Крокуючий рушій малогабаритного робота
Номер патенту: 75991
Опубліковано: 15.06.2006
Автори: Шевченко Анатолій Іванович, Полівцев Сергій Олександрович

Формула / Реферат
1. Крокуючий рушій малогабаритного робота, що містить корпус, у якому розташовані рівнобіжні привідні осі, крокуючі стопи, що розташовані на протилежних боках корпуса, який відрізняється тим, що у нього введені перший електродвигун, на валу якого розташований перший редуктор, на виході якого установлена ведуча шестірня, сполучена з веденими шестернями, жорстко з'єднаними з привідними рівнобіжними осями, на кінцях яких розташовані кривошипи, на вихідних осях яких у підшипниках установлені крокуючі стопи, а також у геометричному центрі корпуса розташований вал вертикального повороту, що через другий редуктор з'єднаний із другим електродвигуном, а до виходів вала вертикального повороту жорстко із зазором відносно корпуса кріпляться верхня і нижня поворотні платформи, під якими у верхній і нижній поверхнях корпуса радіально рівномірно в пазах установлені N опорних підшипників, причому N³4.
2. Крокуючий рушій малогабаритного робота за п. 1, який відрізняється тим, що поворотні платформи мають симетричну форму.
3. Крокуючий рушій малогабаритного робота за п. 1, який відрізняється тим, що висота крокуючих стоп дорівнює висоті корпуса.
Текст
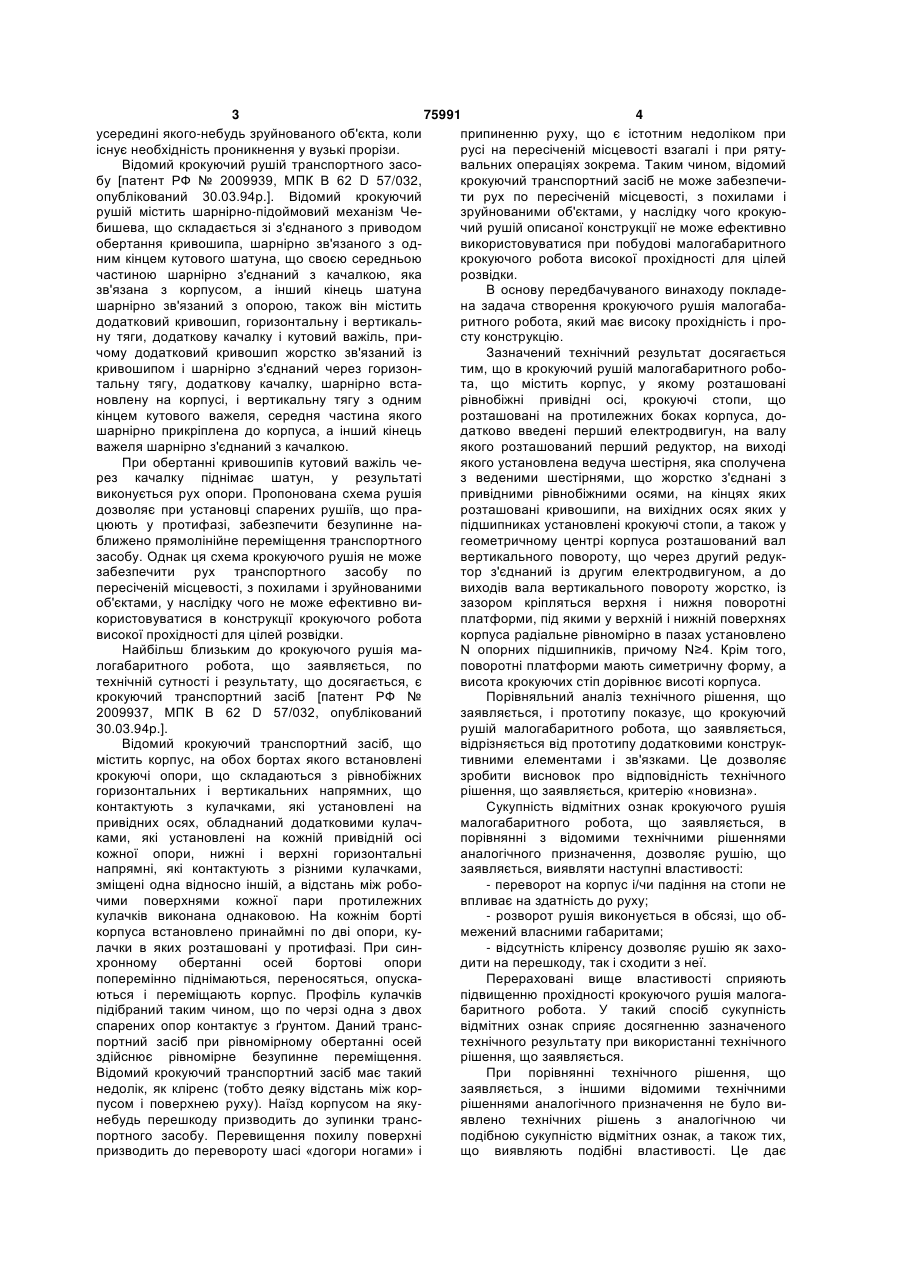
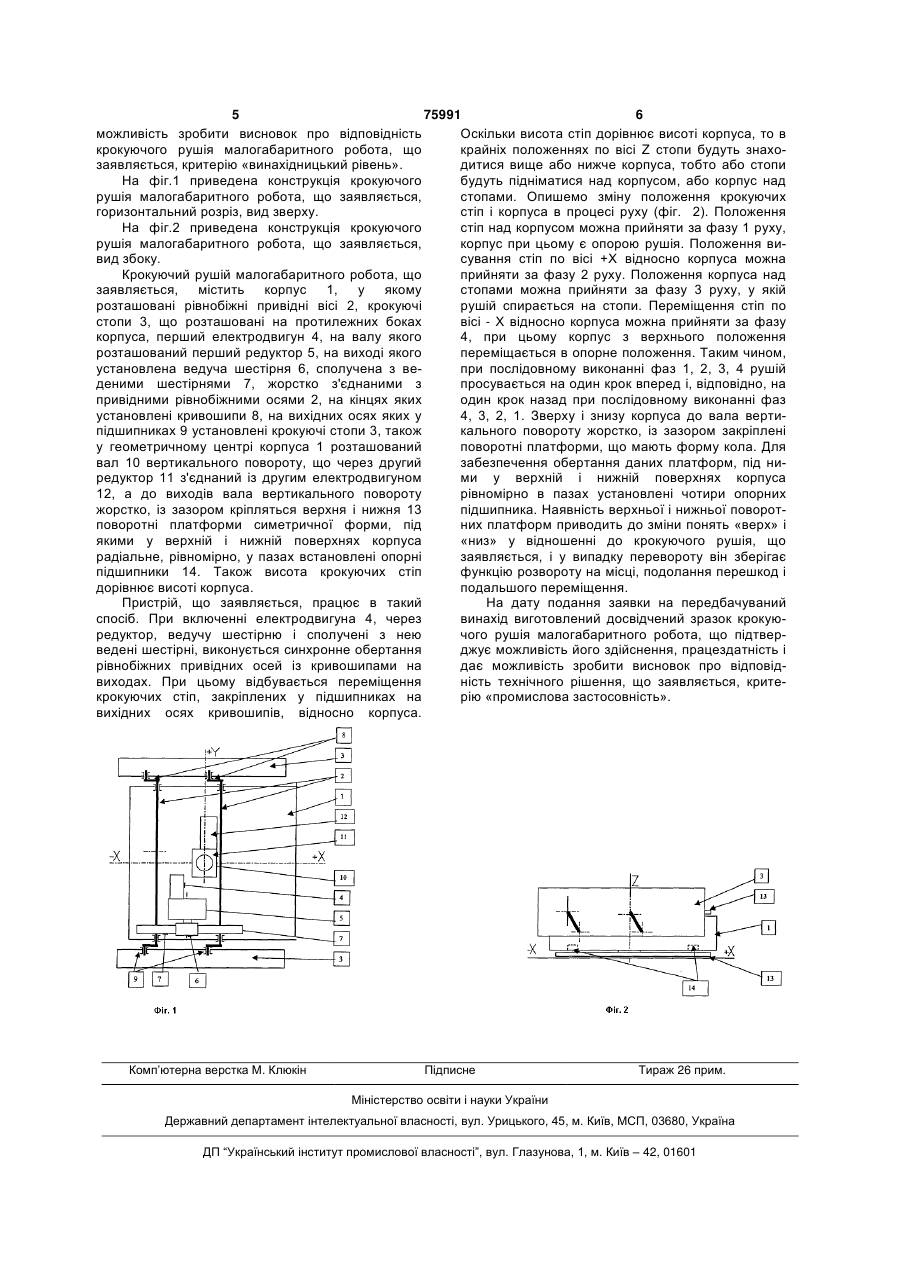
1. Крокуючий рушій малогабаритного робота, що містить корпус, у якому розташовані рівнобіжні привідні осі, крокуючі стопи, що розташовані на протилежних боках корпуса, який відрізняється тим, що у нього введені перший електродвигун, на валу якого розташований перший редуктор, на C2 2 (19) 1 3 75991 4 усередині якого-небудь зруйнованого об'єкта, коли припиненню руху, що є істотним недоліком при існує необхідність проникнення у вузькі прорізи. русі на пересіченій місцевості взагалі і при рятуВідомий крокуючий рушій транспортного засовальних операціях зокрема. Таким чином, відомий бу [патент РФ № 2009939, МПК В 62 D 57/032, крокуючий транспортний засіб не може забезпечиопублікований 30.03.94p.]. Відомий крокуючий ти рух по пересіченій місцевості, з похилами і рушій містить шарнірно-підоймовий механізм Чезруйнованими об'єктами, у наслідку чого крокуюбишева, що складається зі з'єднаного з приводом чий рушій описаної конструкції не може ефективно обертання кривошипа, шарнірно зв'язаного з одвикористовуватися при побудові малогабаритного ним кінцем кутового шатуна, що своєю середньою крокуючого робота високої прохідності для цілей частиною шарнірно з'єднаний з качалкою, яка розвідки. зв'язана з корпусом, а інший кінець шатуна В основу передбачуваного винаходу покладешарнірно зв'язаний з опорою, також він містить на задача створення крокуючого рушія малогабадодатковий кривошип, горизонтальну і вертикальритного робота, який має високу прохідність і прону тяги, додаткову качалку і кутовий важіль, присту конструкцію. чому додатковий кривошип жорстко зв'язаний із Зазначений технічний результат досягається кривошипом і шарнірно з'єднаний через горизонтим, що в крокуючий рушій малогабаритного роботальну тягу, додаткову качалку, шарнірно встата, що містить корпус, у якому розташовані новлену на корпусі, і вертикальну тягу з одним рівнобіжні привідні осі, крокуючі стопи, що кінцем кутового важеля, середня частина якого розташовані на протилежних боках корпуса, дошарнірно прикріплена до корпуса, а інший кінець датково введені перший електродвигун, на валу важеля шарнірно з'єднаний з качалкою. якого розташований перший редуктор, на виході При обертанні кривошипів кутовий важіль чеякого установлена ведуча шестірня, яка сполучена рез качалку піднімає шатун, у результаті з веденими шестірнями, що жорстко з'єднані з виконується рух опори. Пропонована схема рушія привідними рівнобіжними осями, на кінцях яких дозволяє при установці спарених рушіїв, що прарозташовані кривошипи, на вихідних осях яких у цюють у протифазі, забезпечити безупинне напідшипниках установлені крокуючі стопи, а також у ближено прямолінійне переміщення транспортного геометричному центрі корпуса розташований вал засобу. Однак ця схема крокуючого рушія не може вертикального повороту, що через другий редукзабезпечити рух транспортного засобу по тор з'єднаний із другим електродвигуном, а до пересіченій місцевості, з похилами і зруйнованими виходів вала вертикального повороту жорстко, із об'єктами, у наслідку чого не може ефективно визазором кріпляться верхня і нижня поворотні користовуватися в конструкції крокуючого робота платформи, під якими у верхній і нижній поверхнях високої прохідності для цілей розвідки. корпуса радіальне рівномірно в пазах установлено Найбільш близьким до крокуючого рушія маN опорних підшипників, причому N≥4. Крім того, логабаритного робота, що заявляється, по поворотні платформи мають симетричну форму, а технічній сутності і результату, що досягається, є висота крокуючих стіп дорівнює висоті корпуса. крокуючий транспортний засіб [патент РФ № Порівняльний аналіз технічного рішення, що 2009937, МПК В 62 D 57/032, опублікований заявляється, і прототипу показує, що крокуючий 30.03.94p.]. рушій малогабаритного робота, що заявляється, Відомий крокуючий транспортний засіб, що відрізняється від прототипу додатковими конструкмістить корпус, на обох бортах якого встановлені тивними елементами і зв'язками. Це дозволяє крокуючі опори, що складаються з рівнобіжних зробити висновок про відповідність технічного горизонтальних і вертикальних напрямних, що рішення, що заявляється, критерію «новизна». контактують з кулачками, які установлені на Сукупність відмітних ознак крокуючого рушія привідних осях, обладнаний додатковими кулачмалогабаритного робота, що заявляється, в ками, які установлені на кожній привідній осі порівнянні з відомими технічними рішеннями кожної опори, нижні і верхні горизонтальні аналогічного призначення, дозволяє рушію, що напрямні, які контактують з різними кулачками, заявляється, виявляти наступні властивості: зміщені одна відносно іншій, а відстань між робо- переворот на корпус і/чи падіння на стопи не чими поверхнями кожної пари протилежних впливає на здатність до руху; кулачків виконана однаковою. На кожнім борті - розворот рушія виконується в обсязі, що обкорпуса встановлено принаймні по дві опори, кумежений власними габаритами; лачки в яких розташовані у протифазі. При син- відсутність кліренсу дозволяє рушію як захохронному обертанні осей бортові опори дити на перешкоду, так і сходити з неї. поперемінно піднімаються, переносяться, опускаПерераховані вище властивості сприяють ються і переміщають корпус. Профіль кулачків підвищенню прохідності крокуючого рушія малогапідібраний таким чином, що по черзі одна з двох баритного робота. У такий спосіб сукупність спарених опор контактує з ґрунтом. Даний трансвідмітних ознак сприяє досягненню зазначеного портний засіб при рівномірному обертанні осей технічного результату при використанні технічного здійснює рівномірне безупинне переміщення. рішення, що заявляється. Відомий крокуючий транспортний засіб має такий При порівнянні технічного рішення, що недолік, як кліренс (тобто деяку відстань між корзаявляється, з іншими відомими технічними пусом і поверхнею руху). Наїзд корпусом на якурішеннями аналогічного призначення не було винебудь перешкоду призводить до зупинки трансявлено технічних рішень з аналогічною чи портного засобу. Перевищення похилу поверхні подібною сукупністю відмітних ознак, а також тих, призводить до перевороту шасі «догори ногами» і що виявляють подібні властивості. Це дає 5 75991 6 можливість зробити висновок про відповідність Оскільки висота стіп дорівнює висоті корпуса, то в крокуючого рушія малогабаритного робота, що крайніх положеннях по вісі Z стопи будуть знахозаявляється, критерію «винахідницький рівень». дитися вище або нижче корпуса, тобто або стопи На фіг.1 приведена конструкція крокуючого будуть підніматися над корпусом, або корпус над рушія малогабаритного робота, що заявляється, стопами. Опишемо зміну положення крокуючих горизонтальний розріз, вид зверху. стіп і корпуса в процесі руху (фіг. 2). Положення На фіг.2 приведена конструкція крокуючого стіп над корпусом можна прийняти за фазу 1 руху, рушія малогабаритного робота, що заявляється, корпус при цьому є опорою рушія. Положення вивид збоку. сування стіп по вісі +Х відносно корпуса можна Крокуючий рушій малогабаритного робота, що прийняти за фазу 2 руху. Положення корпуса над заявляється, містить корпус 1, у якому стопами можна прийняти за фазу 3 руху, у якій розташовані рівнобіжні привідні вісі 2, крокуючі рушій спирається на стопи. Переміщення стіп по стопи 3, що розташовані на протилежних боках вісі - Х відносно корпуса можна прийняти за фазу корпуса, перший електродвигун 4, на валу якого 4, при цьому корпус з верхнього положення розташований перший редуктор 5, на виході якого переміщається в опорне положення. Таким чином, установлена ведуча шестірня 6, сполучена з вепри послідовному виконанні фаз 1, 2, 3, 4 рушій деними шестірнями 7, жорстко з'єднаними з просувається на один крок вперед і, відповідно, на привідними рівнобіжними осями 2, на кінцях яких один крок назад при послідовному виконанні фаз установлені кривошипи 8, на вихідних осях яких у 4, 3, 2, 1. Зверху і знизу корпуса до вала вертипідшипниках 9 установлені крокуючі стопи 3, також кального повороту жорстко, із зазором закріплені у геометричному центрі корпуса 1 розташований поворотні платформи, що мають форму кола. Для вал 10 вертикального повороту, що через другий забезпечення обертання даних платформ, під ниредуктор 11 з'єднаний із другим електродвигуном ми у верхній і нижній поверхнях корпуса 12, а до виходів вала вертикального повороту рівномірно в пазах установлені чотири опорних жорстко, із зазором кріпляться верхня і нижня 13 підшипника. Наявність верхньої і нижньої поворотповоротні платформи симетричної форми, під них платформ приводить до зміни понять «верх» і якими у верхній і нижній поверхнях корпуса «низ» у відношенні до крокуючого рушія, що радіальне, рівномірно, у пазах встановлені опорні заявляється, і у випадку перевороту він зберігає підшипники 14. Також висота крокуючих стіп функцію розвороту на місці, подолання перешкод і дорівнює висоті корпуса. подальшого переміщення. Пристрій, що заявляється, працює в такий На дату подання заявки на передбачуваний спосіб. При включенні електродвигуна 4, через винахід виготовлений досвідчений зразок крокуюредуктор, ведучу шестірню і сполучені з нею чого рушія малогабаритного робота, що підтверведені шестірні, виконується синхронне обертання джує можливість його здійснення, працездатність і рівнобіжних привідних осей із кривошипами на дає можливість зробити висновок про відповідвиходах. При цьому відбувається переміщення ність технічного рішення, що заявляється, критекрокуючих стіп, закріплених у підшипниках на рію «промислова застосовність». вихідних осях кривошипів, відносно корпуса. Комп’ютерна верстка М. Клюкін Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюStepping propeller of small-size robot
Автори англійськоюShevchenko Anatolii Ivanovych, Polivtsev Serhii Oleksandrovych
Назва патенту російськоюШагающий движитель малогабаритного робота
Автори російськоюШевченко Анатолий Иванович, Поливцев Сергей Александрович
МПК / Мітки
МПК: B25J 11/00, B62D 57/00
Мітки: робота, крокуючий, рушій, малогабаритного
Код посилання
<a href="https://ua.patents.su/3-75991-krokuyuchijj-rushijj-malogabaritnogo-robota.html" target="_blank" rel="follow" title="База патентів України">Крокуючий рушій малогабаритного робота</a>
Крокуючий всюдихід
Номер патенту: 52663
Опубліковано: 15.01.2003
Автори: Огородник Станіслав Станіславович, Верхман Олександр Аркадійович, Верхман Ілля Олександрович
МПК: B65G 25/00, B62D 57/00
Формула / Реферат:
1. Крокуючий всюдихід, який має корпус-балку, вантажну кабіну, дві або більше число пересувних ніг-опор, кожна з яких має три або більше число опорних лап, які спираються на дорогу, механізм, здатний пересувати ноги-опори вздовж корпуса-балки, механізм в кожній нозі-опорі, здатний повертати ногу-опору навколо своєї осі і змінювати кут між корпусом-балкою і ногою-опорою, а також силовий механізм в кожній нозі-опорі, здатний зводити і розводити...
Електромагнітний рушій
Номер патенту: 6818
Опубліковано: 16.05.2005
Автори: Родин Сергій Геннадійович, Сакун Микола Юхимович, Жиленко Валерій Дмитрович, Старик Іван Карпович
МПК: H02K 33/00
Мітки: електромагнітний, рушій
Формула / Реферат:
1. Електромагнітний рушій, що включає корпус, в якому розташовані електромагніт з обмоткою і рухомим якорем та пружину оберненої дії, що встановлена з можливістю взаємодії з якорем та корпусом, а обмотка електромагніта має клеми для її підключення через вимикач до блоку живлення, який відрізняється тим, що електромагнітний рушій виконаний у вигляді ланцюга, який включає щонайменше два електромагніти, а корпус кожного попереднього...
Роторно-гвинтовий рушій

Номер патенту: 12583
Опубліковано: 11.10.1999
Автор: Синельник Анатолій Іванович
МПК: F01C 1/00, B64C 11/00
Мітки: рушій, роторно-гвинтовий
Формула / Реферат:
Роторно-гнинтовинй рушій, що містить ведучий вал і ротори, які з'єднані зі втулкою з можливістю вільного обертання відносно осей симетрії роторів і радіально розташовані відносно ведучого валу, який відрізняється тим, що ведучий вал з'єднаний зі втулкою з можливістю вільного обертання відносно втулки, а ротори зв'язані з ведучим валом механічними передачами.
Ванна для дезактивації малогабаритного обладнання
Номер патенту: 66470
Опубліковано: 17.05.2004
Автор: Гавриш Володимир Михайлович
МПК: G21F 9/00
Мітки: ванна, малогабаритного, обладнання, дезактивації
Формула / Реферат:
Ванна для дезактивації малогабаритного устаткування, що містить днище і циліндричний корпус із кришкою, яка відрізняється тим, що корпус ванни містить регулюючий і дренажний вентилі, а також катод з клемою для підключення до джерела електричного струму, при цьому регулюючий клапан через штуцер з'єднаний з паровою магістраллю і змійовиком, розміщеним по днищу ванни.
Крокуючий транспортний пристрій

Номер патенту: 72178
Опубліковано: 15.02.2005
Автор: Григор'єв Сергій Васильович
МПК: B62D 57/00
Мітки: пристрій, крокуючий, транспортний
Формула / Реферат:
1. Крокуючий транспортний пристрій, що містить корпус, дві опори і механізм повороту, який відрізняється тим, що опори розташовані відповідно праворуч та ліворуч від корпусу і з'єднані з встановленими у передній частині корпусу циліндричними шарнірами, поздовжні осі яких лежать на одній горизонтальній прямій лінії, а механізм повороту виконаний у вигляді двох з'єднаних з корпусом опорних майданчиків, що розташовані відповідно вище та нижче...
Попередній патент: Установка для електрогідроімпульсного дроблення та подрібнення матеріалів
Наступний патент: Установка автоматичного пожежогасіння
Випадковий патент: Спосіб визначення зносостійкості задрукованого та оздобленого зображення