Привід рукавичного автомата
Номер патенту: 115682
Опубліковано: 25.04.2017

Формула / Реферат
Привід рукавичного автомата, що містить електродвигун, в'язальну каретку, кінематично зв'язані між собою, та дві пружини, встановлені по різні боки в'язальної каретки з можливістю притискання до неї, який відрізняється тим, що додатково обладнаний двома рухомими напрямними, в яких розташовані пружини, двома стержнями, кожен з яких містить різьбу, двома гайками, в які загвинчені стержні, та двома обмежувачами осьового переміщення гайок, при цьому стержні жорстко прикріплені до рухомих напрямних, а пружини виконані плоскими прямими.
Текст
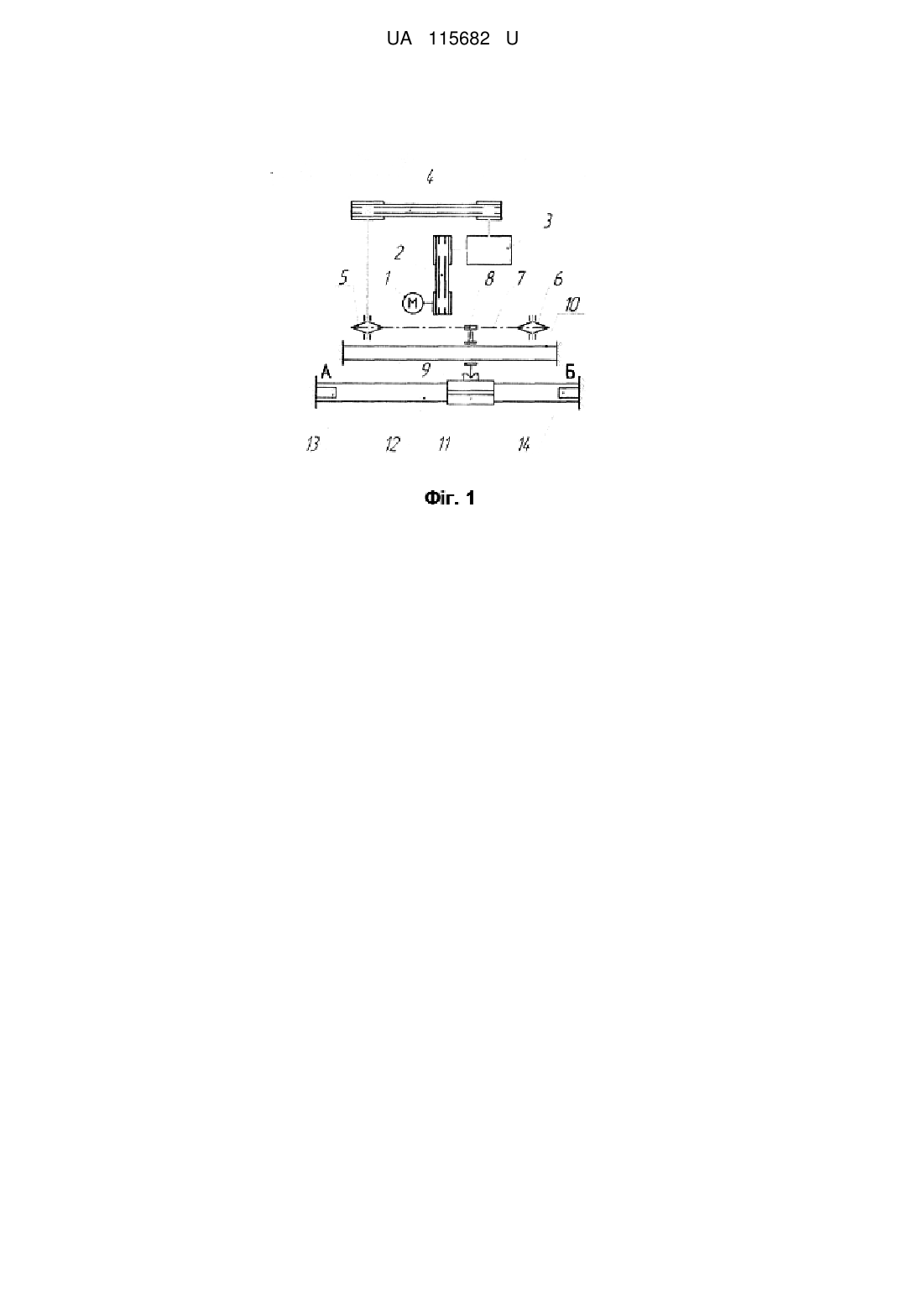
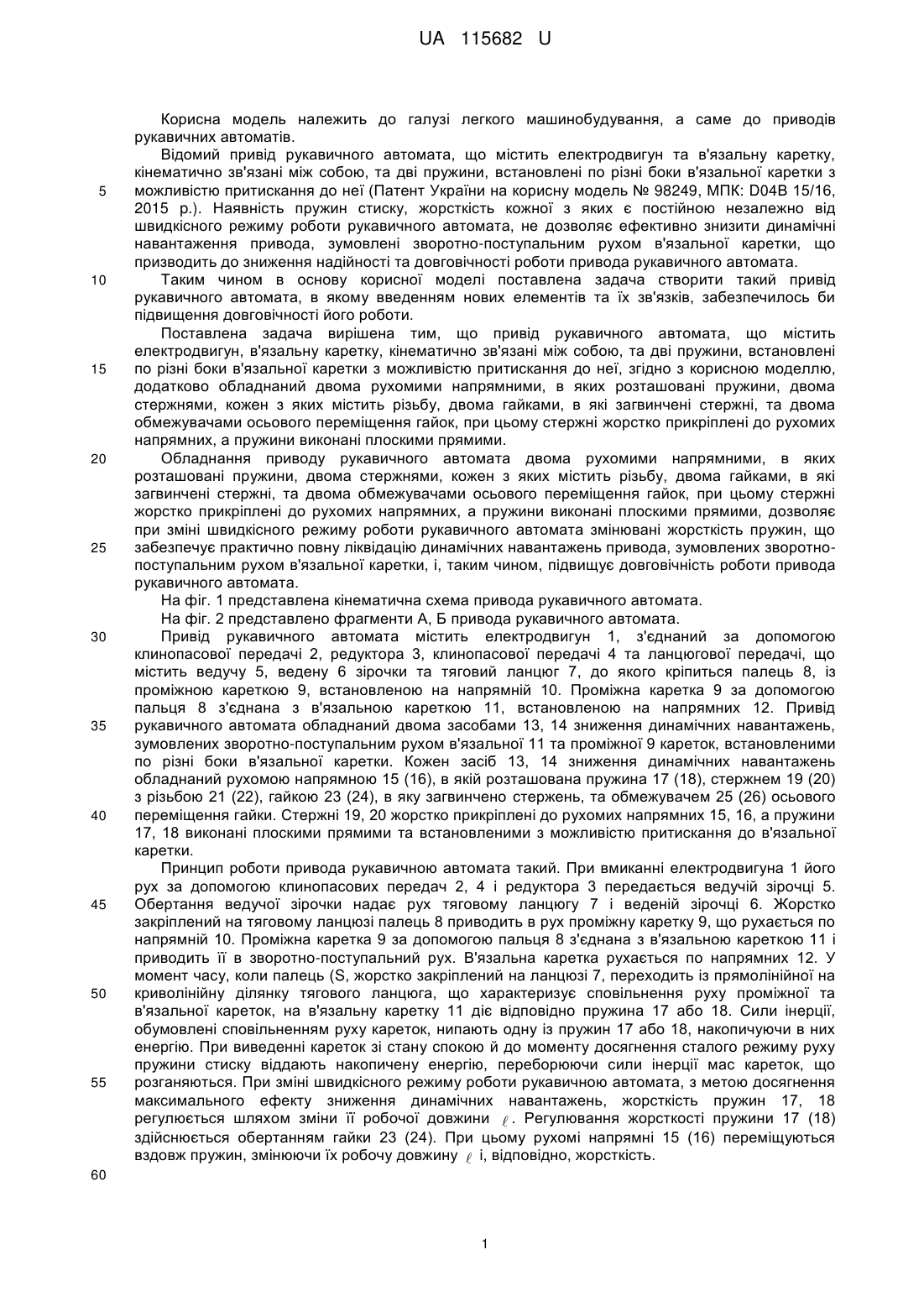
Реферат: UA 115682 U UA 115682 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі легкого машинобудування, а саме до приводів рукавичних автоматів. Відомий привід рукавичного автомата, що містить електродвигун та в'язальну каретку, кінематично зв'язані між собою, та дві пружини, встановлені по різні боки в'язальної каретки з можливістю притискання до неї (Патент України на корисну модель № 98249, МПК: D04В 15/16, 2015 p.). Наявність пружин стиску, жорсткість кожної з яких є постійною незалежно від швидкісного режиму роботи рукавичного автомата, не дозволяє ефективно знизити динамічні навантаження привода, зумовлені зворотно-поступальним рухом в'язальної каретки, що призводить до зниження надійності та довговічності роботи привода рукавичного автомата. Таким чином в основу корисної моделі поставлена задача створити такий привід рукавичного автомата, в якому введенням нових елементів та їх зв'язків, забезпечилось би підвищення довговічності його роботи. Поставлена задача вирішена тим, що привід рукавичного автомата, що містить електродвигун, в'язальну каретку, кінематично зв'язані між собою, та дві пружини, встановлені по різні боки в'язальної каретки з можливістю притискання до неї, згідно з корисною моделлю, додатково обладнаний двома рухомими напрямними, в яких розташовані пружини, двома стержнями, кожен з яких містить різьбу, двома гайками, в які загвинчені стержні, та двома обмежувачами осьового переміщення гайок, при цьому стержні жорстко прикріплені до рухомих напрямних, а пружини виконані плоскими прямими. Обладнання приводу рукавичного автомата двома рухомими напрямними, в яких розташовані пружини, двома стержнями, кожен з яких містить різьбу, двома гайками, в які загвинчені стержні, та двома обмежувачами осьового переміщення гайок, при цьому стержні жорстко прикріплені до рухомих напрямних, а пружини виконані плоскими прямими, дозволяє при зміні швидкісного режиму роботи рукавичного автомата змінювані жорсткість пружин, що забезпечує практично повну ліквідацію динамічних навантажень привода, зумовлених зворотнопоступальним рухом в'язальної каретки, і, таким чином, підвищує довговічність роботи привода рукавичного автомата. На фіг. 1 представлена кінематична схема привода рукавичного автомата. На фіг. 2 представлено фрагменти А, Б привода рукавичного автомата. Привід рукавичного автомата містить електродвигун 1, з'єднаний за допомогою клинопасової передачі 2, редуктора 3, клинопасової передачі 4 та ланцюгової передачі, що містить ведучу 5, ведену 6 зірочки та тяговий ланцюг 7, до якого кріпиться палець 8, із проміжною кареткою 9, встановленою на напрямній 10. Проміжна каретка 9 за допомогою пальця 8 з'єднана з в'язальною кареткою 11, встановленою на напрямних 12. Привід рукавичного автомата обладнаний двома засобами 13, 14 зниження динамічних навантажень, зумовлених зворотно-поступальним рухом в'язальної 11 та проміжної 9 кареток, встановленими по різні боки в'язальної каретки. Кожен засіб 13, 14 зниження динамічних навантажень обладнаний рухомою напрямною 15 (16), в якій розташована пружина 17 (18), стержнем 19 (20) з різьбою 21 (22), гайкою 23 (24), в яку загвинчено стержень, та обмежувачем 25 (26) осьового переміщення гайки. Стержні 19, 20 жорстко прикріплені до рухомих напрямних 15, 16, а пружини 17, 18 виконані плоскими прямими та встановленими з можливістю притискання до в'язальної каретки. Принцип роботи привода рукавичною автомата такий. При вмиканні електродвигуна 1 його рух за допомогою клинопасових передач 2, 4 і редуктора 3 передається ведучій зірочці 5. Обертання ведучої зірочки надає рух тяговому ланцюгу 7 і веденій зірочці 6. Жорстко закріплений на тяговому ланцюзі палець 8 приводить в рух проміжну каретку 9, що рухається по напрямній 10. Проміжна каретка 9 за допомогою пальця 8 з'єднана з в'язальною кареткою 11 і приводить її в зворотно-поступальний рух. В'язальна каретка рухається по напрямних 12. У момент часу, коли палець (S, жорстко закріплений на ланцюзі 7, переходить із прямолінійної на криволінійну ділянку тягового ланцюга, що характеризує сповільнення руху проміжної та в'язальної кареток, на в'язальну каретку 11 діє відповідно пружина 17 або 18. Сили інерції, обумовлені сповільненням руху кареток, нипають одну із пружин 17 або 18, накопичуючи в них енергію. При виведенні кареток зі стану спокою й до моменту досягнення сталого режиму руху пружини стиску віддають накопичену енергію, переборюючи сили інерції мас кареток, що розганяються. При зміні швидкісного режиму роботи рукавичною автомата, з метою досягнення максимального ефекту зниження динамічних навантажень, жорсткість пружин 17, 18 регулюється шляхом зміни її робочої довжини . Регулювання жорсткості пружини 17 (18) здійснюється обертанням гайки 23 (24). При цьому рухомі напрямні 15 (16) переміщуються вздовж пружин, змінюючи їх робочу довжину і, відповідно, жорсткість. 60 1 UA 115682 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 Привід рукавичного автомата, що містить електродвигун, в'язальну каретку, кінематично зв'язані між собою, та дві пружини, встановлені по різні боки в'язальної каретки з можливістю притискання до неї, який відрізняється тим, що додатково обладнаний двома рухомими напрямними, в яких розташовані пружини, двома стержнями, кожен з яких містить різьбу, двома гайками, в які загвинчені стержні, та двома обмежувачами осьового переміщення гайок, при цьому стержні жорстко прикріплені до рухомих напрямних, а пружини виконані плоскими прямими. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: D04B 15/16
Мітки: рукавичного, автомата, привід
Код посилання
<a href="https://ua.patents.su/4-115682-privid-rukavichnogo-avtomata.html" target="_blank" rel="follow" title="База патентів України">Привід рукавичного автомата</a>
Привід в’язальної каретки рукавичного автомата

Номер патенту: 109658
Опубліковано: 25.08.2016
Автори: Піпа Борис Федорович, Чабан Олексій Віталійович, Павленко Георгій Іванович
МПК: D04B 15/96
Мітки: привід, рукавичного, автомата, в'язальної, каретки
Формула / Реферат:
Привід в'язальної каретки рукавичного автомата, що містить з'єднані між собою в'язальну каретку, встановлену на напрямних, ведучу ланку, кулісу з кулісним каменем, шатун та кривошип, який відрізняється тим, що додатково обладнаний пальцем, жорстко з'єднаним з в'язальною кареткою, та скобою з двома циліндричними пружинами стиску, шарнірно з'єднаною з ведучою ланкою, причому палець встановлено між циліндричними пружинами стиску.
Привід рукавичного автомата
Номер патенту: 98249
Опубліковано: 27.04.2015
Автори: Чабан Олексій Віталійович, Музичишин Сергій Володимирович, Піпа Борис Федорович
МПК: D04B 15/16
Мітки: привід, автомата, рукавичного
Формула / Реферат:
Привід рукавичного автомата, що містить зв'язані між собою електродвигун, ланцюгову передачу, що містить ведучу, ведену зірочки та ланцюг, проміжну та в'язальну каретки з напрямними, з'єднані між собою, та пружину розтягу, встановлену в напрямній проміжної каретки з можливістю взаємодії з нею, причому проміжна каретка з'єднана з ланцюгом та в'язальною кареткою послідовно, який відрізняється тим, що додатково обладнаний двома пружинами...
Привід рукавичного автомата
Номер патенту: 102212
Опубліковано: 26.10.2015
Автори: Музичишин Сергій Володимирович, Піпа Борис Федорович, Павленко Георгій Іванович, Чабан Олексій Віталійович
МПК: D04B 15/16
Мітки: привід, автомата, рукавичного
Формула / Реферат:
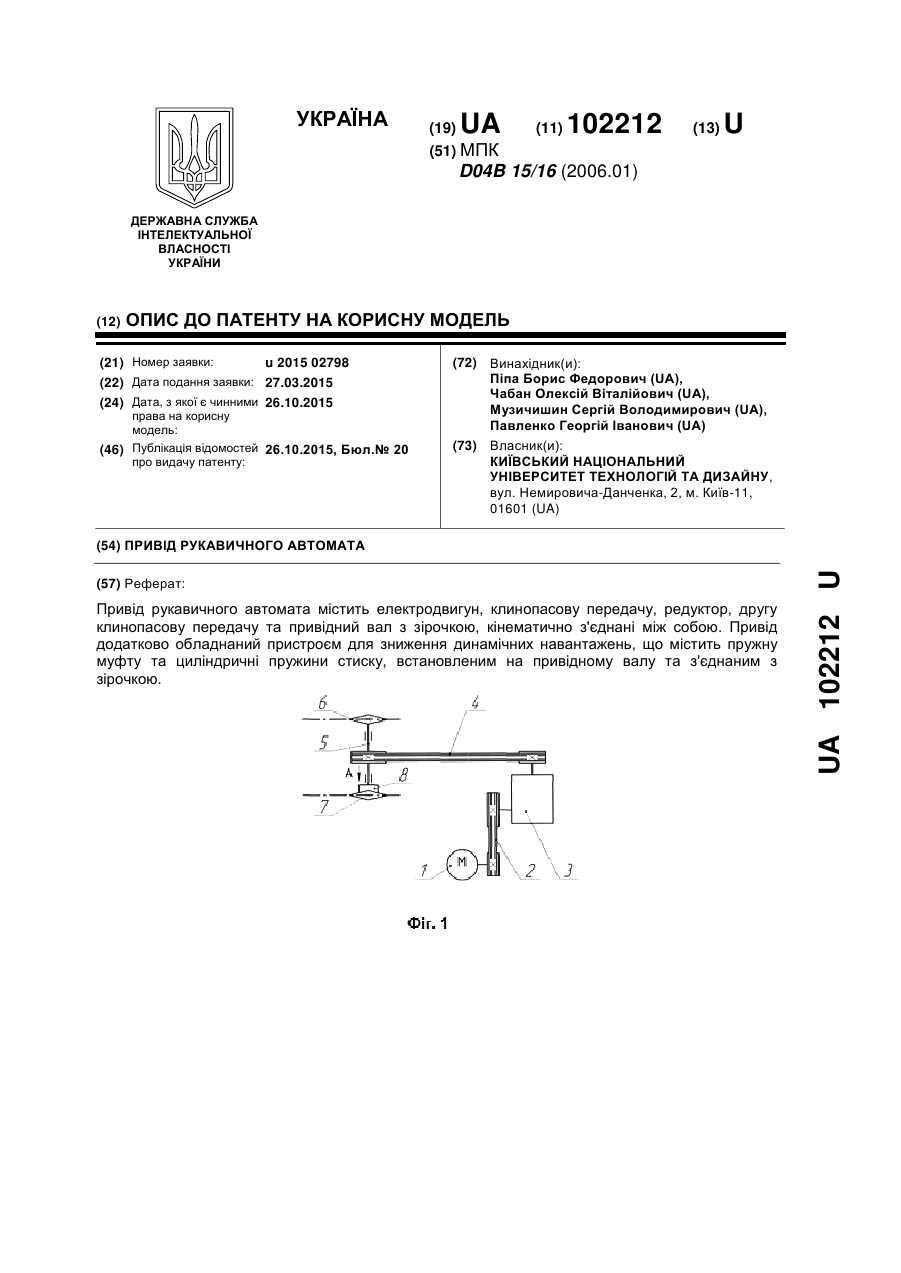
Привід рукавичного автомата, що містить електродвигун, клинопасову передачу, редуктор, другу клинопасову передачу та привідний вал з зірочкою, кінематично з'єднані між собою, який відрізняється тим, що додатково обладнаний пристроєм для зниження динамічних навантажень, що містить пружну муфту та циліндричні пружини стиску, встановленим на привідному валу та з'єднаним з зірочкою.
Привід рукавичного автомата

Номер патенту: 98327
Опубліковано: 27.04.2015
Автори: Музичишин Сергій Володимирович, Павленко Георгій Іванович, Піпа Борис Федорович, Чабан Олексій Віталійович
МПК: D04B 15/16, D04B 15/94
Мітки: автомата, привід, рукавичного
Формула / Реферат:
Привід рукавичного автомата, що містить електродвигун з валом та клинопасову передачу з ведучим шківом, встановленим на валу електродвигуна, який відрізняється тим, що додатково оснащений демпфіруючим пристроєм з пружними елементами, виконаними у вигляді радіальних пакетів плоских пружин, за допомогою яких вал електродвигуна з'єднаний з ведучим шківом.
Привід рукавичного автомата
Номер патенту: 95880
Опубліковано: 12.01.2015
Автори: Музичишин Сергій Володимирович, Піпа Борис Федорович, Чабан Олексій Віталійович
МПК: D04B 15/16
Мітки: рукавичного, привід, автомата
Формула / Реферат:
Привід рукавичного автомата, що містить електродвигун, механічні передачі та привідний вал, кінематично з'єднані між собою, який відрізняється тим, що додатково обладнаний обгінною муфтою та мотор-редуктором, розташованим співвісно з електродвигуном та з'єднаним з ним за допомогою обгінної муфти.
Попередній патент: Цівкова передача
Наступний патент: Привід в’язальної каретки рукавичного автомата
Випадковий патент: Барабанна сушарка