Система керування положенням платформи
Номер патенту: 48332
Опубліковано: 15.08.2002
Автори: Смоляков Василь Андрійович, Наплеков Михайло Іванович, Васильченков Олег Георгійович, Бусяк Юрій Митрофанович, Магерамов Лютфалій Курбан-Алієвич, Лещенко В'ячеслав Михайлович, Ребров Олексій Анатолійович, Качанов Петро Олексійович, Головіна Олена Василівна, Безлепкін Олександр Андрійович
Формула / Реферат
Система керування положенням платформи, що містить контролер персонального комп'ютера, з'єднаний із трьома електроприводами, кожний з яких містить послідовно з'єднані цифровий регулятор, електродвигун, кінематично зв'язаний з редуктором, що обладнаний датчиком положення вихідного вала редуктора i за допомогою кривошипно-шатунного механізму з'єднаний із платформою, причому до другого i третього входів цифрового регулятора відповідно підключені виходи датчика струму електродвигуна i датчика швидкості обертання вала електродвигуна, встановленого на валу електродвигуна, яка відрізняється тим, що в кожний електропривід введені послідовно з'єднані датчик положення ротора електродвигуна, перший суматор, інтегратор, другий суматор, вихід якого підключений до четвертого входу цифрового регулятора, другий вихід датчика положення ротора електродвигуна з'єднаний із другим входом другого суматора, причому датчик положення ротора електродвигуна кінематично зв'язаний з електродвигуном, а вихід датчика положення вихідного вала редуктора з'єднаний із другим входом першого суматора.
Текст
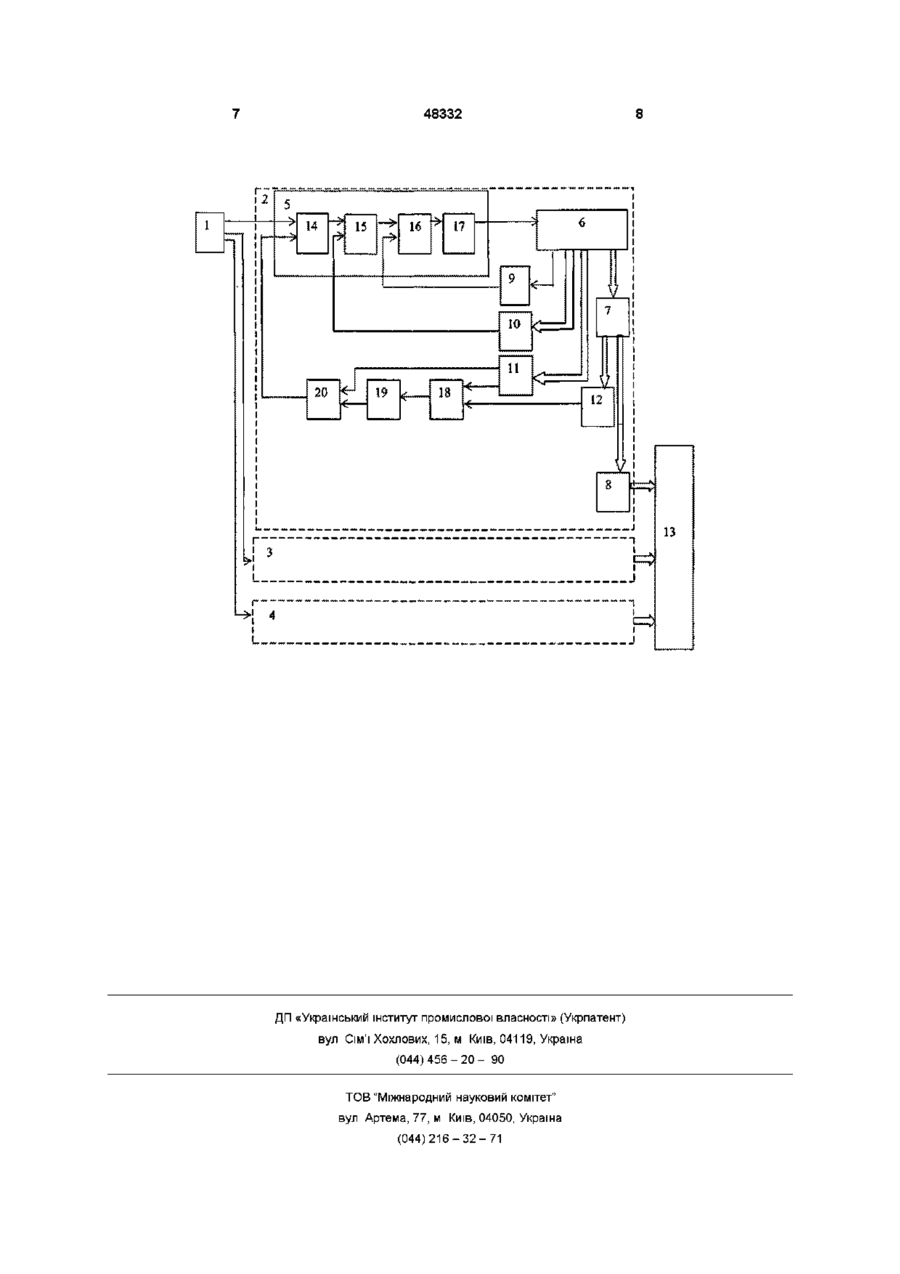
Система керування положенням платформи, що містить контролер персонального комп'ютера, з'єднаний із трьома електроприводами, кожний з Винахід відноситься до систем автоматичного керування і може бути використаний для електроприводів, що забезпечують переміщення робочих органів механізмів на задану величину Відомий пристрій для керування вентильним позиційним електроприводом постійного струму з використанням триконтурної замкнутої системи підпорядкованого регулювання Пристрій містить внутрішній контур регулювання струму в ланцюзі якоря електродвигуна з датчиком струму, регулятором струму і другим суматором, внутрішній контур регулювання частоти обертання вала електродвигуна з регулятором частоти обертання, датчиком частоти обертання і першим суматором, ЗОВНІШНІЙ контур регулювання положення вихідного вала електродвигуна з блоком завдання переміщення, датчиком положення і регулятором положення вихідного вала електродвигуна (Авт свид СССР № 1261934 публ7 10 86, МПК G01D3/00) Відомий пристрій дозволяє забезпечити переміщення робочого органа механізму на задану яких містить послідовно з'єднані цифровий регулятор, електродвигун, кінематично зв'язаний з редуктором, що обладнаний датчиком положення вихідного вала редуктора і за допомогою кривошипношатунного механізму з'єднаний із платформою, причому до другого і третього входів цифрового регулятора ВІДПОВІДНО підключені виходи датчика струму електродвигуна і датчика швидкості обертання вала електродвигуна, встановленого на валу електродвигуна, яка відрізняється тим, що в кожний електропривод введені послідовно з'єднані датчик положення ротора електродвигуна, перший суматор, інтегратор, другий суматор, вихід якого підключений до четвертого входу цифрового регулятора, другий вихід датчика положення ротора електродвигуна з'єднаний із другим входом другого суматора, причому датчик положення ротора електродвигуна кінематично зв'язаний з електродвигуном, а вихід датчика положення вихідного вала редуктора з'єднаний із другим входом першого суматора величину тільки по одній ОСІ координат Відома також система керування положенням платформи в тривимірному просторі, що містить контролер персонального комп'ютера, три електроприводи платформи Кожний електропривод побудований по замкнутій триконтурній схемі підпорядкованого регулювання і містить у собі внутрішній контур пропорційно - інтегрального регулювання струму електродвигуна, внутрішній контур пропорційно - інтегрального регулювання швидкості обертання вала електродвигуна і ЗОВНІШНІЙ контур пропорційно-інтегрального регулювання положення вихідного вала редуктора Кожний електропривод містить послідовно з'єднані цифровий регулятор, електродвигун змінного струму з датчиком швидкості обертання вала електродвигуна і датчиком струму електродвигуна, редуктор з датчиком положення вихідного вала редуктора і кривошипно-шатунний механізм Контролер персонального комп'ютера формує безперервний потік кодів значень кутів повороту кривошипа кожного електропривода Після відпра О со го 00 48332 цьовування заданого коду кожний електропривод повертає ВІДПОВІДНИЙ кривошип кривошипношатунного механізму на задану величину, і шатун переміщається в площині, перпендикулярній осі обертання кривошипу Таким чином змінюється положення платформи в тривимірному просторі (Рекламний проспект фірми "Servos & Simulation's Company Mission Statement & Information" Модель 300-3, жовтень 1999 року http //www servos com) Недоліком відомої системи є недостатньо висока точність відпрацьовування електроприводами заданих переміщень, тому що система не враховує похибку, що виникає через люфти та пружності редуктора В основу винаходу поставлена задача створення системи керування положенням платформи, у якій введення вітки корекції зворотного зв'язку в контур регулювання положення вихідного вала редуктора кожного електропривода дозволить підвищити точність відпрацьовування електроприводами заданих значень кутів повороту кривошипа, що приведе до підвищення точності керування положенням платформи в тривимірному просторі Система керування положенням платформи, що заявляється, також як і відома система містить контролер персонального комп'ютера, до якого паралельно підключені три електроприводи і платформа Кожний електропривод містить у собі послідовно з'єднані цифровий регулятор, електродвигун, кінематичне зв'язаний з редуктором, обладнаним датчиком положення вихідного вала редуктора Вихідний вал редуктора за допомогою кривошипно-шатунного механізму з'єднаний із платформою Електродвигун обладнаний датчиком струму До другого і третього входів цифрового регулятора підключені, ВІДПОВІДНО, ВИХОДИ дат чиків струму і електродвигуна швидкості обертання вала ВІДПОВІДНО ДО винаходу в кожний електропривод уведені послідовно з'єднані датчик положення ротора електродвигуна, перший суматор, інтегратор, другий суматор, вихід якого підключений до четвертого входу цифрового регулятора Другий вихід датчика положення ротора електродвигуна з'єднаний із другим входом другого суматора, а вихід датчика положення вихідного вала редуктора з'єднаний із другим входом першого суматора Введення в кожний електропривод у замкнутий контур пропорційно-інтегрального регулювання положення вихідного вала редуктора вітки послідовно з'єднаних датчика положення ротора електродвигуна, першого суматора, інтегратора і другого суматора дозволяє підвищити точність відпрацьовування заданих кутів кривошипа за рахунок обліку похибці, що зумовлена люфтами та пружностями, які властиві редуктору Похибка між заданим і фактичним значенням положення кривошипа враховується шляхом віднімання кодів датчиків положення ротора електродвигуна і положення вихідного вала редуктора в першому суматорі, інтегрування одержаної різниці і додавання результату безпосередньо до коду датчика положення ротора електродвигуна в другому суматорі На кресленні приведена функціональна схема системи керування положенням платформи Контролер 1 персонального комп'ютера з'єд наний паралельно з трьома електроприводами 2,3,4 Кожний із трьох електроприводів 2,3,4 містить послідовно з'єднані цифровий регулятор 5, електродвигун 6, кінематичне зв'язаний з редуктором 7 і кривошипно-шатунним механізмом 8 Електродвигун 6, наприклад, вентильний синхронний із збудженням від постійних магнітів і електронною комутацією струму у фазах, містить датчик 9 струму в ланцюзі якоря Електродвигун 6 обладнаний установленим на його валу датчиком 10 швидкості обертання вала електродвигуна і датчиком 11 положення ротора електродвигуна Редуктор 7 обладнаний датчиком 12 положення вихідного вала редуктора Кривошипно-шатунний механізм 8 кінематичне зв'язаний із платформою 13 Цифровий регулятор 5 містить послідовно з'єднані регулятор 14 положення вихідного вала редуктора, регулятор 15 швидкості, регулятор 16 струму електродвигуна і підсилювач 17 потужності При цьому перший вхід цифрового регулятора 5 є першим входом регулятора 14 положення вихідного вала редуктора, а виходом цифрового регулятора 5 є вихід підсилювача потужності 17 Другим, третім і четвертим входами цифрового регулятора 5 є , ВІДПОВІДНО, другі входи регулятора 16 струму електродвигуна, регулятора 15 швидкості обертання вала електродвигуна і регулятора 14 положення вихідного вала редуктора Кожний із трьох електроприводів 2,3,4 побудований по замкнутій трьох контурній схемі підпорядкованого регулювання Перший внутрішній контур - контур регулювання струму електродвигуна 6 утворений з'єднанням датчика 9 струму електродвигуна з другим входом цифрового регулятора 5 (ВІДПОВІДНО, другим входом регулятора 16 струму електродвигуна) Другий внутрішній контур - контур регулювання швидкості обертання вала електродвигуна 6 утворений з'єднанням датчика 10 швидкості обертання вала електродвигуна, із третім входом цифрового регулятора 5 (ВІДПОВІДНО, другим входом регулятора 15 швидкості обертання вала електродвигуна) Третій контур - ЗОВНІШНІЙ контур регулювання положення вихідного вала редуктора, утворений з'єднанням датчика 11 положення ротора електродвигуна, першого суматора 18, інтегратора 19, другого суматора 20 і датчика 12 положення вихідного вала редуктора, вихід якого з'єднаний із другим входом першого суматора 18 Другий вихід датчика 11 положення ротора електродвигуна з'єднаний із другим входом другого суматора 20, вихід якого з'єднаний з четвертим входом цифрового регулятора 5 (ВІДПОВІДНО другим входом регулятора 14 положення вихідного вала редуктора) Система керування положенням платформи функціонує наступним чином Контролер 1 персонального комп'ютера формує безперервний потік кодів значень кутів повороту ВІДПОВІДНОГО кривошипа кривошипношатунного механізму 8, що надходить на кожний електропривод 2,3 4 Після відпрацьовування заданого коду кожний електропривод повертає ВІДПОВІДНИЙ кривошип кривошипно-шатунного механізму 8 на задану величину, і шатун переміщається 48332 у площині перпендикулярній осі обертання кривошипу Таким чином, змінюється положення платформи в тривимірному просторі Кожний електропривод функціонує наступним чином Сигнал у виді коду значення кута повороту кривошипа кривошипно-шатунного механізму 8 надходить з контролера 1 персонального комп'ютера на перший вхід регулятора 14 положення вихідного вала редуктора, а на його другий вхід надходить сигнал, що відповідає дійсному значенню кута повороту кривошипа кривошипношатунного механізму 8 Регулятор 14 положення вихідного вала редуктора порівнює сигнали, що надійшли, і формує на своєму виході код, що відповідає заданому значенню швидкості обертання вала електродвигуна 6 Цей код надходить на перший вхід регулятора 15 швидкості обертання вала електродвигуна На другий вхід регулятора 15 швидкості обертання вала електродвигуна надходить код зворотного зв'язку з датчика 10 швидкості обертання вала електродвигуна Регулятор 15 швидкості обертання вала електродвигуна порівнює сигнали, що надійшли у виді кодів, і формує на своєму виході код, що відповідає заданому значенню струму електродвигуна, що надходить на перший вхід регулятора 16 струму електродвигуна На другий вхід регулятора 16 струму електродвигуна з датчика 9 струму електродвигуна надходить код дійсного значення струму статорних обмоток електродвигуна 6 Регулятор 16 струму електродвигуна порівнює сигнали, що, надійшли, і видає код на вхід підсилювача 17 потужності Підсилювач 17 потужності формує на своєму виході значення струму, що проходить через статорні обмотки електродвигуна 6, значення якого пропорційно коду на виході регулятора 16 струму електродвигуна Вал електродвигуна 6 обертається доти , поки коди на першому і другому входах регулятора 14 положення вихідного вала редуктора стануть рівними, що будуть відповідати переміщенню кривошипа кривошипно-шатунного механізму 8 на задану величину При цьому сигнали датчика 11 положення ротора електродвигуна і датчика 12 положення вихідного вала редуктора підсумовуються в першому суматорі 18, різниця інтегрується в інтеграторі 19 і надходить на другий суматор 20, де підсумовується із сигналом датчика 11 положення ротора електродвигуна Сигнал з виходу другого суматора 20 у вигляді коду надходить на другий вхід регулятора 14 положення вихідного вала редуктора Інтегрована різниця значень сигналів датчика 11 положення ротора електродвигуна і датчика 12 положення вихідного вала редуктора є інтегральною складовою сигналу зворотного зв'язку контуру регулювання положення вихідного вала редуктора, що враховує похибку між заданим і фактичним значенням положення кривошипа, зумовлену люфтами і пружністю редуктора Таким чином, введення в кожному електроприводі у контур регулювання положення вихідного вала редуктора вітки корекції зворотного зв'язку дозволяє підвищити точність відпрацьовування електроприводами заданих переміщень кривошипа, внаслідок чого, значно зростає точність керування положенням платформи в тривимірному просторі 48332 14 г» І? 15 10 11 20 18 12 13 і ! З і •! 4 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for controlling angle position of a rotary platform
Автори англійськоюBusiak Yurii Mytrofanovych, Maheramov Liutfalii Kurban-Aliievych, Maheramov Liuftfalii Kurban-Alievych, Smoliakov Vasyl Andriiovych
Назва патенту російськоюСистема регулирования уголового положения поворотной платформы
Автори російськоюБусяк Юрий Митрофанович, Магерамов Лютфалий Курбан-Алиевич, Смоляков Василий Андреевич
МПК / Мітки
МПК: G05D 1/08
Мітки: платформи, система, керування, положенням
Код посилання
<a href="https://ua.patents.su/4-48332-sistema-keruvannya-polozhennyam-platformi.html" target="_blank" rel="follow" title="База патентів України">Система керування положенням платформи</a>
Система керування об’єктом із запізнюванням
Номер патенту: 34774
Опубліковано: 15.03.2001
Автори: Жиляков Віктор Іванович, Ткачов Роман Юрійович
МПК: G05B 13/02
Мітки: запізнюванням, система, об'єктом, керування
Формула / Реферат:
Система керування об'єктом із запізнюванням, що містить послідовно сполучені: перший елемент порівняння, перший регулятор, об'єкт із запізнюванням, другий елемент порівняння, а також залучену до виходу першого регулятора модель чистого запізнювання і залучену до входу другого елемента порівняння першу модель інерційної частини об'єкта, яка відрізняється тим, що вона додатково обладнана другою моделлю інерційної частини об'єкта, другим...
Система керування вогнем танка
Номер патенту: 32632
Опубліковано: 15.02.2001
Автори: Руденко Микола Прохорович, Фролов Леонід Андрійович, Бусяк Юрій Митрофанович
МПК: F41G 5/00
Мітки: вогнем, керування, система, танка
Текст:
...з відомим контуром регулювання, що включає датчик кута вертикального наведення, балістичний обчислювач та привід наведення гармати, дозволило не тільки усунути ручні операції та автоматизувати процес узгодження лінії візування нічного прицілу з віссю каналу ствола гармати при подачі сигналу з виходу да тчика кута вертикального наведення і тим самим добитися скорочення часу для приведення . системи у стан го товності , а отже, і...
Електрогідравлічна система повороту платформи самохідного транспортного засобу
Номер патенту: 7869
Опубліковано: 26.12.1995
Автори: Домрачев Олександр Федорович, Хрущов Валерій Миколайович, Богданов Сергій Михайлович, Рибко Олександр Володимирович, Альперін Юхим Андрійович, Мержиєвський Валентин Вацлавович, Пузирьов Юрій Іванович, Івженко Анатолій Володимирович, Лисенко Володимир Сергійович, Цибізов Олександр Георгійович
МПК: F15B 11/00, B66C 13/18
Мітки: повороту, транспортного, платформи, система, електрогідравлічна, самохідного, засобу
Формула / Реферат:
(57) 1. Электрогидравлическая система поворота платформы самоходного транспортного средства, содержащая насос с приводом от регулируемого двигателя внутреннего сгорания, соединенный напорной гидролинией с предохранительным клапаном и, через трехпозиционный гидрораспределитель, - с гидромотором поворота, с гидроцилиндром тормоза последнего и со сливной гидролинией, а также дроссель, обратный клапан и тумблер переключения направления поворота,...
Система автоматизованого керування вітродвигуном вітроенергетичноі установки
Номер патенту: 22963
Опубліковано: 15.03.2002
Автори: Кириченко Анатолій Семенович, Тютріна Тамара Павлівна, Козак Леонід Романович, Кочерга Григорій Федорович, Латайко Олександр Петрович, Голубенко Микола Степанович
МПК: F03D 7/04
Мітки: керування, вітроенергетичноі, установки, система, автоматизованого, вітродвигуном
Формула / Реферат:
1. Система автоматического управления ветродвигателем ветроэнергетической установки, содержащая ветродвигатель, связанный кинематически с генератором, исполнительный орган ветродвигателя с приводом-регулятором, соединенным входом с выходом сумматора, подключенного первым входом к задатчику положения привода-регулятора, вторым входом через усилитель с широкой зоной нечувствительности - к датчику мощности 'енератора, а третьим входом через...
Система керування вогнем танка
Номер патенту: 45502
Опубліковано: 15.04.2002
Автори: Руденко Микола Прохорович, Фролов Леонід Андрійович, Походняков Валерій Георгійович, Бондаренко Олександр Григорович, Бусяк Юрій Митрофанович
МПК: F41G 5/00
Мітки: система, танка, керування, вогнем
Формула / Реферат:
Система керування вогнем танка, що містить блок керування приводами, балістичний обчислювач, блок індикації, механізм заряджання, нічний приціл, денний приціл, що складається з датчика кута вертикального наведення, кінематично зв'язаного з гіростабілізатором, пульта керування, перший вихід якого з'єднаний з першим входом гіростабілізатора, пристрою введення типу балістик, пристрою введення дальності, з'єднаного з першим входом балістичного...
Попередній патент: Магнітний сепаратор
Наступний патент: Композиційний матеріал для антифрикційних деталей
Випадковий патент: Спосіб металізації кремнієвих підкладок