Токарний багатоцільовий верстат
Номер патенту: 50648
Опубліковано: 25.06.2010
Автори: Кузнецов Юрій Миколайович, Подольський Михайло Ігорович, Дмитрієв Дмитро Олексійович, Галицький Олександр Олександрович, Плакса Дмитро Юрійович

Формула / Реферат
Токарний багатоцільовий верстат, що містить станину з напрямними, шпиндельну бабку зі шпиндельним вузлом і затискним патроном, задню бабку і револьверну головку, розташовану з можливістю переміщення по напрямних на корпусі рухомої частини, що встановлена на штангах постійної довжини, одні кінці яких шарнірно зв'язані з ним, а кожний протилежний кінець шарнірно зв'язаний з механізмом подачі, який відрізняється тим, що корпус рухомої частини оснащений приводом повздовжньої подачі і виконаний у вигляді каркаса клиноподібної форми з ребрами, паралельно до яких розташовані механізми подачі протилежних кінців штанг постійної довжини.
Текст
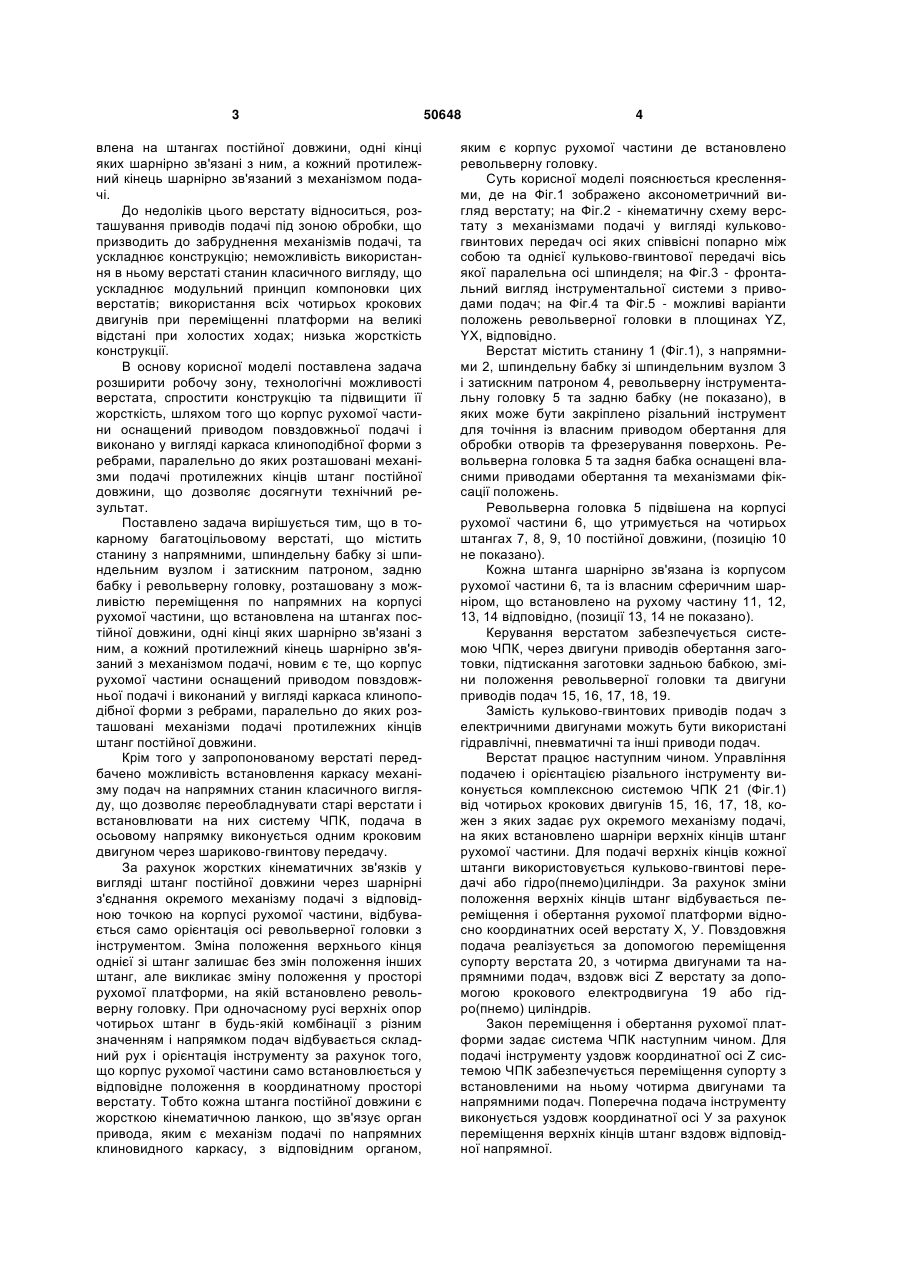
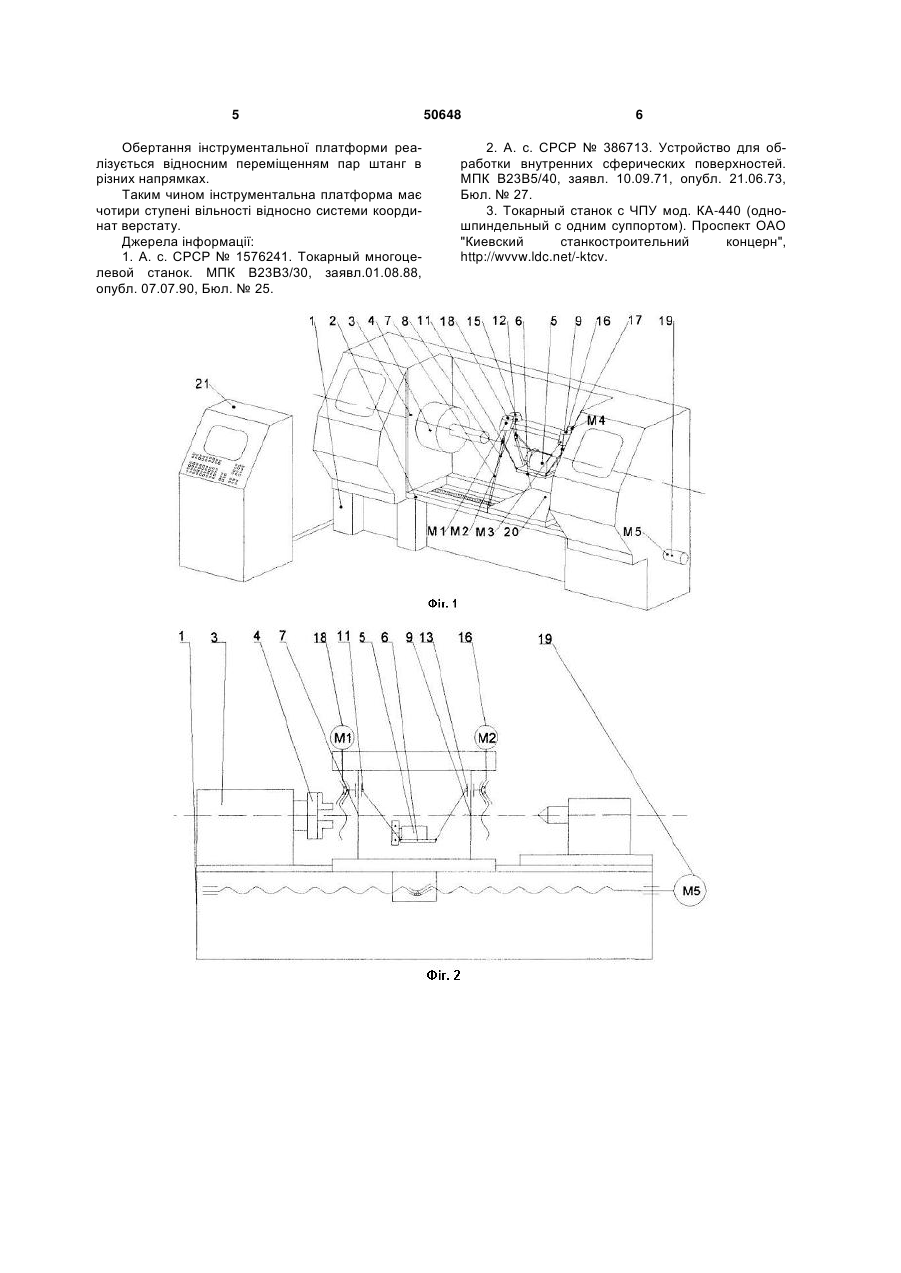
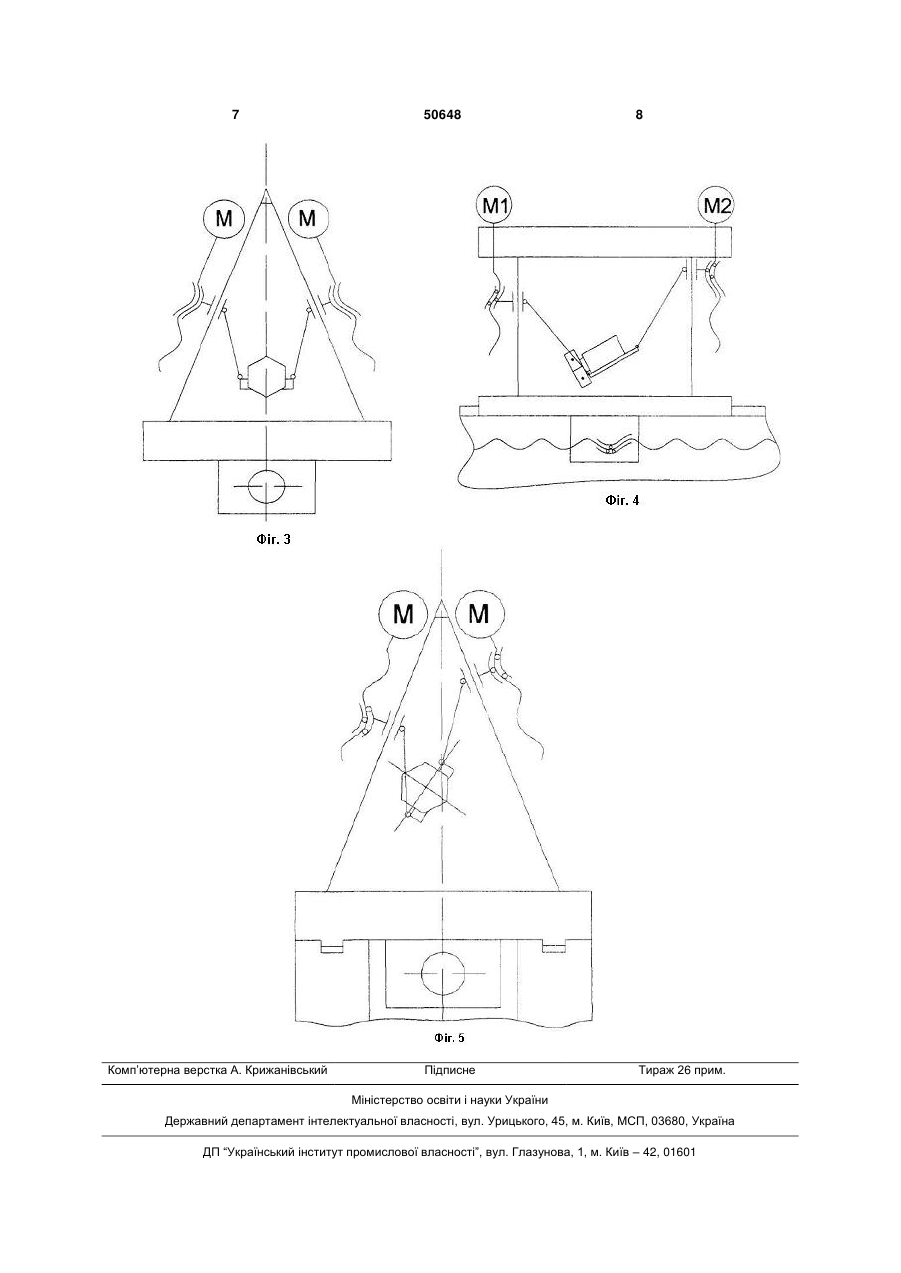
Токарний багатоцільовий верстат, що містить станину з напрямними, шпиндельну бабку зі шпи 3 влена на штангах постійної довжини, одні кінці яких шарнірно зв'язані з ним, а кожний протилежний кінець шарнірно зв'язаний з механізмом подачі. До недоліків цього верстату відноситься, розташування приводів подачі під зоною обробки, що призводить до забруднення механізмів подачі, та ускладнює конструкцію; неможливість використання в ньому верстаті станин класичного вигляду, що ускладнює модульний принцип компоновки цих верстатів; використання всіх чотирьох крокових двигунів при переміщенні платформи на великі відстані при холостих ходах; низька жорсткість конструкції. В основу корисної моделі поставлена задача розширити робочу зону, технологічні можливості верстата, спростити конструкцію та підвищити її жорсткість, шляхом того що корпус рухомої частини оснащений приводом повздовжньої подачі і виконано у вигляді каркаса клиноподібної форми з ребрами, паралельно до яких розташовані механізми подачі протилежних кінців штанг постійної довжини, що дозволяє досягнути технічний результат. Поставлено задача вирішується тим, що в токарному багатоцільовому верстаті, що містить станину з напрямними, шпиндельну бабку зі шпиндельним вузлом і затискним патроном, задню бабку і револьверну головку, розташовану з можливістю переміщення по напрямних на корпусі рухомої частини, що встановлена на штангах постійної довжини, одні кінці яких шарнірно зв'язані з ним, а кожний протилежний кінець шарнірно зв'язаний з механізмом подачі, новим є те, що корпус рухомої частини оснащений приводом повздовжньої подачі і виконаний у вигляді каркаса клиноподібної форми з ребрами, паралельно до яких розташовані механізми подачі протилежних кінців штанг постійної довжини. Крім того у запропонованому верстаті передбачено можливість встановлення каркасу механізму подач на напрямних станин класичного вигляду, що дозволяє переобладнувати старі верстати і встановлювати на них систему ЧПК, подача в осьовому напрямку виконується одним кроковим двигуном через шариково-гвинтову передачу. За рахунок жорстких кінематичних зв'язків у вигляді штанг постійної довжини через шарнірні з'єднання окремого механізму подачі з відповідною точкою на корпусі рухомої частини, відбувається само орієнтація осі револьверної головки з інструментом. Зміна положення верхнього кінця однієї зі штанг залишає без змін положення інших штанг, але викликає зміну положення у просторі рухомої платформи, на якій встановлено револьверну головку. При одночасному русі верхніх опор чотирьох штанг в будь-якій комбінації з різним значенням і напрямком подач відбувається складний рух і орієнтація інструменту за рахунок того, що корпус рухомої частини само встановлюється у відповідне положення в координатному просторі верстату. Тобто кожна штанга постійної довжини є жорсткою кінематичною ланкою, що зв'язує орган привода, яким є механізм подачі по напрямних клиновидного каркасу, з відповідним органом, 50648 4 яким є корпус рухомої частини де встановлено револьверну головку. Суть корисної моделі пояснюється кресленнями, де на Фіг.1 зображено аксонометричний вигляд верстату; на Фіг.2 - кінематичну схему верстату з механізмами подачі у вигляді кульковогвинтових передач осі яких співвісні попарно між собою та однієї кульково-гвинтової передачі вісь якої паралельна осі шпинделя; на Фіг.3 - фронтальний вигляд інструментальної системи з приводами подач; на Фіг.4 та Фіг.5 - можливі варіанти положень револьверної головки в площинах YZ, YX, відповідно. Верстат містить станину 1 (Фіг.1), з напрямними 2, шпиндельну бабку зі шпиндельним вузлом 3 і затискним патроном 4, револьверну інструментальну головку 5 та задню бабку (не показано), в яких може бути закріплено різальний інструмент для точіння із власним приводом обертання для обробки отворів та фрезерування поверхонь. Револьверна головка 5 та задня бабка оснащені власними приводами обертання та механізмами фіксації положень. Револьверна головка 5 підвішена на корпусі рухомої частини 6, що утримується на чотирьох штангах 7, 8, 9, 10 постійної довжини, (позицію 10 не показано). Кожна штанга шарнірно зв'язана із корпусом рухомої частини 6, та із власним сферичним шарніром, що встановлено на рухому частину 11, 12, 13, 14 відповідно, (позиції 13, 14 не показано). Керування верстатом забезпечується системою ЧПК, через двигуни приводів обертання заготовки, підтискання заготовки задньою бабкою, зміни положення револьверної головки та двигуни приводів подач 15, 16, 17, 18, 19. Замість кульково-гвинтових приводів подач з електричними двигунами можуть бути використані гідравлічні, пневматичні та інші приводи подач. Верстат працює наступним чином. Управління подачею і орієнтацією різального інструменту виконується комплексною системою ЧПК 21 (Фіг.1) від чотирьох крокових двигунів 15, 16, 17, 18, кожен з яких задає рух окремого механізму подачі, на яких встановлено шарніри верхніх кінців штанг рухомої частини. Для подачі верхніх кінців кожної штанги використовується кульково-гвинтові передачі або гідро(пнемо)циліндри. За рахунок зміни положення верхніх кінців штанг відбувається переміщення і обертання рухомої платформи відносно координатних осей верстату X, У. Повздовжня подача реалізується за допомогою переміщення супорту верстата 20, з чотирма двигунами та напрямними подач, вздовж вісі Z верстату за допомогою крокового електродвигуна 19 або гідро(пнемо) циліндрів. Закон переміщення і обертання рухомої платформи задає система ЧПК наступним чином. Для подачі інструменту уздовж координатної осі Z системою ЧПК забезпечується переміщення супорту з встановленими на ньому чотирма двигунами та напрямними подач. Поперечна подача інструменту виконується уздовж координатної осі У за рахунок переміщення верхніх кінців штанг вздовж відповідної напрямної. 5 Обертання інструментальної платформи реалізується відносним переміщенням пар штанг в різних напрямках. Таким чином інструментальна платформа має чотири ступені вільності відносно системи координат верстату. Джерела інформації: 1. А. с. СРСР № 1576241. Токарный многоцелевой станок. МПК В23В3/30, заявл.01.08.88, опубл. 07.07.90, Бюл. № 25. 50648 6 2. А. с. СРСР № 386713. Устройство для обработки внутренних сферических поверхностей. МПК В23В5/40, заявл. 10.09.71, опубл. 21.06.73, Бюл. № 27. 3. Токарный станок с ЧПУ мод. КА-440 (одношпиндельный с одним суппортом). Проспект ОАО "Киевский станкостроительний концерн", http://wvvw.ldc.net/-ktcv. 7 Комп’ютерна верстка А. Крижанівський 50648 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMultiple machining lathe
Автори англійськоюKuznetsov Yurii Mykolaiovych, Dmytriev Dmytro Oleksiiovych, Podolskyi Mykhailo Ihorovych, Plaksa Dmytro Yuriiovych, Halytskyi Oleksandr Oleksandrovych
Назва патенту російськоюТокарный многоцелевой станок
Автори російськоюКузнецов Юрий Николаевич, Дмитриев Дмитрий Алексеевич, Подольский Михаил Игоревич, Плакса Дмитрий Юрьевич, Галицкий Александр Александрович
МПК / Мітки
Мітки: токарний, багатоцільовий, верстат
Код посилання
<a href="https://ua.patents.su/4-50648-tokarnijj-bagatocilovijj-verstat.html" target="_blank" rel="follow" title="База патентів України">Токарний багатоцільовий верстат</a>
Токарний багатоцільовий верстат
Номер патенту: 27808
Опубліковано: 12.11.2007
Автори: Кузнєцов Юрій Миколайович, Дмитрієв Дмитро Олексійович
Мітки: верстат, багатоцільовий, токарний
Формула / Реферат:
1. Токарний багатоцільовий верстат, що містить станину з напрямними, шпиндельну бабку із шпиндельним вузлом і затискним патроном, задню бабку і револьверну головку, розташовану на корпусі рухомої частини з можливістю переміщення по напрямних, який відрізняється тим, що корпус рухомої частини встановлений на штангах постійної довжини, верхні кінці яких шарнірно зв'язані з ним, а кожний нижній кінець шарнірно зв'язаний з кроковим двигуном через...
Токарний багатоцільовий верстат
Номер патенту: 48735
Опубліковано: 25.03.2010
Автори: Савицький Сергій Олександрович, Подольський Михайло Ігорович, Грисюк Олександр Віталійович, Кузнєцов Юрій Миколайович, Рожко Оксана Ігорівна, Дмитрієв Дмитро Олексійович
Мітки: багатоцільовий, верстат, токарний
Формула / Реферат:
Токарний багатоцільовий верстат, що містить станину з повздовжніми напрямними під каретку супорта, шпиндельну бабку із шпиндельним вузлом і затискним патроном, задню бабку і револьверну головку, розташовану на корпусі рухомої частини, яка встановлена через шарнірні з'єднання на штангах постійної довжини з можливістю переміщення від приводів по напрямних протилежних кінців штанг, шарнірно зв'язаних з повзунами, який відрізняється тим, що...
Токарний багатоцільовий верстат

Номер патенту: 49348
Опубліковано: 26.04.2010
Автори: Кузнєцов Юрій Миколайович, Кеба Павло Васильович, Дмитрієв Дмитро Олексійович, Рожко Оксана Ігорівна, Подольський Михайло Ігорович
Мітки: токарний, багатоцільовий, верстат
Формула / Реферат:
Токарний багатоцільовий верстат, що містить станину з напрямними, оснащену затискним патроном передню шпиндельну бабку, два окремих супорти із револьверними головками, платформами під них, встановленими на штангах постійної довжини, нижні кінці яких спираються на напрямні верстата і зв'язані з механізмами поздовжньої подачі, який відрізняється тим, що шпиндельна бабка містить щонайменше два шпинделі із затискними патронами з можливістю її...
Токарний багатоцільовий верстат
Номер патенту: 30376
Опубліковано: 25.02.2008
Автори: Самойленко Олексій Васильович, Дмитрієв Дмитро Олексійович, Кузнєцов Юрій Миколайович
Мітки: багатоцільовий, токарний, верстат
Формула / Реферат:
Токарний багатоцільовий верстат, що містить станину з напрямними, нерухому передню та рухому задню співвісні шпиндельні бабки, кожна з яких оснащена шпиндельним вузлом із затискним патроном, та револьверну головку, розташовану на супорті з можливістю переміщення вздовж напрямних, який відрізняється тим, що супорт виконаний у вигляді поворотної платформи з вертикальною віссю повороту, основа якої встановлена на штангах постійної довжини, нижні...
Токарний багатоцільовий верстат
Номер патенту: 47848
Опубліковано: 25.02.2010
Автори: Кузнєцов Юрій Миколайович, Дмитрієв Дмитро Олексійович, Подольський Михаил Ігорович
Мітки: токарний, багатоцільовий, верстат
Формула / Реферат:
1. Токарний багатоцільовий верстат, що містить станину з напрямними, шпиндельну бабку із шпиндельним вузлом і затискним патроном, задню бабку і інструментальну систему, розташовану з можливістю переміщення по напрямних на корпусі рухомої частини, що встановлена на штангах постійної довжини, кінці яких шарнірно зв'язані з корпусом, а кожний протилежний кінець шарнірно зв'язаний з приводом подачі, який відрізняється тим, що станина жорстко...
Попередній патент: Роторна машина чубикала м.б.
Наступний патент: Насос артезіанський
Випадковий патент: Спосіб одержання похідних карбазолу або їх фізіологічно прийнятних солей