Ковальський маніпулятор
Формула / Реферат
Ковальський маніпулятор, що містить маніпулюючий хобот, шасі у вигляді зварної рами, механізм пересування у вигляді двох колісних пар, які переміщуються уздовж рейкового шляху і рух яким задається від приводу, який відрізняється тим, що оснащений додатковою колісною парою, що зв’язана з задньою колісною парою механізму пересування маніпулятора через регульований важіль, а з передньою - через важіль жорсткості, причому важелі оснащено пристроями для регулювання міжосьових відстаней, та пересувається по додатковому рейковому шляху, який прокладено під вже існуючим та паралельно йому.
Текст
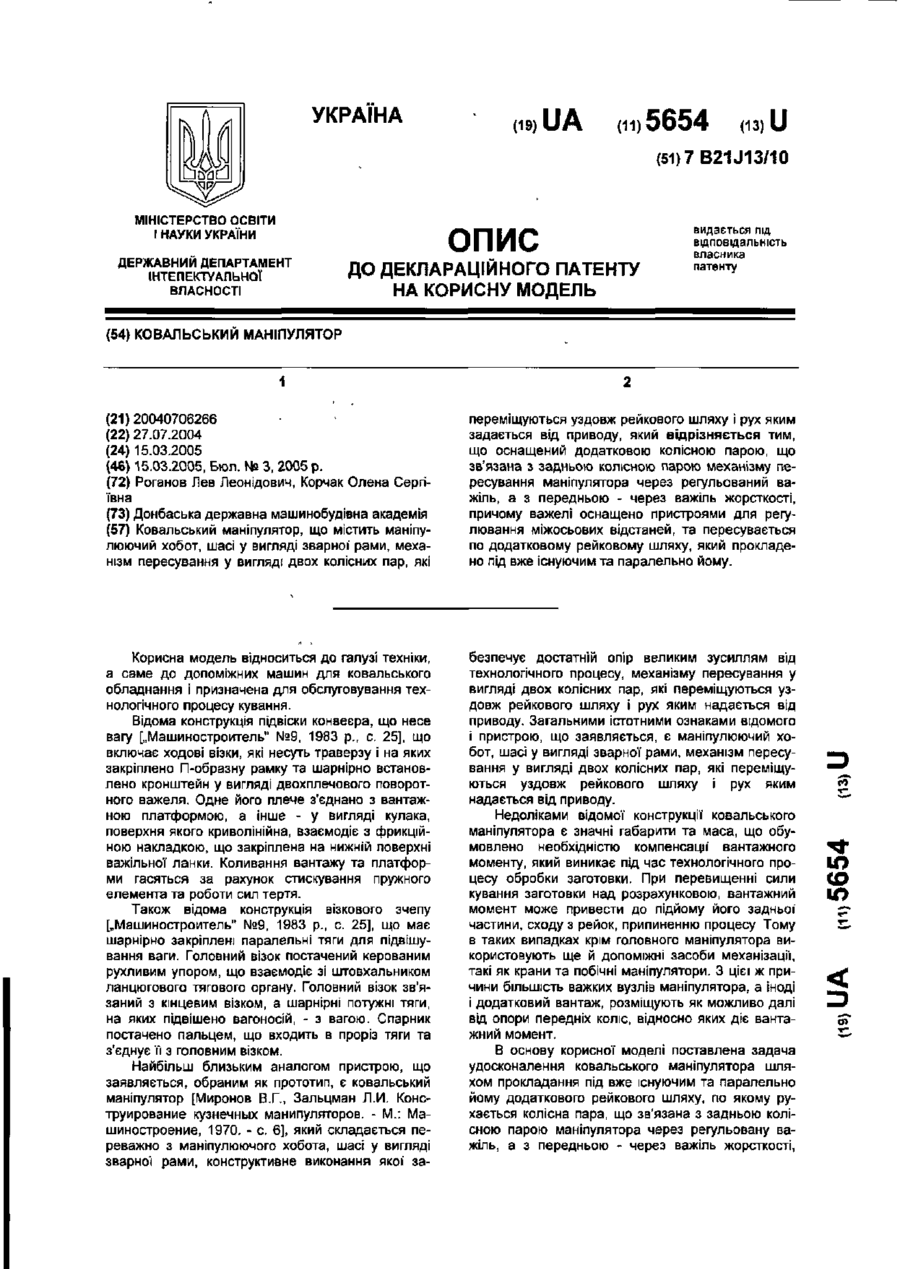
Ковальський маніпулятор, що містить маніпулюючий хобот, шасі у вигляді зварної рами, механізм пересування у вигляді двох колісних пар, які переміщуються уздовж рейкового шляху і рух яким задається від приводу, який відрізняється тим, що оснащений додатковою колісною парою, що зв'язана з задньою колісною парою механізму пересування маніпулятора через регульований важіль, а з передньою - через важіль жорсткості, причому важелі оснащено пристроями для регулювання міжосьових відстаней, та пересувається по додатковому рейковому шляху, який прокладено під вже існуючим та паралельно йому. Корисна модель відноситься до галузі техніки, а саме до допоміжних машин для ковальського обладнання і призначена для обслуговування технологічного процесу кування. Відома конструкція підвіски конвеєра, що несе вагу [„Машиностроитель" №9, 1983 р., с. 25], що включає ходові візки, які несуть траверзу і на яких закріплено П-образну рамку та шарнірно встановлено кронштейн у вигляді двохплечового поворотного важеля. Одне його плече з'єднано з вантажною платформою, а інше - у вигляді кулака, поверхня якого криволінійна, взаємодіє з фрикційною накладкою, що закріплена на нижній поверхні важільної ланки. Коливання вантажу та платформи гасяться за рахунок стискування пружного елемента та роботи сил тертя. Також відома конструкція візкового зчепу [„Машиностроитель" №9, 1983 р., с. 25], що має шарнірно закріплені паралельні тяги для підвішування ваги. Головний візок постачений керованим рухливим упором, що взаємодіє зі штовхальником ланцюгового тягового органу. Головний візок зв'язаний з кінцевим візком, а шарнірні потужні тяги, на яких підвішено вагоносій, - з вагою. Спарник постачено пальцем, що входить в проріз тяги та з'єднує її з головним візком. Найбільш близьким аналогом пристрою, що заявляється, обраним як прототип, є ковальський маніпулятор [Миронов В.Г., Зальцман Л.И. Конструирование кузнечных манипуляторов. - М.: Машиностроение, 1970. - с. 6], який складається переважно з маніпулюючого хобота, шасі у вигляді зварної рами, конструктивне виконання якої за безпечує достатній опір великим зусиллям від технологічного процесу, механізму пересування у вигляді двох колісних пар, які переміщуються уздовж рейкового шляху і рух яким надається від приводу. Загальними істотними ознаками відомого і пристрою, що заявляється, є маніпулюючий хобот, шасі у вигляді зварної рами, механізм пересування у вигляді двох колісних пар, які переміщуються уздовж рейкового шляху і рух яким надається від приводу. Недоліками відомої конструкції ковальського маніпулятора є значні габарити та маса, що обумовлено необхідністю компенсації' вантажного моменту, який виникає під час технологічного процесу обробки заготовки. При перевищенні сили кування заготовки над розрахунковою, вантажний момент може привести до підйому його задньої частини, сходу з рейок, припиненню процесу Тому в таких випадках крім головного маніпулятора використовують ще й допоміжні засоби механізації, такі як крани та побічні маніпулятори. З цієї ж причини більшість важких вузлів маніпулятора, а іноді і додатковий вантаж, розміщують як можливо далі від опори передніх коліс, відносно яких діє вантажний момент. В основу корисної моделі поставлена задача удосконалення ковальського маніпулятора шляхом прокладання під вже існуючим та паралельно йому додаткового рейкового шляху, по якому рухається колісна пара, що зв'язана з задньою колісною парою маніпулятора через регульовану важіль, а з передньою - через важіль жорсткості, т ю ю 5654 Ковальський маніпулятор Фіг.1, Фіг.2 містить шасі 1 у вигляді зварної рами, маніпулюючий хобот 2 з кліщами, які захоплюють поковку 3, механізм пересування у вигляді двох колісних пар передньої 4 та задньої 5. Маніпулятор рухається по направляючим рейкам 6. Додаткова колісна пара 7 зв'язана з задньою колісною парою 5 механізму пересування маніпулятора через регульовану важіль 8, а з передньою - через важіль жорсткості 9, що постачені пристроями 10 та 11 для регулювання міжосьових відстаней. Колісна пара 7 пересувається по додатковому рейковому шляху 12, який прокладено під вже існуючим шляхом 6 та паралельно йому. Ковальський маніпулятор працює таким чином. Системою керування ковальський маніпулятор по рейковому шляху 6 підводиться до ковальського обладнання, при цьому колісна пара 7, будучи з'єднаною за допомогою важелів 8 і 9 з колісними парами 4 І 5 механізму пересування маніпулятора, переміщується по направляючій рейці 12 Хобот 2 затискує поковку 3 і здійснюється технологічний процес обробки тиском поковки 3. Під час кування технологічні зусилля сприймаються додатковою колісною парою 7, важелями 8 та 9, а також додатково прокладеним рейковим шляхом 12, при цьому їх вплив на шасі 1 та елементи хобота 2 мінімальний. Щоб уникнути заклинювання чи пробуксовування маніпулятора необхідно точно відрегулювати відстань між осями колісних пар 4 і 5 та додатковою колісною парою 7. Регулювання цих відстаней здійснюється пристроями Юта 11. причому важелі постачено пристроями для регулювання міжосьових відстаней Поставлена задача вирішується тим, що ковальський маніпулятор постачений додатковою колісною парою, яка зв'язана з задньою колісною парою механізму пересування маніпулятора через регульовану важіль, а з передньою - через важіль жорсткості, причому важелі постачено пристроями для регулювання міжосьових відстаней, та пересувається по додатковому рейковому шляху, який прокладено під вже існуючим та паралельно йому. Запропонована конструкція забезпечує зменшення габаритів та ваги ковальського маніпулятора за рахунок перерозподілу зусиль в конструкції рами, що досягається шляхом сприйняття технологічних зусиль додатковою колісною парою, яка важелями з пристроями для регулювання міжосьових відстаней з'єднано з колісними парами механізму пересування маніпулятора, а також додатково прокладеним рейковим шляхом, при цьому вплив на елементи хобота мінімальний. Застосування додаткової колісної пари, що зв'язана з задньою колісною парою механізму пересування маніпулятора через регульовану важіль, а з передньою - через важіль жорсткості, причому важелі постачено пристроями для регулювання міжосьових відстаней, та пересувається по додаткового рейкового шляху, який прокладено під вже існуючим та паралельно йому, дозволяє збільшити вантажопідйомність маніпулятора, його економічну ефективність та надійність, дає можливість легкого пристосування приладу до існуючих у цеху рейкових шляхів Суть запропонованого корисної моделі пояснюється кресленням, на якому зображена схема ковальського маніпулятора. ФІг.1 Комп'ютерна верстка А. Крижашвський Підписне Тираж 28 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Київ - 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюForging manipulator
Автори англійськоюRohanov Lev Leonidovych, Korchak Olena Serhiivna
Назва патенту російськоюКузнечный манипулятор
Автори російськоюРоганов Лев Леонидович, Корчак Елена Сергеевна
МПК / Мітки
МПК: B21J 13/00
Мітки: маніпулятор, ковальський
Код посилання
<a href="https://ua.patents.su/2-5654-kovalskijj-manipulyator.html" target="_blank" rel="follow" title="База патентів України">Ковальський маніпулятор</a>
Маніпулятор

Номер патенту: 50260
Опубліковано: 15.10.2002
Автори: Москаленко Олександр Володимирович, Вігдергауз Леонід Павлович
МПК: E21B 1/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, що складається із стріли, шарнірно приєднаної до нерухомої напрямної телескопічного подавача бурильної машини, спареного гідроциліндра переміщення подавача нагору і вниз, гідроциліндра переміщення стріли маніпулятора у вертикальній площині, гідроциліндра повороту стріли маніпулятора за допомогою рейкової зубчатої передачі і кронштейна, до якого приєднана стріла, і гідроциліндра переміщення стріли у вертикальній площині, який...
Маніпулятор для установлення та знімання шиберних затворів
Номер патенту: 58993
Опубліковано: 15.08.2003
Автори: Слівченко Анатолій Іванович, Музирін Олександр Олегович
МПК: B22D 41/08, B25J 1/00
Мітки: установлення, знімання, маніпулятор, затворів, шиберних
Формула / Реферат:
Маніпулятор для установлення та знімання шиберних затворів, що містить нерухомий стояк, циліндр, на штоку якого встановлено з можливістю обертання стіл, важіль з вузлом кріплення циліндра,який відрізняється тим, що стіл додатково містить знімний пристрій для формування гнізда під сталерозливний вогнетривкий стакан, а вузол кріплення циліндра виконано у вигляді нерухомо закріпленого до торця важеля корпусу з пружиною, на яку встановлено...
Ковальський зливок

Номер патенту: 54801
Опубліковано: 17.03.2003
Автори: Соколов Лев Миколайович, Марков Олег Євгенійович, Олешко Віктор Михайлович, Алієв Іграмотдін Серажутдінович, Михайленко Борис Омелянович
МПК: B21J 1/00
Мітки: зливок, ковальський
Формула / Реферат:
Ковальський зливок з піддоном, що включає прибуткову частину і тіло зливка, виконаного у вигляді багатогранника з гранями у вигляді кривої по її ширині, який відрізняється тим, що ковальський зливок виконано з увігнутою бічною поверхнею (по типу однопорожнинного гіперболоїда обертання) зі стрілою прогину = 0,08...0,12
Маніпулятор ручний

Номер патенту: 54126
Опубліковано: 17.02.2003
Автор: Черкащенко Григорій Миколайович
МПК: A01G 3/00
Мітки: маніпулятор, ручний
Формула / Реферат:
1. Маніпулятор ручний, що містить несучий елемент, виконаний у вигляді штанги, різальний ніж, розміщений на його кінці і жорстко прикріплений до нього, протирізальний ніж, що шарнірно з'єднаний з тягою, важіль управління, зв'язаний з тягою, який відрізняється тим, що робоча поверхня різального ножа виконана клиноподібної форми, а робоча поверхня протирізального ножа має прямокутну форму, при цьому робочі поверхні ножів зміщені одна відносно...
Космічний маніпулятор
Номер патенту: 734
Опубліковано: 15.03.2001
Автори: Бойченко Тамара Михайлівна, Пуриш Валентин Захарович
Мітки: космічний, маніпулятор
Формула / Реферат:
Космічний маніпулятор, що складається із опорного каркаса , побудованого із шарнірних слідкуючих приводів з мікропроцесорним керуванням у м'якому гідроскафандрі, навішаної портативної пневмостанції, центрального комп'ютера програмного керування, систем гіростабілізації та супервізорного керування по кабельному каналу, який відрізняється тим, що його опорний каркас побудовано із шарнірних слідкуючих пневмоприводів, система...
Попередній патент: Бактеріальна тест-система для первинного скринінгу препаратів на протипухлинну активність
Наступний патент: Пристрій для забезпечення іскробезпеки ліній, що живлять індуктивне навантаження
Випадковий патент: Миючий засіб на основі синергетичної комбінації біологічно м'яких аніонної та неіоногенної поверхнево-активних речовин