Надлишковий блок двигунів-маховиків
Номер патенту: 42893
Опубліковано: 27.07.2009
Автори: Кулік Анатолій Степанович, Резнікова Ольга Вікторівна, Субота Анатолій Максимович, Фірсов Сергій Миколайович

Формула / Реферат
Надлишковий блок двигунів-маховиків, що містить у своєму складі три двигуни-маховики, що встановлені вздовж осей зв'язаної системи координат космічного апарата, який відрізняється тим, що вздовж кожної із осей установлено додатково по одному двигуну-маховику, при цьому кінетичні моменти двох двигунів-маховиків, встановлених на одній осі, мають протилежний напрям.
Текст
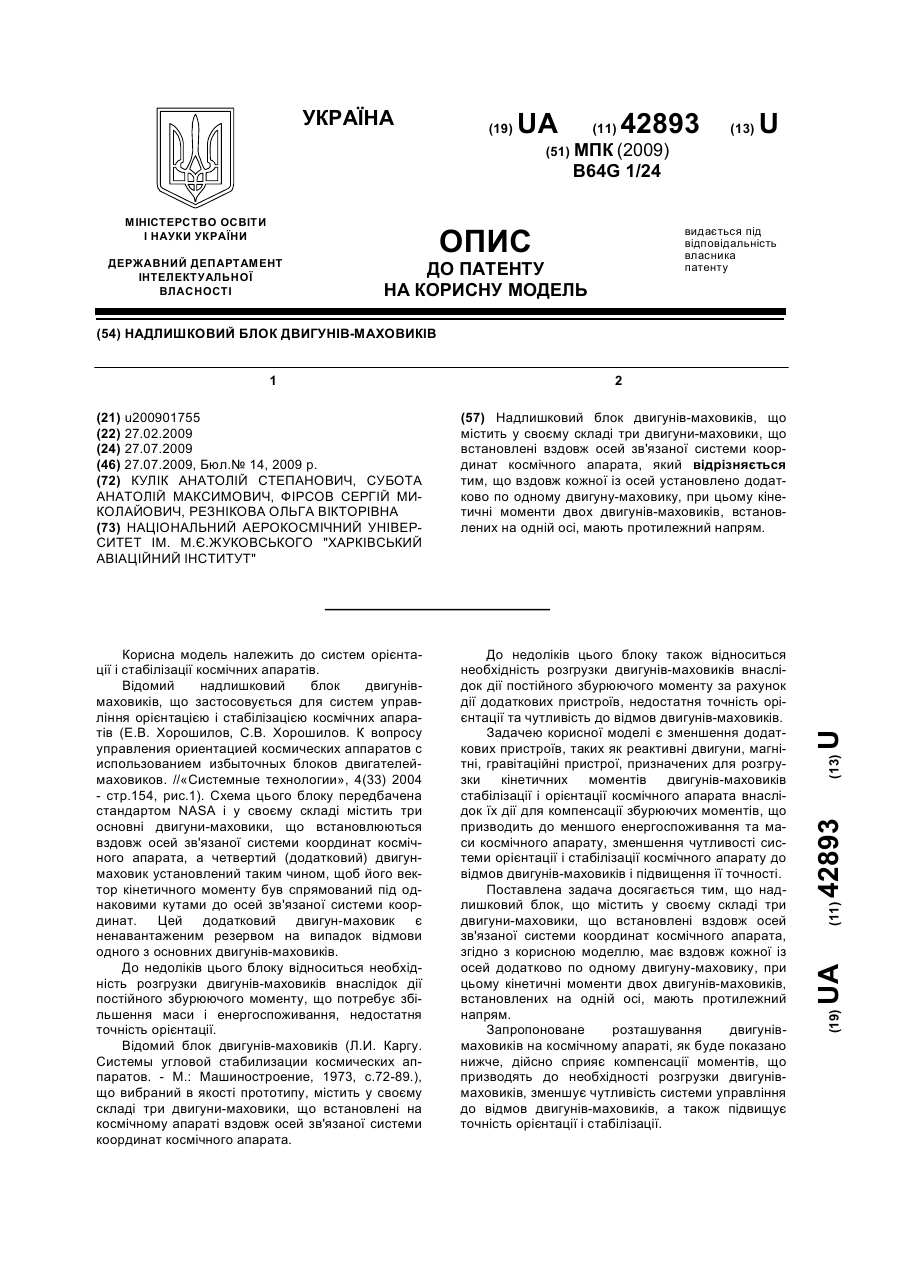
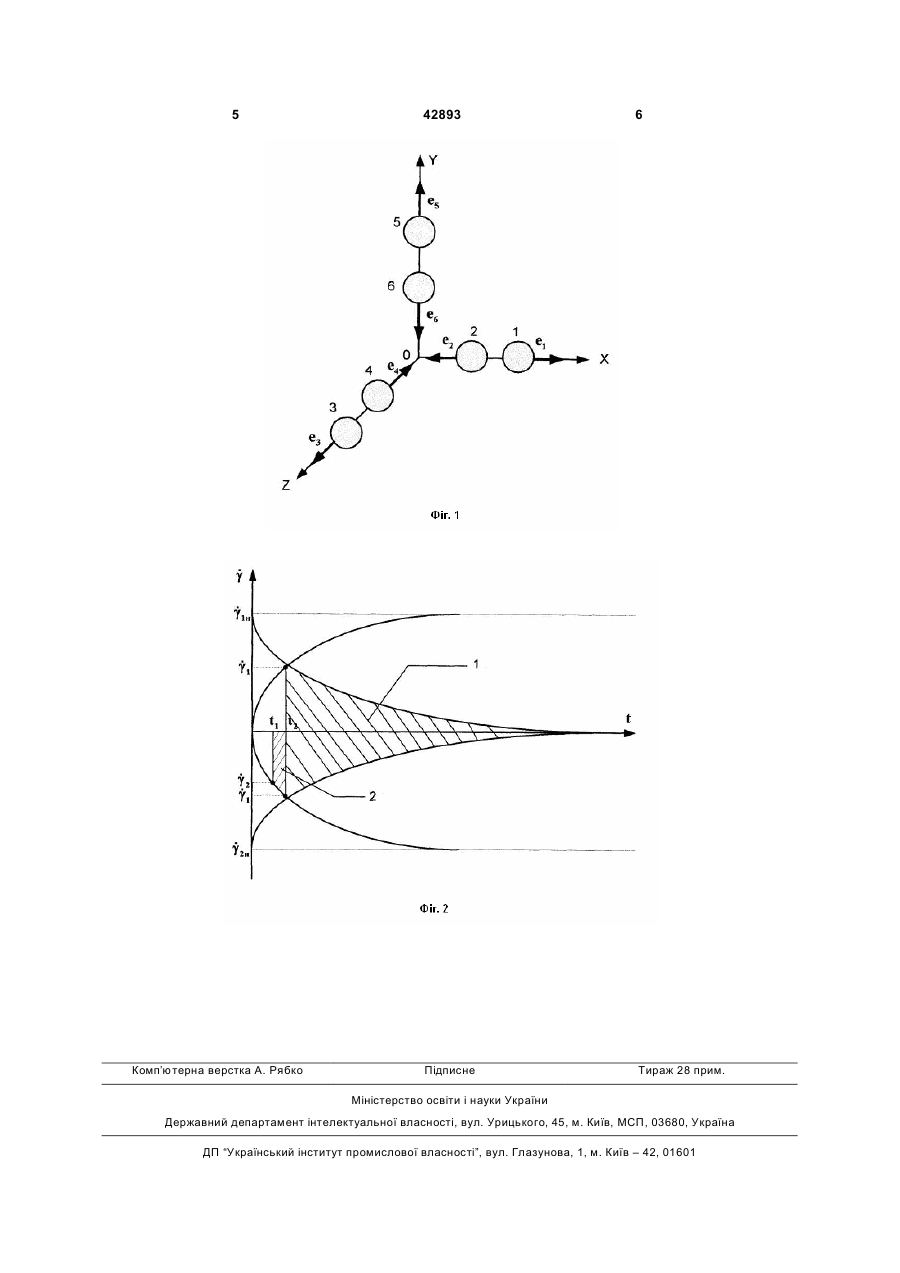
Надлишковий блок двигунів-маховиків, що містить у своєму складі три двигуни-маховики, що встановлені вздовж осей зв'язаної системи координат космічного апарата, який відрізняється тим, що вздовж кожної із осей установлено додатково по одному двигуну-маховику, при цьому кінетичні моменти двох двигунів-маховиків, встановлених на одній осі, мають протилежний напрям. (19) (21) u200901755 (22) 27.02.2009 (24) 27.07.2009 (46) 27.07.2009, Бюл.№ 14, 2009 р. (72) КУЛІК АНАТОЛІЙ СТЕПАНОВИЧ, СУБОТА АНАТОЛІЙ МАКСИМОВИЧ, ФІРСОВ СЕРГІЙ МИКОЛАЙОВИЧ, РЕЗНІКОВА ОЛЬГА ВІКТОРІВНА (73) НАЦІОНАЛЬНИЙ АЕРОКОСМІЧНИЙ УНІВЕРСИТЕТ ІМ. М.Є.ЖУКОВСЬКОГО "ХАРКІВСЬКИЙ АВІАЦІЙНИЙ ІНСТИТУТ" 3 42893 На Фіг.1 зображено схему надлишкового блоку двигунів-маховиків, а на Фіг.2 - перехідні процеси при включенні і виключенні двигунів-маховиків. Надлишковий блок двигунів-маховиків містить шість двигунів-маховиків 1, 2, 3, 4, 5, 6, осі власного обертання яких співпадають з осями зв'язаної системи координат. Орти е1, е2, е3, е4, е5, е6, котрі зв'язані з осями власного обертання двигунівмаховиків, мають напрями, що співпадають з кінетичними моментами однойменних двигунівмаховиків. При цьому напрями кінетичних моментів першого і другого, третього і четвертого, п'ятого і шостого двигунів-маховиків направлені в протилежні сторони відносно однієї з осей зв'язаної системи координат X, Y, Z. Принцип дії запропонованого надлишкового блоку двигунів-маховиків розглянемо з урахуванням динаміки кутового руху космічного апарату: & & Jw + w ´ Jw + H + w ´ H = M + M , упр в де J - матриця інерції системи космічний апарат - маховики; w - вектор абсолютної кутової швидкості обертання космічного апарата; H - вектор кінетичних моментів маховиків; Mупр - управляючі моменти; Mупр + Mв - збурюючи моменти. Далі розглянемо задачу переорієнтації космічного апарату відносно однієї осі, наприклад, осі ОХ. В цьому випадку маємо: & J x w x + JMx && = C x i упрх . g Для переорієнтації космічного апарата маховики, що розташовані на одній осі, одночасно підt æ - 2 & & ç Dw = -lDg = -l( g 1н ç1 - e T ç è 4 ключаються до блоку живлення. Для отримання необхідного кута орієнтації, один маховик відключається від живлення в момент часу t1, а другий в момент t2 (Фіг.2). На Фіг.2 позначено: 1 - область компенсації кінетичних моментів за рахунок однакових характеристик змінення кінетичних моментів двигунів-маховиків при їх вибігу; 2 - область створення моменту управління при включенні одного з маховиків у момент часу t1 і його виключенні у момент часу t2. Як видно з Фіг.2, зміна кутової швидкості космічного апарата при цьому описується наступним рівнянням: J & & & & Dw = w1 - w2 = - Mx (g1 - g 2 ) = -l (g1 - g 2 ) , J де l = JMx ; g 1, g 2 - кутова швидкість обер& & J тання першого та другого маховика відповідно. При цьому, як відомо, розгін маховиків 1 і 2 описується виразами: t t æ æ - 2 ö - 1 ÷ & & & ç & ç g 1 = g1н ç 1 - e T ÷; g 2 = g 2н ç1 - e T ÷ ç ç ø è è В цьому випадку t t æ æ - 2 ö - 1ö ÷ ÷ & ç & & & & ç Dg = g 1 - g 2 = g1н ç1 - e T ÷ - g1н ç1 - e T ÷ . ÷ ÷ ç ç ø ø è è Підставимо останній вираз в рівняння для знаходження зміни кутової швидкості: t t ö æ æ - t1 - 1 ö - 2 ÷ & ç ÷ & ç - g 1н ç1 - e T ÷ ) = -l( g 1н ç e T - e T ÷ ÷ ç ÷ ç ø è ø è Знайдемо кут, на який при цьому відхилиться космічний апарат. Для цього проінтегруємо попередній вираз і отримаємо: t ö æ - t1 t2 - 2 ÷ & ç j = ò Dwdt = - lg1н ç e T t1 - e T t 2 ÷ . ÷ ç 0 ø è Для прикладу виберемо наступні значення коефіцієнтів: l=10-6; g 1н = 25001/ c ; t1=10с; t2=15с; Т=100с. & Знайдемо кут, на який відхилиться космічний апарат: φ=-10-6·2500(0,9·10-0,86·15)=0,975·10-2рад= =0,57° ö ÷. ÷ ÷ ø ö ÷. ÷ ÷ ø Звідки видно, що схема розташування двигунів-маховиків, що запропонована у корисній моделі, дозволяє значно підвищити точність орієнтації космічного апарата. Також при цьому не відбувається постійного розгону двигунів-маховиків для компенсації збурюючого моменту. Тому немає необхідності проводити їх розгрузку, що призводить до меншого енергоспоживання та маси космічного апарату. Окрім того, така схема забезпечує зменшення чутливості системи орієнтації і стабілізації космічного апарату до відмов в блоці за рахунок введення надлишкових двигунів-маховиків. 5 Комп’ютерна верстка А. Рябко 42893 6 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюExcess unit of flywheel motors
Автори англійськоюKulik Anatolii Stepanovych, Subota Anatolii Maksymovych, Firsov Serhii Mykolaiovych, Reznikova Olha Viktorivna
Назва патенту російськоюИзбыточный блок двигателей-маховиков
Автори російськоюКулик Анатолий Степанович, Субота Анатолий Максимович, Фирсов Сергей Николаевич, Резникова Ольга Викторовна
МПК / Мітки
МПК: B64G 1/24
Мітки: надлишковий, блок, двигунів-маховиків
Код посилання
<a href="https://ua.patents.su/3-42893-nadlishkovijj-blok-dviguniv-makhovikiv.html" target="_blank" rel="follow" title="База патентів України">Надлишковий блок двигунів-маховиків</a>
Надлишковий блок двигунів-маховиків
Номер патенту: 35598
Опубліковано: 25.09.2008
Автори: Кулік Анатолій Степанович, Резнікова Ольга Вікторівна, Субота Анатолій Максимович
МПК: B64G 1/24
Мітки: блок, двигунів-маховиків, надлишковий
Формула / Реферат:
Надлишковий блок двигунів-маховиків, що містить у своєму складі чотири двигуни-маховики, який відрізняється тим, що осі власного обертання двигунів-маховиків співпадають з ребрами правильної чотирикутної у основі піраміди, при цьому кінетичні моменти двох двигунів-маховиків, розташованих на діаметрально протилежних ребрах піраміди, мають напрям у бік вершини, а напрям кінетичних моментів інших двох двигунів-маховиків лежить у бік основи...
Функціонально-надлишковий інерціальний вимірювальний блок
Номер патенту: 7058
Опубліковано: 15.06.2005
Автори: Гордін Олександр Григорович, Калашникова Валерія Михайлівна, Шипітько Олена Олександрівна
МПК: G01C 21/00
Мітки: блок, функціонально-надлишковий, вимірювальний, інерціальній
Формула / Реферат:
1. Функціонально-надлишковий інерціальний вимірювальний блок, що включає чотири одноступеневих вимірювачі довільно спрямованого векторного параметра, осі чутливості яких представляють вимірювальний базис, розташовані по твірних конуса, мають спільний початок на осі конуса, який відрізняється тим, що в нього введена система обробки інформації, яка включає чотири обчислювальних пристрої, що споживають інформацію вимірювачів, вхід першого з...
Блок відмовостійких сервоприводів для каналу тангажа
Номер патенту: 36467
Опубліковано: 27.10.2008
Автор: Кулік Анатолій Степанович
МПК: G05D 1/08
Мітки: сервоприводів, каналу, відмовостійких, блок, тангажа
Формула / Реферат:
Блок відмовостійких сервоприводів для каналу тангажа, що містить двигун-маховик, керуючий вхід, групу інформаційних виходів, який відрізняється тим, що містить другий двигун-маховик, другий керуючий вхід, два аналого-цифрових перетворювачі, генератор видів відмов, два імітатори видів відмов, блок діагностування видів відмов, блок відновлення працездатності, дві шини керування, причому виходи давачів першого двигуна-маховика з'єднані з входами...
Спосіб розвантаження системи силових гіроскопів космічного апарата
Номер патенту: 62147
Опубліковано: 15.12.2003
Автори: Успенський Валерій Борисович, Кузнєцов Юрій Олексійович, Бандура Іван Миколайович, Голоскоков Євген Григорович
МПК: B64G 1/24
Мітки: спосіб, системі, космічного, гіроскопів, апарата, силових, розвантаження
Формула / Реферат:
Спосіб розвантаження системи силових гіроскопів космічного апарата, який полягає в тому, що вимірюють вектор нагромадженого кінетичного моменту системи силових гіроскопів, вимірюють вектор абсолютної кутової швидкості космічного апарата, визначають сумарний вектор кінетичного моменту космічного апарата, виконують розвантаження за допомогою реактивних двигунів орієнтації, який відрізняється тим, що фіксують момент досягнення допустимого...
Застосування пасивного автобалансира як демпфера кута нутації сплюснутого обертового космічного апарата
Номер патенту: 28407
Опубліковано: 10.12.2007
Автори: Філімоніхін Геннадій Борисович, Філімоніхіна Ірина Іванівна
МПК: B64G 1/00
Мітки: обертового, пасивного, сплюснутого, апарата, застосування, нутації, автобалансира, демпфера, кута, космічного
Формула / Реферат:
1. Застосування пасивного автобалансира як демпфера кута нутації сплюснутого обертового космічного апарата.2. Застосування за п. 1, яке відрізняється тим, що космічний апарат статично незрівноважений, відстань від центра мас космічного апарата до площини корекції не перевищуєде: b - відстань від центра мас космічного апарата до площини...
Попередній патент: Спосіб приготування желейного мармеладу
Наступний патент: Пристрій для камерофонів при фотографуванні детальних та мікрооб’єктів
Випадковий патент: Спосіб підготовки плодів до зберігання