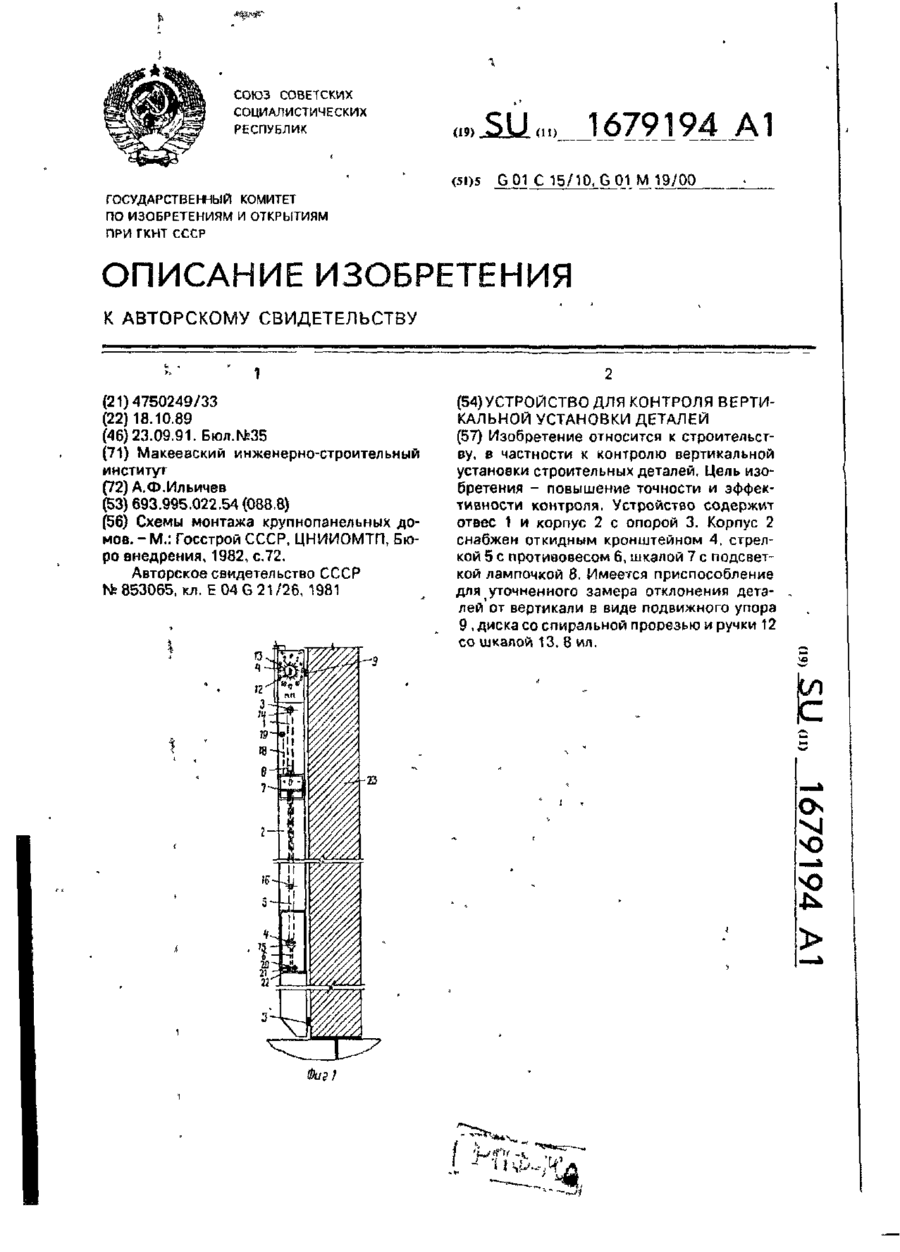
Формула изобретенияУстройство для контроля вертикальной установки деталей, содержащее отвес и корпус с опорой, отличающееся тем, что, с целью повышения точности и эффективности контроля, корпус снабжен откидным кронштейном, стрелкой с противовесом, шкалой с подсветкой и приспособлением для замера отклонения деталей от вертикали, причем корпус выполнен в виде полой рейки прямоугольного сечения, приспособление для замера отклонения деталей от...
Пристрій для контролю суцільності діелектричних покриттів

Номер патенту: 3806
Опубліковано: 27.12.1994
Автори: Грехньов Віктор Миколайович, Петренко Олександр Васильович, П'ятихін Леонід Ілларіонович
МПК: G01N 29/00
Мітки: пристрій, діелектричних, покриттів, суцільності, контролю
Формула / Реферат:
Устройство для контроля сплошности диэлектрических покрытий электропроводящих образцов, содержащее корпус, размещенную в корпусе емкость для электролита, сообщающееся с емкостью кольцо из пористого материала, источник постоянного напряжения, соединенные с ним два электрода, первый из которых предназначен для подключения к электропроводящему образцу, второй подсоединен к кольцу, индикатор, включенный между источником питания и одним из...
Пристрій для контролю спрацювання протектора шин
Номер патенту: 5101
Опубліковано: 28.12.1994
Автор: Вітов Альберт Анатолійович
Мітки: контролю, протектора, шин, спрацювання, пристрій
Формула / Реферат:
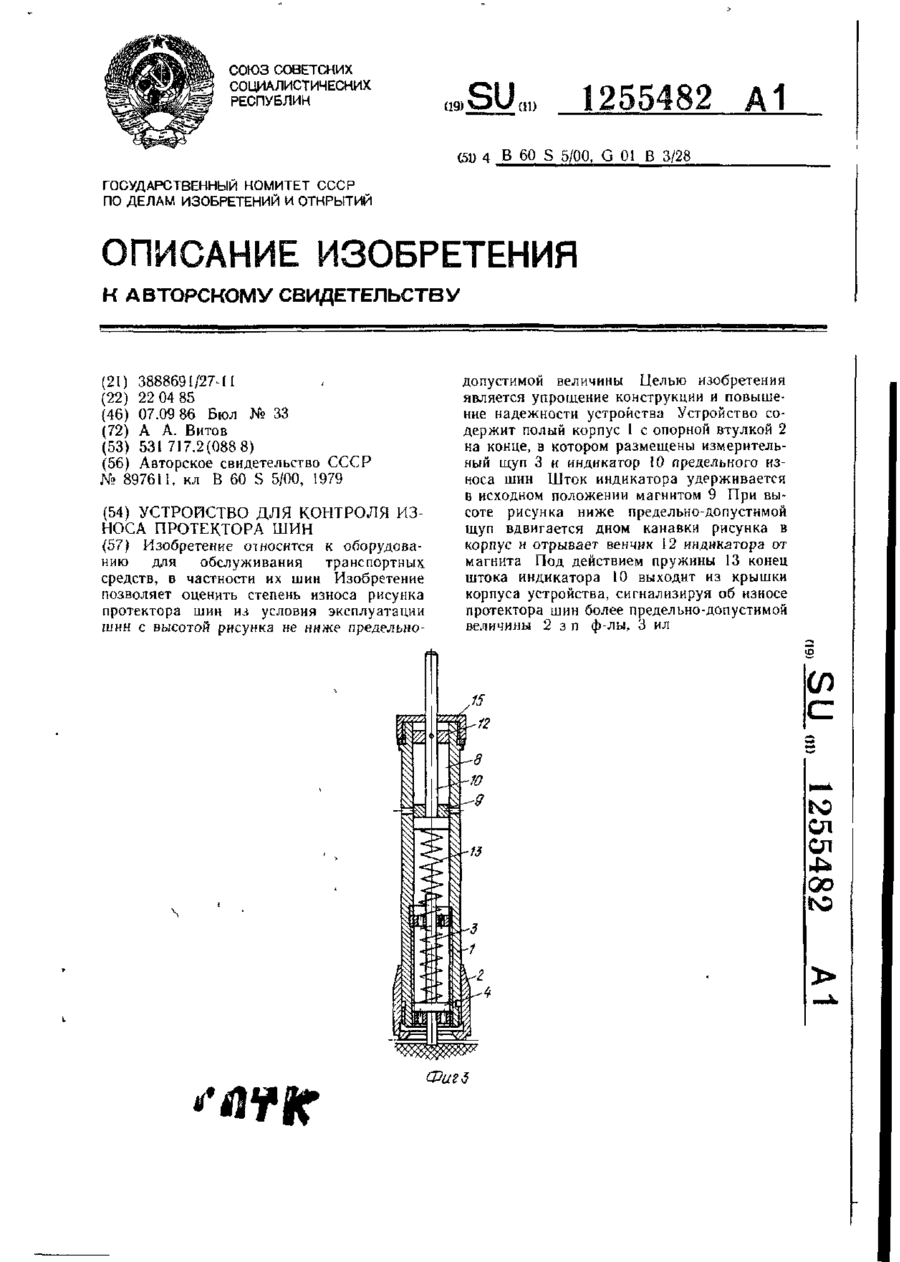
1. Устройство для контроля износа протектора шин, содержащее подвій корпус, опорную втулку и размещенные в корпусе щуп, подпружиненный к корпусу, сигнализатор предельно-допустимого износа шин и направляющую втулку для щупа, отличающееся тем, что, с целью упрощения конструкции, повышения надежности и удобства при эксплуатации, сигнализатор предельно-допустимого износа шин выполнен в виде магнита с отверстием, закрепленного в корпусе, и...