Механізм приводу платформ
Номер патенту: 44817
Опубліковано: 12.10.2009
Автори: Пісцов Борис Олексійович, Амбарцумянц Роберт Вачаганович, Карабельників Михайло Олександрович, Айрапетян Артем Грачевич, Аванес'янц Азат Георгійович
Формула / Реферат
1. Механізм приводу платформ, що містить корпус, платформи, важелі, шарнірні з'єднання, гідроприводи, який відрізняється тим, що верхня платформа і корпус виконані Г-подібними і сполучені між собою шарнірно попарно двома важелями по ширині платформи і корпусу, Г-подібна платформа забезпечена фіксатором, а важелі клямкою, на корпусі жорстко закріплені дві паралельні напрямні, в яких поміщені ролики, пов'язані з нижньою плоскою платформою, Г-подібна і плоска платформи забезпечені скосами в площині, перпендикулярній площині руху платформи.
2. Механізм приводу платформ за п. 1, який відрізняється тим, що між важелями, шарнірно сполученими з верхньою частиною Г-подібної платформи, і корпусом, встановлені гідроциліндри двобічної дії, шарнірно пов'язані з важелями і корпусом.
3. Механізм приводу платформ за п. 2, який відрізняється тим, що нижня плоска платформа шарнірно сполучена з штоком телескопічного гідроциліндра, а Г-подібний корпус шарнірно з'єднаний з циліндром телескопічного циліндра.
Текст
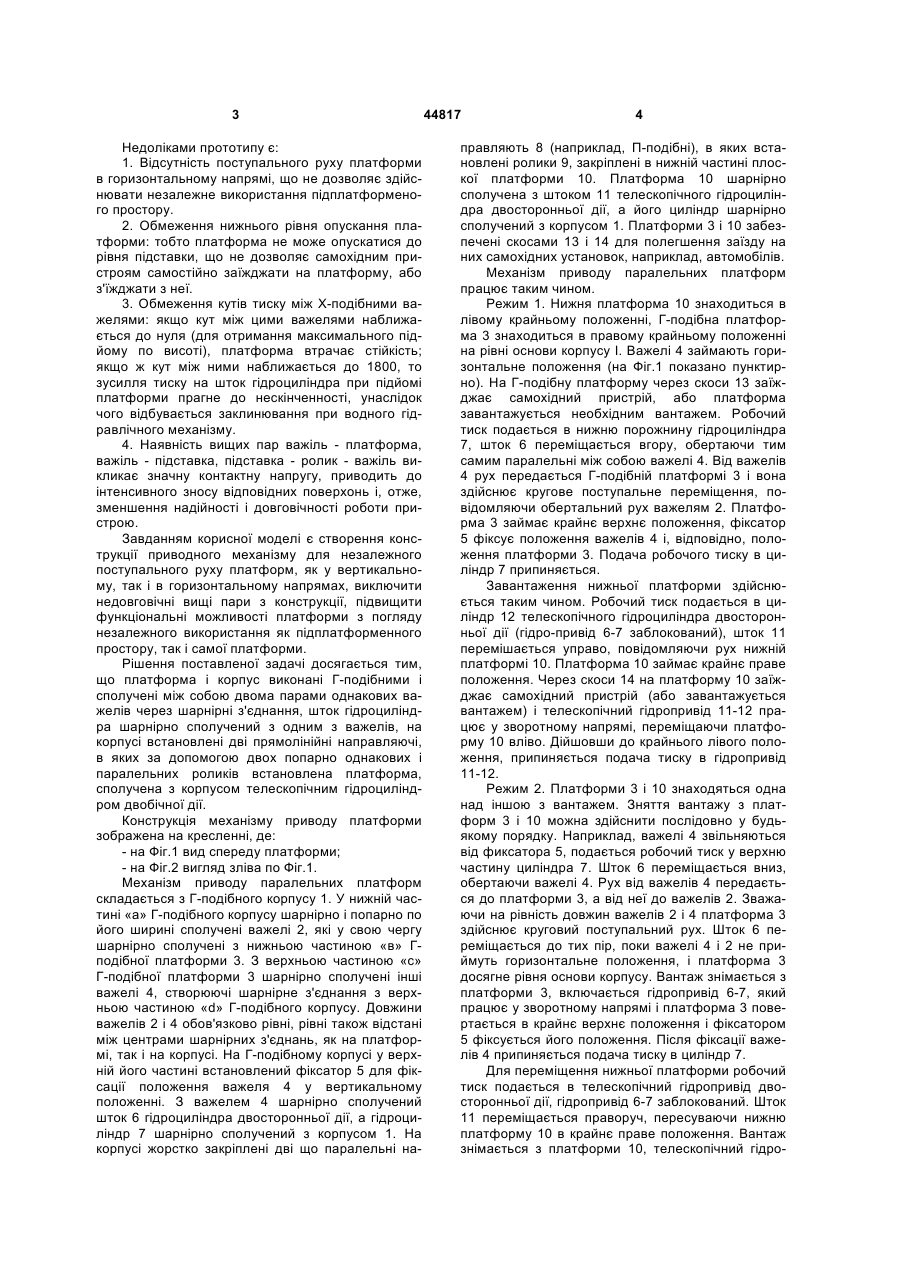
1. Механізм приводу платформ, що містить корпус, платформи, важелі, шарнірні з'єднання, гідроприводи, який відрізняється тим, що верхня платформа і корпус виконані Г-подібними і сполучені між собою шарнірно попарно двома важелями 3 Недоліками прототипу є: 1. Відсутність поступального руху платформи в горизонтальному напрямі, що не дозволяє здійснювати незалежне використання підплатформеного простору. 2. Обмеження нижнього рівня опускання платформи: тобто платформа не може опускатися до рівня підставки, що не дозволяє самохідним пристроям самостійно заїжджати на платформу, або з'їжджати з неї. 3. Обмеження кутів тиску між Х-подібними важелями: якщо кут між цими важелями наближається до нуля (для отримання максимального підйому по висоті), платформа втрачає стійкість; якщо ж кут між ними наближається до 1800, то зусилля тиску на шток гідроциліндра при підйомі платформи прагне до нескінченності, унаслідок чого відбувається заклинювання при водного гідравлічного механізму. 4. Наявність вищих пар важіль - платформа, важіль - підставка, підставка - ролик - важіль викликає значну контактну напругу, приводить до інтенсивного зносу відповідних поверхонь і, отже, зменшення надійності і довговічності роботи пристрою. Завданням корисної моделі є створення конструкції приводного механізму для незалежного поступального руху платформ, як у вертикальному, так і в горизонтальному напрямах, виключити недовговічні вищі пари з конструкції, підвищити функціональні можливості платформи з погляду незалежного використання як підплатформенного простору, так і самої платформи. Рішення поставленої задачі досягається тим, що платформа і корпус виконані Г-подібними і сполучені між собою двома парами однакових важелів через шарнірні з'єднання, шток гідроциліндра шарнірно сполучений з одним з важелів, на корпусі встановлені дві прямолінійні направляючі, в яких за допомогою двох попарно однакових і паралельних роликів встановлена платформа, сполучена з корпусом телескопічним гідроциліндром двобічної дії. Конструкція механізму приводу платформи зображена на кресленні, де: - на Фіг.1 вид спереду платформи; - на Фіг.2 вигляд зліва по Фіг.1. Механізм приводу паралельних платформ складається з Г-подібного корпусу 1. У нижній частині «а» Г-подібного корпусу шарнірно і попарно по його ширині сполучені важелі 2, які у свою чергу шарнірно сполучені з нижньою частиною «в» Гподібної платформи 3. З верхньою частиною «с» Г-подібної платформи 3 шарнірно сполучені інші важелі 4, створюючі шарнірне з'єднання з верхньою частиною «d» Г-подібного корпусу. Довжини важелів 2 і 4 обов'язково рівні, рівні також відстані між центрами шарнірних з'єднань, як на платформі, так і на корпусі. На Г-подібному корпусі у верхній його частині встановлений фіксатор 5 для фіксації положення важеля 4 у вертикальному положенні. З важелем 4 шарнірно сполучений шток 6 гідроциліндра двосторонньої дії, а гідроциліндр 7 шарнірно сполучений з корпусом 1. На корпусі жорстко закріплені дві що паралельні на 44817 4 правляють 8 (наприклад, П-подібні), в яких встановлені ролики 9, закріплені в нижній частині плоскої платформи 10. Платформа 10 шарнірно сполучена з штоком 11 телескопічного гідроциліндра двосторонньої дії, а його циліндр шарнірно сполучений з корпусом 1. Платформи 3 і 10 забезпечені скосами 13 і 14 для полегшення заїзду на них самохідних установок, наприклад, автомобілів. Механізм приводу паралельних платформ працює таким чином. Режим 1. Нижня платформа 10 знаходиться в лівому крайньому положенні, Г-подібна платформа 3 знаходиться в правому крайньому положенні на рівні основи корпусу І. Важелі 4 займають горизонтальне положення (на Фіг.1 показано пунктирно). На Г-подібну платформу через скоси 13 заїжджає самохідний пристрій, або платформа завантажується необхідним вантажем. Робочий тиск подається в нижню порожнину гідроциліндра 7, шток 6 переміщається вгору, обертаючи тим самим паралельні між собою важелі 4. Від важелів 4 рух передається Г-подібній платформі 3 і вона здійснює кругове поступальне переміщення, повідомляючи обертальний рух важелям 2. Платформа 3 займає крайнє верхнє положення, фіксатор 5 фіксує положення важелів 4 і, відповідно, положення платформи 3. Подача робочого тиску в циліндр 7 припиняється. Завантаження нижньої платформи здійснюється таким чином. Робочий тиск подається в циліндр 12 телескопічного гідроциліндра двосторонньої дії (гідро-привід 6-7 заблокований), шток 11 перемішається управо, повідомляючи рух нижній платформі 10. Платформа 10 займає крайнє праве положення. Через скоси 14 на платформу 10 заїжджає самохідний пристрій (або завантажується вантажем) і телескопічний гідропривід 11-12 працює у зворотному напрямі, переміщаючи платформу 10 вліво. Дійшовши до крайнього лівого положення, припиняється подача тиску в гідропривід 11-12. Режим 2. Платформи 3 і 10 знаходяться одна над іншою з вантажем. Зняття вантажу з платформ 3 і 10 можна здійснити послідовно у будьякому порядку. Наприклад, важелі 4 звільняються від фиксатора 5, подається робочий тиск у верхню частину циліндра 7. Шток 6 переміщається вниз, обертаючи важелі 4. Рух від важелів 4 передається до платформи 3, а від неї до важелів 2. Зважаючи на рівність довжин важелів 2 і 4 платформа 3 здійснює круговий поступальний рух. Шток 6 переміщається до тих пір, поки важелі 4 і 2 не приймуть горизонтальне положення, і платформа 3 досягне рівня основи корпусу. Вантаж знімається з платформи 3, включається гідропривід 6-7, який працює у зворотному напрямі і платформа 3 повертається в крайнє верхнє положення і фіксатором 5 фіксується його положення. Після фіксації важелів 4 припиняється подача тиску в циліндр 7. Для переміщення нижньої платформи робочий тиск подається в телескопічний гідропривід двосторонньої дії, гідропривід 6-7 заблокований. Шток 11 переміщається праворуч, пересуваючи нижню платформу 10 в крайнє праве положення. Вантаж знімається з платформи 10, телескопічний гідро 5 44817 привід працює у зворотному напрямі, платформа 10 повертається в ліве крайнє положення і робота телескопічного гідроприводу припиняється. Таке конструктивне рішення механізму приводу переміщення платформ дозволяє: 1. Здійснити круговий поступальний рух верхньої платформи, забезпечуючи можливість збереження і знаходження вантажу на нижній платформі; 2. Ефективно і незалежно використовувати підплатформенне і надплатформенне простори для розміщення вантажів; Комп’ютерна верстка Л. Купенко 6 3. Виключити з конструкції вищі пари і тим самим підвищити надійність і довговічність роботи пристрою; 4. Поліпшити умови роботи гідроприводів за рахунок виключення мертвих положень ланок механізму. 5. Значно понизити навантаження на всі вузли і елементи приводу, тим самим зменшити габарити масу пристрою. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюActuator of platforms
Автори англійськоюAmbartsumiants Robert Vachahanovych, Airapetian Artem Hrachevych, Avanesiants Azat Heorhiiovych, Karabelnykiv Mykhailo Oleksandrovych, Pistsov Borys Oleksiiovych
Назва патенту російськоюМеханизм привода платформ
Автори російськоюАмбарцумянц Роберт Вачаганович, Айрапетян Артем Грачевич, Аванесьянц Азат Георгиевич, Карабельников Михаил Александрович, Писцов Борис Алексеевич
МПК / Мітки
МПК: B66F 11/00
Мітки: платформ, механізм, приводу
Код посилання
<a href="https://ua.patents.su/3-44817-mekhanizm-privodu-platform.html" target="_blank" rel="follow" title="База патентів України">Механізм приводу платформ</a>
Планетарний механізм приводу ножа
Номер патенту: 1090
Опубліковано: 15.11.2001
Автори: Сичев Сергій Дмитрович, Шошура Юрій Сергійович, Скоромний Леонід Михайлович
МПК: A01D 34/02
Мітки: планетарний, ножа, приводу, механізм
Формула / Реферат:
Планетарний механізм приводу ножа, що містить шарнірно встановлене в корпусі водило і зубчасту передачу , в якій розташована по осі корпусу центральна шестерня, забезпечена по відношенню до сателіта вдвічі більшою кількістю внутрішніх зубів, а сам сателіт закріплений на ексцентриковому валу, який, в свою чергу, шарнірно встановлений на водилі, причому планетарний механізм забезпечений кривошипом , радіус якого дорівнює радіусу сателіта, який...
Гідравлічний пристрій вертикального переміщення приводу конвеєра
Номер патенту: 83518
Опубліковано: 25.07.2008
Автори: Бабенко Микола Павлович, Висоцький Генадій Васильович, Леусенко Анатолій Васильович, Поволоцький Володимир Миколайович, Бережной Роман Анатолійович, Ковальчук Олександр Миколайович
МПК: B65G 19/00, E21F 13/00
Мітки: пристрій, конвеєра, гідравлічний, переміщення, приводу, вертикального
Формула / Реферат:
1. Гідравлічний пристрій вертикального переміщення приводу конвеєра, що містить установлені між рамою приводу і привалковою площиною редуктора вертикальні гідростійки, що опираються на уздовж коробчатої форми лижі з можливістю фіксації висоти підйому приводу, який відрізняється тим, що усередині короба лижі уздовж її повздовжньої осі встановлені гідроциліндри, одним кінцем шарнірно закріплені з установленими на лижі напрямними, а іншим -...
Механізм маневрування безкільового літального апарата
Номер патенту: 16022
Опубліковано: 17.07.2006
Автор: Цюренко Валентин Андрійович
МПК: B64C 39/02, B64C 29/00
Мітки: літального, механізм, маневрування, безкільового, апарата
Формула / Реферат:
Механізм маневрування безкільового літального апарата, який характеризується тим, що в своїй побудові має дві рухомі платформи, які мають між собою шліцьове зчеплення, причому до першої платформи циліндричної форми ззовні жорстко прикріплений двигун, а зсередини чотири паралельні штоки з'єднані з платформою шарнірно, на зовнішній бічній поверхні платформи знаходяться шліци, а до другої платформи зсередини по центру жорстко прикріплений шток,...
Механізм паралельного позиціонування, зокрема, для обробки або маніпулювання або вимірювання
Номер патенту: 81898
Опубліковано: 25.02.2008
Автори: Сіка Збінек, Петру Франтішек, Баума Вацлав, Вампола Томас, Валасек Міхаель
МПК: B23Q 1/25, F16H 21/44
Мітки: обробки, зокрема, маніпулювання, паралельного, механізм, вимірювання, позиціонування
Формула / Реферат:
1. Механізм паралельного позиціонування, зокрема, для обробки або маніпулювання, або вимірювання, що складається з платформи (3) для транспортування і/або маніпулювання, наприклад, інструментом або заготовкою, або вимірювальним пристроєм, з'єднаної зі станиною (2) верстата щонайменше одним позиціонуючим важелем (6) і шарнірно з'єднаної з щонайменше двома напрямними (4) ковзання за допомогою щонайменше трьох шарнірів (11), що обертаються, при...
Механізм приводу різального апарата жатки
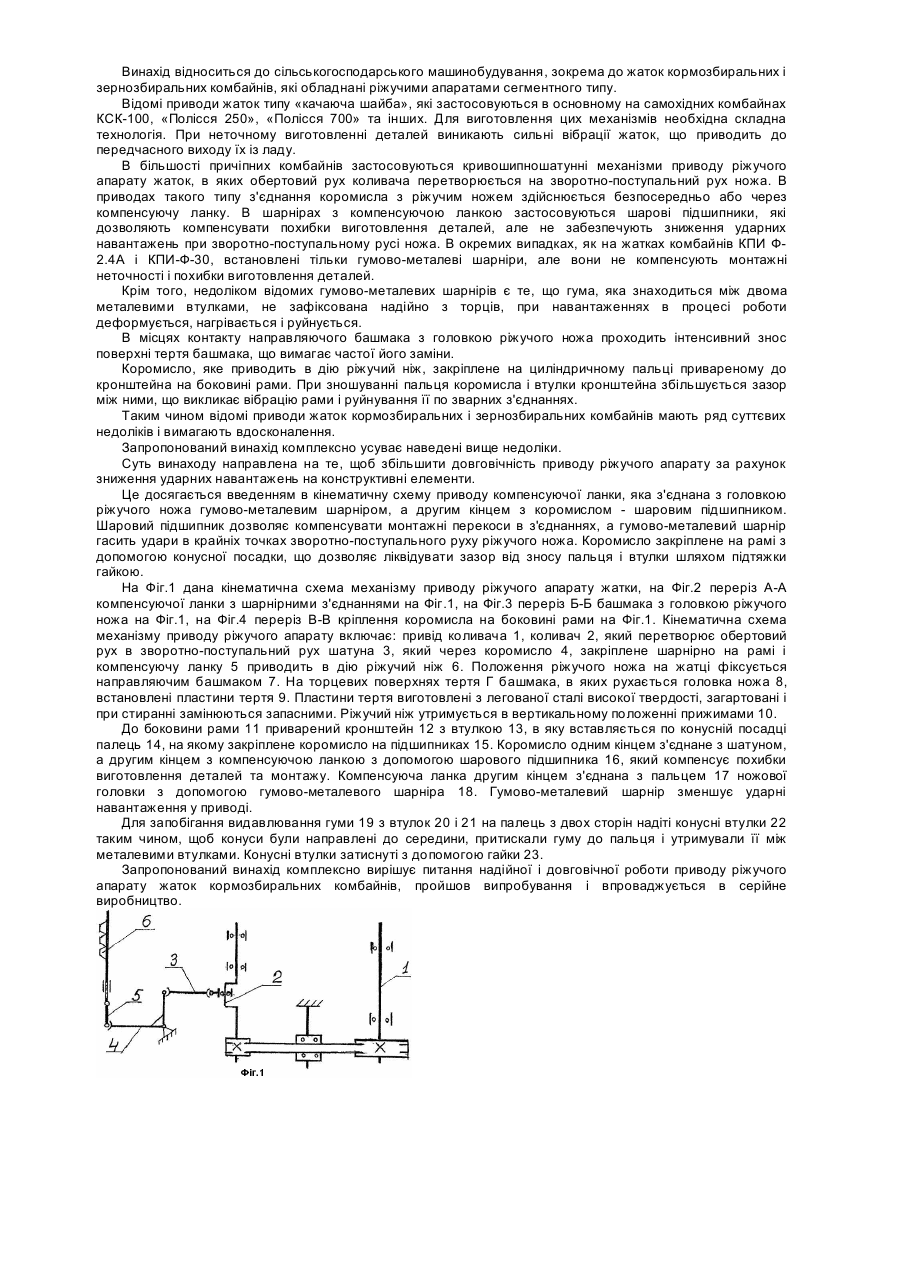
Номер патенту: 72044
Опубліковано: 17.01.2005
Автори: Синякевич Володимир Макарович, Українець Валентин Володимирович, Кравчук Валерій Олександрович, Олійник Петро Іванович
МПК: A01D 34/02
Мітки: апарата, жатки, механізм, різального, приводу
Формула / Реферат:
1. Механізм приводу різального апарата жатки, який містить привід коливача, коливач, шатун, коромисло, компенсуючу ланку, ніж різальний, направляючий башмак, який відрізняється тим, що в корпус компенсуючої ланки запресований кульовий підшипник, який внутрішнім діаметром посаджений на палець коромисла, а на другому кінці корпусу встановлений гумовометалевий шарнір, з'єднаний з пальцем головки різального ножа.2. Механізм приводу...