Спосіб орієнтування екіпажу гусеничної броньованої машини під час підводного водіння
Номер патенту: 56497
Опубліковано: 10.01.2011
Автори: Сендецький Микола Миколайович, Закусило Петро Степанович, Романченко Ігор Сергійович, Кудрицький Максим Олександрович, АНДРІЄВСЬКИЙ АНДРІЙ ПЕТРОВИЧ, Печатніков Сергій Миколайович
Формула / Реферат
1. Спосіб орієнтування екіпажу гусеничної броньованої машини під час підводного водіння, при якому попередньо її комплектують двигуном, рушієм, баштою, відділенням управління, гіронапівкомпасом та засобами радіозв'язку, виводять гусеничну броньовану машину у місце підготовки перед підводним водінням, установлюють трубу живлення повітрям на башту, герметизують гусеничну броньовану машину, вмикають засоби радіозв'язку, який відрізняється тим, що додатково встановлюють та нерухомо фіксують камеру відеоспостереження на трубі живлення повітрям, встановлюють у відділені управління та у башті гусеничної броньованої машини монітори, поєднують монітори та камеру відеоспостереження електричними дротами, живлять монітори та камеру відеоспостереження від бортової електричної мережі.
2. Спосіб орієнтування екіпажу гусеничної броньованої машини під час підводного водіння за п. 1, який відрізняється тим, що одержують відеоінформацію про наявність перешкод, розміщених по курсу руху гусеничної броньованої машини, спрямовують гусеничну броньовану машину під час підводного водіння залежно від відеоінформації, яка одержана за допомогою зазначеного додаткового обладнання.
Текст
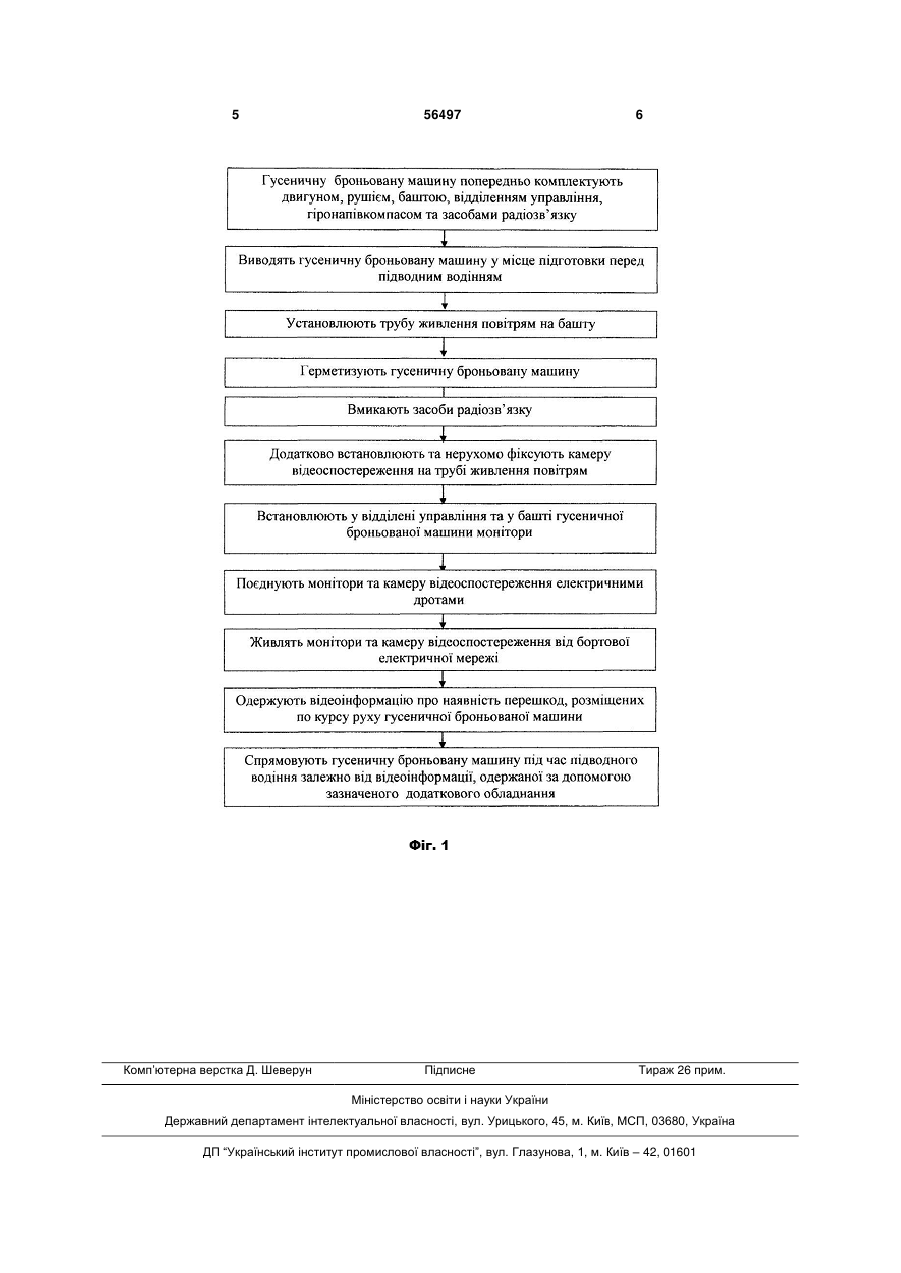
1. Спосіб орієнтування екіпажу гусеничної броньованої машини під час підводного водіння, при якому попередньо її комплектують двигуном, рушієм, баштою, відділенням управління, гіронапівкомпасом та засобами радіозв'язку, виводять гусеничну броньовану машину у місце підготовки перед підводним водінням, установлюють трубу живлення повітрям на башту, герметизують гусе 3 показники підводного водіння гусеничної броньованої машини та підвищити безпеку руху під водою. Суть корисної моделі у способі орієнтування екіпажу гусеничної броньованої машини під час підводного водіння, за якого попередньо її комплектують двигуном, рушієм, баштою, відділенням управління, гіронапівкомпасом та засобами радіозв'язку, виводять гусеничну броньовану машину у місце підготовки перед підводним водінням, установлюють трубу живлення повітрям на башту, герметизують гусеничну броньовану машину, вмикають засоби радіозв'язку, полягає у тому, що додатково встановлюють та нерухомо фіксують камеру відеоспостереження на трубі живлення повітрям, встановлюють у відділені управління та у башті гусеничної броньованої машини монітори, поєднують монітори та камеру відеоспостереження електричними дротами, живлять монітори та камеру відеоспостереження від бортової електричної мережі. Суть корисної моделі досягається також і тим, що одержують відеоінформацію про наявність перешкод, розміщених по курсу руху гусеничної броньованої машини, спрямовують гусеничну броньовану машину під час підводного водіння залежно від відеоінформації, яка одержана за допомогою зазначеного додаткового обладнання. Порівняний аналіз технічного рішення, яке заявляється, із прототипом, дозволяє зробити висновок, що спосіб орієнтування екіпажу гусеничної броньованої машини під час підводного водіння, відрізняється тим, що додатково встановлюють та нерухомо фіксують камеру відеоспостереження на трубі живлення повітрям, встановлюють у відділені управління та у башті гусеничної броньованої машини монітори, поєднують монітори та камеру відеоспостереження електричними дротами, живлять монітори та камеру відеоспостереження від бортової електричної мережі, одержують відеоінформацію про наявність перешкод, розміщених по курсу руху гусеничної броньованої машини, спрямовують гусеничну броньовану машину під час підводного водіння залежно від відеоінформації, яка одержана за допомогою зазначеного додаткового обладнання. Суть способу орієнтування екіпажу гусеничної броньованої машини під час підводного водіння пояснюється за допомогою ілюстрацій, де фіг. 1 представлена блок-схема послідовності технологічних операцій, що становлять суть способу орієнтування екіпажу гусеничної броньованої машини під час підводного водіння, який заявляється. Згідно схеми на фіг. 1 суть орієнтування екіпажу гусеничної броньованої машини під час підводного водіння, який заявляється, пояснюється за допомогою технологічних 56497 4 операцій, що у сукупності становлять суть зазначеного способу. Гусеничну броньовану машину, яка попередньо укомплектована двигуном, рушієм, баштою, відділенням управління, гіронапівкомпасом та засобами радіозв'язку, екіпаж виводить у місце підготовки перед підводним водінням, встановлює на башту трубу живлення повітрям, герметизує гусеничну броньовану машину, перевіряє засоби радіозв'язку. Після перевірки екіпаж додатково встановлює та нерухомо фіксує камеру відеоспостереження у верхній частині труби живлення повітрям, встановлює монітори у відділені управління перед механіком-водієм та у башті гусеничної броньованої машини перед командиром машини, поєднує монітори та камеру відеоспостереження електричними дротами, забезпечує живлення моніторів та камер відеоспостереження від бортової електричної мережі. Під час підводного водіння гусеничної броньованої машини екіпаж одержує візуальну інформацію про наявність перешкод, розміщених по курсу руху гусеничної броньованої машини, спрямовує гусеничну броньовану машину під час підводного водіння залежно від відеоінформації. Більша ефективність способу, який заявляється, порівняно прототипом, досягається за рахунок здійснення технологічних операцій щодо встановлення додаткового обладнання відеоспостереження, які становлять основу способу і забезпечують відеоспостереження за напрямком руху гусеничної броньованої машини, достатню точність визначення місця розташування гусеничної броньованої машини під водою, зниження ролі гіронапівкомпаса, своєчасне прийняття рішення щодо об'їзду перешкоди, рух гусеничної броньованої машини у створі переправи, а в умовах низьких температур навколишнього середовища унеможливлюють вихід гусеничної броньованої машини за межі майни, що значно підвищує безпеку підводного водіння гусеничної броньованої машини. Підвищення ефективності завдяки заявленому способу досягається ще й тим, що за допомогою додаткового обладнання у разі переривання зв'язку та відмови гіронапівкомпаса забезпечується своєчасність прийняття рішення щодо самостійного виходу гусеничної броньованої машини на берег без зупинок. Джерела інформації: 1. Боевая машина пехоты БМП-2. Техническое описание и инструкция по эксплуатации. Стр. 240244. 4.2. - М: Воениздат, 1988. - 328 с. - аналог. 2. Танк Т-64А. Техническое писание и инструкция по эксплуатации. Стр.269-271,рис. 130. Кн 1. 1973.-332 с. -прототип. 3. Танки Т-54А, Т-54Б, Т-55, Т-62. Памятка экипажу по эксплуатации. Стр. 66-72. - М: Воениздат, 1985. - 224 с. - прототип. 5 Комп’ютерна верстка Д. Шеверун 56497 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of orientation for crew of armored vehicle during underwater driving
Автори англійськоюRomanchenko Ihor Serhiiovych, Zakusylo Petro Stepanovych, Pechatnikov Serhii Mykolaiovych, Andriievskyi Andrii Petrovych, Kudrytskyi Maksym Oleksandrovych, Sendetskyi Mykola Mykolaiovych
Назва патенту російськоюСпособ ориентирования экипажа гусеничной бронированной машины во время подводного вождения
Автори російськоюРоманченко Игорь Сергеевич, Закусило Петр Степанович, Печатников Сергей Николаевич, Андриевский Андрей Петрович, Кудрицкий Максим Александрович, Сендецкий Николай Николаевич
МПК / Мітки
МПК: B60R 99/00
Мітки: водіння, броньованої, машини, гусеничної, орієнтування, екіпажу, спосіб, підводного
Код посилання
<a href="https://ua.patents.su/3-56497-sposib-oriehntuvannya-ekipazhu-gusenichno-bronovano-mashini-pid-chas-pidvodnogo-vodinnya.html" target="_blank" rel="follow" title="База патентів України">Спосіб орієнтування екіпажу гусеничної броньованої машини під час підводного водіння</a>
Спосіб підвищення ефективності застосування гусеничної броньованої ремонтно-евакуаційної машини
Номер патенту: 52580
Опубліковано: 25.08.2010
Автори: Григораш Олексій Григорович, Печатніков Сергій Миколайович, Кудрицький Максим Олександрович, АНДРІЄВСЬКИЙ АНДРІЙ ПЕТРОВИЧ, Закусило Петро Степанович, Романченко Ігор Сергійович, Сендецький Микола Миколайович, Хазанович Олександр Ізраільович
МПК: B66F 11/00
Мітки: гусеничної, броньованої, машини, застосування, підвищення, ефективності, спосіб, ремонтно-евакуаційної
Формула / Реферат:
1. Спосіб підвищення ефективності застосування гусеничної броньованої ремонтно-евакуаційної машини, при якому попередньо її комплектують двигуном, рушієм, вантажопідйомним краном, лебідкою з тросом, напрямними роликами з обмежувачами троса, виводять машину на місце ремонтно-евакуаційних робіт та здійснюють монтажні роботи за допомогою вантажопідйомного крана, який відрізняється тим, що додатково встановлюють на машину сошник, гідравлічний...
Система автоматичного водіння самохідної колісної машини
Номер патенту: 71847
Опубліковано: 15.12.2004
Автори: Парфьонова Наталя Сергійовна, Поляшенко Сергій Олексійович
МПК: A01B 69/04
Мітки: водіння, система, колісної, самохідної, автоматичного, машини
Формула / Реферат:
Система автоматичного водіння самохідної колісної машини, що містить регулятор, виконавчий елемент, датчик копіювання, датчик положення керуючих коліс і суматор, яка відрізняється тим, що з метою підвищення точності відстеження заданої траєкторії, введені регульований інтегратор і датчик швидкості, причому регульований інтегратор включений послідовно між додатковим входом суматора і виходом датчика копіювання, а ланцюг керування коефіцієнтом...
Панель керування гусеничної машини
Номер патенту: 41024
Опубліковано: 27.04.2009
Автори: Кузнецов Геннадій Олександрович, Бобровський Олександр Іванович, Волосніков Сергій Олександрович, Павленко Сергій Анатолійович, Фурсов Олександр Анатолійович
МПК: B60K 37/00
Мітки: машини, гусеничної, керування, панель
Формула / Реферат:
1. Панель керування гусеничної машини, призначена для передачі інформації водію про стан основних агрегатів і систем за допомогою контрольних приладів, сигналізаторів, а також для керування різними системами гусеничної машини за допомогою органів керування і автоматів захисту, розташованих на пультах керування та індикації, яка відрізняється тим, що органи керування розміщуються на пультах керування відповідними системами та відображають...
Спосіб модернізації броньованої машини
Номер патенту: 59418
Опубліковано: 15.09.2003
Автори: Борисюк Михайло Дем'янович, Бершов Олександр Вікторович, Мухар Олександр Володимирович, Магерамов Лютфалій Курбан-Алієвич, Бусяк Юрій Митрофанович, Горожанин Юрій Георгийович, Кудров Володимир Михайлович
МПК: F41H 7/02
Мітки: машини, модернізації, спосіб, броньованої
Формула / Реферат:
1. Спосіб модернізації броньованої машини, що включає демонтаж замінного моторно-трансмісійного блока, переробку корпусу броньованої машини, що модернізується, і монтаж установлюваного моторно-трансмісійного блока, який відрізняється тим, що спочатку визначають відношення де:A1 - габарит установлюваного моторно-трансмісійного блока, мм;А2 - габарит...
Панель керування гусеничної машини
Номер патенту: 23761
Опубліковано: 11.06.2007
Автори: Кузнєцов Геннадій Олександрович, Волосніков Сергій Олександрович, Бобровський Олександр Іванович, Фурсов Олександр Анатолійович, Бондар Олександр Іванович, Павленко Сергій Анатолійович
МПК: B60K 37/00
Мітки: керування, гусеничної, машини, панель
Формула / Реферат:
1. Панель керування гусеничної машини, призначена для передачі інформації водію про стан основних агрегатів і систем за допомогою контрольних приладів (8), сигналізаторів (4), а також для керування різними системами гусеничної машини за допомогою органів керування (5) і автоматів захисту (6), розташованих на пультах керування (2) та індикації (3), яка відрізняється тим, що органи керування (5) розміщуються на пультах керування (2)...
Попередній патент: Спосіб визначення жирнокислотного стану ліпідного складу комплексу кипрію (іван-чаю)
Наступний патент: Пальник для спалювання органічних видів палива
Випадковий патент: Спосіб хірургічної обробки грижового мішка при прямих пахових грижах