Пристрій для зважування ємності
Номер патенту: 16070
Опубліковано: 29.08.1997
Автори: Самарін Валерій Дмитрійович, Мацафей Анатолій Вікторович, Тімко Іван Васильович, Сачлі Георгій Лазаревич, Солок Яків Соломонович, Кленін Сергій Михайлович

Формула / Реферат
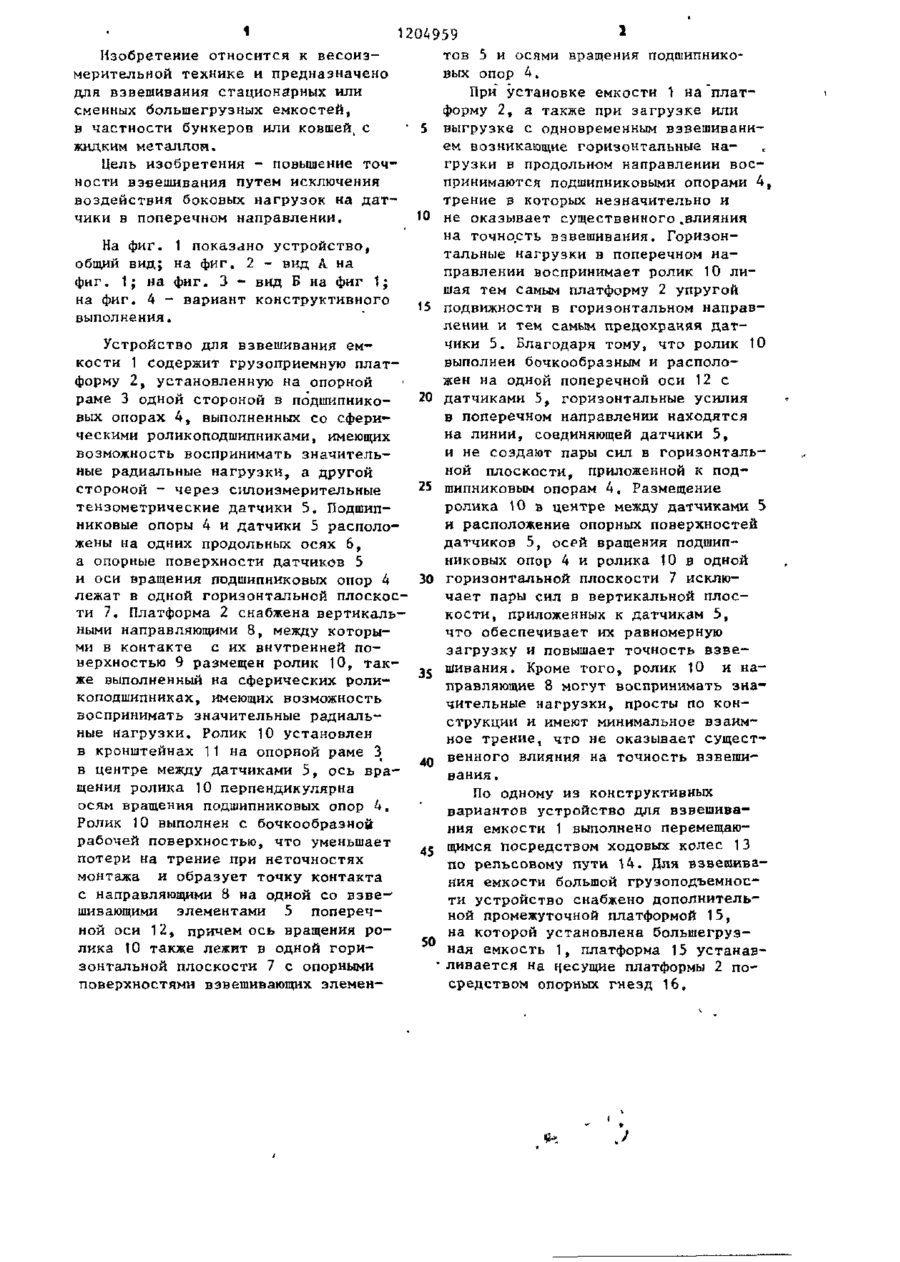
Устройство для взвешивания емкости, содержащее грузоприемную платформу, установленную на опорной раме одной стороной в подшипниковых опорах, а другой — через силоиз-мерительные датчики, отличающееся тем, что, с целью повышения точности взвешивания, грузо-приемная платформа снабжена направляющими, между которыми в контакте с их внутренней поверхностью размещен бочкообразный ролик, закрепленный на опорной раме на одной поперечной оси с силоизмерительными датчиками в центре между ними, при этом оси вращения подшипниковых опор и ролика взаимно перпендикулярны и лежат в одной плоскости с опорными поверхностями силоизмерительных датчиков.
Текст
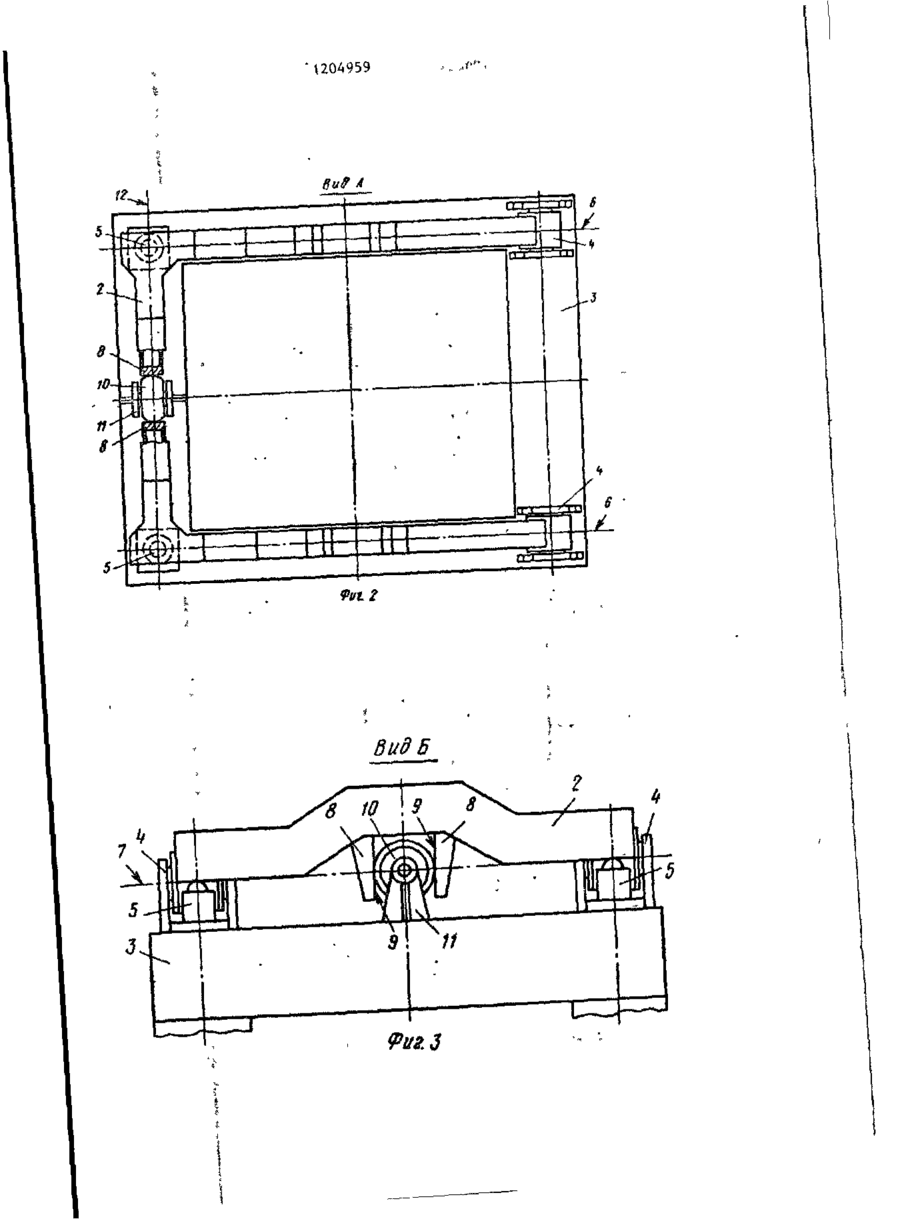
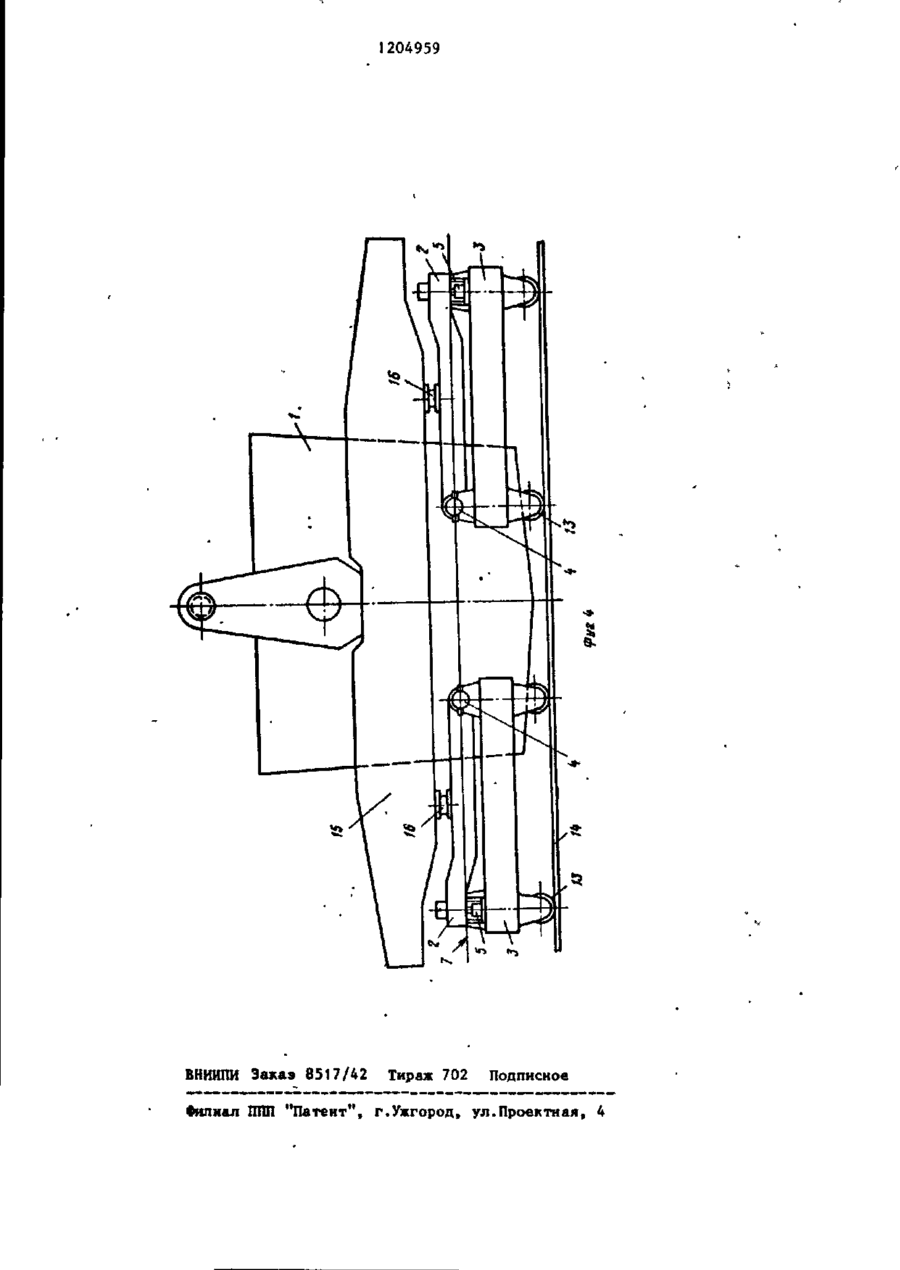
УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ЕМКОСТИ, содержащее грузоприемную платформу, установленную на опорной раме одной стороной в подшипниковых опорах, а другой - через силоизмерительные датчики, о т л и ч а ю щ е е с я тем, что, с целью повышения точности взвешивания, груэоприемная платформа снабжена направляющими, между которыми в контакте с их внутренней поверхностью размещен бочкообразный ролик, закрепленный на опорной раме на одной поперечной оси с силоиэмерительными датчиками в центре между ними, при этом оси вращения подшипниковых опор и ролика взаимно перпендикулярны и лежат в одной плоскости с опорными поверхностями силоизмерительных датчиков. (Л С Фиг 1 1204959 * Изобретение относится к весоизтов 5 и осями вращения подшипникомерительной технике и предназначено вых опор 4. для взвешивания стационарных или При установке емкости 1 на платсменных большегрузных емкостей, форму 2, а также при загрузке или в частности бункеров или ковшей, с • 5 выгрузке с одновременным взвешиванижидким металлом. ем возникающие горизонтальные нагрузки а продольном направлении восЦель изобретения - повышение точпринимаются подшипниковыми опорами 4, ности взвешивания путем исключения трение в которых незначительно и воздействия боковых нагрузок на датчики в поперечном направлении. tO не оказывает существенного .влияния на точность взвешивания. ГоризонНа фиг. 1 показано устройство, тальные нагрузки в поперечном наобщий вид; на фиг. 2 - вид А на правлении воспринимает ролик 10 лифиг. 1; на фиг. 3 - вид Б на фиг 1; шая тем самым платформу 2 упругой на фиг. 4 - вариант конструктивного 15 подвижности в горизонтальном направвыполнения. лении и тем самым предохраняя датчики 5. Благодаря тому, что ролик 10 Устройство для взвешивания емвыполнен бочкообразным и располокости 1 содержит грузоприемную платжен на одной поперечной оси 12 с форму 2, установленную на опорной раме 3 одной стороной в подшипнико20 датчиками 5, горизонтальные усилия вых опорах 4, выполненных со сферив поперечном направлении находятся ческими роликоподшипниками, имеющих на линии, соединяющей датчики 5, возможность воспринимать значительи не создают пары сил в горизонтальные радиальные нагрузки, а другой ной плоскости, приложенной к подстороной - через силоизмерительные 25 шипниковым опорам 4. Размещение тензометрические датчики 5. Подшипролика Ю в центре между датчиками 5 никовые опоры 4 и датчики 5 располои расположение опорных поверхностей жены на одних продольных осях 6, датчиков 5, осей вращения подшипа опорные поверхности датчиков 5 никовых опор 4 и ролика 10 в одной и оси вращения подшипниковых опор 4 30 горизонтальной плоскости 7 исклюлежат в одной горизонтальной плоскосчает пары сил в вертикальной плости 7. Платформа 2 снабжена вертикалькости, приложенных к датчикам 5, ными направляющими 8, между которычто обеспечивает их равномерную ми в контакте с их внутренней позагрузку и повышает точность взвеверхностью 9 размещен ролик 10, такшивания. Кроме того, ролик Ю и на35 же выполненный на сферических ролиправляющие 8 могут воспринимать знакоподшипниках , имеющих возможность чительные нагрузки, просты по конвоспринимать значительные радиальструкции и имеют минимальное взаимные нагрузки. Ролик 10 установлен ное трение, что не оказывает существ кронштейнах 1t на опорной раме 3 венного влияния на точность взвешив центре между датчиками 5, ось вра- 40 вания. щения ролика 10 перпендикулярна По одному из конструктивных осям вращения подшипниковых опор 4. вариантов устройство для взвешиваРолик 10 выполнен с бочкообразной ния емкости 1 выполнено перемещаюрабочей поверхностью, что уменьшает щимся посредством ходовых колес 13 потери на трение при неточностях по рельсовому пути 14. Для взвешивамонтажа и образует точку контакта ния емкости большой грузоподъемносс направляющими 8 на одной со взве-ти устройство снабжено дополнительшивающими элементами 5 поперечной промежуточной платформой 15, ной оси 12, причем ось вращения рона которой установлена большегруз50 ная емкость 1, платформа 15 устанавлика ТО также лежит в одной горизонтальной плоскости 7 с опорными ливается на несущие платформы 2 посредством опорных гнезд 16, поверхностями взвешивающих элемен 120A959 *Put2 Вид Б 1204959 ВНИИПИ Заказ 8517/42 Тираж 702 Подписное Филиал ППП "Патент", г.Ужгород, ул.Проектная, 4
ДивитисяДодаткова інформація
Назва патенту англійськоюAppliance for vessel weighting
Автори англійськоюMatsafei Anatolii Viktorovych, Solok Yakiv Solomonovych, Sachli Heorhii Lazarevych, Klenin Serhii Mykhailovych, Timko Ivan Vasyliovych, Samarin Valerii Dmytriovych
Назва патенту російськоюУстройство для взвешивания емкости
Автори російськоюМацафей Анатолий Викторович, Солок Яков Соломонович, Сачли Георгий Лазаревич, Кленин Сергей Михайлович, Тимко Иван Васильевич, Самарин Валерий Дмитриевич
МПК / Мітки
МПК: G01G 19/00
Мітки: зважування, ємності, пристрій
Код посилання
<a href="https://ua.patents.su/4-16070-pristrijj-dlya-zvazhuvannya-ehmnosti.html" target="_blank" rel="follow" title="База патентів України">Пристрій для зважування ємності</a>
Пристрій для зважування рухомих залізничних составів
Номер патенту: 12608
Опубліковано: 28.02.1997
Автори: Сільванський Микола Олександрович, Нікітінський Михайло Павлович, Цимбалюк Анатолій Григорович
МПК: G01G 19/04
Мітки: рухомих, составів, зважування, пристрій, залізничних
Формула / Реферат:
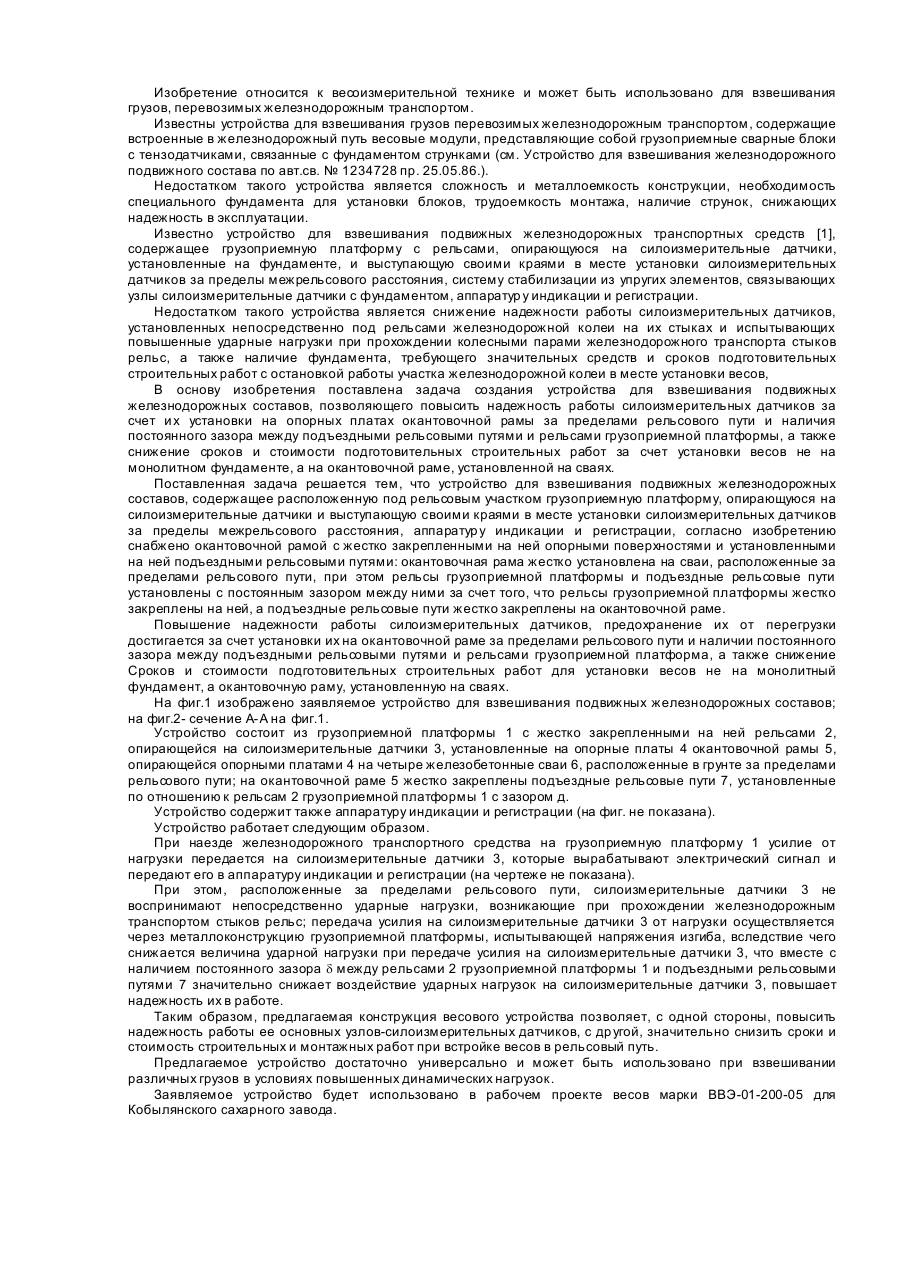
Устройство для взвешивания железнодорожных подвижных составов, содержащее расположенную под рельсовым участком грузоприемную платформу с рельсами, опирающуюся на силоизмерительные датчики и выступающую своими краями в месте установки силоизмерительных датчиков за пределы межрельсового расстояния, аппаратуру индикации и регистрации, отличающееся тем, что оно снабжено окантовочной рамой с жестко закрепленными опорными платами и...
Пристрій для зважування місткості, яка кантується

Номер патенту: 12178
Опубліковано: 25.12.1996
Автори: Брук Олександр Семенович, Постніков Євген Петрович, Пичул Леонід Григорович, Набоков Валерій Олександрович, Мацафей Анатолій Вікторович, Солок Яків Соломонович
МПК: G01F 17/00, G01G 15/00
Мітки: зважування, кантується, яка, пристрій, місткості
Формула / Реферат:
1. Устройство для взвешивания кантуемой емкости, включающее установленную в подшипниковых опорах емкость и взаимодействующие с опорами весовые колонки, отличающееся тем, что, с целью повышения точности взвешивания и увеличения надежности в работе, опорные подшипники установлены на U-образной балке с консолями, опирающимися посредством упругих элементов на весовые колонки, размещенные в опорных стойках.2. Устройство по п.1,...
Пристрій для зважування рухомих залізничних составів
Номер патенту: 13900
Опубліковано: 25.04.1997
Автори: Нікітінський Михайло Павлович, Сільванський Микола Олександрович, Цимбалюк Анатолій Григорович
МПК: G01G 19/04
Мітки: зважування, залізничних, пристрій, составів, рухомих
Формула / Реферат:
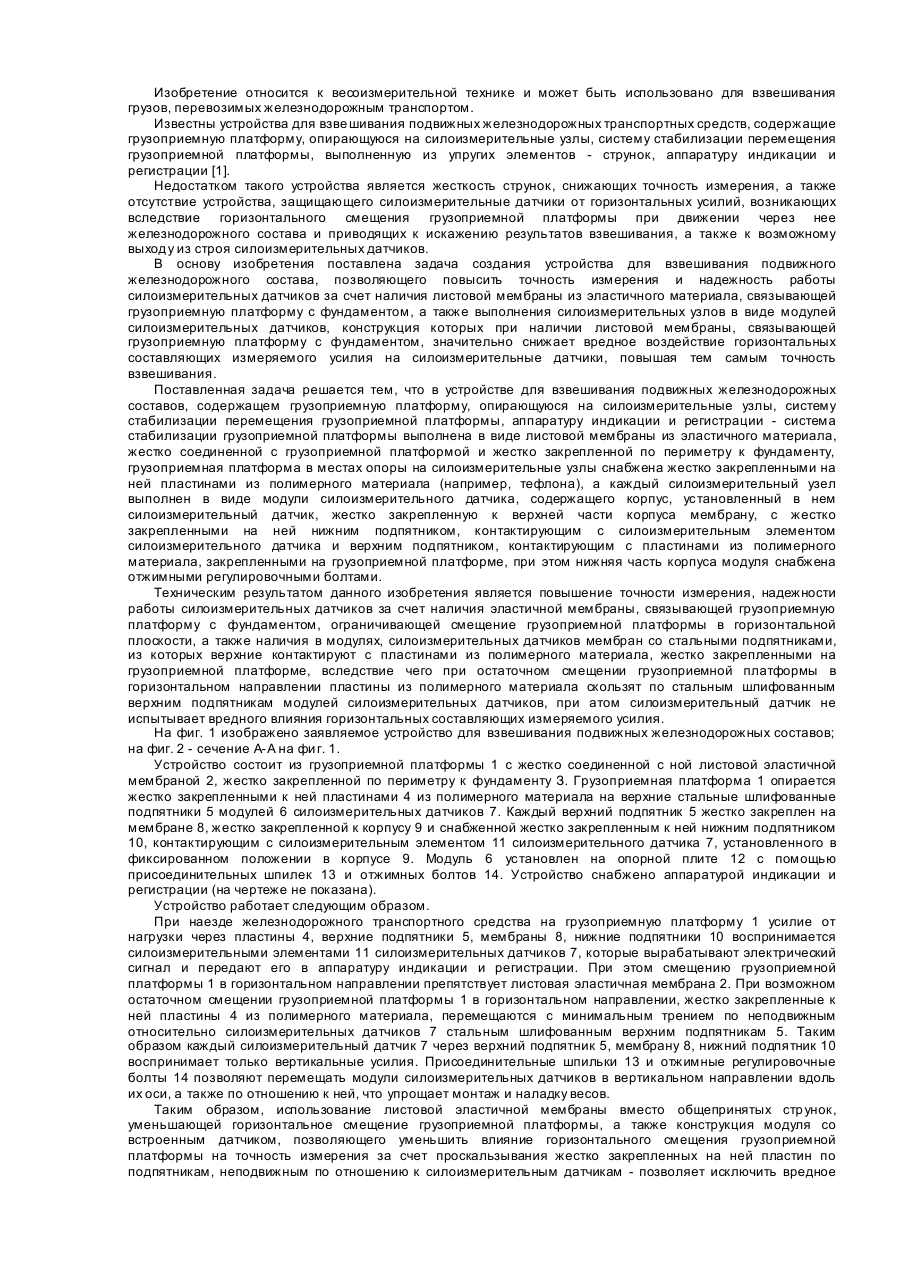
Устройство для взвешивания подвижных железнодорожных составов, содержащее грузоприемную платформу, опирающуюся на силоизмерительные узлы, систему стабилизации перемещения грузоприемной платформы, аппаратуру индикации и регистрации, отличающееся тем, что система стабилизации перемещения грузоприемной платформы выполнена в виде листовой эластичной мембраны, жестко соединенной с грузоприемной платформой и жестко закрепленной по периметру к...
Пристрій для порційного зважування сипучих матеріалів
Номер патенту: 13822
Опубліковано: 25.04.1997
Автор: Чеботарьов Григорій Аврамович
МПК: G01G 13/00
Мітки: пристрій, матеріалів, порційного, зважування, сипучих
Формула / Реферат:
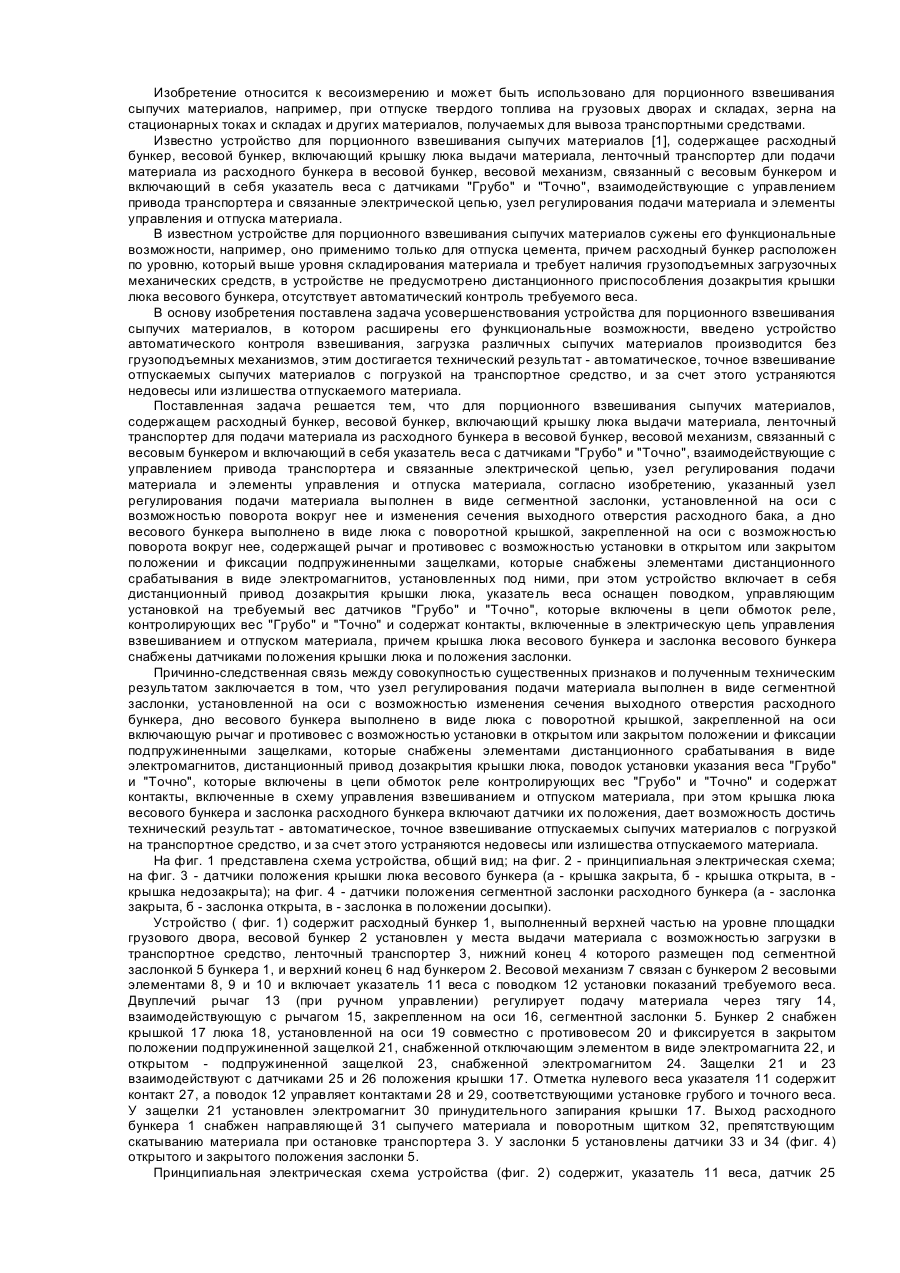
Устройство для порционного взвешивания сыпучих материалов, содержащее расходный бункер, весовой бункер, включающий крышку люка выдачи материала, ленточный транспортер для подачи материала из расходного бункера в весовой бункер, весовой механизм, связанный с весовым бункером и включающий в себя указатель веса с датчиками "Грубо" и "Точно", взаимодействующие с управлением привода транспортера и связанные электрической...
Пристрій осадченка в.с. для затулення пробоїн з рваними краями в стінці ємності
Номер патенту: 757
Опубліковано: 15.12.1993
Автор: Осадченко Василь Семенович
МПК: B63C 7/00
Мітки: пристрій, рваними, затулення, пробоїн, осадченка, краями, в.с, стінці, ємності
Формула / Реферат:
Формула изобретения Устройство для заделки пробоин содержащее жесткий пластырь, герметизирующую прокладку, внутреннюю опору и подтягивающий элемент, отличающееся тем, что, с целью упрощения конструкции, внутренняя опора выполнена в виде конусной пружины сжатия.
Попередній патент: Телескопічна штанга
Наступний патент: Пристрій для поділу сипких матеріалів по крупності
Випадковий патент: П`єзоелектричний перетворювач механічних величин