Автомат пакування сипких продуктів у готові пакети
Номер патенту: 43299
Опубліковано: 10.08.2009
Автори: Гаврильченко Олександр Віталійович, Боровець Володимир Михайлович, Яхимович Сергій Володимирович, Шенбор Владислав Станіславович, Мельничук Ігор Михайлович, Боровець Ірина Степанівна
Формула / Реферат
Автомат пакування сипких продуктів у готові пакети, що містить послідовно встановлені механізм повороту з вакуумними захоплювачами, дозатор сипкого продукту, механізми перенесення пакетів у межах технологічних позицій у вигляді транспортуючих кареток зворотно-поступальної дії та пристрій маркування, який відрізняється тим, що він додатково містить механізм повороту пакета на 180° та механізм його відкривання, оснащений вакуумними захоплювачами, встановлені на позиції заповнення пакета сипким продуктом, а також механізм термічного зварювання.
Текст
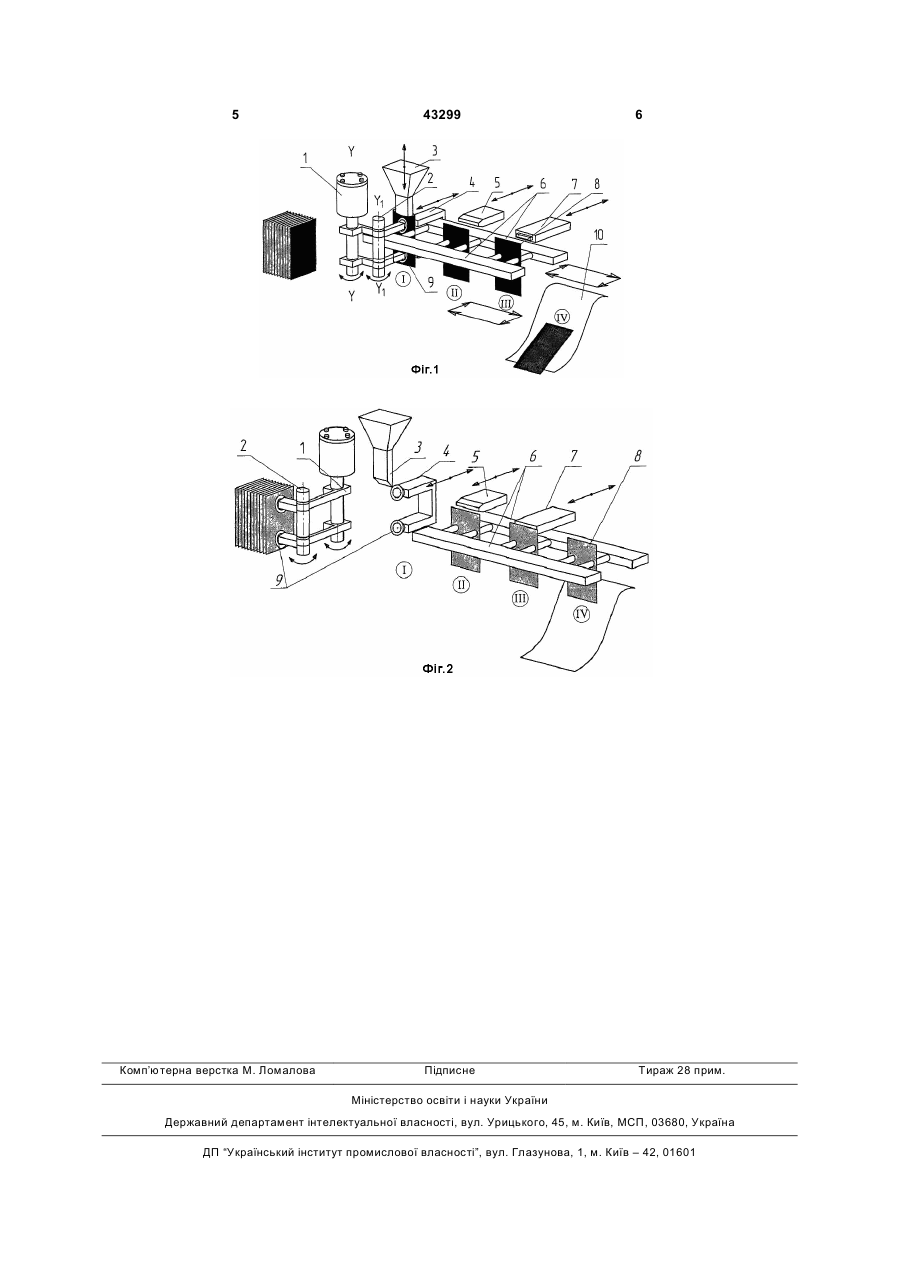
Автомат пакування сипких продуктів у готові пакети, що містить послідовно встановлені механізм повороту з вакуумними захоплювачами, дозатор сипкого продукту, механізми перенесення пакетів у межах технологічних позицій у вигляді транспортуючих кареток зворотно-поступальної дії та пристрій маркування, який відрізняється тим, що він додатково містить механізм повороту пакета на 180° та механізм його відкривання, оснащений вакуумними захоплювачами, встановлені на позиції заповнення пакета сипким продуктом, а також механізм термічного зварювання. (19) (21) u200902657 (22) 23.03.2009 (24) 10.08.2009 (46) 10.08.2009, Бюл.№ 15, 2009 р. (72) БОРОВЕЦЬ ВОЛОДИМИР МИХАЙЛОВИЧ, ЯХИМОВИЧ СЕРГІЙ ВОЛОДИМИРОВИЧ, ГАВРИЛЬЧЕНКО ОЛЕКСАНДР ВІТАЛІЙОВИЧ, МЕЛЬНИЧУК ІГОР МИХАЙЛОВИЧ, БОРОВЕЦЬ ІРИНА СТЕПАНІВНА, ШЕНБОР ВЛАДИСЛАВ СТАНІСЛАВОВИЧ (73) НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ "ЛЬВІВСЬКА ПОЛІТЕХНІКА" 3 продуктом, 4 - механізм відкривання пакета, 5 механізм термічного зварювання, 6 - транспортуючі каретки механізму перенесення пакетів, 7 - пристрій маркування, 8 - пакет, 9 - вакуумні захоплювачі, 10 - відвідний лоток. Автомат пакування сипких продуктів у готові пакети складається з послідовно встановлених поворотних механізмів 1 і 2 з вакуумними захоплювачами 9 які мають можливість повороту навколо вертикальних осей Y-Y та Y1-Y1, дозатора заповнення пакета сипким продуктом 3, механізму відкривання пакета 4, механізмів захоплення та перенесення пакетів у вигляді транспортуючих кареток 6 зворотно-поступальної дії, механізму термічного заварювання 5 та механізму маркування 7. Поворотні механізми 1 і 2 з вакуумними захоплювачами 9 призначені для захоплення готового пакета із магазину, його перенесення до механізму відкривання 4, з одночасним поворотом навколо вертикальної осі і утримування пакета для його заповнення сипким продуктом за допомогою дозатора 3. Захоплення та перенесення пакетів у межах технологічних позицій здійснюється за допомогою транспортуючих кареток 6. Для закривання пакета передбачений механізм термічного зварювання 5. Маркування здійснює механізм 7. Для відведення готових пакетів встановлений лоток 10. В автоматі пакування сипких продуктів у готові пакети послідовно виконуються наступні операції: І - захоплення пакета та його переміщення на позицію заповнення сипким продуктом, розкривання пакета і процес заповнення продуктом, II - термічне зварювання верхнього краю пакета, III - маркування пакета, IV - відведення готового пакета. Запропонований автомат пакування сипких продуктів у готові пакети відноситься до багатопозиційних перервно-поточних пакувальних машин з циклічними механізмами, де пакети періодично переміщуються з позиції на позицію, а під час їх зупинок в даних позиціях здійснюються відповідні технологічні операції. Принцип дії автомата пакування сипких продуктів у готові пакети полягає в наступному: вакуумними захоплювачами 9 поворотних механізмів 1, 2 (Фіг.2) порожній пакет з касети переноситься на позицію заповнення сипким продуктом (поз. І), де пакет захоплюється вакуумними захватами 9 механізму відкривання 4 із наступним переміщенням механізму від пакету та частковим зворотнім переміщенням поворотного механізму 1 відносно осі Y-Y. Ці переміщення дозволяють забезпечити відкривання пакету на позиції завантаження і його утримування за допомогою вакуумних захоплювачів. Після цього в пакет заходить лійка дозатора заповнення пакета сип 43299 4 ким продуктом 3, через яку засипається потрібна кількість продукту. Вакуумні захоплювачі поворотного механізму 1 і механізму відкривання 4 повертаються назустріч один одному забезпечуючи закривання пакета. Коли пакет затискається групою пружних упорів транспортуючих кареток 6, що знаходяться в крайньому лівому положенні, відключається вакуум у захоплювачах 9. Утримуючи пакет, транспортуючі каретки 6 переміщуються у крайнє праве положення, одночасно переносячи заповнений пакет на позицію термічного зварювання верхнього краю пакета (поз. II), а вакуумні захоплювачі поворотних механізмів 1 та 2 повертаються за наступним порожнім пакетом. На цій позиції пакет затискається між пружним нерухомим упором і механізмом термічного зварювання 5, температура нагрівання якого контролюється і встановлюється за допомогою мікроконтролера. Транспортуючі каретки 6 розходяться, відпускають пакет і повертаються в попереднє (крайнє ліве) положення, де перша група пружних упорів транспортуючої каретки 6 захоплює новий заповнений пакет, а друга група - пакет, який знаходиться на позиції зварювання.Механізм термічного зварювання 5 повертається у вихідне положення, вакуумні захоплювачі поворотних механізмів 1, 2 та відкривання 4 відключаються і транспортуючі каретки 6 переміщуються в праве положення. Новий заповнений пакет попадає на позицію зварювання, а закритий пакет переміщується на третю позицію маркування (поз. III). У наступному циклі готовий пакет 8 виноситься на четверту позицію (поз. IV), що знаходиться за робочою зоною автомата і опиняється над відвідним лотком 10. Перед поверненням у ліве положення, транспортуючі каретки 6 розходяться і пакет падає на відвідний лоток 10, по якому він переміщується в готову тару або на робочий стіл для подальшого групового пакування. Контроль виконання технологічних операцій здійснюється оптичними давачами. Зокрема, у випадку відсутності пакета на позиції завантаження вакуумні захоплювачі поворотних механізмів 1, 2 та відкривання 4 відключаються достроково, а також блокується заслінка відкривання дозатора заповнення пакета сипким продуктом 3 (поз. І). Остання позиція (поз. IV) оснащена давачем рахування готової продукції. Таким чином, усі пакети з касети один за одним послідовно проходять технологічні операції заповнення (поз. І), зварювання (поз. II), маркування (поз. III), відведення готової продукції (поз. IV). 5 Комп’ютерна верстка М. Ломалова 43299 6 Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomatic packing machine of friable products into finished packets
Автори англійськоюBorovets Volodymyr Mykhailovych, Yakhymovych Serhii Volodymyrovych, Havrylchenko Oleksandr Vitaliiovych, Melnychuk Ihor Mykhailovych, Borovets Iryna Stepanivna, Shenbor Vladyslav Stanislavovych
Назва патенту російськоюАвтомат упаковки сыпучих продуктов в готовые пакеты
Автори російськоюБоровец Владимир Михайлович, Яхимович Сергей Владимирович, Гаврильченко Александр Витальевич, Мельничук Игорь Михайлович, Боровец Ирина Степановна, Шенбор Владислав Станиславович
МПК / Мітки
МПК: B65B 1/00
Мітки: сипких, автомат, продуктів, пакети, готові, пакування
Код посилання
<a href="https://ua.patents.su/3-43299-avtomat-pakuvannya-sipkikh-produktiv-u-gotovi-paketi.html" target="_blank" rel="follow" title="База патентів України">Автомат пакування сипких продуктів у готові пакети</a>
Автомат пакування сипких продуктів у готові пакети
Номер патенту: 34324
Опубліковано: 11.08.2008
Автори: Гаврильченко Олександр Віталійович, Яхимович Сергій Володимирович, Гурський Володимир Миколайович, Мельничук Ігор Михайлович, Боровець Володимир Михайлович
МПК: B65B 9/06
Мітки: пакети, готові, автомат, пакування, продуктів, сипких
Формула / Реферат:
Автомат пакування сипких продуктів у готові пакети, що містить послідовно встановлені дозатор заповнення пакета сипким продуктом, механізми захоплення та перенесення пакетів у межах технологічних позицій, заклеювання і маркування, який відрізняється тим, що додатково містить поворотний механізм із вакуумними захоплювачами, встановлений перед дозатором заповнення пакета сипким продуктом, а механізм захоплення та перенесення пакетів виконаний у...
Автомат для пакування сипких продуктів
Номер патенту: 38477
Опубліковано: 12.01.2009
Автори: Гурський Володимир Миколайович, Боровець Володимир Михайлович, Наконечний Сергій Йосипович, Гаврильченко Олександр Віталійович
МПК: B65B 9/00
Мітки: автомат, пакування, продуктів, сипких
Формула / Реферат:
Автомат для пакування сипких продуктів, що містить встановлені на станині рулонотримач, дозатор, з'єднаний через конічний бункер і циліндричну лійку пристрою подачі продукту з тубусом із пристроями для формування рукава, зварювання повздовжнього та поперечних швів і протягування рукава, який відрізняється тим, що конічний бункер і циліндрична лійка спряжені з ексцентриситетом, а на внутрішній поверхні конічного бункера виконані повздовжні...
Листовий матеріал для виготовлення пакетів для харчових продуктів та пакети, виготовлені з такого матеріалу
Номер патенту: 77016
Опубліковано: 16.10.2006
Автори: Скарабеллі Паоло, Норенстам Рікард, Галавотті Джорджіо, Такконі Лоренцо
МПК: B65B 41/00
Мітки: виготовлені, продуктів, матеріал, пакети, такого, листовий, матеріалу, харчових, пакетів, виготовлення
Формула / Реферат:
1. Листовий матеріал (2) для виготовлення пакетів для харчових продуктів, який містить множину ліній загину (4) і принаймні одну позначку суміщення (18), котра піддається виявленню оптичними засобами, який відрізняється тим, що згадана позначка суміщення (18) складається з принаймні двох паралельних відрізків прямої (37а, 37b), які перпендикулярні до напряму подавання згаданого матеріалу (2), і похилого відрізка (37с), розміщеного між...
Пристрій для пакування харчових продуктів
Номер патенту: 21137
Опубліковано: 15.02.2007
Автор: Сорокін Андрій Віталійович
МПК: B65D 30/22, A23B 9/00, A23L 1/00
Мітки: харчових, пакування, пристрій, продуктів
Формула / Реферат:
1. Пристрій для пакування харчових продуктів, який складається з упаковки з харчовим продуктом, який відрізняється тим, що додатково містить не менше однієї упаковки з приправою, яка прикріплена ззовні упаковки з харчовим продуктом.2. Пристрій за п. 1, який відрізняється тим, що упаковка з приправою прикріплена і розміщена усередині упаковки з харчовим продуктом.3. Пристрій за п. 1 і п. 2, який відрізняється тим, що упаковка з...
Пристрій для упаковування продуктів у пакети з термосклейного матеріалу
Номер патенту: 61710
Опубліковано: 15.02.2006
Автори: Голованов Сергій Віталійович, Мироненко Віталій Олексійович
МПК: B65B 9/06
Мітки: пакети, продуктів, пристрій, матеріалу, термосклейного, упаковування
Формула / Реферат:
Корисна модель належить до області газового аналізу, а конкретніше до термокондуктометричних газоаналізаторів, що призначені для виміру компонентів бінарних і псевдо бінарних газових сумішей.Відомо про автоматичний датчик газоаналізатора ТП1126, призначений для визначення вмісту водню в повітрі, виробництва Вируського заводу газоаналізаторів (Естонія), який є аналогом пристрою, що заявляється.Основним вузлом датчика - аналога є...
Попередній патент: Чотиривалкова прокатна кліть з віялоподібним розташуванням валків
Випадковий патент: Інструментальна оправка для оброблення глибоких отворів