Спосіб адаптивного управління шахтним конвеєрним транспортом
Номер патенту: 119593
Опубліковано: 25.09.2017
Автори: Смірнов Андрій Миколайович, Монастирський Віталій Федорович, Кірія Руслан Вісаріонович, Мостовий Борис Іванович

Формула / Реферат
Спосіб адаптивного управління шахтним конвеєрним транспортом, що включає визначення раціональних середніх рівнів бункерів, при яких здійснюється вмикання і вимикання живильників для кожного бункера, який відрізняється тим, що управління шахтним конвеєрним транспортом здійснюють на двох рівнях: на верхньому рівні на основі аналізу функціонування ділянок шахти з умови максимальної продуктивності задають швидкості конвеєрів і живильників, а на нижньому рівні управління здійснюють підтримкою в бункерах мінімального середнього рівня вантажу вмиканням - вимиканням живильників за допомогою контролерів, у яких залежно від поточного вантажопотоку розраховується максимальний рівень вантажу для кожного бункера, причому при зміні схеми функціонування ділянок на верхньому рівні змінюють режими роботи конвеєрів і живильників, а потім знову управління здійснюють на нижньому рівні контролерами.
Текст
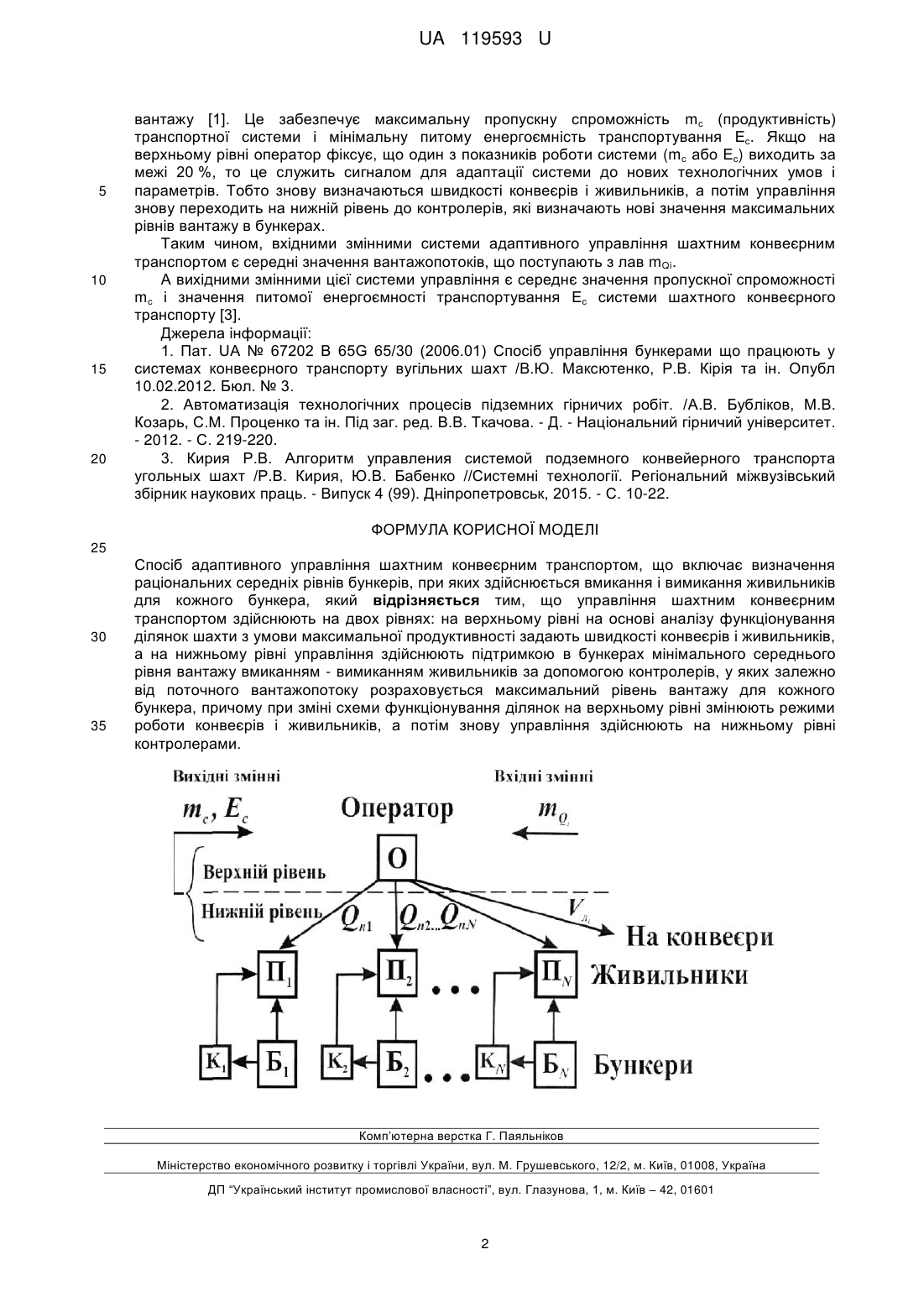
Реферат: Спосіб адаптивного управління шахтним конвеєрним транспортом включає визначення раціональних середніх рівнів бункерів, при яких здійснюється вмикання і вимикання живильників для кожного бункера. Управління шахтним конвеєрним транспортом здійснюють на двох рівнях: на верхньому рівні на основі аналізу функціонування ділянок шахти з умови максимальної продуктивності задають швидкості конвеєрів і живильників, а на нижньому рівні управління здійснюють підтримкою в бункерах мінімального середнього рівня вантажу вмиканням - вимиканням живильників за допомогою контролерів, у яких залежно від поточного вантажопотоку розраховується максимальний рівень вантажу для кожного бункера, причому при зміні схеми функціонування ділянок на верхньому рівні змінюють режими роботи конвеєрів і живильників, а потім знову управління здійснюють на нижньому рівні контролерами. UA 119593 U (54) СПОСІБ АДАПТИВНОГО УПРАВЛІННЯ ШАХТНИМ КОНВЕЄРНИМ ТРАНСПОРТОМ UA 119593 U UA 119593 U 5 10 15 20 25 30 35 40 45 50 55 60 Даний спосіб адаптивного управління шахтним конвеєрним транспортом може бути використано на гірничорудних підприємствах для управління вантажопотоками конвеєрних ліній за допомогою акумулюючих бункерів з використанням контролерів а також частотного регулювання швидкості живильників і конвеєрів. Відомий спосіб управління бункерами, що працюють у системах конвеєрного транспорту вугільних шахт, в якому за допомогою блока управління контролюють середнє значення вантажопотоку, що завантажується у бункер, і задають датчику безперервного контролю значення максимального рівня захисного шару, за досягненнями якого вмикають живильник, причому у разі зміни часу заповнення бункера блоком управління змінюють значення максимального рівня захисного шару вантажу [1]. Недоліком способу є те, що він здійснює лише локальне управління і не дає можливості управляти системами конвеєрного транспорту гірничих підприємств в цілому. Найбільш близьким до пропонованого є спосіб, що вирішує завдання управління системами бункерів [2], у якому визначається послідовність вмикання живильників, раціональні середні рівні бункерів, значення рівнів, при яких здійснюється вмикання й вимикання живильників для кожного бункера, а також максимально допустиме відхилення від середнього значення рівня матеріалу в бункері при його вивантаженні. Недоліком даного способу є відсутність управління системою конвеєрного транспорту на верхньому рівні. У основу способу адаптивного управління шахтним конвеєрним транспортом поставлено задачу підвищення ефективності управління вантажопотоками розгалужених систем конвеєрного транспорту, в якому за допомогою дворівневого управління підвищується ефективність функціонування системи конвеєрного транспорту з бункерами. Поставлена задача вирішується тим, що в способі адаптивного управління шахтним конвеєрним транспортом, що включає визначення раціональних середніх рівнів бункерів, при яких здійснюється вмикання і вимикання живильників для кожного бункера, згідно корисної моделі управління шахтним конвеєрним транспортом здійснюють на двох рівнях: на верхньому рівні на основі аналізу функціонування ділянок шахти з умови максимальної продуктивності задають швидкості конвеєрів і живильників, а на нижньому рівні управління здійснюють підтримкою в бункерах мінімального середнього рівня вантажу вмиканням - вимиканням живильників за допомогою контролерів, у яких залежно від поточного вантажопотоку розраховується максимальний рівень вантажу для кожного бункера, причому при зміні схеми функціонування ділянок на верхньому рівні змінюють режими роботи конвеєрів і живильників, а потім знову управління здійснюється на нижньому рівні контролерами. В результаті запропонованого способу адаптивного управління шахтним конвеєрним транспортом з'являється можливість на нижньому рівні управління підтримувати в бункерах системи мінімальний середній рівень вантажу управлінням живильниками за допомогою контролерів, а також при зміні комплексних показників системи на верхньому рівні змінювати швидкості конвеєрів і живильників і надалі знову управляти системою на нижньому рівні. Це дає можливість підвищити пропускну спроможність і понизити енерговитрати на транспортування гірської маси. Корисна модель пояснюється кресленням, на якому показано блок-схему, що описує пропонований спосіб. Управління системою підземного конвеєрного транспорту вугільних шахт можна представити як дворівневу ієрархічну систему. На верхньому рівні цієї системи оператором, виходячи з поточної інформації про вантажопотоки вугілля, що поступають із забоїв mQi, стану конвеєрів і технологічного устаткування системи підземного конвеєрного транспорту, на основі рішення задачі структурної адаптації вибирається схема конвеєрного транспорту, визначаються швидкості конвеєрів vлі і швидкості живильників vni (тобто їх продуктивності Qni). При цьому критерієм вибору структурної схеми конвеєрного транспорту є середня пропускна спроможність системи конвеєрного транспорту [3]. Іншими словами, функцією мети задачі управління шахтним конвеєрним транспортом на верхньому рівні управління є середня пропускна спроможність mс (продуктивність), тобто mс → max. Інформація від оператора (тобто значення vлі, і Qni) передається на нижній рівень управління. На нижньому рівні управління контролери Кi на підставі інформації про поточний вантажопотік, що поступає у відповідний бункер, визначають максимальні рівні вантажу в бункерах як граничні рівні для управління живильниками. Крім того, на нижньому рівні контролери Кi управляють продуктивністю живильників, вмикаючи - вимикаючи їх при досягненні розрахованого максимального або завданого мінімального рівня вантажу, тим самим підтримуючи в бункерах мінімальні середні рівні 1 UA 119593 U 5 10 15 20 вантажу [1]. Це забезпечує максимальну пропускну спроможність mс (продуктивність) транспортної системи і мінімальну питому енергоємність транспортування Ес. Якщо на верхньому рівні оператор фіксує, що один з показників роботи системи (mс або Ес) виходить за межі 20 %, то це служить сигналом для адаптації системи до нових технологічних умов і параметрів. Тобто знову визначаються швидкості конвеєрів і живильників, а потім управління знову переходить на нижній рівень до контролерів, які визначають нові значення максимальних рівнів вантажу в бункерах. Таким чином, вхідними змінними системи адаптивного управління шахтним конвеєрним транспортом є середні значення вантажопотоків, що поступають з лав mQi. А вихідними змінними цієї системи управління є середнє значення пропускної спроможності mс і значення питомої енергоємності транспортування Ес системи шахтного конвеєрного транспорту [3]. Джерела інформації: 1. Пат. UA № 67202 В 65G 65/30 (2006.01) Спосіб управління бункерами що працюють у системах конвеєрного транспорту вугільних шахт /В.Ю. Максютенко, Р.В. Кірія та ін. Опубл 10.02.2012. Бюл. № 3. 2. Автоматизація технологічних процесів підземних гірничих робіт. /А.В. Бубліков, М.В. Козарь, С.М. Проценко та ін. Під заг. ред. В.В. Ткачова. - Д. - Національний гірничий університет. - 2012. - С. 219-220. 3. Кирия Р.В. Алгоритм управления системой подземного конвейерного транспорта угольных шахт /Р.В. Кирия, Ю.В. Бабенко //Системні технології. Регіональний міжвузівський збірник наукових праць. - Випуск 4 (99). Дніпропетровськ, 2015. - С. 10-22. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 Спосіб адаптивного управління шахтним конвеєрним транспортом, що включає визначення раціональних середніх рівнів бункерів, при яких здійснюється вмикання і вимикання живильників для кожного бункера, який відрізняється тим, що управління шахтним конвеєрним транспортом здійснюють на двох рівнях: на верхньому рівні на основі аналізу функціонування ділянок шахти з умови максимальної продуктивності задають швидкості конвеєрів і живильників, а на нижньому рівні управління здійснюють підтримкою в бункерах мінімального середнього рівня вантажу вмиканням - вимиканням живильників за допомогою контролерів, у яких залежно від поточного вантажопотоку розраховується максимальний рівень вантажу для кожного бункера, причому при зміні схеми функціонування ділянок на верхньому рівні змінюють режими роботи конвеєрів і живильників, а потім знову управління здійснюють на нижньому рівні контролерами. Комп’ютерна верстка Г. Паяльніков Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B65G 65/30
Мітки: конвеєрним, транспортом, спосіб, адаптивного, шахтним, управління
Код посилання
<a href="https://ua.patents.su/4-119593-sposib-adaptivnogo-upravlinnya-shakhtnim-konveehrnim-transportom.html" target="_blank" rel="follow" title="База патентів України">Спосіб адаптивного управління шахтним конвеєрним транспортом</a>
Спосіб адаптивного управління динамічним об’єктом в системах термінального управління
Номер патенту: 51941
Опубліковано: 10.08.2010
Автори: Мельник Олександр Дмитрович, Іванов Борис Павлович, Копилова Зінаїда Миколаївна, Кучеров Дмитро Павлович
МПК: G05B 13/00, G05B 11/00
Мітки: об'єктом, динамічним, адаптивного, термінального, спосіб, управління, системах
Формула / Реферат:
Спосіб адаптивного управління динамічним об'єктом в системах термінального управління, за яким в системі керування встановлюють вхідні дані, що включають бажану похибку відпрацювання завдання об'єктом керування, вхідні дані про кінцевий та початковий стан об'єкта керування, початкові значення вагових коефіцієнтів контролера, значення початкового керування в системі термінального управління, та в процесі руху вимірюють координати об'єкта...
Спосіб управління бункерами, що працюють у системах конвеєрного транспорту вугільних шахт
Номер патенту: 67202
Опубліковано: 10.02.2012
Автори: Смірнов Андрій Миколайович, Кірія Руслан Вісаріонович, Максютенко Валерій Юрійович, Уколов Сергій Васильович, Кравчук Олексій Леонідович, Касандін Роман Вікторович, Брагінець Дмитро Дмитрийович
МПК: B65G 65/30
Мітки: конвеєрного, бункерами, шахт, системах, спосіб, працюють, вугільних, управління, транспорту
Формула / Реферат:
Спосіб управління бункерами, що працюють у системах конвеєрного транспорту вугільних шахт, який включає контроль мінімального і максимального рівня захисного шару вантажу в бункері та обробку інформації блоком управління, який відрізняється тим, що живильник вимикають при досягненні мінімального значення захисного шару вантажу, за часом заповнення бункера за допомогою блока управління обчислюють середнє значення вантажопотоку, що...
Система автоматизованого керування конвеєрним навантажувальним пристроєм
Номер патенту: 58694
Опубліковано: 26.04.2011
Автори: Калашніков Олег Юрійович, Вальченко Сергій Борисович, Бачурін Віктор Іванович, Сахарчук Костянтин Павлович, Сухомлинов Олександр Володимирович, Кіріченко Анатолій Іванович, Роменський Володимир Костянтинович
МПК: E21F 13/08, B65G 47/74
Мітки: конвеєрним, автоматизованого, навантажувальним, керування, система, пристроєм
Формула / Реферат:
Система автоматизованого керування конвеєрним вантажним пристроєм, що містить програмований логічний контролер та взаємодіючі з ним рушій ходу конвеєрного вантажного пристрою з вузлом керування рушієм, рушій реверсивного конвеєра з вузлом керування реверсивним конвеєром і гідравлічний рушій шибера бункера з вузлом керування гідравлічним рушієм шибера, яка відрізняється тим, що система додатково оснащена ультразвуковими датчиками контролю...
Спосіб адаптивного управління
Номер патенту: 63466
Опубліковано: 10.10.2011
Автори: Стеценко Олексій Сергійович, Пестунов Володимир Михайлович
МПК: B23Q 5/00
Мітки: адаптивного, спосіб, управління
Формула / Реферат:
Спосіб адаптивного управління, що включає контроль навантаження і за результатами здійснення регулювання подачі, який відрізняється тим, що навантаження виконавчого органу приводу подачі при заданих режимах обробки знижують до оптимального по точності рівня і на цьому рівні стабілізують, причому зниження навантаження здійснюють шляхом розділення потоку потужності кінематичного ланцюга подачі, для цього частину потужності передають з...
Спосіб управління завантаженням та розвантаженням паралельно встановлених бункерів насипним матеріалом
Номер патенту: 113708
Опубліковано: 27.02.2017
Автори: Кірія Руслан Вісаріонович, Номеровський Денис Анатолійович, Мостовий Борис Іванович, Смірнов Андрій Миколайович, Монастирський Віталій Федорович
МПК: G05D 9/00, B65G 65/30
Мітки: насипним, управління, бункерів, матеріалом, спосіб, встановлених, завантаженням, паралельно, розвантаженням
Формула / Реферат:
Спосіб управління завантаженням і розвантаженням паралельно встановлених бункерів насипним матеріалом, який включає контроль нижнього, верхнього і поточного рівнів завантажуваного насипного матеріалу в бункер, продуктивності завантажувального конвеєра і живильника, порівняння отриманих даних і регулювання продуктивності живильника, який відрізняється тим, що спочатку встановлюють кількість працюючих завантажувальних бункерів і за умови, що...
Попередній патент: Спосіб визначення утомленості професорсько-викладацького складу
Наступний патент: Екстремальний регулятор потужності сонячної батареї
Випадковий патент: Спосіб лікування ретроградної еякуляції