Спосіб компенсації ефекту доплера

Формула / Реферат
Спосіб компенсації ефекту Доплера, який відрізняється тим, що за поточними даними про рух об'єкта в Гринвіцькій системі координат, які формуються апаратурою супутникової навігації рухомого об'єкта, та даними про місцезнаходження нерухомого пункту прийому пристрій керування обраховує радіальну швидкість, знак та величину зміни несучої та модуляційної частот та здійснює керування переналагоджувальним синтезатором частот, при цьому передавальним пристроєм формується сигнал, модуляційна та несуча частоти якого змінюються в залежності від зміни знака та значення радіальної швидкості між рухомим об'єктом та пунктом прийому.
Текст
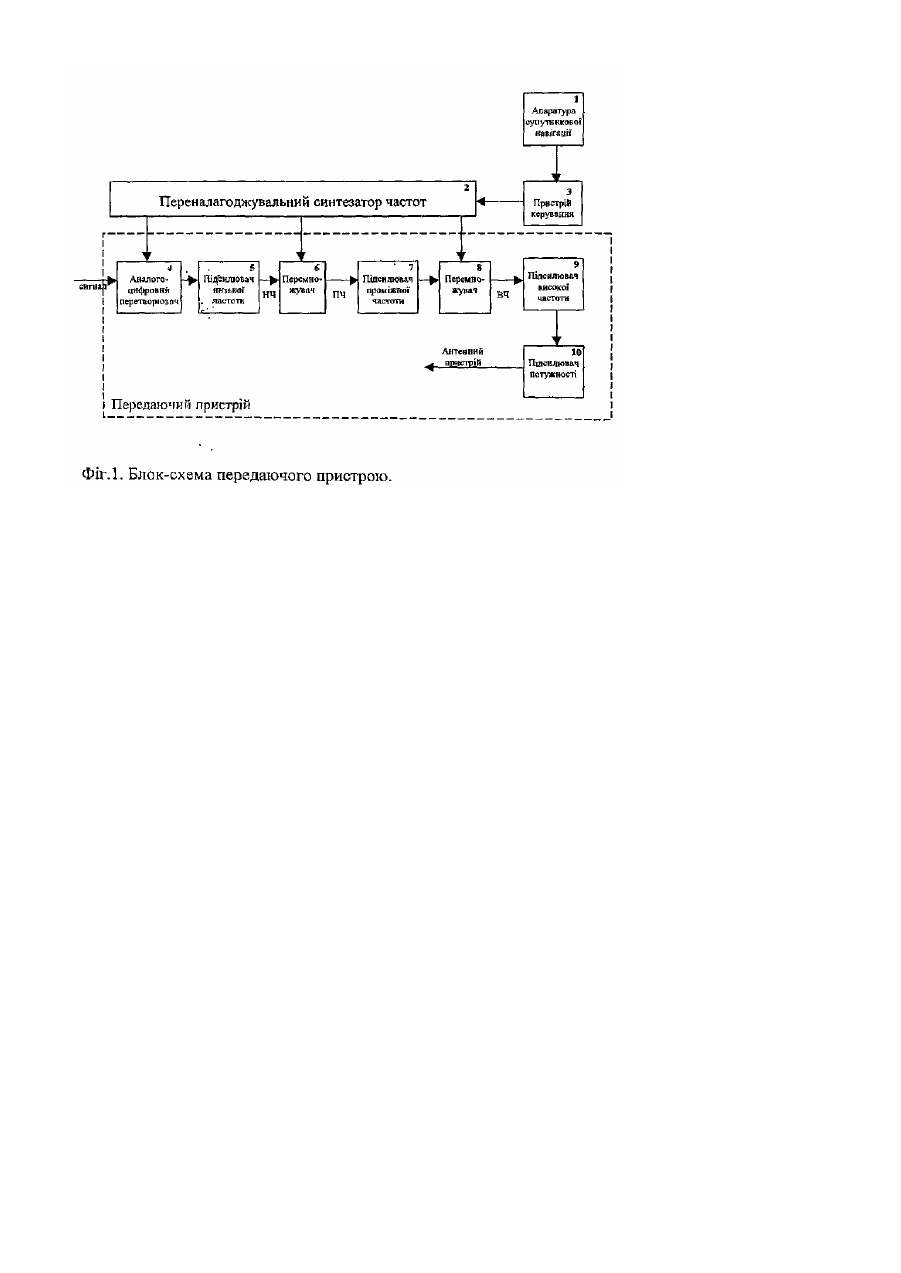
Пропонований винахід відноситься до області систем радіозв'язку, зокрема до систем, зв'язку з частотним розділенням каналів і може бути використаний в космічних системах зв'язку з рухомими об'єктами. Відомий спосіб компенсації явищ, які виникають при організації систем зв'язку з рухомими об'єктами, викликаних впливом ефекту Допплера [1-2], полягає в використанні АПЧ та установці на вхід приймальних пристроїв широкосмугових фільтрів. Недоліком .цього способу є те, що, по-перше, це приводить до збільшення потужності шумів Рш , Вт та вході приймача: Рш = k × Тш × D fэ k = 138 × 10- 23 , Вт Гц × град - стала Больцмана; Т ш - еквівалентна шумова температура приймача; Dfэ = h × D f де D f - смуга перепустки ВЧ-тракту приймача; æР ö h=ç с ÷ çР ÷ è ш ø min - мінімальне співвідношення сигнал/шум на вході детектора, необхідне для нормальної роботи кінцевих пристроїв, а, по-друге, не компенсує деформацію спектру сигналу. В основу винаходу поставлена задача створити спосіб компенсації явищ, викликаних ефектом Допплера, який шляхом керування переналагоджувальним синтезатором частот передаючого пристрою дозволив би забезпечити компенсацію явищ, що викликані ефектом Допплера. Для рішення поставленої задачі в способі компенсації ефекту Допплера пропонується спосіб, який полягає в тому, що за поточними даними руху об'єкту, які формуються апаратурою супутникової навігації, та даними місцезнаходження, нерухомого пункту прийому обчислювальний пристрій обраховує радіальну швидкість та здійснює керування переналагоджувальним синтезатором частот передаючого пристрою в залежності від зміни радіальної швидкості. На фіг.1 приведена блок-схема пристрою, що реалізує спосіб, який заявляється. Сутність запропонованого способу полягає в наступному. При радіозв'язку між рухомими та нерухомими об'єктами спостерігаються явища, викликані ефектом Допплера [1-2]: при русі джерела сигналу в бік прийому зі швидкістю n частота прийому f пов'язана з частотою передачі f0 співвідношенням: f= f0 1 n c0 (1) 10 Тут c 0 = 3 × 10 см/с - швидкість світла. n áá1 Загалом завжди виконується умова c0 , тому: æ n ö ÷ (2) f = f0 ç 1+ ç c ÷ 0ø è Узагальнюючи формули (1) та (2), одержимо: æ n ö ÷ = f ± f Þ fД = ± n × f0 (3) f = f0 ç 1 ± ç c0 ÷ 0 Д c0 è ø Якщо випромінювальний сигнал має спектр частот, то крім Допплерівського зміщення всього, спектру частот f на величину Д виникає також деформація спектру. Якщо спектр сигналу крім несучої f0 має дві бічні складові (f0 + F) та (f0 - F ) , то під дією ефекту Допплера ці складові одержать приріст: ü n ö n n ÷ = f0 + F + f0 +F = f0 ' +F' ï ÷ c0 c0 è c0 ø ï ï æ n ö ï (4) ÷ = f0 + f0 n = f0 ' f0 ç 1+ ý ç c ÷ c0 è 0ø ï ï æ ö (f0 - F) × ç1 + n ÷ = f0 - F + f0 n - F n = f0 '-F' ï ç c ÷ ï c0 c0 è 0 ø þ n F+ F = F + FД c0 де Розгляд всіх видів модуляції (AM, ЧM, ФМ) показує, що у всіх випадках вплив; ефекту Допплера приводить до æ ö ç1 + n ÷ ç c0 ÷ ø разів для всіх компонентів деформації всього спектру випромінюваного сигналу і викликає зміни частот в è спектру (в тому числі для тактової частоти). В системах зв'язку з використанням стаціонарних супутників-ретрансляторів ефект Допплера практично відсутній, тому вимоги до стабільності частот достатньо високі [2]. При цьому, в зв'язку з високими вимогами та æ (f0 + F )× ç1+ ç прийнятому частотному розділенні каналів розробка систем зв'язку між стаціонарним КА та КА на низьких орбітах потребує значних технічних затрат„пов'язаних з компенсацією впливу е фекту Допплера. Широкі можливості для цього відкриваються в зв'язку з обладнанням низькоорбітальних КА апаратурою суп утникової навігації [3], що зараз стає звичайною практикою. Вихідною інформацією ACH є: - поточні координати КА (в Гринвіцькій системі координат) xi , yi , zi , - складові вектору швидкості Vx i , Vy i , Vx i , - поточні значення часу (UTC). Нехай координати супутника-ретранслятору (або іншого нерухомого приймального пристрою) x0 , y0 , z 0 . Тоді відстань між ним та джерелом сигналу (КА) буде : Ri = ( x0 - xi )2 + ( y 0 - yi )2 + (z0 - zi )2 (5) В виразах (4 ¸ 10 ) під n розумілось те, що швидкість направлена вздовж лінії зв'язку. В загальному випадку, коли вектор швидкості може бути направлений під будь-якім кутом до лінії радіозв'язку, яви ща, викликані ефектом Допплера, будуть залежати від тієї компоненти швидкості, яка паралельна лінії зв'язку. Позначимо її як радіальну швидкість n рад : ( x 0 - x i )2 + (y 0 - yi )2 + ( z0 - z i )2 - ( x0 - xi-1 )2 + (y 0 - y i-1)2 + ( z0 - zi -1)2 dR DR Ri - Ri-1 = = = dt Dt t i - ti -1 ti - ti -1 при Dt ® 0 . або, для методу численного диференцювання (для, і-го значення параметрів об'єкту): n рад = 2 2 2 (8) dR d( x + y + z ) x × x + y × y + z × z = = = dt dt R x × Vx + y × Vy + z × Vz (x 0 - xi )( Vx 0 - Vx i )( y 0 - y i )( Vy 0 - Vy i )(z 0 - z i )( Vz 0 - Vz i ) = = R R Тепер, знаючи залежність Допплерівського зсуву від часу, достатньо легко виконати відповідний зсув несучої та модуляційної частот задаючого генератору передаючого пристрою. Пропонований спосіб може бути реалізований, наприклад, за допомогою пристрою, блок-схема якого приведена на фіг.1. Пристрій, містить (фіг.1) апаратуру супутникової навігації 7, пристрій керування 3, який .за поточними даними про рух об'єкту, що надходять з ACH, та заданими координатами пункту прийому здійснює обрахунок радіальної швидкості, знаку та величини змін несучої та модуляційної частот, управляючі сигнали з якого подаються на переналагоджувальний синтезатор частот 2 передаючого пристрою в складі: аналого-цифрового перетворювача 4, підсилювача низької частоти (НЧ) 5, перемножувала 6, підсилювача проміжної частоти (ПЧ) 7, перемножувача 8, підсилювача високої частоти (ВЧ) 9, підсилювача потужності 10 та антенний пристрий. Робота пристрою полягає в наступному: апаратура супутникової навігації 1здіснює пийом в реальному часі про поточні параметри руху в Гринвіцький системі координат, за якими та координатами нерухомого пункту пристрій керування 3 проводить розрахунок радіальної швидкості, знаку та величини зміни несучої та модуляційної частот, управляючі сигнали з якого подаються на переналагоджувальний синтезатор частот 2 передаючого пристрою 4 ¸ 10 . Пропонований спосіб у порівнянні з відомими має наступні технічні переваги: - відсутні явища де формації спектру сигналу, викликані дією ефекту Допплера; - зменшується смуга частот, що виділена для сигналу. Перелік посилань: 1. Агаджанов Π.Α., Горшков Б.М., Смирнов Г.Д. "Основы радиотелеметрии". М., Воениздат, 1971 -248 с. 2. Калашников Н.И. "Системы связи через ИСЗ" М. Связь, 1969 - 384 с. 3. Ефимов С.К., Нестерович А.Г., Яковченко А.И. "Аппаратура спутниковой навигации КА "Січ-1 М" и "Микроспутник"". Космічна наука і технологія. 2001, Т7, №4, с. 114-116. n рад =
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for compensating doppler effect
Автори англійськоюZahorulko Oleksandr Mykolaiovych
Назва патенту російськоюСпособ компенсации эффекта допплера
Автори російськоюЗагорулько Александр Николаевич
МПК / Мітки
МПК: H04B 7/26
Мітки: ефекту, доплера, компенсації, спосіб
Код посилання
<a href="https://ua.patents.su/3-63262-sposib-kompensaci-efektu-doplera.html" target="_blank" rel="follow" title="База патентів України">Спосіб компенсації ефекту доплера</a>
Похідні хіназоліну, спосіб їх отримання (варіанти), фармацевтична композиція, що їх містить, та спосіб досягнення антиангіогенного ефекту і/або ефекту зниження проникності кровоносних судин
Номер патенту: 57752
Опубліковано: 15.07.2003
Автори: Еннекен Лоран Франсуа Андре, Клейтон Едвард, Стоукс Елейн Софі Елізабет, Джонстоун Крейг, Ломан Жан-Жак Марсель, Томас Ендрю Пітер
МПК: A61P 35/00, C07D 417/12, A61P 27/02, C07D 401/12, C07D 403/12, C07D 239/94, C07D 239/93, A61P 3/10, C07D 413/12, A61P 9/10, A61K 31/541, A61P 9/00, A61P 13/12, C07D 405/12, A61P 37/02, A61P 43/00, A61P 37/00, A61K 31/5377, A61P 17/06, A61K 31/517, A61P 19/02, A61P 29/00
Мітки: кровоносних, досягнення, отримання, антиангіогенного, ефекту, похідні, проникності, фармацевтична, хіназоліну, зниження, спосіб, варіанти, містить, судин, композиція
Формула / Реферат:
1. Похідна хіназоліну формули I:, (І)деm є цілим числом 1 або 2;R1 являє собою водень, гідрокси, галоген, нітро, трифторметил, ціано, С1-3 алкіл, С1-3 алкокси, С1-3 алкілтіо або -NR5R6 (де R5 і R6, які можуть бути однаковими чи різними, кожен, являє водень або С1-3 алкіл);R2 являє собою водень, гідрокси, галоген, метокси, аміно або нітро;R3 являє собою гідрокси, галоген, С1-3 алкіл, С1-3 алкокси,...
Спосіб компенсації амплітудно-фазових викривлень у системі керування обертової ракети
Номер патенту: 49095
Опубліковано: 16.09.2002
Автори: Коростельов Олег Петрович, Доценко Борис Іванович, Косовенко Євген Вікторович, Кузьмін В'ячеслав Павлович, Семенов Леонід Антонович
МПК: F42B 15/01, G05B 11/01
Мітки: ракети, спосіб, компенсації, викривлень, амплітудно-фазових, обертової, керування, системі
Формула / Реферат:
Спосіб компенсації амплітудно-фазових викривлень у системі керування обертової ракети, заснований на вимірі динамічних викривлень, внесених елементами системи керування в модульований за допомогою синусно-косинусного перетворювача і гіроскопічного датчика кута крену управляючий сигнал, подачі на вхід слідкуючого приводу скоригованого сигналу, який відрізняється тим, що для компенсації амплітудних і фазових викривлень вхідний сигнал на привід...
Спосіб визначення мутагенного ефекту важких металів
Номер патенту: 53375
Опубліковано: 15.01.2003
Автори: Глухов Олександр Захарович, Сафонов Андрій Іванович, Хижняк Ніна Антонівна
МПК: A01G 7/00
Мітки: важких, спосіб, визначення, мутагенного, металів, ефекту
Формула / Реферат:
Спосіб визначення мутагенного ефекту важких металів, який включає облік показників порушення ембріонального розвитку рослин та свідчення за даними обліку про наявність мутагенного ефекту, який відрізняється тим, що для визначення віддалених та безпосередніх наслідків впливу факторів середовища, зокрема важких металів, використовують як тест-систему частоту та спектр аномалій для вже сформованого зародкового апарата, а саме гістогенна редукція...
Спосіб прогнозування розвитку толерантності до гемодинамічного ефекту пролонгованих нітратів у хворих на нестабільну стенокардію
Номер патенту: 60851
Опубліковано: 15.10.2003
Автори: Сидорова Людмила Леонідівна, Мясников Георгій Вікторович, Сидорова Наталія Миколаївна, Амосова Катерина Миколаївна
МПК: A61B 5/026
Мітки: стенокардію, нестабільну, пролонгованих, розвитку, ефекту, гемодинамічного, спосіб, хворих, толерантності, нітратів, прогнозування
Формула / Реферат:
Спосіб прогнозування розвитку толерантності до гемодинамічного ефекту пролонгованих нітратів у хворих на нестабільну стенокардію шляхом проведення доплерехокардіографічного дослідження, який відрізняється тим, що проводять визначення об'ємного кровотоку у фазу систоли лівого передсердя та при його величині 6,2 см та більше прогнозують розвиток толерантності до пролонгованих нітратів.
Сигнальний спосіб компенсації втрат електричної енергії в електричному колі
Номер патенту: 30905
Опубліковано: 15.12.2000
Автор: Іваницький Анатолій Мечиславович
МПК: H03H 7/01, H03H 11/04, H02M 9/00
Мітки: енергії, електричної, електричному, компенсації, втрат, спосіб, сигнальний, колії
Текст:
...спосіб має недоліки. Його можна використовувати для сигналів невеликої тривалості у часі, наприклад, для коротких радіоімпульсів, тому що з тривалим плином часу енергія сигналу різко зменшується. Задача винаходу слідуюча. В основу винаходу поставлено задачу в електричному колі, яке містить котушки індуктивності, конденсатори, резистори та k генераторів змінної напруги, шля хом того, що згадані генератори виробляють сигнали, будь-якої...
Попередній патент: Спосіб оцінки динаміки функціонального стану головного мозку інвалідів при проведенні реабілітаційних заходів
Наступний патент: Машина для контактного нанесення рідких розчинів гербіцидів на бур’яни
Випадковий патент: Кормова добавка для годівлі птиці