Пристрій для контролю негабаритності вантажу транспортних засобів
Номер патенту: 65962
Опубліковано: 26.12.2011
Автори: Коросташевський Павло Володимирович, Тесленко Дмитро Олександрович, Ганин Михайло Павлович

Формула / Реферат
Пристрій для контролю негабаритності вантажу транспортних засобів, який включає П-подібні ворота, установлені над рейковим шляхом, датчики контролю негабаритності вантажу, що закріплені на стійках і поперечці П-подібних воріт і засоби обробки й запису інформації, який відрізняється тим, що на кожній вертикальній стійці й поперечці П-подібних воріт розташовано по одному датчику контролю негабаритності вантажу, де датчик контролю негабаритності вантажу кожної з вертикальних стійок закріплений на каретці, обладнаній датчиком контролю положення каретки й приводом її переміщення, який складається із лебідки з електроприводом, при цьому каретка з датчиком контролю положення каретки й датчиком контролю негабаритності вантажу рухомо закріплена на вертикальній стійці з можливістю зворотно-поступального переміщення уздовж її, а датчик контролю негабаритності вантажу поперечки П-подібних воріт закріплений на самохідному візку з датчиком контролю положення самохідного візка, рухомо установленого на поперечці з можливістю зворотно-поступального переміщення уздовж її, причому переміщення кареток вздовж стійок та самохідного візка вздовж поперечки П-подібних воріт обмежено кінцевими вимикачами, виходи яких з'єднані за допомогою вимірювальних кабелів з блоком керування, а виходи всіх датчиків, що встановлені на каретках та самохідному візку, пов'язаних за допомогою з'єднувальних кабелів з персональною електронною обчислювальною машиною, яка з'єднана з блоком керування.
Текст
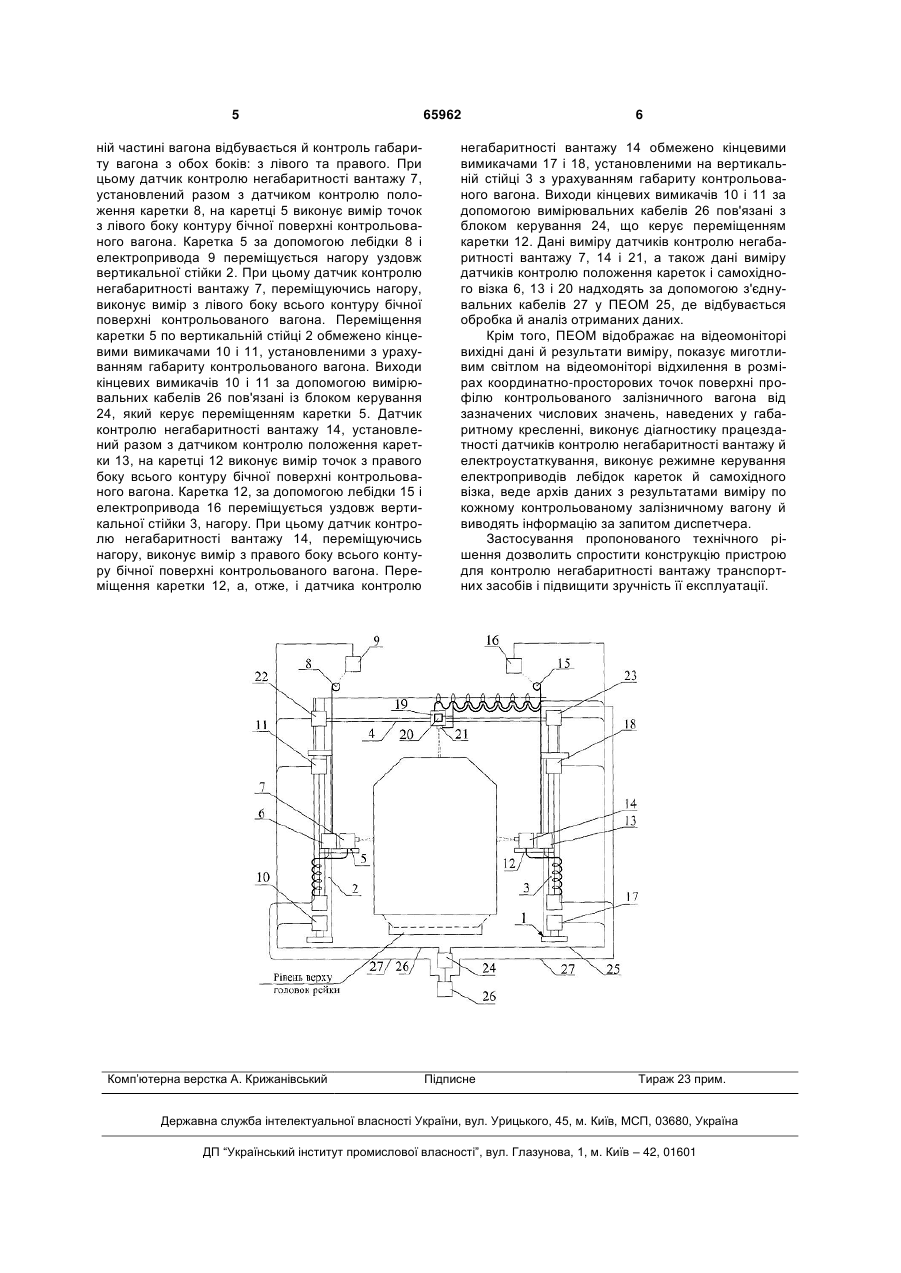
Пристрій для контролю негабаритності вантажу транспортних засобів, який включає П-подібні ворота, установлені над рейковим шляхом, датчики контролю негабаритності вантажу, що закріплені на стійках і поперечці П-подібних воріт і засоби обробки й запису інформації, який відрізняється тим, що на кожній вертикальній стійці й поперечці П-подібних воріт розташовано по одному датчику контролю негабаритності вантажу, де датчик контролю негабаритності вантажу кожної з вертикальних стійок закріплений на каретці, обладнаній датчиком контролю положення каретки й приводом її 3 установлену над рейковим шляхом, на якій розміщені п'ять оптоелектронних датчиків контролю габаритності навантаження й оптоелектронний датчик рахунку вагонів. Виходи всіх оптоелектронних датчиків пов'язані з входом блока індикації й узгодження, вихід якого зв'язаний з ПЕОМ оператора. Система обладнана чотирма оптоелектронними датчиками контролю габаритності навантаження, що встановлені по межах сполученого зонального габариту навантаження й габариту рухомого складу при обрисі бічного габариту навантаження по габариту рухомого складу, і оптоелектронними датчикам рахунку колісних пар, розташованими на П-подібній конструкції, при цьому оптоелектронний датчик визначення початку складу також розташований на П-подібній конструкції, а блок індикації й узгодження виконаний з можливістю роботи в автономному режимі. [Патент № 2249523, МПК. В61К9/02, 2004 р., РФ]. Недолік відомої системи полягає в тому, що кожний оптоелектронний датчик являє собою двопозиційний пристрій, який складається із блока випромінювача й блока фотоприймача, де блок випромінювача формує іфрачервоний промінь, що направляється на фотоприймач. Крім того, для визначення негабаритності вантажу в даній системі використовується 12 блоків випромінювання й 12 блоків фотоприймача, що робить її конструктивно складною й незручною в експлуатації. В основу корисної моделі поставлено задачу створення пристрою для контролю негабаритності вантажу транспортних засобів простого по конструкції, не складного в роботі й надійного в експлуатації. Поставлена задача вирішується тим, що в пристрої для контролю негабаритності вантажу транспортних засобів, який включає П-подібні ворота, установлені над рейковим шляхом, датчики контролю негабаритності вантажу, що закріплені на стійках і поперечці П-подібних воріт і засоби обробки й запису інформації, згідно з корисною моделлю, на кожній вертикальній стійці й поперечці П-подібних воріт розташовано по одному датчику контролю негабаритності вантажу, де датчик контролю негабаритності вантажу кожної з вертикальних стійок закріплений на каретці, обладнаній датчиком контролю положення каретки й приводом її переміщення, який складається із лебідки з електроприводом, при цьому каретка з датчиком контролю положення каретки й датчиком контролю негабаритності вантажу рухомо закріплена на вертикальній стійці з можливістю зворотнопоступального переміщення вздовж її, а датчик контролю негабаритності вантажу поперечки Пподібних воріт закріплений на самохідному візку з датчиком контролю положення самохідного візка, рухомо установленого на поперечці з можливістю зворотно-поступального переміщення уздовж її, причому переміщення кареток вздовж стійок та самохідного візка вздовж поперечки обмежено кінцевими вимикачами, виходи яких з'єднані за допомогою вимірювальних кабелів з блоком керування, а виходи всіх датчиків, що встановлені на каретках та самохідному візку пов'язані за допомо 65962 4 гою з'єднувальних кабелів з ПЕОМ, яка з'єднана з блоком керування. Суть корисної моделі пояснюється кресленням, де зображена схема пристрою для контролю негабаритності вантажу транспортного засобу. Пристрій для контролю негабаритності вантажу транспортного засобу містить П-подібні ворота 1, що розташовані над рейковим шляхом і складаються з двох паралельно розташованих вертикальних стійок 2 і 3 і поперечки 4, що з'єднує їх у верхній частині. На вертикальній стійці 2 встановлена каретка 5, на якій закріплені датчик контролю положення каретки 6 та датчик контролю негабаритності вантажу 7. Каретка 5 обладнана приводом переміщення вздовж вертикальної стійки 2, який складається із лебідки 8 та електропривода 9. Переміщення каретки 5 вздовж вертикальної стійки 2 обмежено кінцевими вимикачами 10 та 11. На вертикальній стійці 3 встановлена каретка 12, на якій закріплено датчик контролю положення каретки 13 та датчик контролю негабаритності вантажу 14. Каретка 12 обладнана приводом переміщення вздовж вертикальної стійки 3, який складається із лебідки 15 та електропривода 16. Переміщення каретки 12 вздовж вертикальної стійки 3 обмежено кінцевими вимикачами 17 та 18. На поперечці 4 встановлено самохідний візок 19, на якому розміщені датчик контролю положення самохідного візка 20 та датчик контролю негабаритності вантажу 21. Переміщення самохідного візка 19 обмежено кінцевими вимикачами 22 та 23. Кінцеві вимикачі 10, 11, 17, 18, 22 та 23 пов'язані з блоком керування 24 кареток 5, 12 та самохідного візка 19, за допомогою вимірювальних кабелів 25. Блок керування 24 з'єднаний з ПЕОМ 26, яка зв'язана з датчиками контролю положення кареток 6 й 13, самохідного візка 20, та датчиками контролю негабаритності вантажу 7, 14 та 21 за допомогою з'єднувальних кабелів 27. Пристрій для контролю негабаритності вантажу транспортного засобу працює таким чином. Перед операцією контролю габариту рухомого складу, оператор ПЕОМ вмикає апаратуру пристрою для прогріву й виходу на робочий режим. Після чого вводить в пам'ять ПЕОМ 25 службову інформацію: номер поїзду, швидкість поїзда, що проходить через П-подібні ворота 1, дату й час, а також вихідні дані габариту контрольованого залізничного вагона з розміром пронумерованої точки габариту. Потім поїзд вагонів з вантажем подається в зону контролю. При цьому навантажені вагони зі швидкістю не більше 10 км у годину проходять через П - подібні ворота 1. Геометричні параметри профілю у верхній частині виміряються датчиком контролю негабаритності вантажу 21, розташованого на самохідному візку 19 разом з датчиком контролю положення цього самохідного візка. Самохідний візок 19 переміщується уздовж поперечки 4. Переміщення самохідного візка 19 обмежено кінцевими вимикачами 22 і 23, які встановлені з урахуванням габариту контрольованого вагона. Виходи кінцевих вимикачів 22 і 23 за допомогою вимірювальних кабелів 26 пов'язані із блоком керування 24, який керує переміщенням самохідного візка 19. Одночасно з контролем габариту у верх 5 ній частині вагона відбувається й контроль габариту вагона з обох боків: з лівого та правого. При цьому датчик контролю негабаритності вантажу 7, установлений разом з датчиком контролю положення каретки 8, на каретці 5 виконує вимір точок з лівого боку контуру бічної поверхні контрольованого вагона. Каретка 5 за допомогою лебідки 8 і електропривода 9 переміщується нагору уздовж вертикальної стійки 2. При цьому датчик контролю негабаритності вантажу 7, переміщуючись нагору, виконує вимір з лівого боку всього контуру бічної поверхні контрольованого вагона. Переміщення каретки 5 по вертикальній стійці 2 обмежено кінцевими вимикачами 10 і 11, установленими з урахуванням габариту контрольованого вагона. Виходи кінцевих вимикачів 10 і 11 за допомогою вимірювальних кабелів 26 пов'язані із блоком керування 24, який керує переміщенням каретки 5. Датчик контролю негабаритності вантажу 14, установлений разом з датчиком контролю положення каретки 13, на каретці 12 виконує вимір точок з правого боку всього контуру бічної поверхні контрольованого вагона. Каретка 12, за допомогою лебідки 15 і електропривода 16 переміщується уздовж вертикальної стійки 3, нагору. При цьому датчик контролю негабаритності вантажу 14, переміщуючись нагору, виконує вимір з правого боку всього контуру бічної поверхні контрольованого вагона. Переміщення каретки 12, а, отже, і датчика контролю Комп’ютерна верстка А. Крижанівський 65962 6 негабаритності вантажу 14 обмежено кінцевими вимикачами 17 і 18, установленими на вертикальній стійці 3 з урахуванням габариту контрольованого вагона. Виходи кінцевих вимикачів 10 і 11 за допомогою вимірювальних кабелів 26 пов'язані з блоком керування 24, що керує переміщенням каретки 12. Дані виміру датчиків контролю негабаритності вантажу 7, 14 і 21, а також дані виміру датчиків контролю положення кареток і самохідного візка 6, 13 і 20 надходять за допомогою з'єднувальних кабелів 27 у ПЕОМ 25, де відбувається обробка й аналіз отриманих даних. Крім того, ПЕОМ відображає на відеомоніторі вихідні дані й результати виміру, показує миготливим світлом на відеомоніторі відхилення в розмірах координатно-просторових точок поверхні профілю контрольованого залізничного вагона від зазначених числових значень, наведених у габаритному кресленні, виконує діагностику працездатності датчиків контролю негабаритності вантажу й електроустаткування, виконує режимне керування електроприводів лебідок кареток й самохідного візка, веде архів даних з результатами виміру по кожному контрольованому залізничному вагону й виводять інформацію за запитом диспетчера. Застосування пропонованого технічного рішення дозволить спростити конструкцію пристрою для контролю негабаритності вантажу транспортних засобів і підвищити зручність її експлуатації. Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for control of cargo oversize of vehicle
Автори англійськоюHanin Mykhailo Pavlovych, Teslenko Dmytro Oleksandrovych, Korostashevskyi Pavlo Volodymyrovych
Назва патенту російськоюУстройство для контроля негабаритности груза транспортных средств
Автори російськоюГанин Михаил Павлович, Тесленко Дмитрий Александрович, Коросташевский Павел Владимирович
МПК / Мітки
МПК: B61K 9/02
Мітки: негабаритності, пристрій, вантажу, транспортних, засобів, контролю
Код посилання
<a href="https://ua.patents.su/3-65962-pristrijj-dlya-kontrolyu-negabaritnosti-vantazhu-transportnikh-zasobiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для контролю негабаритності вантажу транспортних засобів</a>
Пристрій для обмеження розгойдувань вантажу, підвішеного до візка крана
Номер патенту: 30454
Опубліковано: 25.02.2008
Автори: Ловейкін Вячеслав Сергійович, Ярошенко Володимир Федорович, Ромасевич Юрій Олександрович
МПК: B66C 13/04
Мітки: обмеження, крана, підвішеного, візка, вантажу, розгойдувань, пристрій
Формула / Реферат:
Пристрій для обмеження розгойдувань вантажу, підвішеного до візка крана, що містить електропривід візка, датчик ваги вантажу, регулятор швидкості візка, джерело постійної напруги, який відрізняється тим, що обладнаний датчиком довжини каната, який підключений до першого входу блока-формувача часу розгону візка, з можливістю надходження на його другий вхід сигналу від блока-формувача номінальної швидкості візка, таймером, приєднаним до блока...
Система контролю маршрутів рухання наземних транспортних засобів
Номер патенту: 52943
Опубліковано: 15.01.2003
Автори: Демидов Олександр Григорович, Олексієнко Олег Володимирович, Вишневський Юрій Олександрович, Костусяк Віктор Семенович
МПК: G01C 21/26, G01C 7/00, G01C 21/34
Мітки: наземних, маршрутів, контролю, засобів, транспортних, рухання, система
Формула / Реферат:
Система контролю маршрутів рухання наземних транспортних засобів, яка містить в собі приймач сигналів від супутників GPS-ГЛОНАСС, обладнаний антеною для приймання сигналів і разом з антеною встановлений в кожному підконтрольному наземному транспортному засобі, а також окремо розташований блок обробки здобутої інформації, включаючий стаціонарний комп'ютер, яка відрізняється тим, що на кожному підконтрольному наземному транспортному засобі...
Спосіб контролю зовнішньої гальмової системи залізничних транспортних засобів
Номер патенту: 60725
Опубліковано: 15.10.2003
Автори: Семенюк Михайло Йосипович, Спіцин Василь Олександрович, Демченко Олександр Васильович
МПК: B60T 17/18
Мітки: гальмової, контролю, спосіб, системі, транспортних, зовнішньої, залізничних, засобів
Формула / Реферат:
Спосіб контролю зовнішньої гальмової системи залізничних транспортних засобів, що включає операції визначення навантаження на вісь, ухилу елемента профілю колії до площини, швидкості і кута атаки вітру з наступним визначенням сили зовнішньої гальмової системи і відповідно засобів закріплення із силою, що дорівнює силі зовнішньої гальмової системи, який відрізняється тим, що попередньо задають інтервал часу, через який визначають силу...
Пристрій кондиціонування повітря для транспортних засобів
Номер патенту: 44514
Опубліковано: 15.02.2002
Автори: Козак Олег Володимирович, Бачок Олег Сергійович, Драпак Георгій Мефодіович
МПК: B60H 3/00
Мітки: повітря, транспортних, пристрій, кондиціонування, засобів
Формула / Реферат:
Пристрій кондиціонування повітря для транспортних засобів оснащений повітропроводом для подачі повітря до салону транспортних засобів, вентилятором, теплообмінником, датчиком сумарної швидкості транспортного засобу і вітру, відрізняється тим, що датчик сумарної швидкості транспортного засобу і вітру розташовано у повітропроводі, який керує продуктивністю роботи вентилятора.
Установка для контролю навантаження в здвоєних шинах коліс транспортних засобів
Номер патенту: 51319
Опубліковано: 12.07.2010
Автори: Подригало Михайло Абович, Абдулгазіс Азіз Умерович, Аврунін Григорий Авраамович, Феватов Сададін Асанович, Абдулгазіс Умер Абдуллаевич
МПК: G01M 17/02
Мітки: засобів, коліс, навантаження, транспортних, установка, шинах, контролю, здвоєних
Формула / Реферат:
Установка для контролю навантаження в здвоєних шинах коліс транспортного засобу, що містить раму з доріжками для наїзду здвоєних коліс, установленими з можливістю повороту у вертикальних площинах, на кожній з яких закріплена листова пружина, з'єднана з натискним гвинтом, і упор, яким вона опирається на раму, а також індикаторний вимірник, шток якого опирається на листову пружину, яка відрізняється тим, що доріжки виконані у вигляді клавіш,...
Попередній патент: Спосіб тактильної терапії дітей, хворих аутизмом і парааутичними розладами
Наступний патент: Спосіб генотипування свиней за геном гормону росту по bsuri-поліморфному сайту рестрикції
Випадковий патент: Спосіб полімеразної ланцюгової реакції у режимі реального часу для діагностики африканської чуми свиней