Ковальський маніпулятор
Номер патенту: 10294
Опубліковано: 15.11.2005
Автори: Роганов Максим Львович, Корчак Олена Сергіївна, Роганов Лев Леонідович
Формула / Реферат
Ковальський маніпулятор, що містить маніпулюючий хобот, шасі у вигляді зварної рами, механізм пересування у вигляді двох колісних пар, які переміщуються уздовж рейкового шляху, рух яким надається від приводу, додаткову колісну пару, яка зв'язана з задньою колісною парою механізму пересування маніпулятора та пересувається по додатковому рейковому шляху, який прокладено під вже існуючим та паралельно йому, який відрізняється тим, що ковальський маніпулятор оснащений шарнірно з'єднаними важелями, які з'єднують додаткову колісну пару з рамою маніпулятора гідравлічним зв'язком у вигляді поршневого гідроциліндра, до складу якого входять корпус з кришкою, що стягнуті шпильками, ущільнені шток-тяга та поршень, при цьому корпус має шарнір для з'єднання з віссю додаткової колісної пари, верхня та нижня порожнини циліндра мають отвори для подачі тиску керування, запобіжною системою, що виконані у вигляді регульованого запобіжного клапана, манометра та сигналізації.
Текст
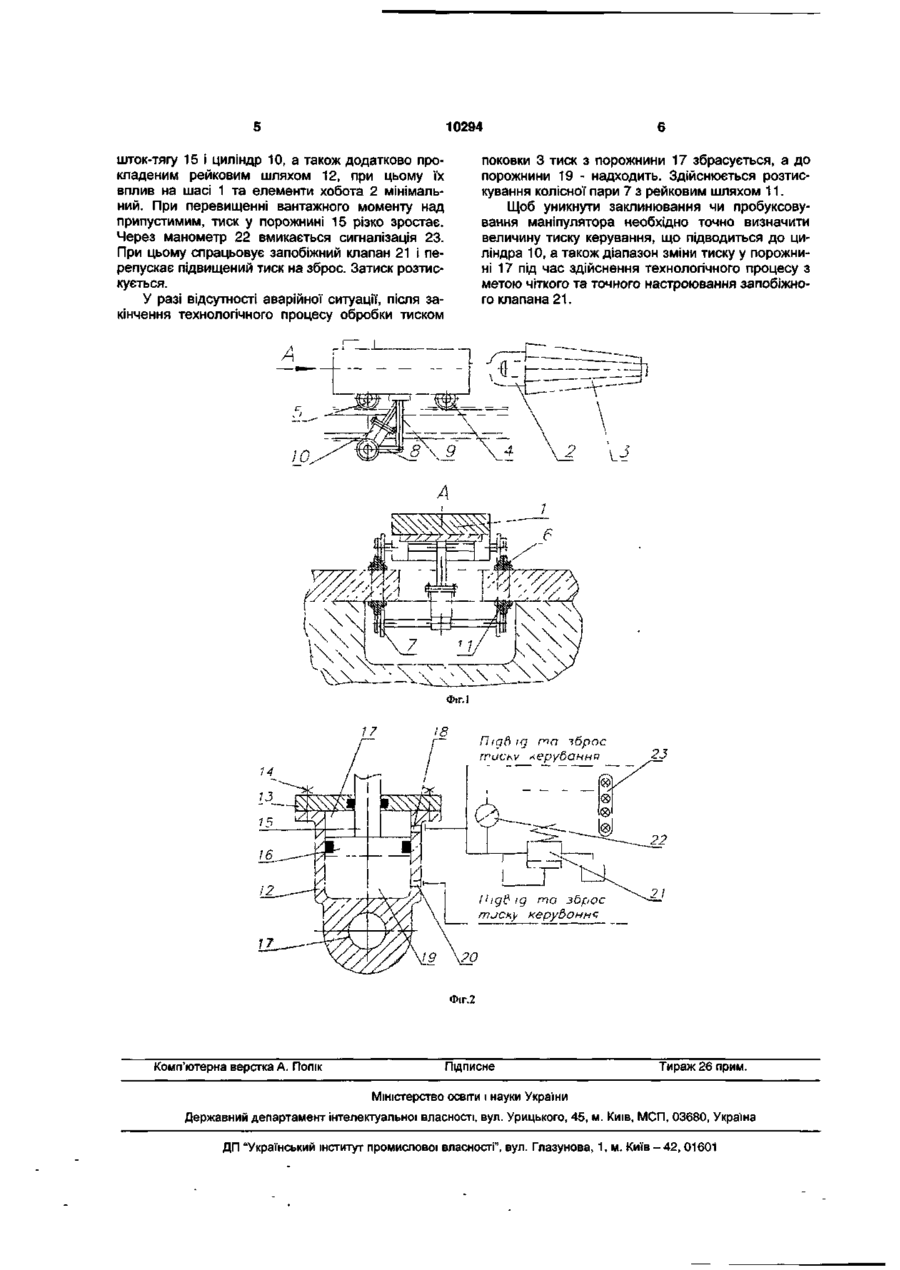
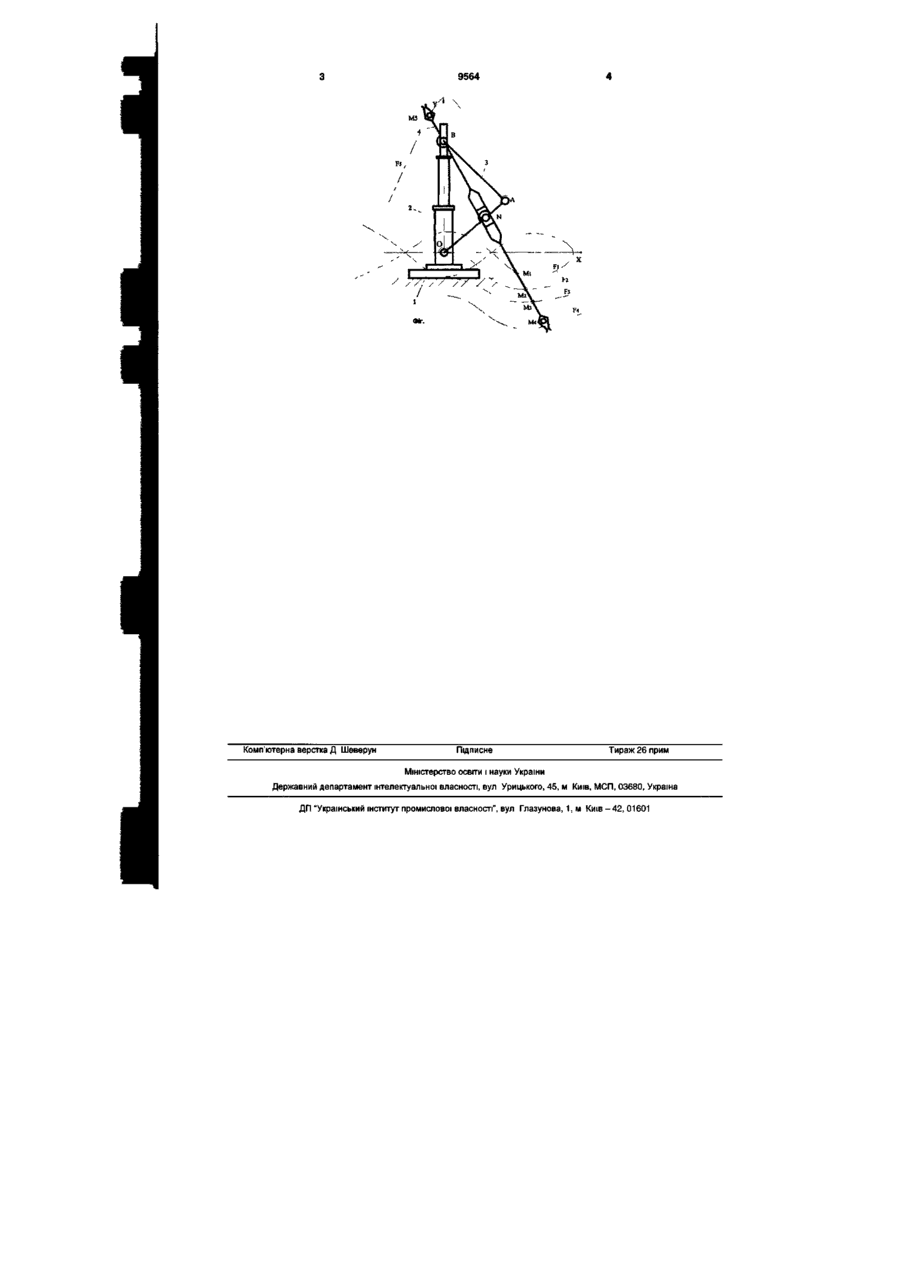
Ковальський маніпулятор, що містить маніпулюючий хобот, шасі у вигляді зварної рами, механізм пересування у вигляді двох колісних пар, які переміщуються уздовж рейкового шляху, рух яким надається від приводу, додаткову колісну пару, яка зв'язана з задньою колісною парою механізму пересування маніпулятора та пересувається по додатковому рейковому шляху, який прокладено під вже існуючим та паралельно йому, який відрізняється тим, що ковальський маніпулятор оснащений шарнірно з'єднаними важелями, які з'єднують додаткову колісну пару з рамою маніпулятора гідравлічним зв'язком у вигляді поршневого гідроциліндра, до складу якого входять корпус з кришкою, що стягнуті шпильками, ущільнені шток-тяга та поршень, при цьому корпус має шарнір для з'єднання з віссю додаткової колісної пари, верхня та нижня порожнини циліндра мають отвори для подачі тиску керування, запобіжною системою, що виконані у вигляді регульованого запобіжного клапана, манометра та сигналізації. Корисна модель відноситься до галузі машинобудування, а саме до допоміжних машин для ковальського обладнання і призначена для обслуговування технологічного процесу кування. Відома конструкція ковальського маніпулятору [Миронов В.Г., Зальцман Л.И. Конструирование кузнечных манипуляторов. - М.: Машиностроение, 1970. - с.6], який складається переважно з маніпулюючого хобота, шасі у вигляді зварної рами, конструктивне виконання якої забезпечує достатній опір великим зусиллям від технологічного процесу, механізму пересування у вигляді двох колісних пар, які переміщуються уздовж рейкового шляху і рух яким надається від приводу. Також відома конструкція ковальського маніпулятору [А.с. СССР 1263420 А1, МПК B21J13/10. Кузнечный манипулятор / Промысловский В.Д. Опубл. 15.10.86. Бюл. №38], що містить основу, встановлений на ній корпус з розміщеним у ньому з можливістю обертання та зворотнопоступального переміщення хоботом з змонтованим на ньому кліщовим захватом. Механізм зведення важелів кліщового захвата виконано у вигляді тяги, одним кінцем зв'язаний з важелями кліщового захвата, а іншим - зі штоком пневмоциліндра. З метою підвищення надійності маніпулятор постачено жорстко зв'язаною з корпусом пневмоциліндра та, що охоплює хобот зі сторони кліщового захвата, обоймою з фіксатором її положення відносно хобота, копірами, що мають паралельні та похиленими відносно осі хобота поверхнями, та парами шарнірно з'єднаних між собою важелів по кількості копірів, вільний кінець одного з яких у кожній парі зв'язано з хоботом. Вільний кінець другої важелі у кожній парі розміщено з можливістю взаємодії з тягою за допомогою шарнірно змонтованого на ньому притиску. При цьому шарніри, що зв'язують важелі між собою та з притисками, постачено роликами, які розташовано з можливістю взаємодії з поверхнями відповідних копірів. У свою чергу обойму виконано з радіальним отвором, а фіксатор положення обойми відносно хобота виконано у вигляді кульки, яку встановлено у радіальному отворі обойми, підпружиненого штоку з кільцевою проточкою, який розміщено з можливістю взаємодії своєю бічною поверхнею з кулькою, та плунжеру, який встановлено у торцевій стінці корпусу пневмоциліндра зі сторони його робочої порожнини з можливістю взаємодії з підпружиненим штоком. Відома також конструкція затиску для кріплення висувного столу преса [А.с. СССР 861106, МПК В30В15/02. Зажим для крепления выдвижного стола пресса / Капцан В.Д., Федоркевич В.Ф. Опубл. 07.09.81. Бюл. №33], що містить корпус, в опорах якого змонтовано ексцентриковий вал, О) CM О) 10294 жорстко закріплені на останньому та зв'язані між собою віссю щоки, між якими на мотилевій шийці ексцентрикового вала встановлено затиск з Тобразною головкою, а також шарнірно закріплений в корпусі пневмоциліндр, шток якого зв'язано з віссю. З метою підвищення надійності затиск постачено додатковою віссю, пружиною та гільзою. При цьому на затиску виконано циліндричне гніздо та виступ з плоскою гранню, що паралельна осі гнізда. Пружину та гільзу змонтовано в циліндричному гнізді, а додаткову вісь - в щоках. Причому гільза контактує з додатковою віссю. Найбільш близьким аналогом пристрою, що заявляється, обраним як прототип, є ковальський маніпулятор [Висновок про видачу деклараційного патенту на корисну модель згідно з заявкою №20040706266 від 27.07.2004], що містить маніпулюючий хобот, шасі у вигляді зварної рами, механізм пересування у вигляді двох колісних пар, які переміщуються уздовж рейкового шляху і рух яким надається від приводу, постачений додатковою колісною парою, що зв'язана з задньою колісною парою механізму пересування маніпулятора через регульовану важіль, а з передньою - через важіль жорсткості, причому важелі постачено пристроями для регулювання міжосьових відстаней, та пересувається по додатковому рейковому шляху, який прокладено під вже існуючим та паралельно йому. Загальними істотними ознаками відомого і пристрою, що заявляється, є маніпулюючий хобот, шасі у вигляді зварної рами, механізм пересування у вигляді двох колісних пар, які переміщуються уздовж рейкового шляху і рух яким надається від приводу, додаткова колісна пара, яка зв'язана з задньою колісною парою механізму пересування маніпулятора та пересувається по додатковому рейковому шляху, який прокладено під вже існуючим та паралельно йому. Недоліками відомої конструкції ковальського маніпулятора є наявність жорсткого механічного зв'язку колісних пар між собою через регульовані важелі. При перевищенні сили кування заготовки над розрахунковою, вантажний момент може привести до виникнення у важелях напружень, що перевищують припустимі, і, як результат цього, відбувається заклинювання колісних пар та руйнування важелів. А це в свою чергу призводить до припинення технологічного процесу. Більш того, дуже незручним є регулювання міжосьових відстаней колісних пар та дуже важко досягти належну точність регулювання. До того ж наявність жорсткого механічного зв'язку обмежує вантажопідйомність маніпулятора. В основу корисної моделі поставлена задача удосконалення ковальського маніпулятора шляхом заміни жорсткого механічного зв'язку гідравлічним з запобіжною системою. За рахунок цього підвищується надійність і довговічність приладу. Поставлена задача вирішується тим, що ковальський маніпулятор постачено шарнірно з'єднаними важелями, які з'єднують додаткову колісну пару рамою маніпулятора, гідравлічним зв'язком у вигляді поршневого гідроциліндра, до складу якого входять корпус з кришкою, що стягнуті шпильками, ущільнені шток-тяга та поршень, при цьому корпус має шарнір для з'єднання з віссю додаткової колісної пари, верхня та нижня порожнини циліндра мають отвори для подачі тиску керування, запобіжною системою, що виконано у вигляді регульованого запобіжного клапана, манометра та сигналізації. Запропонована конструкція забезпечує зручність регулювання міжосьових відстаней колісних пар та легке досягнення належної точності регулювання, підвищення вантажопідйомність маніпулятора із-за наявності гідравлічного зв'язку та надійність приладу як результат чіткої роботи запобіжної системи. Застосування шарнірно з'єднаних важелів, які з'єднують додаткову колісну пару рамою маніпулятора, гідравлічного зв'язку у вигляді поршневого гідроциліндра, до складу якого входять корпус з кришкою, що стягнуті шпильками, ущільнені штоктяга та поршень, при цьому корпус має шарнір для з'єднання з віссю додаткової колісної пари, верхня та нижня порожнини циліндра мають отвори для подачі тиску керування, запобіжної системи, що виконано у вигляді регульованого запобіжного клапана, манометра та сигналізації, дозволяє забезпечити надійну та довговічну роботу самого маніпулятора та його конструктивних елементів. Суть запропонованого корисної моделі пояснюється кресленням, на якому зображена схема ковальського маніпулятора. Ковальський маніпулятор фіг.1 містить шасі 1 у вигляді зварної рами, маніпулюючий хобот 2 з кліщами, які захоплюють поковку 3, механізм пересування у вигляді двох колісних пар - передньої 4 та задньої 5. Маніпулятор рухається по направляючим рейкам 6. Додаткова колісна пара 7 зв'язана з рамою маніпулятора через шарнірно з'єднані важелі 8 і 9 та гідравлічним зв'язком у вигляді гідроциліндра 10 з запобіжною системою. Колісна пара 7 пересувається по додатковому рейковому шляху 11, який прокладено під вже існуючим шляхом 6 та паралельно йому. Гідроциліндр 10 виконано поршневим фіг.2. До його складу входять корпус 12 з кришкою 13, які стягнуті шпильками 14. Шток-тягу 15 та поршень 16 виконано ущільненими. Корпус 12 має шарнір 17 для з'єднання з віссю додаткової колісної пари 7. До верхньої порожнини 18 циліндра 10 тиск подається через отвір 19, а до нижньої 19 - через отвір 20. Запобіжну систему виконано у вигляді регульованого запобіжного клапана 21, манометра 22 та сигналізації 23. Ковальський маніпулятор працює таким чином. Системою керування ковальський маніпулятор по рейковому шляху 6 підводиться до ковальського обладнання. Через отвір 18 до верхньої порожнини 17 циліндра 10 підводиться тиск керування, під дією якого колісна пара 7 притискується до додаткового рейкового шляху 11. Нижню порожнину 19 через отвір 20 з'єднано зі зливом. Хобот 2 затискує поковку 3 і здійснюється технологічний процес обробки тиском поковки 3. Під час кування технологічні зусилля сприймаються додатковою колісною парою 7 через 10294 шток-тягу 15 і циліндр 10, а також додатково прокладеним рейковим шляхом 12, при цьому їх вплив на шасі 1 та елементи хобота 2 мінімальний. При перевищенні вантажного моменту над припустимим, тиск у порожнині 15 різко зростає. Через манометр 22 вмикається сигналізація 23. При цьому спрацьовує запобіжний клапан 21 і перепускає підвищений тиск на зброс. Затиск розтискується. У разі відсутності аварійної ситуації, після закінчення технологічного процесу обробки тиском [8\ поковки 3 тиск з порожнини 17 збрасується, а до порожнини 19 - надходить. Здійснюється розтискування колісної пари 7 з рейковим шляхом 11. Щоб уникнути заклинювання чи пробуксовування маніпулятора необхідно точно визначити величину тиску керування, що підводиться до циліндра 10, а також діапазон зміни тиску у порожнині 17 під час здійснення технологічного процесу з метою чіткого та точного настроювання запобіжного клапана 21. 9 \ 4 \ 2 Фіг.] Підб ід та зброс г
ДивитисяДодаткова інформація
Назва патенту англійськоюForging manipulator
Автори англійськоюRohanov Lev Leonidovych, Rohanov Maksym Lvovych, Korchak Olena Serhiivna
Назва патенту російськоюКузнечный манипулятор
Автори російськоюРоганов Лев Леонидович, Роганов Максим Львович, Корчак Елена Сергеевна
МПК / Мітки
МПК: B21J 13/00
Мітки: маніпулятор, ковальський
Код посилання
<a href="https://ua.patents.su/4-10294-kovalskijj-manipulyator.html" target="_blank" rel="follow" title="База патентів України">Ковальський маніпулятор</a>
Ковальський маніпулятор
Номер патенту: 5654
Опубліковано: 15.03.2005
Автори: Роганов Лев Леонідович, Корчак Олена Сергіївна
МПК: B21J 13/00
Мітки: ковальський, маніпулятор
Формула / Реферат:
Ковальський маніпулятор, що містить маніпулюючий хобот, шасі у вигляді зварної рами, механізм пересування у вигляді двох колісних пар, які переміщуються уздовж рейкового шляху і рух яким задається від приводу, який відрізняється тим, що оснащений додатковою колісною парою, що зв’язана з задньою колісною парою механізму пересування маніпулятора через регульований важіль, а з передньою - через важіль жорсткості, причому важелі оснащено...
Маніпулятор
Номер патенту: 9564
Опубліковано: 17.10.2005
Автори: Іванов Геннадій Олександрович, Бергер Євгеній Емильович, Табацков Вячеслав Петрович, Бергер Еміль Григорович
МПК: B25J 11/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, який має основу з силовим циліндром та захоплювач руки робота, який відрізняється тим, що він обладнаний кривошипно-шатунним механізмом, ланки якого шарнірно закріплені до штока корпусу силового циліндра кулісою, яка оснащена розмічальними штифтами.
Маніпулятор

Номер патенту: 50260
Опубліковано: 15.10.2002
Автори: Москаленко Олександр Володимирович, Вігдергауз Леонід Павлович
МПК: E21B 1/00
Мітки: маніпулятор
Формула / Реферат:
Маніпулятор, що складається із стріли, шарнірно приєднаної до нерухомої напрямної телескопічного подавача бурильної машини, спареного гідроциліндра переміщення подавача нагору і вниз, гідроциліндра переміщення стріли маніпулятора у вертикальній площині, гідроциліндра повороту стріли маніпулятора за допомогою рейкової зубчатої передачі і кронштейна, до якого приєднана стріла, і гідроциліндра переміщення стріли у вертикальній площині, який...
Ковальський зливок

Номер патенту: 54801
Опубліковано: 17.03.2003
Автори: Соколов Лев Миколайович, Марков Олег Євгенійович, Олешко Віктор Михайлович, Алієв Іграмотдін Серажутдінович, Михайленко Борис Омелянович
МПК: B21J 1/00
Мітки: ковальський, зливок
Формула / Реферат:
Ковальський зливок з піддоном, що включає прибуткову частину і тіло зливка, виконаного у вигляді багатогранника з гранями у вигляді кривої по її ширині, який відрізняється тим, що ковальський зливок виконано з увігнутою бічною поверхнею (по типу однопорожнинного гіперболоїда обертання) зі стрілою прогину = 0,08...0,12
Маніпулятор для установлення та знімання шиберних затворів
Номер патенту: 58993
Опубліковано: 15.08.2003
Автори: Слівченко Анатолій Іванович, Музирін Олександр Олегович
МПК: B25J 1/00, B22D 41/08
Мітки: затворів, знімання, маніпулятор, установлення, шиберних
Формула / Реферат:
Маніпулятор для установлення та знімання шиберних затворів, що містить нерухомий стояк, циліндр, на штоку якого встановлено з можливістю обертання стіл, важіль з вузлом кріплення циліндра,який відрізняється тим, що стіл додатково містить знімний пристрій для формування гнізда під сталерозливний вогнетривкий стакан, а вузол кріплення циліндра виконано у вигляді нерухомо закріпленого до торця важеля корпусу з пружиною, на яку встановлено...
Попередній патент: Спосіб визначення стану скоротливої функції міокарда у хворих на інфаркт міокарда
Наступний патент: Спосіб лікування пієлонефриту при вагітності
Випадковий патент: Привід в'язальної машини