Прямолінійно направляючий механізм
Номер патенту: 52956
Опубліковано: 15.01.2003
Автори: Піліпець Денис Анатолійович, Ахтямов Альберт Мінахметович

Формула / Реферат
1. Прямолінійно направляючий механізм, який містить стойку, кривошип та коромисло, з'єднані шарнірно із стойкою, шатун, виконаний у вигляді V-подібного симетричного важеля, плечі якого утворені двома однаковими за довжиною із коромислом стержнями, що розташовані під кутом один до одного, і взаємозв'язані шарнірно вершиною із коромислом, а кінцями - із кривошипом та повзуном, що установлений рухомо у прямолінійних напрямних із поздовжньою віссю, розташованою під кутом 45![]() до лінії центрів шарнірів підвіски кривошипа та коромисла до стойки, причому кут між стержнями шатуна та співвідношення довжини коромисла, радіуса кривошипа, ходу повзуна, міжцентрової відстані шарнірів підвіски кривошипа та коромисла до стойки і відстані між поздовжньою віссю переміщення повзуна та центром шарніра кривошип - стойка мають визначені, розрахункові числові значення, який відрізняється тим, що рухоме з'єднання шатуна із повзуном виконано у вигляді жорстко закріпленої на шатуні втулки, що взаємодіє із жорстко закріпленим у повзуні стержнем через проміжну "плаваючу" ексцентрикову втулку, установлену на стержні.
до лінії центрів шарнірів підвіски кривошипа та коромисла до стойки, причому кут між стержнями шатуна та співвідношення довжини коромисла, радіуса кривошипа, ходу повзуна, міжцентрової відстані шарнірів підвіски кривошипа та коромисла до стойки і відстані між поздовжньою віссю переміщення повзуна та центром шарніра кривошип - стойка мають визначені, розрахункові числові значення, який відрізняється тим, що рухоме з'єднання шатуна із повзуном виконано у вигляді жорстко закріпленої на шатуні втулки, що взаємодіє із жорстко закріпленим у повзуні стержнем через проміжну "плаваючу" ексцентрикову втулку, установлену на стержні.
2. Пристрій за п. 1, який відрізняється тим, що поверхня стержня, закріпленого у повзуні, в поздовжньому перерізі має форму овала.
Текст
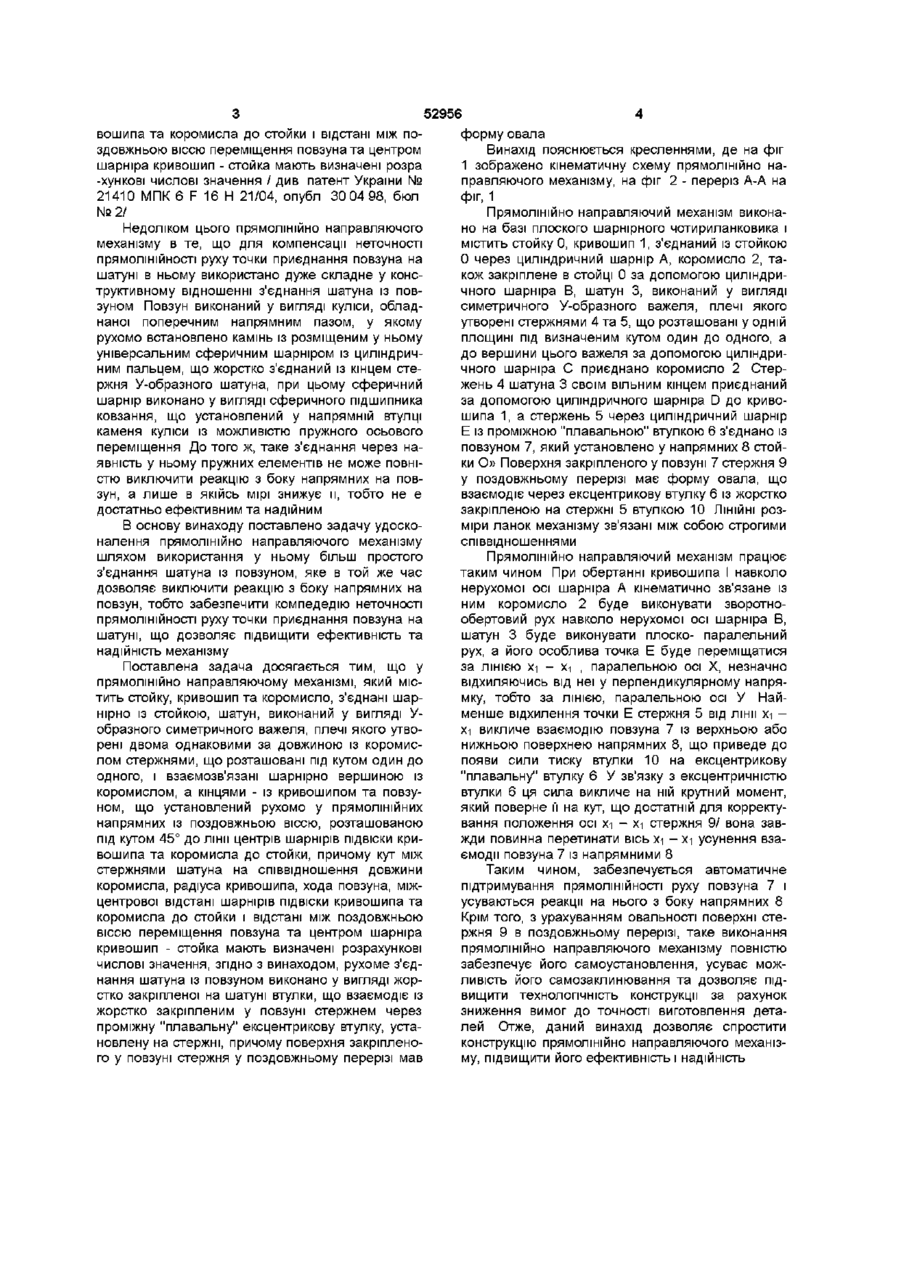
1 Прямолінійно направляючий механізм, який містить стойку, кривошип та коромисло, з'єднані шарнірно із стойкою, шатун, виконаний у вигляді V-подібного симетричного важеля, плечі якого утворені двома однаковими за довжиною із коромислом стержнями, що розташовані під кутом один до одного, і взаємозв'язані шарнірно вершиною із коромислом, а кінцями - із кривошипом та повзуном, що установлений рухомо у прямолінійних напрямних із поздовжньою віссю, роз Винахід відноситься до машинобудування і може бути використаний як передавальний пристрій у різних поршневих машинах, металообробних верстатах, сільгоспмашинах і т д Відомо прямолінійно направляючий механізм, який містить стойку, кривошип, шарнірно зв'язаний одним кінцем із стойкою, коромисло, одним кінцем шарнірно зв'язане із стойкою з можливістю зворотно-обертового руху, та шатун, шарнірно зв'язаний із вільними кінцями кривошипа і коромисла, прямолінійну напрямну і встановлений у ній із можливістю зворотно-поступального руху повзун, при цьому шатун виконано у вигляді двоплечого важеля, плечі якого взаємно перпендикулярні і по довжині дорівнюють довжині коромисла, вершина шатуна шарнірно зв'язана із коромислом, а КІНЦІ шарнірно зв'язані із повзуном та кривошипом, пряма, що проходить через центри шарнірів, зв'язуючих кривошип та коромисло із стойкою, розташована під кутом 45° до прямої, що перпендикулярна поздовжный осі повзуна і проходить через центр шарніра, котрий зв'язує кривошип із стойкою, а усі ланки мають ПОСТІЙНІ ЛІНІЙНІ параметри, виражені певними співвідношеннями їх довжин ташованою під кутом 45 до лінії центрів шарнірів ПІДВІСКИ кривошипа та коромисла до стойки, причому кут між стержнями шатуна та співвідношення довжини коромисла, радіуса кривошипа, ходу повзуна, міжцентрової відстані шарнірів ПІДВІСКИ кривошипа та коромисла до стойки і відстані між поздовжньою віссю переміщення повзуна та центром шарніра кривошип - стойка мають визначені, розрахункові числові значення, який відрізняється тим, що рухоме з'єднання шатуна із повзуном виконано у вигляді жорстко закріпленої на шатуні втулки, що взаємодіє із жорстко закріпленим у повзуні стержнем через проміжну "плаваючу" ексцентрикову втулку, установлену на стержні 2 Пристрій за п 1, який відрізняється тим, що поверхня стержня, закріпленого у повзуні, в поздовжньому перерізі має форму овала /диво а с СРСР № 1803654 МПК F 16 Н21/04, опубл 23 03 93, бюл №11/ Однак даний прямолінійно направляючий механізм мав порівняно великі габарити при малому робочому ході повзуна, що зв'язано з великою металомісткістю та масою ланок, погіршенням динамічних характеристик механізма, зниженням його надійності і ДОВГОВІЧНОСТІ Найбільш близьким до пристрою, що заявляється /прототипом/ в прямолінійно направляючий механізм, який містить стойку, кривошип та коромисло, з'єднані шарнірне із стойкою, шатун, виконаний у вигляді У-образного симетричного важеля, плечі якого утворені двома однаковими за довжиною із коромислом стержнями, що розташовані під кутом один до одного, і взаємозв'язані шарнірно вершиною із коромислом, а кінцями - із кривошипом та повзуном, що установлений рухомо у прямолінійних напрямних із поздовжньою віссю, розташованою під кутом 45° до лінії центрів шарнірів ПІДВІСКИ кривошипа та коромисла до стойки, причому кут між стержнями шатуна та співвідношення довжини коромисла, радіуса кривошипа, хода повзуна, міжцент-рової відстані шарнірів ПІДВІСКИ кри (О ю о> ю 52956 форму овала вошипа та коромисла до стоики і відстані між поВинахід пояснюється кресленнями, де на фіг здовжньою віссю переміщення повзуна та центром 1 зображено кінематичну схему прямолінійно нашарніра кривошип - стойка мають визначені розра правляючого механізму, на фіг 2 - переріз А-А на -хункові числові значення / див патент України № фіг, 1 21410 МПК 6 F 16 Н 21/04, опубл 30 04 98, бюл №2/ Прямолінійно направляючий механізм виконано на базі плоского шарнірного чотириланковика і Недоліком цього прямолінійно направляючого містить стойку О, кривошип 1, з'єднаний із стойкою механізму в те, що для компенсації неточності 0 через циліндричний шарнір А, коромисло 2, тапрямолінійності руху точки приєднання повзуна на кож закріплене в стойці 0 за допомогою циліндришатуні в ньому використано дуже складне у консчного шарніра В, шатун 3, виконаний у вигляді труктивному відношенні з'єднання шатуна із повсиметричного У-образного важеля, плечі якого зуном Повзун виконаний у вигляді куліси, обладутворені стержнями 4 та 5, що розташовані у одній наної поперечним напрямним пазом, у якому площині під визначеним кутом один до одного, а рухомо встановлено камінь із розміщеним у ньому до вершини цього важеля за допомогою циліндриуніверсальним сферичним шарніром із циліндриччного шарніра С приєднано коромисло 2 Стерним пальцем, що жорстко з'єднаний із кінцем стежень 4 шатуна 3 своїм вільним кінцем приєднаний ржня У-образного шатуна, при цьому сферичний за допомогою циліндричного шарніра D до кривошарнір виконано у вигляді сферичного підшипника шипа 1, а стержень 5 через циліндричний шарнір ковзання, що установлений у напрямній втулці Е із проміжною "плавальною" втулкою 6 з'єднано із каменя куліси із можливістю пружного осьового повзуном 7, який установлено у напрямних 8 стойпереміщення До того ж, таке з'єднання через наки О» Поверхня закріпленого у повзуні 7 стержня 9 явність у ньому пружних елементів не може повніу поздовжньому перерізі має форму овала, що стю виключити реакцію з боку напрямних на поввзаємодіє через ексцентрикову втулку 6 із жорстко зун, а лише в якійсь мірі знижує м, тобто не є закріпленою на стержні 5 втулкою 10 ЛІНІЙНІ роздостатньо ефективним та надійним міри ланок механізму зв'язані між собою строгими В основу винаходу поставлено задачу удоскоспіввідношеннями налення прямолінійно направляючого механізму шляхом використання у ньому більш простого Прямолінійно направляючий механізм працює з'єднання шатуна із повзуном, яке в той же час таким чином При обертанні кривошипа І навколо дозволяє виключити реакцію з боку напрямних на нерухомої осі шарніра А кінематично зв'язане із повзун, тобто забезпечити компедедію неточності ним коромисло 2 буде виконувати зворотнопрямолінійності руху точки приєднання повзуна на обертовий рух навколо нерухомої осі шарніра В, шатуні, що дозволяє підвищити ефективність та шатун 3 буде виконувати плоско- паралельний надійність механізму рух, а його особлива точка Е буде переміщатися за ЛІНІЄЮ х-і - х-і , паралельною осі X, незначно Поставлена задача досягається тим, що у відхиляючись від неї у перпендикулярному напряпрямолінійно направляючому механізмі, який місмку, тобто за ЛІНІЄЮ, паралельною осі У Найтить стойку, кривошип та коромисло, з'єднані шарменше відхилення точки Е стержня 5 від лінії хі нірно із стойкою, шатун, виконаний у вигляді Ухі викличе взаємодію повзуна 7 із верхньою або образного симетричного важеля, плечі якого утвонижньою поверхнею напрямних 8, що приведе до рені двома однаковими за довжиною із коромиспояви сили тиску втулки 10 на ексцентрикову лом стержнями, що розташовані під кутом один до "плавальну" втулку 6 У зв'язку з ексцентричністю одного, і взаємозв'язані шарнірно вершиною із втулки 6 ця сила викличе на ній крутний момент, коромислом, а кінцями - із кривошипом та повзуякий поверне її на кут, що достатній для корректуном, що установлений рухомо у прямолінійних вання положення осі хі - хі стержня 9/ вона завнапрямних із поздовжньою віссю, розташованою жди повинна перетинати вісь хі - хі усунення взапід кутом 45° до лінії центрів шарнірів ПІДВІСКИ криємодії повзуна 7 із напрямними 8 вошипа та коромисла до стойки, причому кут між стержнями шатуна на співвідношення довжини Таким чином, забезпечується автоматичне коромисла, радіуса кривошипа, хода повзуна, міжпідтримування прямолінійності руху повзуна 7 і центрової відстані шарнірів ПІДВІСКИ кривошипа та усуваються реакції на нього з боку напрямних 8 коромисла до стойки і відстані між поздовжньою Крім того, з урахуванням овальності поверхні стевіссю переміщення повзуна та центром шарніра ржня 9 в поздовжньому перерізі, таке виконання кривошип - стойка мають визначені розрахункові прямолінійно направляючого механізму повністю числові значення, згідно з винаходом, рухоме з'єдзабезпечує його самоустановлення, усуває можнання шатуна із повзуном виконано у вигляді жорливість його самозаклинювання та дозволяє підстко закріпленої на шатуні втулки, що взаємодіє із вищити технологічність конструкції за рахунок жорстко закріпленим у повзуні стержнем через зниження вимог до точності виготовлення детапроміжну "плавальну" ексцентрикову втулку, усталей Отже, даний винахід дозволяє спростити новлену на стержні, причому поверхня закріпленоконструкцію прямолінійно направляючого механізго у повзуні стержня у поздовжньому перерізі мав му, підвищити його ефективність і надійність 52956 A-A Фіг.2 Фіг.1 TOB "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюStraightly directing mechanism
Автори англійськоюAkhtiamov Albert Minakhmetovych
Назва патенту російськоюПрямолинейно направляющий механизм
Автори російськоюАхтямов Альберт Минахметович
МПК / Мітки
МПК: F16H 21/04
Мітки: направляючий, механізм, прямолінійно
Код посилання
<a href="https://ua.patents.su/3-52956-pryamolinijjno-napravlyayuchijj-mekhanizm.html" target="_blank" rel="follow" title="База патентів України">Прямолінійно направляючий механізм</a>
Прямолінійно-направляючий механізм
Номер патенту: 15630
Опубліковано: 30.06.1997
Автори: Ахтямов Альберт Мінахметович, Павлик Володимир Іванович, Базовий Віктор Якович, Воробйов Віктор Костянтинович, Луговський Валерій Олександрович
МПК: F16H 21/04
Мітки: прямолінійно-направляючий, механізм
Формула / Реферат:
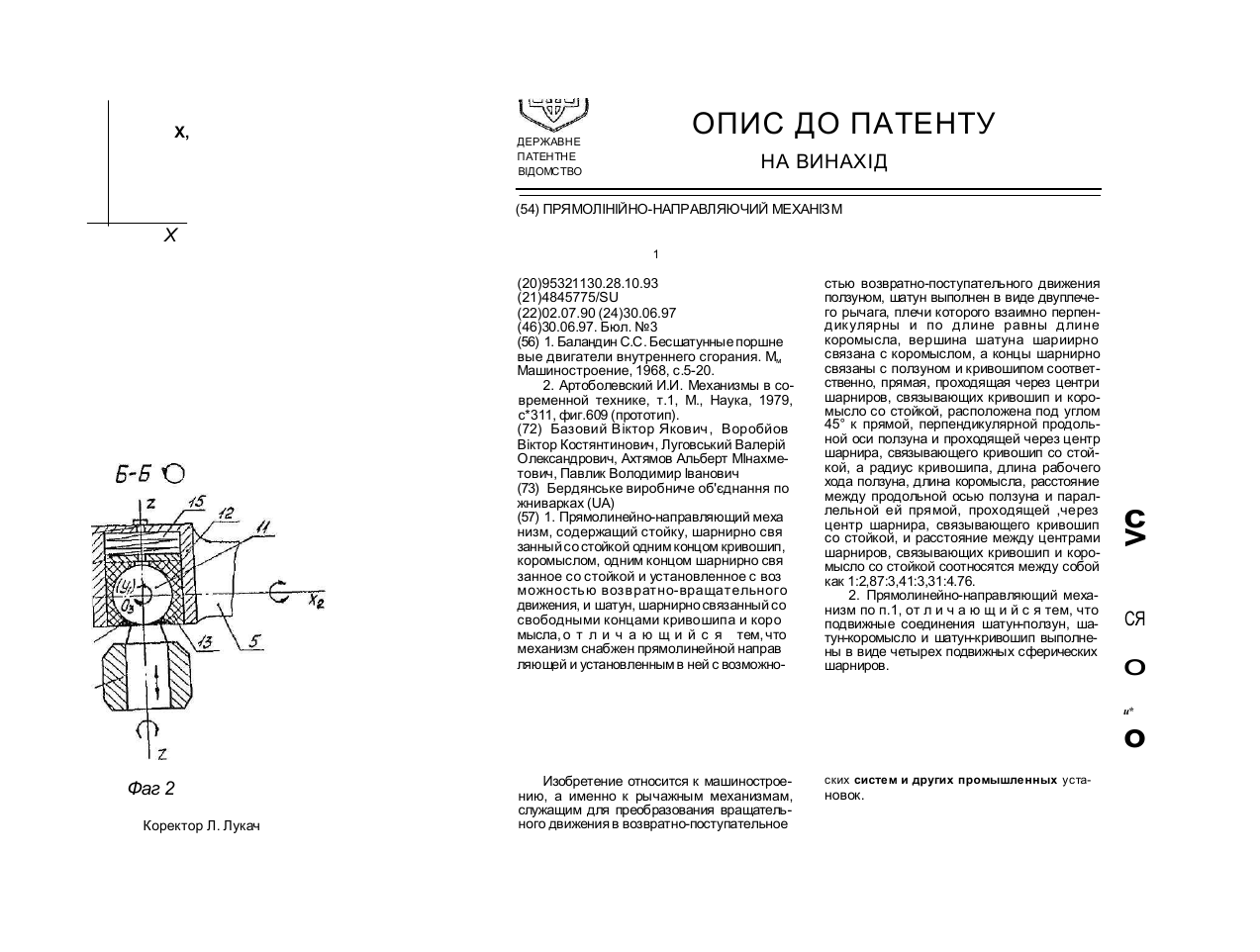
(57) 1. Прямолинейно-направляющий механизм, содержащий стойку, шарнирно связанный со стойкой одним концом кривошип, коромыслом, одним концом шарнирно связанное со стойкой и установленное с возможностью возвратно-вращательного движения, и шатун, шарнирно связанный со свободными концами кривошипа и коромысла, отличающийся тем, что механизм снабжен прямолинейной направляющей и установленным в ней с возможностью возвратно-поступательного...
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідних ланок
Номер патенту: 51985
Опубліковано: 16.12.2002
Автори: Кіницький Ярослав Тимофійович, Свєтловський Олександр Борисович
МПК: F16H 21/00
Мітки: механізм, вихідних, регульованою, ланок, тривалістю, шарнірно-важільний, зупинки
Формула / Реферат:
Шарнірно-важільний механізм з регульованою тривалістю зупинки вихідних ланок містить основу, на якій встановлені кривошип, коромисло і шатун у вигляді двоплечого важеля, що шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом, а іншим плечем за допомогою одного або декількох шатунів - з повзунами, який відрізняється тим, що довжина шатунів регульована.
Кулісно-важільний механізм з зупинками
Номер патенту: 44619
Опубліковано: 15.02.2002
Автори: Кіницький Ярослав Тимофійович, Свєтловський Олександр Борисович
МПК: F16H 21/00
Мітки: механізм, кулісно-важільний, зупинками
Формула / Реферат:
Кулісно-важільний механізм із зупинками, що має основу, на якій шарнірно встановлені кривошип і коромисло, зв'язані шатуном у вигляді двоплечевого важеля, один кінець якого зв'язаний з повзуном, що рухається вздовж паза куліси, центр шарніра якої знаходиться на рухомій основі, яка може змінювати своє положення паралельно прямолінійній ділянці шатунної кривої з можливістю фіксації її положення, який відрізняється тим, що положення центра...
Механізм щелкунова для перетворення обертального руху в коливальний
Номер патенту: 29369
Опубліковано: 16.10.2000
Автори: Щелкунов Єгор Єлисейович, Вороной Віталій Степанович, Прищепа Микола Петрович
МПК: F16H 21/40
Мітки: механізм, руху, обертального, щелкунова, коливальний, перетворення
Формула / Реферат:
1. Механізм для перетворення обертального руху в коливальний, що містить кривошип, кінематично зв’язаний з коромислом, який відрізняється тим, що кінематичний зв’язок кривошипа з коромислом здійснено за допомогою шарніра, причому плечі коромисла мають можливість одночасно взаємодіяти з робочою поверхнею введеного у пристрій копіра, що має можливість обертатися, і рівні по довжині з радіусом кривошипа.2. Механізм за п. 1, який...
Шарнірно-важільний механізм з зупинками

Номер патенту: 44535
Опубліковано: 15.02.2002
Автори: Кіницький Ярослав Тимофійович, Свєтловський Олександр Борисович
МПК: F16H 21/00
Мітки: зупинками, механізм, шарнірно-важільний
Формула / Реферат:
Шарнірно-важільний механізм з зупинками, який має основу, на якій встановлено кривошип, коромисло і шатун у вигляді двоплечого важеля, який шарнірно зв'язаний одним плечем з кривошипом, серединою - з коромислом який відрізняється тим, що іншим плечем він зв'язаний з двома або більше: трьома, чотирма, п'ятьма, шістьма шатунами, які відповідно шарнірно зв'язані з повзунами, завдяки чому забезпечується зупинка двох або більше вихідних ланок.
Попередній патент: Верстат для гарячого закочування кінців трубчастих заготівок
Наступний патент: Вільнопоршневий компресор з електромагнітним приводом
Випадковий патент: Спосіб виробництва метанолу з синтез-газу