Спосіб керування гідравлічним робочим органом верстата
Номер патенту: 36962
Опубліковано: 10.11.2008
Автори: Угненко Віталій Петрович, Коротун Микола Миколайович
Формула / Реферат
Спосіб керування гідравлічним робочим органом верстата,що включає переміщення слідкуючої точки по контуру копіра, передачу позитивного або негативного електричного сигналу на електромеханічний перетворювач, зміщення струминної трубки під дією перетворювача праворуч або ліворуч, зміну тиску робочої рідини у торцевих камерах золотника, зміщення золотника від нейтрального положення, подачу робочої рідини під тиском через золотник в одну з порожнин гідроциліндра та переміщення формоутворюючої точки інструмента по скопійованому контуру, який відрізняється тим, що як копір використовують електронний контур виробу і одночасно порівнюють відхилення формоутворюючої точки інструмента від заданих параметрів копіра електронним копіюванням за допомогою тактильного датчика.
Текст
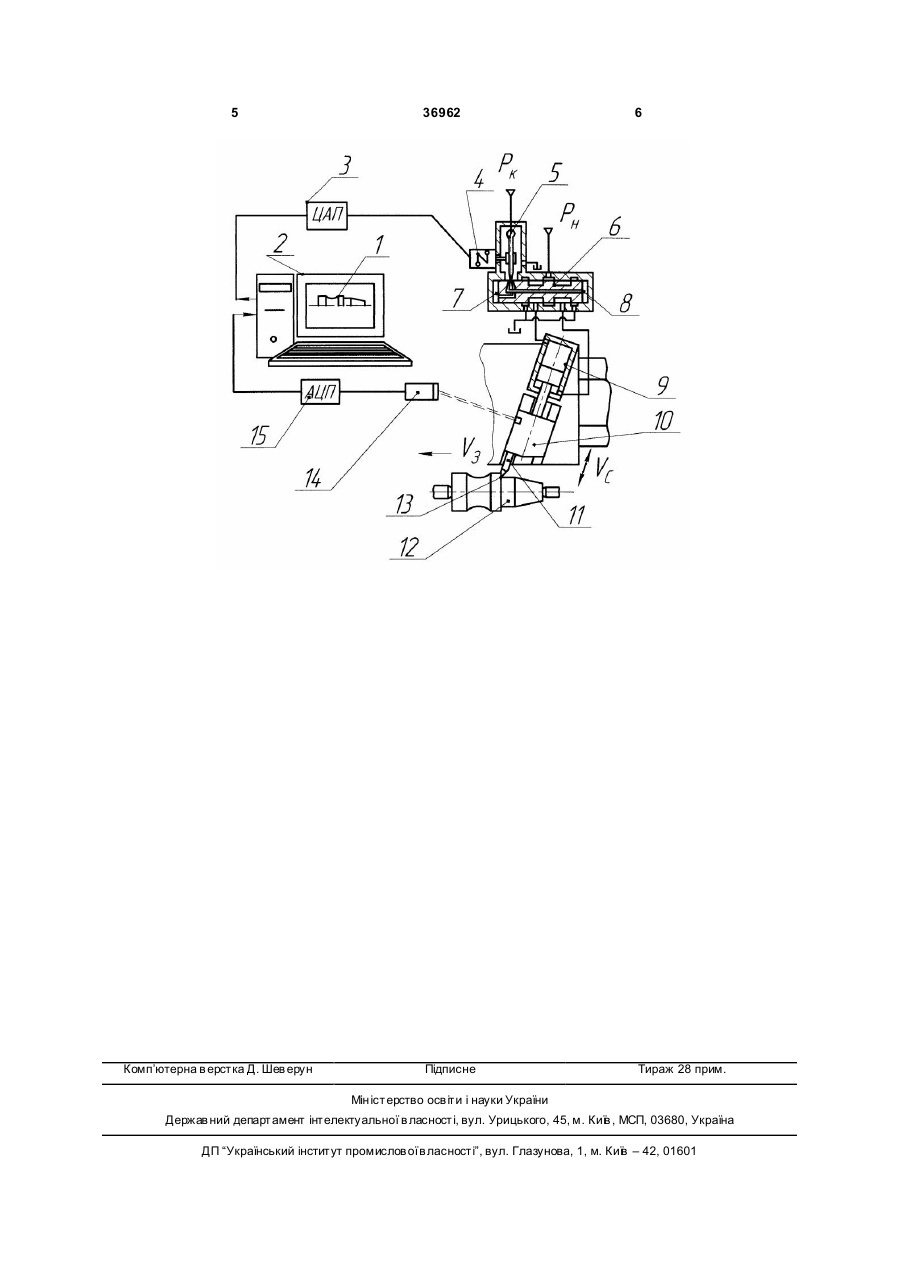
Спосіб керування гідравлічним робочим органом верстата, що включає переміщення слідкуючої точки по контур у копіра, передачу позитивного або негативного електричного сигналу на електромеханічний перетворювач, зміщення струминної 3 36962 цевих камерах золотника, зміщують золотник від нейтрального положення, подають робочу рідину під тиском через золотник в одну з порожнин гідроциліндра та переміщують формоутворюючу точку інструмента по скопійованому контуру, відповідно до корисної моделі, як копір використовують електронний контур виробу і одночасно порівнюють відхилення формоутворюючої точки інструмента від заданих параметрів копіра електронним копіюванням за допомогою тактильного датчика. Використання способу, що заявляється, у сукупності з усіма суттєвими ознаками, включаючи відмінні, дозволяє за рахунок електронного копіювання виробу за допомогою тактильного датчика забезпечити точність переміщень робочих органів гідравлічної системи верстата, виконувати одночасне порівняння відхилення формоутворюючої точки інструменту від заданих параметрів електронного контуру, що дозволяє здійснити корегування цього відхилення. Таке порівняння можливо створити тільки за допомогою ЕОМ. Оскільки електронний контур виробу є математичним описом профілю виробу та пов'язаний з гідравлічною системою верстата, то точність переміщень робочого органу верстата від точнішого електронного копіру у порівнянні з фізичним копіром дозволяє забезпечити точність обробки деталі, крім того зменшити час та трудовитрати на налагодження та обслуговування верстата. Сутність способу пояснюється кресленням, на якому показана схема способу керування гідравлічним робочим органом верстата. Де показано електронний копір 1 у вигляді зображення на моніторі ЕОМ 2. ЕОМ 2 має зв'язок з цифро - аналоговим перетворювачем 3 до якого під'єднано електромеханічний підсилювач 4 зі струминною трубкою 5. Золотник 6 має торцеві камери 7,8 та гідравлічне з'єднаний з силовим гідро циліндром 9, що в свою чергу жорстко з'єднаний з слідкуючою кареткою 10. Слідкуюча каретка 10 утримує різець 11, що контактує формоутворюючою точкою 13 з поверхнею оброблюваної деталі 12. Слідкуюча каретка 10 має оптичний зв'язок з тактильним дат 4 чиком 14, що з'єднаний з аналоге - цифровим перетворювачем 15, який трансформує електричний сигнал тактильного датчика в цифровий та передає його на ЕОМ 2. Спосіб здійснюється таким чином. Електронний контур (копір) 1 виробу вводять в спеціальну програму на ЕОМ 2. Таким еталоном може служити електронне креслення, виконане за допомогою будь-якої програми САПР для ЕОМ, наприклад, КОМП АС -графік , Autocad та ін. З ЕОМ 2 за допомогою спеціальної програми, яка обходить електронний контур слідкуючою точкою, надходить цифровий сигнал до цифро - аналогового перетворювача 3, в якому формується негативний чи позитивний електричний сигнал, що поступає на електромеханічний перетворювач 4, повертаючи струминну трубку 5 праворуч або ліворуч. При зміщенні кінця трубки 5 з нейтрального положення і з'єднаних з ними (до неї додається рідина під тиском рк ) у приймальних соплах і з'єднаних з ними торцевих камерах 7, 8 золотника 6 змінюється тиск, що призводить до зміщення золотника 6. При зміщенні золотника 6 з нейтрального положення рідина, що поступає до нього під тиском р н, подається в одну з порожнин гідроциліндра 9, який переміщує слідкуючу каретку 10 з різцем 11. Контролювання переміщення, одночасне порівняння відхилень формоутворюючої точки 13 різця 11 відносно електронного контуру (копіра) 1 здійснюють ЕОМ 2 через тактильний датчик 14, що має оптичний зв'язок із слідкуючою кареткою 10 та з'єднаний з аналого-цифровим перетворювачем 15. Цей ланцюг виконує функцію оберненого зв'язку. У результаті слідкуюча каретка 10 та формоутворююча точка 13 різця 11 у своєму р усі повторюють траєкторію слідкуючої точки, тобто форму копіра 1, що використовується для копіювальної обробки деталі 12. Таким чином, за допомогою електронного контуру виробу (копіра) можно керувати гідравлічним робочим органом верстата. Це забезпечує підвищення точності обробки виробу, а також можливість зміни та корекції копіра виробу. 5 Комп’ютерна в ерстка Д. Шев ерун 36962 6 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of hydraulic executive device of machine tool
Автори англійськоюKorotun Mykola Mykolaiovych, Uhnenko Vitalii Petrovych
Назва патенту російськоюСпособ управления гидравлическим рабочим органом станка
Автори російськоюКоротун Николай Николаевич, Угненко Виталий Петрович
МПК / Мітки
МПК: F15B 9/00
Мітки: спосіб, керування, робочим, гідравлічним, органом, верстата
Код посилання
<a href="https://ua.patents.su/3-36962-sposib-keruvannya-gidravlichnim-robochim-organom-verstata.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування гідравлічним робочим органом верстата</a>
Пристрій для керування робочим органом прохідницького щита
Номер патенту: 9366
Опубліковано: 30.09.1996
Автори: Мельников Іван Йосипович, Швиченко Олександр Володимирович, Ліндаєв Володимир Вікторович, Фішман Йосип Давидович, Яроцький Микола Іванович, Гарькавий Володимир Андрійович, Сєров Євген Семенович
МПК: E21D 9/06, E21C 35/24
Мітки: керування, робочим, щита, пристрій, прохідницького, органом
Формула / Реферат:
Устройство для управления рабочим органом проходческой машины, содержащеедва насоса, напорные магистрали с предохранительными и обратными клапанами, два блока соединенных последовательно гидрораспределителей управления гидроцилиндрами рабочего органа и дополнительный пятилинейный гидрораспределитель, один вход которого соединен с напорной магистралью одного из насосов, напорный золотник, обратные клапаны, сливную магистраль, отличающееся...
Система автоматизованого керування робочим органом транспортної мережі
Номер патенту: 48520
Опубліковано: 15.08.2002
Автори: Ощипок Ігор Миколайович, Занічковська Любов Володимирівна
МПК: B60W 10/00
Мітки: органом, керування, робочим, система, мережі, автоматизованого, транспортної
Формула / Реферат:
Система автоматизованого керування робочим органом транспортної мережі, що складається з робочого органа транспортної мережі, транспортного шляху з навантажувально-розвантажувальними постами, двигуна, яка відрізняється тим, що в робочому органі транспортної мережі встановлений блок пам'яті, забезпечений відповідними командами блока зв'язку, з’єднаного з пультом керування, укомплектованим програмованим мікропроцесором, блок пам'яті через блок...
Спосіб заміни каната в пристроях з поліспастним робочим органом
Номер патенту: 22351
Опубліковано: 25.04.2007
Автори: Воропай Андрій Анатолійович, Єпімахов Андрій Павлович, Артамонов Олександр Васильович, Півень Володимир Олександрович
МПК: B66B 19/00
Мітки: каната, поліспастним, спосіб, пристроях, органом, робочим, заміни
Формула / Реферат:
1. Спосіб заміни каната в пристроях з поліспастним робочим органом, який включає звільнення зношеного каната від кріплення на напірному барабані поліспастного робочого органа, з'єднання каната лебідки з одним з кінців зношеного каната і з'єднання нового каната з іншим кінцем зношеного каната, змотування зношеного каната з поліспастного робочого органа і запасування нового каната, звільнення нового каната від з'єднання із зношеним канатом і...
Двигун з робочим органом, що коливається
Номер патенту: 36687
Опубліковано: 10.11.2008
Автор: Святненко Віктор Олександрович
МПК: F02B 53/00
Мітки: двигун, коливається, робочим, органом
Формула / Реферат:
Двигун з робочим органом, що коливається, який містить корпус, на внутрішній циліндричній поверхні якого розміщені радіальні перегородки, що взаємодіють із встановленим всередині нього ротором з поршнями, з′єднаними з валом відбору потужності, шестернями й кривошипно-шатунним механізмом, впускні й випускні канали, який відрізняється тим, що кривошипно-шатунний механізм двигуна з′єднаний з ротором й розміщений всередині останнього,...
Машина для розсівання мінеральних добрив з дисковим робочим органом
Номер патенту: 58991
Опубліковано: 15.06.2005
Автори: Мойсеенко Володимир Костянтинович, Адамчук Валерій Васильович
МПК: A01C 17/00
Мітки: розсівання, органом, дисковим, машина, робочим, мінеральних, добрив
Формула / Реферат:
1. Машина для розсівання мінеральних добрив з дисковим робочим органом, що містить бункер з дозатором, розсівальний диск, з'єднаний з механізмом приводу в обертальний рух, лопатки, закріплені на верхній робочій поверхні диска, обичайку, встановлену над робочою поверхнею диска, в стінці якої, в зоні контакту з диском, виконані отвори, яка відрізняється тим, що обичайка нерухомо зв'язана з диском, а її стінка або її умовне продовження розділяє...
Попередній патент: Спосіб оцінки стану стійкості відвалу з різноміцних порід
Наступний патент: Паливний фільтр
Випадковий патент: Спосіб одержання правастатину з компактину за допомогою штаму micromonospora