Токарний багатоцільовий верстат
Формула / Реферат
Токарний багатоцільовий верстат, що містить станину з напрямними, передню нерухому і задню рухому бабки з приводами обертання шпиндельних вузлів з затискними патронами, револьверну головку, розташовану на корпусі хрестового супорта, який відрізняється тим, що передня бабка виконана у вигляді мотор-шпинделя з механізованим затискним патроном для заготовки, а задня бабка містить мотор-шпиндель пінольного типу з висувним шпиндельним вузлом, оснащеним інструментальним затискним патроном, приводи подачі, наприклад, кульково-гвинтові по двох координатах в горизонтальній площині.
Текст
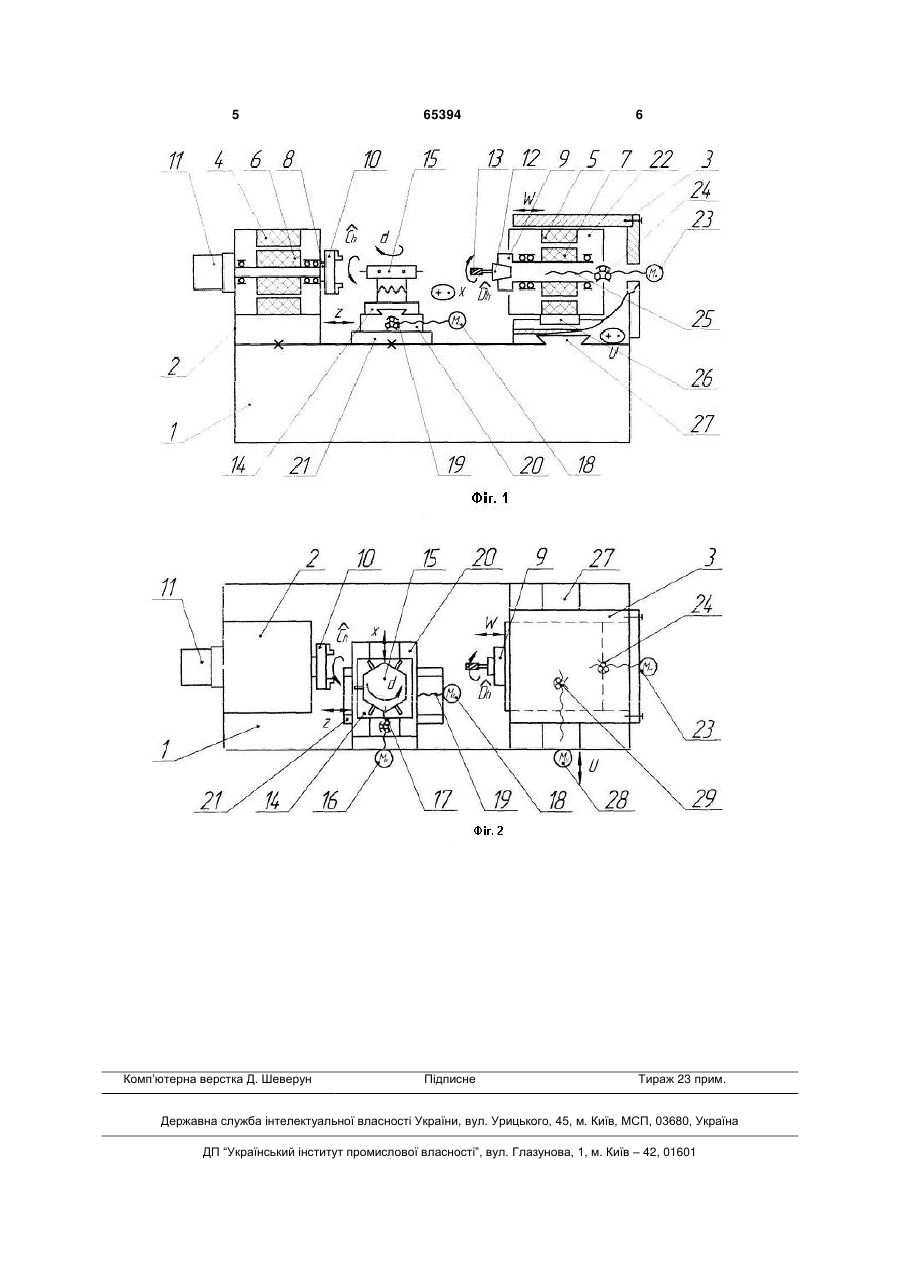
Токарний багатоцільовий верстат, що містить станину з напрямними, передню нерухому і задню рухому бабки з приводами обертання шпиндель 3 результат розширення технологічних можливостей верстата, збільшення кількості рухів інструментів в просторі і підвищення продуктивності обробки. Поставлена задача вирішується тим, що в токарному багатоцільовому верстаті, що містить станину з напрямними, передню нерухому і задню рухому бабки з приводами обертання шпиндельних вузлів з затискними патронами, револьверну головку, розташовану на корпусі хрестового супорта, новим є те, що передня бабка виконана у вигляді мотор-шпинделя з механізованим затискним патроном для заготовки, а задня бабка містить мотор-шпиндель пінольного типу з висувним шпиндельним вузлом, оснащеним інструментальним затискним патроном, приводи подачі, наприклад, кульково-гвинтові по двох координатах в горизонтальній площині. Виконання передньої і задньої бабок у вигляді мотор-шпинделів дозволяє підвищити швидкості різання і тому продуктивність обробки, а виконання задньої бабки пінольного типу з інструментальним затискним патроном і двома приводами подачі збільшує кількість рухів інструменту і розширює технологічні можливості верстата: фрезерування складних пазів в торці деталі, неспіввісне свердління тощо. Суть корисної моделі пояснюється кресленнями, де на фіг. 1 зображено принципову кінематичну схему верстата, а на фіг.2 - вид зверху, фіг.1. Верстат містить станину 1 (фіг.1), нерухому передню бабку 2 і рухому задню бабку 3 з приводами обертання (координати Ch і Dh у вигляді мотор-шпинделів, що містять відповідно нерухомі статори 4, 5 і обертаючі ротори 6, 7 на шпинделях 8, 9. Попереду шпинделя 8 розташований затискаючий патрон 10 для заготовки (не показана) з механізованим приводом затиску 11, а попереду шпинделя 9 розташований інструментальний затискний патрон 12, наприклад, цанговий для затиску інструменту 13. На корпусі 14 хрестового супорта розміщена револьверна головка 15 з інструментами, які змінюються за рахунок повороту револьверної головки (координата сі). Переміщення револьверної головки 15 по координаті X забезпечується кроковим електродвигуном 16 (фіг.2) через кульковогвинтову передачу 17, а переміщення по координаті Z - кроковим електродвигуном 18 через кульково-гвинтову передачу 19, що рухає нижню каретку 20 по напрямним 21, розташованим на станині 1. 65394 4 В корпусі 3 (фіг.1) розташована піноль 22, яка переміщується по координаті W від крокового електродвигуна 23 через кульково-гвинтову передачу 24, причому гвинт 25 знаходиться в отворі шпинделя 9, а гайка з кульками зв'язана жорстко з піноллю 22. Від повороту піноль 22 утримується шпонкою 26 або іншим способом. Поперечне переміщення задньої бабки З по напрямним 27 по координаті U забезпечується від крокового електродвигуна 28 через кульково-гвинтову передачу 29. Керування виконавчими органами верстата здійснюється від системи ЧПК (на фіг. 1 і 2 не показано). Верстат працює наступним чином. Заготовка (не показана) закріпляється в затискному патроні 10 при нерухомому шпинделі 8. Після чого вона отримує обертання при подачі струму на статор 4, який завдяки електромагнітним силам обертає ротор 6 разом із шпинделем 8. Аналогічно затискається інструмент 13 в шпинделі 9 і він починає обертатися від статора 5 через ротор 7. Від системи ЧПК подаються команди для виконання формоутворюючих рухів приводам подач 16, 17 (координата X) 18, 19 (координата Z) 23, 24 (координата W), 28, 29 (координата U), а періодичний поворот (координата d) револьверної головки 15 для зміни інструменту здійснюється від окремого привода (не показаний). Після закінчення обробки шпиндель 8 зупиняється, а затискний патрон 10 розтискається, звільняючи готову деталь. Встановлюється наступна заготовка і цикл повторюється. На верстаті може бути передбачена автоматична зміна інструменту 13 за рахунок встановлення на задній бабці 3 інструментального магазину і автооператора (не показано) [3]. Джерела інформації 1. А.с., СРСР №1576252А1. Токарный много3 целевой станок, МПК В23В3 /31, заявл.01.08.88, опубл.07.07.90, Бюл.№26. 2. Кузнецов Ю.Н., Дмитриев Д.А., Диневич Г.Е. Компоновка станков с механизмами параллельной структуры./Под ред.Ю.Н.Кузнецова. - Херсон: ПП Вышемирский B.C., 2010.-471 с. (рис. 2.18 г, с.104, рис. 2.19, с.105). 3. Кузнецов Ю.Н., Срибный Л.Н. Повышение эффективности токарных автоматов - К.: Техника, 1989.-168 с.(рис.19, с.29). 5 Комп’ютерна верстка Д. Шеверун 65394 6 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMilling-turning machining center
Автори англійськоюKuznietsov Yurii Mykolaiovych
Назва патенту російськоюТокарный многоцелевой станок
Автори російськоюКузнецов Юрий Николаевич
МПК / Мітки
МПК: B23B 5/00
Мітки: верстат, багатоцільовий, токарний
Код посилання
<a href="https://ua.patents.su/3-65394-tokarnijj-bagatocilovijj-verstat.html" target="_blank" rel="follow" title="База патентів України">Токарний багатоцільовий верстат</a>
Токарний багатоцільовий верстат
Номер патенту: 47848
Опубліковано: 25.02.2010
Автори: Кузнєцов Юрій Миколайович, Дмитрієв Дмитро Олексійович, Подольський Михаил Ігорович
Мітки: токарний, верстат, багатоцільовий
Формула / Реферат:
1. Токарний багатоцільовий верстат, що містить станину з напрямними, шпиндельну бабку із шпиндельним вузлом і затискним патроном, задню бабку і інструментальну систему, розташовану з можливістю переміщення по напрямних на корпусі рухомої частини, що встановлена на штангах постійної довжини, кінці яких шарнірно зв'язані з корпусом, а кожний протилежний кінець шарнірно зв'язаний з приводом подачі, який відрізняється тим, що станина жорстко...
Токарний багатоцільовий верстат
Номер патенту: 27808
Опубліковано: 12.11.2007
Автори: Кузнєцов Юрій Миколайович, Дмитрієв Дмитро Олексійович
Мітки: токарний, верстат, багатоцільовий
Формула / Реферат:
1. Токарний багатоцільовий верстат, що містить станину з напрямними, шпиндельну бабку із шпиндельним вузлом і затискним патроном, задню бабку і револьверну головку, розташовану на корпусі рухомої частини з можливістю переміщення по напрямних, який відрізняється тим, що корпус рухомої частини встановлений на штангах постійної довжини, верхні кінці яких шарнірно зв'язані з ним, а кожний нижній кінець шарнірно зв'язаний з кроковим двигуном через...
Токарний багатоцільовий верстат

Номер патенту: 50648
Опубліковано: 25.06.2010
Автори: Кузнецов Юрій Миколайович, Галицький Олександр Олександрович, Плакса Дмитро Юрійович, Подольський Михайло Ігорович, Дмитрієв Дмитро Олексійович
Мітки: токарний, верстат, багатоцільовий
Формула / Реферат:
Токарний багатоцільовий верстат, що містить станину з напрямними, шпиндельну бабку зі шпиндельним вузлом і затискним патроном, задню бабку і револьверну головку, розташовану з можливістю переміщення по напрямних на корпусі рухомої частини, що встановлена на штангах постійної довжини, одні кінці яких шарнірно зв'язані з ним, а кожний протилежний кінець шарнірно зв'язаний з механізмом подачі, який відрізняється тим, що корпус рухомої частини...
Токарний багатоцільовий верстат

Номер патенту: 49348
Опубліковано: 26.04.2010
Автори: Кеба Павло Васильович, Подольський Михайло Ігорович, Рожко Оксана Ігорівна, Дмитрієв Дмитро Олексійович, Кузнєцов Юрій Миколайович
Мітки: багатоцільовий, токарний, верстат
Формула / Реферат:
Токарний багатоцільовий верстат, що містить станину з напрямними, оснащену затискним патроном передню шпиндельну бабку, два окремих супорти із револьверними головками, платформами під них, встановленими на штангах постійної довжини, нижні кінці яких спираються на напрямні верстата і зв'язані з механізмами поздовжньої подачі, який відрізняється тим, що шпиндельна бабка містить щонайменше два шпинделі із затискними патронами з можливістю її...
Токарний багатоцільовий верстат
Номер патенту: 48735
Опубліковано: 25.03.2010
Автори: Грисюк Олександр Віталійович, Савицький Сергій Олександрович, Рожко Оксана Ігорівна, Подольський Михайло Ігорович, Дмитрієв Дмитро Олексійович, Кузнєцов Юрій Миколайович
Мітки: верстат, токарний, багатоцільовий
Формула / Реферат:
Токарний багатоцільовий верстат, що містить станину з повздовжніми напрямними під каретку супорта, шпиндельну бабку із шпиндельним вузлом і затискним патроном, задню бабку і револьверну головку, розташовану на корпусі рухомої частини, яка встановлена через шарнірні з'єднання на штангах постійної довжини з можливістю переміщення від приводів по напрямних протилежних кінців штанг, шарнірно зв'язаних з повзунами, який відрізняється тим, що...
Попередній патент: Надвисокочастотний металодіелектричний фільтр
Наступний патент: Спосіб вимірювання теплового опору напівпровідникових діодів
Випадковий патент: Пристрій для стабілізації обертального руху літального апарата в набігаючому потоці