Привід рукавичного автомата
Номер патенту: 102929
Опубліковано: 25.11.2015

Формула / Реферат
Привід рукавичного автомата, що містить електродвигун, з'єднаний за допомогою механічних передач з ланцюговою передачею з закріпленим на ній повзуном, проміжну каретку з встановленим в ній пальцем, з'єднану з повзуном, та в'язальну каретку, з'єднану з проміжною кареткою за допомогою пальця, який відрізняється тим, що додатково обладнаний двома циліндричними пружинами стиску, кожна з яких встановлена по різні сторони від в'язальної каретки, та електромагнітом, з'єднаним з пальцем, причому палець встановлено з можливістю осьового переміщення.
Текст
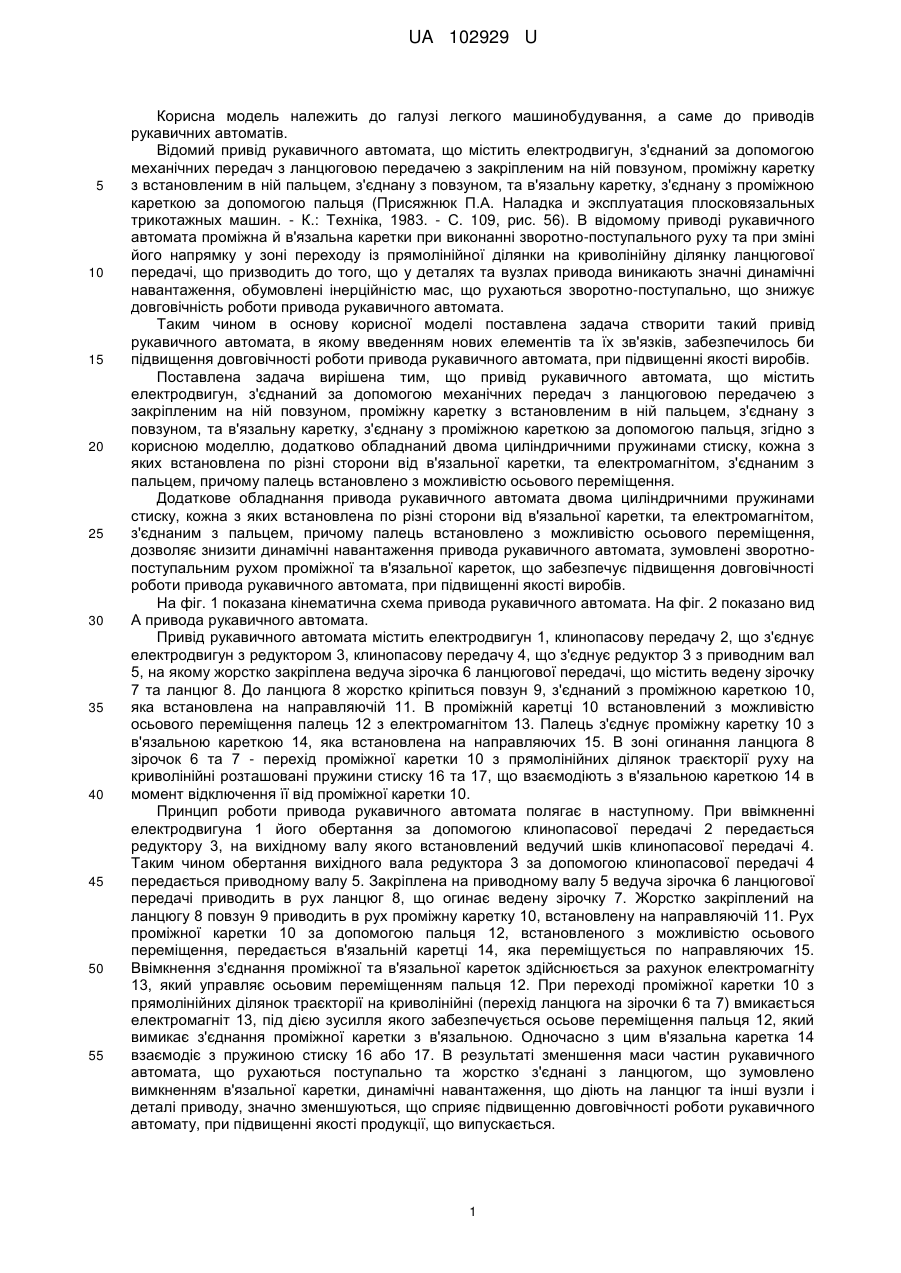
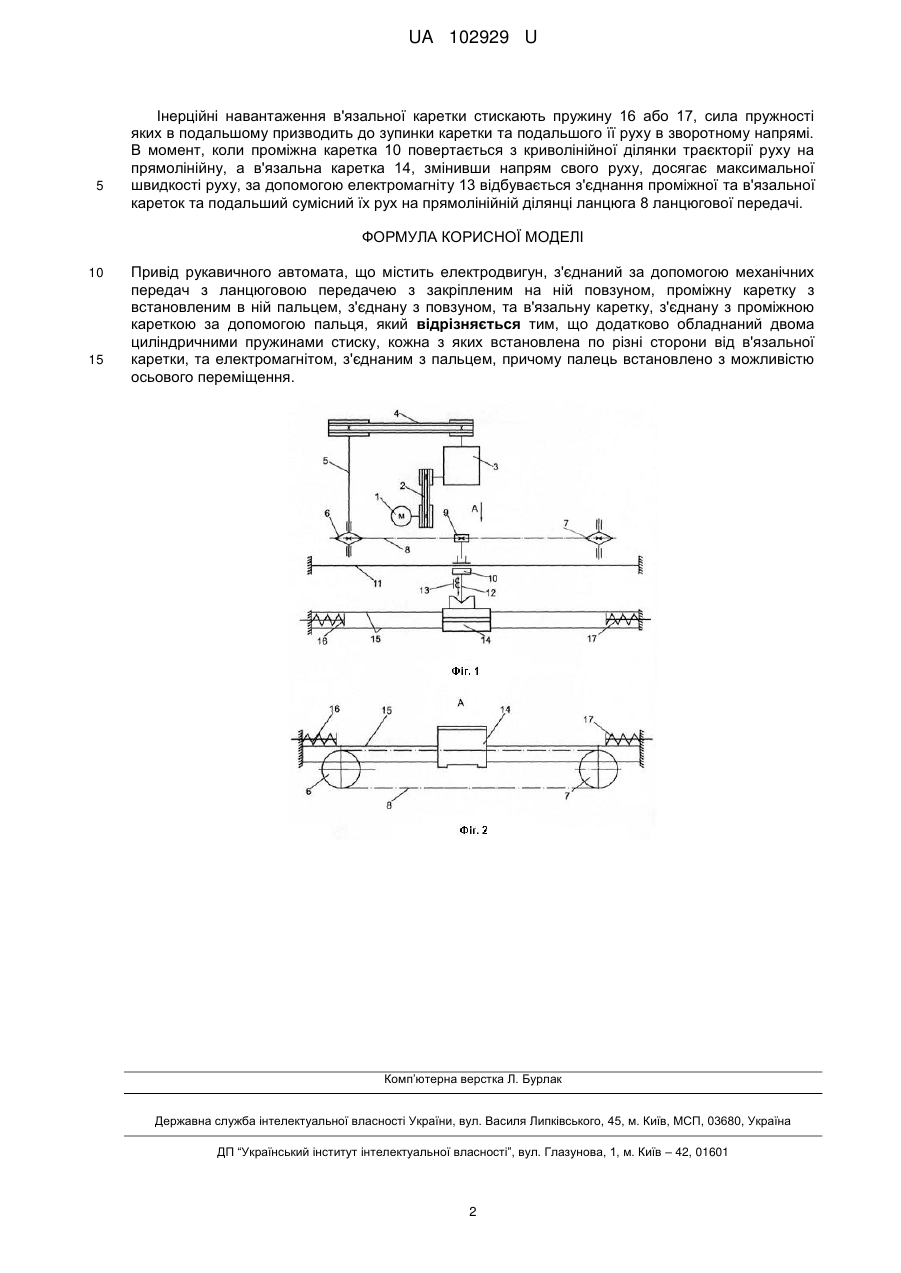
Реферат: UA 102929 U UA 102929 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі легкого машинобудування, а саме до приводів рукавичних автоматів. Відомий привід рукавичного автомата, що містить електродвигун, з'єднаний за допомогою механічних передач з ланцюговою передачею з закріпленим на ній повзуном, проміжну каретку з встановленим в ній пальцем, з'єднану з повзуном, та в'язальну каретку, з'єднану з проміжною кареткою за допомогою пальця (Присяжнюк П.А. Наладка и эксплуатация плосковязальных трикотажных машин. - К.: Техніка, 1983. - С. 109, рис. 56). В відомому приводі рукавичного автомата проміжна й в'язальна каретки при виконанні зворотно-поступального руху та при зміні його напрямку у зоні переходу із прямолінійної ділянки на криволінійну ділянку ланцюгової передачі, що призводить до того, що у деталях та вузлах привода виникають значні динамічні навантаження, обумовлені інерційністю мас, що рухаються зворотно-поступально, що знижує довговічність роботи привода рукавичного автомата. Таким чином в основу корисної моделі поставлена задача створити такий привід рукавичного автомата, в якому введенням нових елементів та їх зв'язків, забезпечилось би підвищення довговічності роботи привода рукавичного автомата, при підвищенні якості виробів. Поставлена задача вирішена тим, що привід рукавичного автомата, що містить електродвигун, з'єднаний за допомогою механічних передач з ланцюговою передачею з закріпленим на ній повзуном, проміжну каретку з встановленим в ній пальцем, з'єднану з повзуном, та в'язальну каретку, з'єднану з проміжною кареткою за допомогою пальця, згідно з корисною моделлю, додатково обладнаний двома циліндричними пружинами стиску, кожна з яких встановлена по різні сторони від в'язальної каретки, та електромагнітом, з'єднаним з пальцем, причому палець встановлено з можливістю осьового переміщення. Додаткове обладнання привода рукавичного автомата двома циліндричними пружинами стиску, кожна з яких встановлена по різні сторони від в'язальної каретки, та електромагнітом, з'єднаним з пальцем, причому палець встановлено з можливістю осьового переміщення, дозволяє знизити динамічні навантаження привода рукавичного автомата, зумовлені зворотнопоступальним рухом проміжної та в'язальної кареток, що забезпечує підвищення довговічності роботи привода рукавичного автомата, при підвищенні якості виробів. На фіг. 1 показана кінематична схема привода рукавичного автомата. На фіг. 2 показано вид А привода рукавичного автомата. Привід рукавичного автомата містить електродвигун 1, клинопасову передачу 2, що з'єднує електродвигун з редуктором 3, клинопасову передачу 4, що з'єднує редуктор 3 з приводним вал 5, на якому жорстко закріплена ведуча зірочка 6 ланцюгової передачі, що містить ведену зірочку 7 та ланцюг 8. До ланцюга 8 жорстко кріпиться повзун 9, з'єднаний з проміжною кареткою 10, яка встановлена на направляючій 11. В проміжній каретці 10 встановлений з можливістю осьового переміщення палець 12 з електромагнітом 13. Палець з'єднує проміжну каретку 10 з в'язальною кареткою 14, яка встановлена на направляючих 15. В зоні огинання ланцюга 8 зірочок 6 та 7 - перехід проміжної каретки 10 з прямолінійних ділянок траєкторії руху на криволінійні розташовані пружини стиску 16 та 17, що взаємодіють з в'язальною кареткою 14 в момент відключення її від проміжної каретки 10. Принцип роботи привода рукавичного автомата полягає в наступному. При ввімкненні електродвигуна 1 його обертання за допомогою клинопасової передачі 2 передається редуктору 3, на вихідному валу якого встановлений ведучий шків клинопасової передачі 4. Таким чином обертання вихідного вала редуктора 3 за допомогою клинопасової передачі 4 передається приводному валу 5. Закріплена на приводному валу 5 ведуча зірочка 6 ланцюгової передачі приводить в рух ланцюг 8, що огинає ведену зірочку 7. Жорстко закріплений на ланцюгу 8 повзун 9 приводить в рух проміжну каретку 10, встановлену на направляючій 11. Рух проміжної каретки 10 за допомогою пальця 12, встановленого з можливістю осьового переміщення, передається в'язальній каретці 14, яка переміщується по направляючих 15. Ввімкнення з'єднання проміжної та в'язальної кареток здійснюється за рахунок електромагніту 13, який управляє осьовим переміщенням пальця 12. При переході проміжної каретки 10 з прямолінійних ділянок траєкторії на криволінійні (перехід ланцюга на зірочки 6 та 7) вмикається електромагніт 13, під дією зусилля якого забезпечується осьове переміщення пальця 12, який вимикає з'єднання проміжної каретки з в'язальною. Одночасно з цим в'язальна каретка 14 взаємодіє з пружиною стиску 16 або 17. В результаті зменшення маси частин рукавичного автомата, що рухаються поступально та жорстко з'єднані з ланцюгом, що зумовлено вимкненням в'язальної каретки, динамічні навантаження, що діють на ланцюг та інші вузли і деталі приводу, значно зменшуються, що сприяє підвищенню довговічності роботи рукавичного автомату, при підвищенні якості продукції, що випускається. 1 UA 102929 U 5 Інерційні навантаження в'язальної каретки стискають пружину 16 або 17, сила пружності яких в подальшому призводить до зупинки каретки та подальшого її руху в зворотному напрямі. В момент, коли проміжна каретка 10 повертається з криволінійної ділянки траєкторії руху на прямолінійну, а в'язальна каретка 14, змінивши напрям свого руху, досягає максимальної швидкості руху, за допомогою електромагніту 13 відбувається з'єднання проміжної та в'язальної кареток та подальший сумісний їх рух на прямолінійній ділянці ланцюга 8 ланцюгової передачі. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Привід рукавичного автомата, що містить електродвигун, з'єднаний за допомогою механічних передач з ланцюговою передачею з закріпленим на ній повзуном, проміжну каретку з встановленим в ній пальцем, з'єднану з повзуном, та в'язальну каретку, з'єднану з проміжною кареткою за допомогою пальця, який відрізняється тим, що додатково обладнаний двома циліндричними пружинами стиску, кожна з яких встановлена по різні сторони від в'язальної каретки, та електромагнітом, з'єднаним з пальцем, причому палець встановлено з можливістю осьового переміщення. Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюDrive of glove of automated device
Автори англійськоюPipa Borys Fedorovych, Chaban Oleksii Vitaliyovych
Назва патенту російськоюПривод перчаточного автомата
Автори російськоюПипа Борис Федорович, Чабан Алексей Витальевич
МПК / Мітки
МПК: D04B 15/96
Мітки: автомата, привід, рукавичного
Код посилання
<a href="https://ua.patents.su/4-102929-privid-rukavichnogo-avtomata.html" target="_blank" rel="follow" title="База патентів України">Привід рукавичного автомата</a>
Привід рукавичного автомата
Номер патенту: 98535
Опубліковано: 27.04.2015
Автори: Музичишин Сергій Володимирович, Піпа Борис Федорович
МПК: D04B 15/96
Мітки: рукавичного, привід, автомата
Формула / Реферат:
Привід рукавичного автомата, що містить електродвигун, з'єднаний за допомогою механічних передач з ланцюговою передачею з закріпленим на ній повзуном, проміжну каретку з встановленим в ній пальцем, з'єднану з повзуном, та в'язальну каретку, з'єднану з проміжною кареткою за допомогою пальця, який відрізняється тим, що додатково оснащений двома циліндричними пружинами стиску, кожна з яких встановлена по різні сторони від проміжної каретки з...
Привід в’язальної каретки рукавичного автомата
Номер патенту: 93984
Опубліковано: 27.10.2014
Автори: Чабан Олексій Віталійович, Піпа Борис Федорович
МПК: D04B 15/96
Мітки: рукавичного, привід, автомата, каретки, в'язальної
Формула / Реферат:
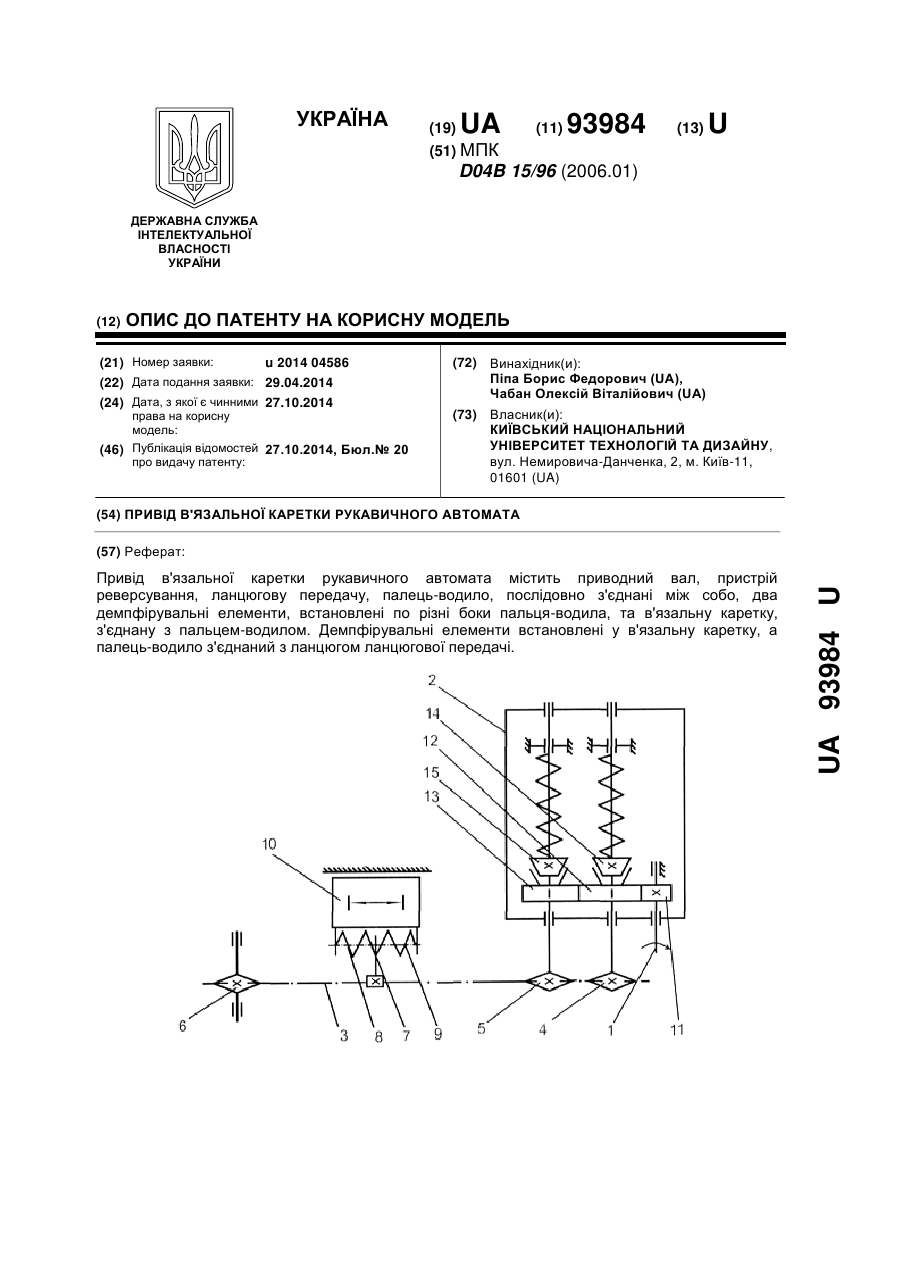
1. Привід в'язальної каретки рукавичного автомата, що містить приводний вал, пристрій реверсування, ланцюгову передачу, палець-водило, послідовно з'єднані між собою, два демпфірувальні елементи, встановлені по різні боки пальця-водила, та в'язальну каретку, з'єднану з пальцем-водилом, який відрізняється тим, що демпфірувальні елементи встановлені у в'язальну каретку, а палець-водило з'єднаний з ланцюгом ланцюгової передачі.2. Привід...
Привід рукавичного автомата
Номер патенту: 98249
Опубліковано: 27.04.2015
Автори: Піпа Борис Федорович, Чабан Олексій Віталійович, Музичишин Сергій Володимирович
МПК: D04B 15/16
Мітки: автомата, рукавичного, привід
Формула / Реферат:
Привід рукавичного автомата, що містить зв'язані між собою електродвигун, ланцюгову передачу, що містить ведучу, ведену зірочки та ланцюг, проміжну та в'язальну каретки з напрямними, з'єднані між собою, та пружину розтягу, встановлену в напрямній проміжної каретки з можливістю взаємодії з нею, причому проміжна каретка з'єднана з ланцюгом та в'язальною кареткою послідовно, який відрізняється тим, що додатково обладнаний двома пружинами...
Привід рукавичного автомата
Номер патенту: 94303
Опубліковано: 10.11.2014
Автори: Чабан Віталій Васильович, Піпа Борис Федорович, Чабан Олексій Віталійович
МПК: D04B 15/16, D04B 15/96
Мітки: рукавичного, привід, автомата
Формула / Реферат:
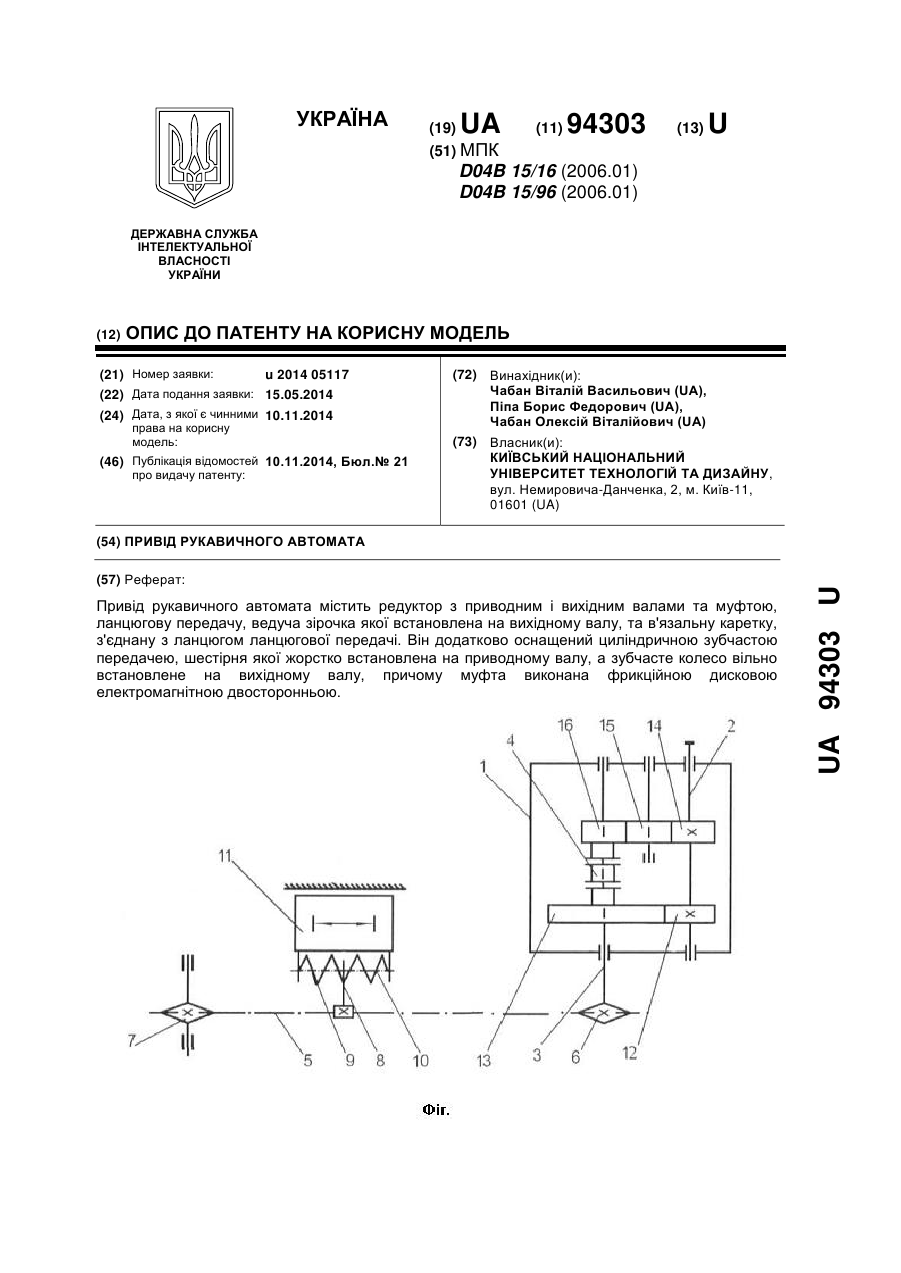
Привід рукавичного автомата, що містить редуктор з приводним і вихідним валами та муфтою, ланцюгову передачу, ведуча зірочка якої встановлена на вихідному валу, та в'язальну каретку, з'єднану з ланцюгом ланцюгової передачі, який відрізняється тим, що додатково оснащений циліндричною зубчастою передачею, шестірня якої жорстко встановлена на приводному валу, а зубчасте колесо вільно встановлене на вихідному валу, причому муфта виконана...
Привід рукавичного автомата
Номер патенту: 95880
Опубліковано: 12.01.2015
Автори: Піпа Борис Федорович, Музичишин Сергій Володимирович, Чабан Олексій Віталійович
МПК: D04B 15/16
Мітки: привід, автомата, рукавичного
Формула / Реферат:
Привід рукавичного автомата, що містить електродвигун, механічні передачі та привідний вал, кінематично з'єднані між собою, який відрізняється тим, що додатково обладнаний обгінною муфтою та мотор-редуктором, розташованим співвісно з електродвигуном та з'єднаним з ним за допомогою обгінної муфти.
Попередній патент: Привід в’язальної машини
Наступний патент: Відцентрова фрикційна муфта
Випадковий патент: Спосіб збереження скоротливості лівого шлуночка при протезуванні мітрального клапана